Open Access version via Utrecht University Repository
advertisement

Bram van Dijk, 2012
0. Abstract
Prehension movements are governed by an elaborate system. This study points out certain
inconsistencies in the researches which study these movements and provides a framework on
which future research can be based. This framework was tested by an experiment. This
experiment not only confirmed the usefulness of said framework but also provided evidence for
two claims. Firstly, as predicted by the Tipper model, an ipsilateral flanker can influence
prehension movements. Secondly, the speed at which prehension movements are conducted has
a large influence on horizontal deviations of these movements.
1. Introduction
Reach-to-grasp (prehension) movements require the hand to be transported to the desired
location while adequately matching the grasp aperture to the dimensions of the target object
(Mon–Williams, Tresilian, Coppard & Carson, 2001)). In a prehension movement, the hand
rarely touches non-target objects (called non-targets), suggesting that the motor system takes
possible obstructions into account and incorporates them into motor plans and their execution
(Chapman & Goodale, 2008)). These non-targets alter the spatial and temporal trajectories of
reaching and grasping (e.g. Castiello, 1996; Dean & Brüwer, 1994; Kritikos, Bennet, Dunai &
Castiello, 2000; Tipper, Howard & Jackson, 1997; Tresilian, 1998). Researchers have
performed extensive investigations into the role of particular features of both targets and nontargets (and also on the relation between them) and how they influence the prehension
movement. Some examples include: object location (Mon–Williams, Tresilian, Coppard &
Carson, 2001), object size (Bootsma, Marteniuk, MacKenzie & Zaal, 1994), target orientation
(Biegstraaten, Smeets & Brenner, 2003) and combinations of both the orientation and the size
of the objects (Chapman & Goodale, 2008).
A distinct class of non-targets are so-called flankers. Flankers are objects placed in such
a position that the path the hand takes when these flankers are not present would not coincide
with the location of the flankers. Interestingly, these flankers can still influence the prehension
movements (Tresilian, 1998; Biegstraaten et al., 2003). A theoretical model that tries to explain
the trajectories of the hand in the presence of flankers is further explained in section 1.4.
Surprisingly, researchers have not shown much consistency in reach-to-grasp
experiments. E.g. they have placed the markers from which they derived their results at
different places (such as the thumb, the wrist and the elbow), have been using different
kinematic parameters (KPs from here on, more on these in part 1.1) as pointed out earlier by
Kritikos and colleagues (Kritikos et al., 2000) and have been using different amounts of
participants (from as few as five (Bootsma et al., 1994) up to 25 (Geronimi & Gorce, 2007))
without explaining exactly why (Dean & Brüwer, 1994). Although some of these
inconsistencies might not seem relevant, there is no scientific basis to back this up.
This study does not aim to provide a strict set of rules all future research should follow.
However, I will try to provide a starting point by answering the following question: “Is it
possible to create a basic set of kinematic parameters in the obstacle avoidance kinematics?”
This set will henceforth be known as the Ba(sic)s(etof)ki(nematic)p(arameters). To provide a
preliminary answer to this question, the literature will be reviewed (see section 1.1).
To test this preliminary answer, an experiment will be conducted which will determine
if there is a direct link between the trajectory of a reach-to-grasp movement and the speed of
said movement. This experiment will be expanding on Kritikos et al. (2000), who were some of
the few to notice that “the paradigms of Tipper and colleagues (Howard & Tipper, 1997;
Tipper et al. 1997) involved speeded movements, but Castiello (1996) and Bonfiglioli and
Castiello (1998) did not instruct participants as to the speed of movement.” (page 133). Not
only did they notice that, but they also gave an explanation as to why this was important:
“Speed requirement may place different constraints on the calculation of volumetric properties
of the stimuli and on the coordination and execution of reach-to-grasp-parameters. During fast
movements in the presence of distractors, therefore, we expect alterations in trajectories, such
that they deviate away from the distractor (Howard & Tipper, 1997; Tipper et al., 1997).”
(page 133). The experiment will determine whether these alterations can be shown (see 1.2).
1.1 Baskip
Over twenty theses were reviewed with special attention for the KPs (kinematic
parameters, such as “grasp aperture” and “movement time”) used in these studies. A data set
was made of ‘relevant’ KPs. A relevant KP (RKP) is a KP used in more than ten percent of the
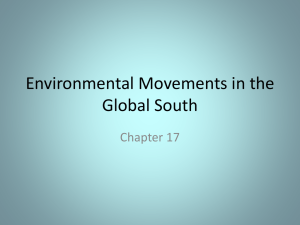
studies. Any KP which isn’t a RKP is not eligible for the Baskip. Figure 1.1 depicts the relevant
KP ratio for the last eighteen years. This ratio was calculated per year by the following formula:
KPs[YEAR]
RKPRatio[YEAR] . The ratio demonstrates that throughout the years new
RKPs[YEAR]
parameters have been added to the entire set of parameters. This may be a reflection of
improvements in measuring devices.
Relevant KP ratio
2,5
2
1,5
Relevant KP ratio
1
0,5
0
1990
1995
2000
2005
2010
Figure 1.1 The relevant KP ratio per year from 1993-2009. Note: The value for 1999 was interpolated
(Y(1998)+Y(2000))/2).
If there was a Baskip right now, then the RKP ratios for the last couple of years should
all be (nearing) 1. As this graph clearly shows, the RKP ratio does not decline to 1. Therefore,
there is (at the time of writing) no consensus over which KPs should be used for the Baskip.
For the above graph the X and Y coordinates have all been grouped into one category.
However, the X and Y KPs used in the studies were actually quite varied: “X coordinate of
shoulder” (Dean & Brüwer, 1994), “X coordinate of little finger” (Tipper et al., 1997) and
“X@100mm” (Goodale & Chapman, 2009) were but some of the somewhat subjectively
chosen spatial parameters used in previous research. Since this study aims to provide a basic
and objective set all studies can use, it will not make these distinctions but from now on will
instead categorise the X and Y coordinates throughout the movements as two KPs. See section
1.3 and 3.1 and 4.4 for further details on how I grouped all the separate X and Y parameters
together. My method is based on the works of Chapman & Goodale (Chapman & Goodale,
2010).
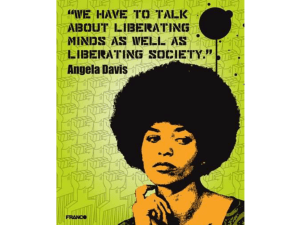
A Baskip was generated by determining the most used RKP’s. This was expressed as:
Amount _ of _ theses _ the _ KP _ is _ used _ in
. This ensured that every KP ratio was between
Total _ amount _ of _ theses
0.1 and 1. A KP ratio of 1 means that a KP is used in every single thesis I incorporated in my
analysis. A KP ratio of .5 means that that KP is used in half of the theses used etc. An overview
of the KP ratio of every RKP is given in figure 1.2.
1
0,9
KP ratio ->
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
co
or
di
na
te
Y
co
or
di
na
te
Z
co
or
di
na
te
to
X
oc
it y
pe
ak
pe
ak
to
Ti
m
e
e
m
Ti
ve
l
gr
as
p
t im
e
ty
Re
ac
t io
n
ve
lo
ci
im
e
Pe
ak
en
tt
M
ov
em
ap
er
tu
re
G
ra
sp
De
ce
le
ra
t io
n
tim
e
0
Figure 1.2. The KP ratio of the Relevant Kinematic Parameters.
Using a cut-off KP ratio of 0.40, the temporary basic set of kinematic parameters
(TempBaskip) was determined: {Grasp aperture, Movement time, Peak velocity, Time to peak
velocity, X coordinate, Y coordinate}.
Please note: there were two reasons why the cut-off ratio of 0.4 was used. Firstly, the
KPs with a KP ratio of .2 are just not relevant enough for most studies. Deceleration time was
never used to conclude anything and reaction time was rarely described in detail (with the
notable exception of Tipper and colleagues (Tipper et al., 1997)). Secondly: even though “Time
to peak grasp” and “Z coordinate” both have a KP ratio of 0.4, these KPs were barely ever used
in the actual conclusion of the theses I used in my analysis.
If consistent differences can be found between conditions across all parameters of the
TempBaskip, this indicates the TempBaskip provides a useful starting point for future research.
If a parameter will not provide any relevant information, it will be removed from the final
Baskip.
1.2 Speed experiment
This experiment sought to determine whether there is a notable difference in the reachto-grasp movement if the participants are asked to make a prehension movement as quickly as
possible, or as fast as they like. This is because, in most experiments, it was unclear how fast
the participants were asked to move their hand to the target (e.g. Mon-Williams et al. (2001)).
Therefore, it is imperative to determine in what manner speed influences prehension
movements.
A similar study (Kritikos et al., 2000) suggested that an explicit speed instruction is
required, but the results may have been limited to the particular setup used in that experiment:
the flankers were placed around the target and not halfway between the target and the starting
point. This is in sharp contrast with the majority of the other studies, which preferred nontargets at locations around the centre line from the actor to the target. Therefore, I will conduct
an experiment with flankers at multiple locations (see section 2.4), while testing the
TempBaskip determined earlier. This way, not only will I be able to cement both my
conclusions about whether I will be able to determine a Baskip, but I will also be able to give a
definitive answer to the question “Does the speed of a reach-to-grasp movement influence the
movement?” If the answer to that question is “yes”, then further research should be done to
determine the precise effects of speed on reach-to-grasp movements.
To test this experiment, three participants both piloted the design and provided input for
the custom built algorithm used in the data analysis. For the final version of the experiment, an
additional ten participants were tested.
1.3 Spatial Parameters
It should be noted that a lot of studies did not treat the spatial parameters as two (or
three if the Z-coordinate was included) continuous parameters. Naturally, the exact values of
these parameters are defined by the temporal (and spatial) resolution of the measuring
equipment used and are always somewhat discrete. Regardless, using cubic spline interpolation
any movement can and should be divided into one hundred Cartesian coordinates in a two-(or
three-) dimensional plane. For further precision this could, of course, be interpolated to any
amount deemed necessary. However, it is imperative that these sets are of equal size.
If all movements are brought down to similar-sized sets of Cartesian coordinates,
multiple (M)ANOVA’s can be run on the entire movement. This method (see sections 3.1 &
4.4) is much more objective and complete than using subjective parameters such as ‘X @ 100’
(Chapman & Goodale, 2008) and therefore whenever I mention “X/Y/Z coordinate” I refer to
the X, Y and/or Z coordinates as a continuous movement.
1.4 Tipper Model
This study subscribes to the Tipper Model to account for the expected deviations of the
hand (Tipper et al., 1997). This model states that “‘it is essential that organisms have the
capacity to resist the strongest response of the moment [ … ] By necessity, this system must
represent more than the target object for action. To guide the hand past irrelevant objects
requires that those objects be represented” (page 2). Before all the semantic properties of a
non-target are established, its representation is processed by the fast responding dorsal stream,
causing the hand to miss the non-target by a rather wide margin. This would indicate
prehension movements would veer away from non-targets, even when those non-targets are not
directly obstructing the movement that would be made in the absence of these non-targets.
Recall that members of this sub-category of non-targets are called flankers.
On the same page, Tipper states that “non-target, to-be-ignored objects are represented
in terms of the volumetric space they occupy, and that they compete for the control of action.”
If this is true, we expect the flankers that are closest to the normal path the hand would take to
influence the trajectory the most, since their representations would compete the most for the
control of action.
2. Methods
2.1 Apparatus
Participants were seated on a chair behind a table (approx. 120 cm x 60 cm). The
workspace reserved on this table for the experiment was 40 by 40 cm. The participants wore
Plato goggles (Translucent Technologies, Toronto Canada) which were used to block the vision
of the participants in between trials. Position data was recorded by two electromagnetic sensors
with a sampling rate of 100 Hz., These sensors were attached to the participants’ right thumb
and index finger. They were controlled by a miniBird computer (Ascension Technology
Corporation, Burlington, USA), and Presentation software which was installed on an IBM
Thinkpad A31. Finally, the data was put in graphs by using Matlab 2010 (see section 2.6).
2.2 Stimuli
The stimuli used were red and wood-coloured cylinders. These had a 5.1cm diameter
and were 15.1cm tall. Apart from those cylinders, the speed instruction was voiced by the
researcher, who told the participant in between trials whether the upcoming trial was supposed
to be done as quickly as possible or at a normal pace.
2.3 Participants
The thirteen participants were all healthy right-handed individuals, which was
determined by self-report. They all received a small fee for their cooperation.
2.4 Design
The non-targets were presented in four different locations; left or right of the centre and
mid way between the start and target location or at the same depth as the target. See figure 2.1
for a top-down view of the workspace with all possible non-target locations. I also presented
participants with a control condition in which no non-target was present when they had to reach
for the target. All these conditions were performed under two different speed instructions; as
fast as possible or at normal speed. This makes a total of 10 different conditions. Each of these
conditions was repeated 10 times. This makes a grand total of 100 trials during the experiment.
Participants also performed 10 practice trials to get accustomed to the experimental procedure.
The different conditions were randomized across participants in blocks of 50 trials. Each block
contained five trials per condition.
Apart from the actual trials, twenty fake trials were randomly distributed across the
experiment. In a fake trial, a red cylinder was placed at point C. The participants were told in
advance that they should not make the reach-to-grasp movement when the red cylinder was
present. These no-go trials were included to ensure attention was held throughout the
experiment and that object identification preceded action initiation.
Figure 2.1 Dimensions of the experimental setup. S stands for Starting Position, T for target and F for a location
at which the flanker can be placed: {Top, Bottom} X {Right, Left}. C stands for centre: no object is placed there
but it’s used to calculate the distances of the other elements. The line TS is 40 centimetres long, with C at the
centre. The lines T{Top, Right}, T{Top, Left}, C{Bottom, Left} and C{Bottom, Right} are all x (20 centimetres)
long. All the corners are 90 degrees. The participants were seated in such a way that their hands made an angle of
45 degrees with the centre line. This was to ensure that all the participants had the same starting position. This
angle was haptically identifiable to ensure that the participants quickly returned to the same position for each
trial.
2.5 Procedure
After the proper configuration of the workspace for each trial was achieved, participants
were told how fast the movement was supposed to be made. Following a button press by the
experimenter the participant would wait until he or she heard an auditory signal to prompt
movement start. The signal would be presented between 800-1200ms (randomised) after the
button was pressed. After this signal, the goggles no longer blocked the participant’s vision,
prompting him or her to let go off the start-button (which started the measurement) and perform
the reach-to-grasp task. As soon as he or she lifted the target, the measurement stopped. He or
she then put their hand back on the start-button, which caused the goggles to shut. This
prompted the experimenter to prepare the next trial.
2.6 Data acquisition & analysis
The X, Y and Z position output was analysed with a custom-built algorithm (Matlab
7.10.0.499 (r2010a), The Mathworks Inc.), which applied a 6th order dual-pass low-band
Butterworth filter (0.4) and normalized using another algorithm to allow for direct comparison
of trials. The data was then visualised in a GUI. This allowed for visual feedback of the data
which was needed for the detection of mistrials. An example of this can be seen in figure 3.1.
Furthermore, this Matlab program also extracted all the Baskip-data needed (as shown in figure
3.4 and table 3.3).
For the actual statistical analysis I used an ANOVA analysis. See Results (figure 3.2 in
particular) for more information. This analysis ensured any significant difference could be
measured during the course of the reach-to-grasp movements.
3. Results
3.1 Differences in trajectories
As there were ten conditions, the amount of possible comparisons between conditions was
45. However, with just fourteen comparisons all the relevant results can be shown since a lot of
the conditions did not differ from their control conditions (see table 3.1 and figures 3.2/3.4).
The normal control condition was first compared to the fast control condition.
Figure 3.1 This graph displays the means of the x-derivations of the hand during the normal control condition
(red) and the fast control condition (blue). As described in section 1.3, each movement was converted to 100
coordinates in a two-dimensional plane.
Next each movement was reduced to 100 means and 100 standard errors. By comparing
each pair <mean1, error1> of one condition to the pair <mean2, error2> of another condition,
the relevant difference for each percent of the movement could be calculated using an ANOVA.
By applying this method to the data displayed in figure 3.1, figure 3.2 was created.
Figure 3.2 By applying an ANOVA to each percent of the movements, this figure was created. The red line shows
an alpha of 0.05. Any value to the left of the red line means that, for that percentage of the movement, the two
conditions differ. This figure clearly shows that between the intervals [19,36] and [72,95] the movements
portrayed in figure 3.1 significantly differ. In other words, when reaching towards a target the normal control
condition movements significantly differ from the fast condition movements between 19-36% and 72-95% of the
movement in the y-direction. Apart from those two intervals, the movements are the same.
Figure 3.3a This figure shows the means of the rest of the normal speed conditions. Black: Bottom left, Blue:
Bottom Right, Red: Top Left, Cyan: Top Right.
Figure 3.3b This figure shows the means of the rest of the fast speed conditions. Black: Bottom left, Blue: Bottom
Right, Red: Top Left, Cyan: Top Right.
Using the method described at figure 3.2 and the data of which the means are displayed
in figures 3.3a/b, table 3.1 was created. Table 3.1 shows multiple findings. Firstly, the nontarget at bottom-right condition significantly differs from the control conditions whether the
movement was made at normal speed or as quickly as possible. This was to be expected, since
this condition put the flanker closer to the movement of the control condition than any of the
others. Secondly, the normal non-target at top-right condition significantly differs from the
normal control condition on a very small interval. This too was expected: these two findings fit
the Tipper model as mentioned in section 1.4 since those locations are closest to the control
path (see section 4.5). Thirdly, table 3.1 shows that the non-target at bottom left or top left
conditions did not differ from the control conditions.
More importantly, table 3.1 and figure 3.2 clearly show that when asked to make a
movement as quickly as possible, the resulting movement will significantly differ from a
movement where the participants are asked to make it at a normal pace. As seen in 3.1 and
3.3a/b, the faster condition movements generally stay closer to the centre line until about
halfway through. After that, the faster movements sway more to the right than the slower
movements.
Alpha = 0.05
Normal
versus
Control
Fast
versus
Control
Bottom Left
No
significant
differences
found
No
significant
differences
found
Top Left
No
significant
differences
found
No
significant
differences
found
Bottom Right
Normal
versus
Fast
Top Right
No
significant
differences
found (,
however
with alpha
= 0.1 there
was)
Table 3.1 This table shows the comparison between all of the conditions I was initially interested in. The
individual figures were created using the method explained in figure 3.2. The red line represents an alpha of 0.05.
If the blue line is to the left of the red line for a certain interval, then that interval is an interval where the two
conditions differ significantly.
For completeness’ sake, the final spatial-parameters groups were derived using table
3.1. Since there were no significant differences between the normal control and the normal
bottom left conditions, as well as between the normal control and the normal bottom right
conditions, these three were grouped into one group. Applying this method led to five groups:
Group 1: NC=NBL=NTL, Group 2: FC = FBL=FTL=FTR, Group 3: NBR, Group 4: NTR,
Group 5: FBR. (N = Normal, F = Fast, B = Bottom, T = Top, L = Left, R = Right, C = Control)
The comparisons between these groups are shown in table 3.2.
Table 3.2 This is the final spatial parameter comparison table which shows all the relevant differences found in the
spatial parameters. Group 1: NC=NBL=NTL, Group 2: FC = FBL=FTL=FTR, Group 3: NBR, Group 4: NTR,
Group 5: FBR. As in table 3.1, the red line represents an alpha of 0.05. If the blue line is to the left of the red line
for a certain interval, then that interval is an interval where the two groups differ significantly.
3.2 Differences in the rest of the Baskip parameters
Figure 3.4 and table 3.3 display the means of the experimental conditions for all the
Baskip-parameters except for the X and Y coordinates (which are described in section 3.1).
Figure 3.4 This figure shows the rest of the Baskip-parameters. The bars represent the means of the parameters
per condition and the black lines represent the standard deviation of the parameters per condition. To make sure
all of the data fitted in one figure, some of the scales were adjusted (see the legend). MT = Movement Time, PV =
Peak Velocity, TTPV = Time To Peak Velocity and PGA = Peak Grasp Aperture.
Table 3.3 The table from the same data of which figure 3.4 was created. It only displays the means of the
parameters. Movement time is in centiseconds, peak velocity is in mm/cs, time to peak velocity is in cs and peak
grasp aperture is in mm.
I performed a 2 factor repeated measures ANOVA (speed [2 levels; fast, normal], side [2
levels; left, right], proximity [2 levels; bottom, top]) across the experimental conditions
movement time, peak velocity, time to peak velocity and peak grasp aperture. The ANOVA
showed that speed had a significant effect on movement time (F (1,19) = 29.38, p < .001), on
peak velocity (F (1,19) = 14.6, p < .01) and on time to peak velocity (F (1,19) = 9.13, p < .01).
Between the grasp apertures, no significant difference was found between normal and fast
movements.
Only one other relevant result was found: the non-target at bottom-right conditions
significantly reduced the peak grasp aperture (F (1,19) = 5.15, p < .05 for normal speed and F
(1,19) = 4.62, p < 0.05 for fast speed). This indicates that the fingers stay closer together when
the hand is making an evasive movement.
3.3 Side notes
It should be noted that table 3.1 and table 3.3 both indicate two claims:
1: As predicted by the Tipper model, an ipsilateral flanker influences the motion of the human
hand.
2: A movement at a normal pace is different from a movement at a fast pace.
It is important to see that both these tables support these claims, because this is a confirmation
that all the Baskip parameters show consistent differences between conditions: the differences
in the spatial parameters and grasp aperture provide back-up for the first claim and the
differences in the spatial parameters, movement time, peak velocity and time to peak velocity
provide back-up for the second claim.
4. Discussion
4.1 General Notes
First and foremost, this study sought to clarify the field of obstacle avoidance kinematics.
This was done by consulting the literature, creating a basic set of kinematic parameters (the
Baskip) and determining whether speed was an important factor whilst simultaneously testing
the Baskip. Naturally, there is much more room for improvement in the field than the
suggestions noted below: this study provides but a framework which can be expanded and
improved.
4.2 Baskip
The following set of parameters was used: {Grasp aperture, Movement time, Peak
velocity, Time to peak velocity, X coordinate, Y coordinate}. These parameters were the ones
featured in most of the literature. All of these parameters can be easily calculated using just two
markers which record the X and Y coordinates of the thumb and the index finger. In my
experiment, all of the Baskip parameters were useful in determining the differences between
two or more conditions (see section 3.3) and therefore the final Baskip will remain unchanged.
For some experiments, other parameters might be useful (such as reaction time or Z coordinate)
and some might be irrelevant (such as time to peak velocity) but it is likely that the Baskip
contains the parameters necessary for most of the research in this field.
4.3 Speed
The results (see table 3.1 and 3.3) clearly indicate that speed has a large influence on the
motion of the hand. The hand stays closer to the centre line during the first part of faster
movements and, after that, the faster movements sway more to the right than the slower
movements (see figures 3.1 and 3.3a/b). A possible explanation for this is that the participant is
more focussed on getting to the target as quickly as possible than on avoiding any possible
obstacles, which in a real-life situation could be useful when accidentally dropping an object.
Apart from these differences in trajectories, differences in peak grasp aperture were also
found for the bottom-right conditions (see section 3.2). I suspect this is because, in real-world
situations, the participant tries to stay away from potential obstacles as far as possible until
these obstacles are identified to be relatively harmless.
Future researchers in obstacle avoidance kinematics should use these findings when
interpreting the results of their experiments. For example, when research involves a flanker
positioned halfway through the movement, to the right of the vertical centre line, a normal
movement is preferred over a faster one.
4.4 Spatial Parameters
Recall that a lot of studies did not treat the spatial parameters as continuous parameters
but as discrete values such as “X @ 100mm”. Using the method described in sections 1.3 and
3.1 and figure 3.2, this study expands upon a method for the X, Y and Z coordinates to be
treated as continuous parameters. The main advantage of this is that it removes the subjective
component during data analysis. However, should researchers decide they only want to know
the differences at certain points, any of the values for X, Y & Z at A% of the movement (where
A is a real number between 0 and 100) can still be easily calculated. It should be noted that by
treating the X, Y and Z coordinates as discrete values at certain moments during the prehension
movements it is impossible to create a table which shows the differences between two
conditions as completely as tables 3.1 and 3.2.
4.5 Location
The Tipper Model predicted that the closer flankers are to trajectory of the control
movement, the bigger the influence would be on the trajectory of their respective prehension
movements. The results of the experiment neatly coincide with this prediction. Flankers which
were placed over 20 centimetres from the control trajectory did not significantly change the
movement.
The bottom-right flanker, which was placed rather close to the control trajectory, had a
rather large influence on the movement of the hand (as can be clearly seen in figures 3.3a/b).
The top-right flanker only influenced the movement during the normal speed condition: it
stayed significantly closer to the centre line than the control trajectory. However, during the fast
speed condition this effect was not observed. This lack of difference is most likely explained by
noticing that during the fast speed conditions the hand stays closer to the centre line to avoid
the non-target, thereby negating the effects the top-right flanker might have.
5. Conclusion
In conclusion, this study provides a framework on which future research in the field of
obstacle avoidance kinematics can be based. It gives a set of kinematic parameters (see section
1.1) and explains how these can be used for further research (sections 3.2 and 4.2), with special
regard to the spatial parameters (sections 1.3, 3.1 and 4.4). It also emphasises the effect of
speed on prehension movements (sections 1.2, 4.3 and chapter 3). Finally, the conducted
experiment gives support for two claims. 1: A non-target ipsilateral of a target influences the
motion of the human hand and more importantly 2: A movement at a normal pace is different
from a movement at a fast pace.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
Biegstraaten, M., Smeets, J.B.J., Brenner, E. (2003). The influence of obstacles on the speed
of grasping. Exp Brain Res,149, 530–534.
Bootsma, R.J., Marteniuk, R.G., MacKenzie, C.L., Zaal, F.T.J.M. (1994). The speedaccuracy trade-off in manual prehension: effects of movement amplitude, object size and object
width on kinematic characteristics. Exp Brain Res 98: 535-541.
Castiello, U. (1996). Grasping a fruit: Selection for action. Journal of Experimental
Psychology: Human Perception and Performance, 22, 582±603.
Chapman, C.S., Goodale, M.A. (2008). Missing in action: the effect of obstacle position and
size on avoidance while reaching. Exp Brain Res 191: 83-97.
Chapman, C.S., Goodale, M.A. (2010). Obstacle Avoidance During Online Corrections.
Journal of Vision 10:17, 1-14.
Chieffi, S., Gentilucci, M. (1993). Coordination between the transport and the grasp
components during prehension movements. Exp Brain Res 94: 471-477.
Cohen, J. (1992). Statistical Power Analysis. Current Directions in Psychological Science
Vol. 1, No.3: 98-101.
Dean, J., Brüwer, B. (1994). Control of human arm movements in two dimensions: paths
and joint control in avoiding simple linear obstacles. Exp Brain Res 97: 497-514.
Desmurget, M., Prablanc, C., Arzi, M., Rossetti, Y., Paulignan, Y., Urquizarm C. (1996).
Integrated control of hand transport and orientation during prehension movements. Exp Brain Res
110: 265-278.
Frak, V., Paulignan, Y., Jeannerod, M., Michel, F., Cohen, H. (2005). Prehension
movements in a patient (AC) with posterior parietal cortex damage and posterior callosal section.
Brain and Cognition 60: 43-48.
Gentilucci, M., Toni, I., Chieffi, S., Pavesi, G. (1993). The role of proprioception in the
control of prehension movements: a kinematic study in a peripherally deafferented patient and in
normal subject. Exp Brain Res 99: 483-500
Geronimi, M., Gorce, P. (2007). Aging effect on movement of prehension with obstacle.
Journal of Biomechanic 40: S2.
Goodale, M.A., Chapman, C.S. (2010). Seeing all the obstacles in your way: the effect of
visual feedback and visual feedback schedule on obstacle avoidance while reaching. Exp Brain Res
202: 363-375.
Haggard, P., Wing, A. (1995). Coordinated responses following mechanical perturbation of
the arm during prehension. Exp Brain Res 102: 483-494.
Jax, S.A., Rosenbaum, D.A., Vaughan, J. (2007) Extending Fitts’ Law to manual obstacle
avoidance. Exp Brain Res 180: 775-779.
Kritikos, A., Bennet, K.M.B., Dunai, J., Castiello, U. (2000). Interference from Distractors
in Reach-to-grasp Movements. The quarterly journal of experimental psychology, 53A (1): 131-151.
Loftus, A., Servos, P., Goodale, M.A., Mendarozqueta, N., Mon-Williams, M. (2004).
When two eyes are better than one in prehension: monocular viewing and end-point variance. Exp
Brain Res 158: 317-327
Mohagheghi, A.A., Anson, J.G., (2002). Amplitude and target diameter in motor
programming of discrete, rapid aimed movements: Fitts and Peterson (1964) and Klapp (1975)
revisited. Acta Psychologica 109: 113-136.
Mon-Williams, M., Tresilian, J.R., Coppard, V.L., Carson, R.G. (2001). The effect of
obstacle position on reach-to-grasp movements. Exp Brain Res 137: 497-501.
Rice, N.J., McIntosh, R.D., Schindler, I., Mon-Williams, M., Démonet, J.F., Miler, A.D.
(2006) Intact automatic avoidance of obstacles in patients with visual form agnosia. Exp Brain Res
174: 176-188.
21.
Tipper, S.P., Howard, L.A., Jackson, S.R. (1997). Selective Reaching to Grasp: Evidence
for Distractor Interference Effects. Visual Cognition 4:1: 1-38.
22.
Tresilian, J.R. (1998). Attention or action or obstruction of movement? A kinematic
analysis of avoidance behavior prehension. Exp Brain Res 120: 352-368.
23.
Van de Kamp, C., Bongers, R.M., Zaal, F.T.J.M. (2009). Effects of Changing Object Size
During Prehension. Journal of Motor Behavior, Vol. 41, No,5.