Band Selection using Sparse Nonnegative Matrix Factorization with
advertisement

Band Selection using Sparse Nonnegative Matrix Factorization
with the Thresholded Earth’s Mover Distance for Hyperspectral
Imagery Classification
Weiwei Sun, a Weiyue Li,b Jialin Li, a Yenming Mark Lai c
a
Ningbo University, College of Architectural Engineering, Civil Engineering and Environment, 818
Fenghua Rd, Ningbo, Zhejiang, China, 315211
b
Shanghai Normal University, Institute of Urban Development, 100 Guilin Rd, Shanghai, China,
200234
c
University of Texas at Austin, The Institute for Computational Engineering and Sciences (ICES),
Austin, USA, 78712
Abstract. A sparse nonnegative matrix factorization method with the thresholded ground distance
(SNMF-TEMD) is proposed to solve the band selection problem in hyperspectral imagery (HSI)
classification. The SNMF-TEMD assumes that band vectors are sampled from a union of
low-dimensional subspaces and approximates a HSI data matrix with the product of a basis matrix
constructed from subspaces and a sparse coefficient matrix. The SNMF-TEMD utilizes the TEMD
metric to better measures approximation errors during the optimization of HSI data factorization. The
TEMD metric makes up the theoretical drawbacks in the Euclidean distance (ED) and
Kullback-Leibler divergence (KLD) metrics when measuring the approximation errors in HSI
datasets. The SNMF-TEMD is solved by the combination of min-cost-flow algorithm and
multiplicative update rules. The band cluster assignments are found according to positions of
largest entries in columns of the coefficient matrix and the desired band subset constitutes with the
bands closest to their cluster centers. Three groups of experiments on two HSI datasets are performed
to explore the performance of SNMF-TEMD. Four popular band selection methods are used to make
comparisons: affinity propagation (AP), maximum-variance principal component analysis (MVPCA),
SNMF with ED metric (SNMF-ED) and SNMF with KLD metric (SNMF-KLD). Experimental results
show that SNMF-TEMD outperforms all four methods in classification accuracy and its computational
speed is slower than SNMF-ED and SNMF-KLD. SNMF-TEMD is a better choice for band selection
among all five methods because of its overwhelming advantage in classification and the popular speed
remedy scheme from parallel computing and high-performance computers.
Keywords: band selection, sparse nonnegative matrix factorization, thresholded earth’s mover
distance, hyperspectral imagery, classification.
Corresponding Author: Weiwei Sun, Ningbo University, College of Architectural Engineering, Civil
Engineering and Environment, 50# Postbox, 818 Fenghua Rd, Ningbo, Zhejiang, 315211;
Tel:+0086-18258796120; Email: nbsww@outlook.com
1. Introduction
From the birth of image spectrometer, Hyperspectral imagery (HSI) has attracted much interest
from researchers in the remote sensing field. Hyperspectral imaging collects tens to hundreds
bands that reflect the radiant reflectance of ground objects from visible to near-infrared spectrum,
and could be used to recognize subtle differences in spectral responses among different ground
objects using the classification implementation (Du and Zhang 2014a). The classification result
greatly benefit many realistic applications, including land cover mapping (Tong et al. 2013), target
detection (Wang et al. 2013; Du and Zhang 2014b), ocean monitoring (Keith et al. 2014) and mine
exploration (Murphy and Monteiro 2013) and so on. Unfortunately, numerous bands and strong
intra-band correlations render that the classification process is trapped into the “curse of
dimensionality” (Melgani and Bruzzone 2004). Accordingly, making dimensionality reduction is
an effective scheme to solve the above problem.
Dimensionality reduction can be grouped into two main classes, feature extraction and band
selection (also called feature selection) (Sun et al. 2014). Band selection selects an optimal band
subset from the original band set of the HSI dataset while feature extraction preserves important
spectral features through mathematical transformations. In our paper, we focus our study of
dimensionality reduction on band selection.
Pervious schemes in band selection can be roughly divided into two categories: the maximum
information or minimum correlation (MIMC) scheme and the maximum inter-class separability
(MIS) scheme. MIMC selects an optimal band subset in which each single-band image has the
maximum information or minimum correlation with other bands. The MIMC scheme typically
implements three main criteria including the entropy criterion, the intra-band correlation criterion,
and the cluster criterion. The entropy criterion algorithm collects an optimal band subset by
maximizing the overall amount of information using entropy-like measurements (Arzuaga-Cruz et
al. 2003). The intra-band correlation criterion algorithms select an optimal band subset having
minimum intra-band correlations, such as the mutual information based algorithm and the
constrained band selection algorithm based on constrained energy minimization (CBS-CEM)
(Chang and Wang 2006). The cluster criterion algorithm selects a representative band from each
band cluster using certain clustering algorithms, including the hierarchical clustering algorithm
(Guo et al. 2006) and the affinity propagation (AP) algorithm (Qian et al. 2009).
In contrast, the MIS scheme maximizes the separability of different ground objects in the image
scene to select an optimal band subset. The MIS scheme is typically implemented using one of the
following criteria: the distance measurement criterion, the feature transformation criterion, and the
realistic application criterion. The distance measurement criterion algorithm maximizes the
inter-class differences using a distance-like measurement such as the spectral information
divergence (SID) (Ball et al. 2007) and Mahalanobis distance (Keshava 2004). The feature
transformation criterion algorithm selects an optimal band subset by analyzing the inter-class
separability of ground objects in a low-dimensional feature space constructed from feature
transformations, such as the independent component analysis algorithm (Du et al. 2003) and the
complex network algorithm (Xia et al. 2013). The realistic application criterion algorithm chooses
an optimal band subset through optimizing the defined objective function suitable for realistic
applications, such as the high-order movement algorithm (Du 2003) and the supervised algorithm
using the known class spectral signatures algorithm (Yang et al. 2011a).
In recent years, sparse nonnegative matrix factorization (SNMF) has drawn much attention
from researchers in the remote sensing community. SNMF approximates a two-dimensional HSI
data matrix using the product of a low-rank basis matrix and a sparse coefficient matrix with the
non-negativity constraint in both matrices. Current study of SNMF in the HSI dataset mainly
concentrates on hyperspectral unmixing (Jia and Qian 2009; Yang et al. 2011b; Zhu et al. 2014)
and feature extraction (Wen et al. 2013; Wen et al. 2014; Xiao and Bourennane 2014). Different
from the above, Li considered the clustering structures of SNFM and utilized SNMF to select an
optimal band subset from an HSI dataset through band clustering (Li and Qian 2011). After that,
Shi replaced the Euclidean distance (ED) in the object function of SNMF with the
Kullback-Leibler divergence (KLD) measure to ameliorate the band selection result (Shi et al.
2014). The above achievements greatly promote the applications of SNMF into band selection on
HSI datasets.
However, one significant problem was not carefully solved when implementing SNMF into
band selection of HSI datasets. The problem is that neither the ED nor KLD metric is an
appropriate choice to measure the dissimilarity between the original HSI data matrix and its
approximation. Both ED and KLD metrics have good mathematical properties such as the
bounded reconstruction error for the Frobenius norm (Hazan and Shashua 2007). However, they
always bring about inaccurate factorization results because of their contradictions with the nature
of noises in realistic HSI datasets (Donoho and Stodden 2003). For example, the ED metric
optimizes the object function in SNMF under the assumption that noises in the HSI datasets
follows the Gaussian distributions (e.g., independent identically distributed, i.i.d.). However, the
realistic HSI data points in high-dimensional feature space did not support the Gaussian
distribution assumption. Therefore, an alternative type of distance measurement is preferred to
solve the problem.
In the paper, we propose the SNMF algorithm with the thresholded earth’s mover distance
(TEMD), called SNMF-TEMD, for the purpose of solving the band selection problem in HSI
classification. Our goal is to alleviate the approximate error using the TEMD metric and promote
the performance of SNMF in selecting an optimal band subset from the HSI dataset. Although
Sandler tried to combine EMD with NMF and made some progress in image segmentation
(Sandler and Lindenbaum 2011), our study differs from that in two aspects. The first is that our
study stands on the SNMF rather than NMF and the aimed application of our study is band
selection of the HSI dataset. The second is that we implement the TEMD metric to measure the
approximation error and greatly reduce the computational speeds of EMD. Our SNMF-TEMD
method favors two main innovations. The first is that we utilize TEMD metric to improve the
approximation in the object function of SNMF. The TEMD regards the approximation error as a
complex local deformation of the original HSI dataset and could better quantify the error than both
ED and KLD metrics. The second is that our SNMF-TEMD method outperforms better in HSI
classification and takes lower computational time.
The rest of our paper is in the following. Section 2 briefly reviews the classical sparse
nonnegative matrix factorization. Section 3 presents our SNMF-TEMD method for selecting an
optimal band subset. Section 4 analyzes the performance of SNMF-TEMD in band selection using
two widely used HSI datasets. Section 5 states conclusions and outlines our future work.
2. A Brief Review of SNMF
In this section, we give a brief description of the classical SNMF method. SNMF decomposes the
original data matrix into the product of a set of bases (i.e., the basis matrix) and encodings (i.e.,
the coefficient matrix) where the basis is nonnegative and the encodings are both negative and
sparse. The nonnegative constraints in bases and encodings brings about the parts-based feature of
SNMF because they allows only additive combinations among different bases. Consider a real
data set X [ x1 , x 2 , , x N ] R
represents
a
feature,
D N
where each column represents a data sample and each row
SNMF
W [w1 , , w l , w k ] R Dk and
original matrix as
attempts
to
find
two
H [h1 , , hi , h N ] R k N
nonnegative
matrices
to approximate the
X WH , where W 0 , H 0 and k is the rank of W and H
with k min{m, n} . The placement of sparse constraint in columns of W , rows or columns
of H is to enforce the sparseness of the founded decompositions. A distance metric is always used
to measure the approximation error between the data matrices X and the product matrix WH , and
the SNM is solved by optimizing the following problem:
arg min Fk ( W, H ) dist ( X WH ),
W ,H
s.t . W 0, H 0, one of the following sparseness conditions :
1) : hi
0
s1 , s1 0, 1 i N ;
2) : H ( j ,:) 0 s2 , s2 0, 1 j k ;
3) : w l
0
(1)
s3 , s3 0, 1 l k ;
and one of the following scale conditions in W or H :
1) : H
2) : W
c1 , c1 0, f [0,1, 2];
f
f
c2 , c2 0, f [0,1, 2].
where min Fk ( W, H) is the approximate error term, and it quantifies the quality of approximation.
W,H
Two common choices in the function dist using the ED and KLD metrics constitute the Frobenius
norm term and the KLD term respectively. The sparseness conditions 1) and 2) are the L0 norm
constraints in columns and rows of the coefficient matrix H respectively; the sparseness condition
3) is the L0 norm constraint in columns of the basis matrix W ; and the norm operation
f
in the
scale conditions can be the L0, L1 or L2 norm constraints in the basis matrix W and the coefficient
matrix H respectively. The scale constraint in W or H is to avoid the unsteady solution in problem
(1) since over-large values in W or H renders the optimization result is unstable even unreasonable.
Different choices in sparseness conditions has their separate practical explanations. The sparseness
constraint in hi explains that each data point can be approximated by a linear combination of a
limited number of basis vectors in W . The sparseness constraint in the row vector H ( j ,:) of
H means that a limited number of data points in X is used to infer each basis vector. The
explanation of sparseness constraint in w l is that each basis affects only a small part of each
feature in X .
Different combinations of the sparseness and scale conditions result in divergent object
functions of problem (1). Hoyer (2002) constructed the object function with the Frobenius norm
term and the L1 norm of H in the scale condition 1). The proposed object function of nonnegative
sparse coding (NSC) was regarded as the paragon work of SNMF. After that, he relaxed the
sparseness conditions by using means of nonlinear projection at each iteration based on the
sparseness measures from the relationship between the L1 and L2 norm. The sparseness measure
quantifies how much energy of a feature vector is packed into only a few components. Hoyer then
presented an object function named NMF with sparseness constraints (NMFSC) by combing the
Frobenius norm term with the sparseness measures (Hoyer 2004). Some other objective functions
are also suggested, such as the object function using the combination of the Frobenius norm term
and the L2 norm of H (Gao and Church 2005) and the combination of the Frobenius norm term
and the L0 norm of W or H (Peharz and Pernkopf 2012).
Meanwhile, optimization algorithms were also proposed to solve the optimization problem (1)
to obtain the desired basis matrix W and the coefficient matrix H . The nonlinear least angle
regression and selection (NLARS) method (Morup et al. 2008) and the stable and efficient NSC
algorithm (Li and Zhang 2009) were proposed to optimize the NSC object function by Hoyer. The
alternating non-negativity constrained least squares (ANLS) method (Kim and Park 2007) by Kim
was used to optimize its object function derived from problem (1). The projected gradient method,
the Nesterov's optimal gradient method (Guan et al. 2012) and the fast gradient descent method
(Guan et al. 2011) were also introduced to resolve the optimization problem of SNMF. More
detailed analysis and discussions in the objective functions and solvers of SNMF can be found in
literatures by Wang (2013), Peharz (2012) and Cai (2011) and so on.
3. Band Selection using SNMF-TEMD
In this section, the band selection method using SNMF-TEMD is described. Section 3.1 presents
sparse representations of HSI band vectors from the aspect of SNMF. Section 3.2 introduces the
principle of EMD metric and utilizes the TEMD metric to improve the SNMF. Section 3.3
describes the band selection method with the optimization result of SNMF-TEMD. And section
3.4 summarizes the process of band selection using SNMF-TEMD.
3.1 Sparse Representations of HSI Band Vectors
Assume that a collection of HSI band vectors X xi i 1 R
N
D N
is lying in a union of linear
subspaces Cl l 1 with dimensions d l l 1 , where D is the dimensionality of high-dimensional
k
k
space that is equal to the number of pixels in the image scene, and N is the number of bands (i.e.,
the number of band vectors) with N
D . We assume each band yi R D1 lies in exactly one of
the k linear spaces Cl , and each band can be sparsely represented by a basis matrix constructed
from all k linear subspace, weighted by a sparse coefficient vector. Moreover, the position and
largest value of nonzero entries in the sparse coefficient vector coincides with its underlying
subspace that the band was sampled from.
Considering the corruption from noises in the realistic HSI dataset, each band vector xi X
could be sparsely represented with the basis matrix W as follows:
k
xi j w j Whi ei
(2)
j 1
where hi [1 , , j , , k ]
T
is the coefficient vector, j xi , w j w j xi 0 ,
T
W [w1 , w 2 , , w k ] R Dk is the basis matrix with W 0 , and e i is the error term. The
nonnegative constraint in W results from the nonnegativity of the spectral reflectance values in X .
The nonnegative constraint in j is to avoid negative reconstruction weights from the basis
matrix W . The coefficient vector hi [1 , , j , , k ] is s sparse with s k , that is, the
T
number of nonzero entries in hi is far smaller than k. The positions and values of nonzero entries
in hi reflect the weights from the basis vector from W in reconstructing the band x i . Furthermore,
when we stacking all the bands in columns, equation (2) becomes the matrix form in (3)
X WH E s. t. W 0, H 0, and hi 0 k ,1 i N
H [h1 , h 2 , , hi , h N ] R k N is the coefficient matrix, and the constraint
where
hi
0
(3)
k means that each column vector hi is sparse and the number of its nonzero entries is far
smaller than the dimension k. Considering the nonconvex property of L0 norm in hi , the L1 norm
constraint is adopted to make constraint on columns of the H factor since the L1 norm is proven to
obtain the same solution with the L0 norm under certain conditions (Candes et al. 2006; Ramirez
et al. 2013). Too large values in w i would render that the equation (3) has unstable and even trivial
results and the L2 norm (i.e., the Frobenius norm) constraint is accordingly imposed in the basis
matrix W . Therefore, equation (3) can be rewritten as the following optimization problem (4)
(Kim and Park 2007):
min f ( W, H) X WH
W,H
Where
2
F
+ W
F
2
2
F
N
hi
i 1
2
1
s.t . W 0, H 0
(4)
is the Frobenius norm, the parameter controls the size of entries in W with 0 ,
and the parameter controls the sparseness in columns of H with 0 . The basis matrix W and
the sparse coefficient matrix H can be obtained through optimizing the problem (4). However, the
ED metric in the Frobenius error term of (4) cannot perfectly represent the approximate error
between the data matrix X and its approximation WH because the Gaussian distribution
assumption behind the Euclidean measure contradicts with the reality of the HSI dataset.
Therefore, we utilize the EMD metric (shown in section 3.2) to take place the ED metric, aiming
to improve the objection function in (4) to achieve better optimization results.
3.2 The EMD Metric using Thresholded Ground Distance
The EMD metric is a cross-bin distance that mainly resolves the histogram or image matching
problems (Rubner and Tomasi 2000). The metric was widely used in many applications of
computer vision including image retrieval (Kundu et al. 2012), visual tracking (Karavasilis et al.
2011), and hand gesture recognition (Ren et al. 2011) and so on. The EMD metric, also called the
Monge-Kantarovich problem, aims to minimize the cost that must be performed when
transforming from one feature distribution (i.e., the histogram) into the other. Assume a
high-dimensional real dataset as X [x1x 2 , , x N ] R
D N
, where each column xm represents
the source histogram that corresponds to spectral responses of pixels in the m-th band, and let the
column vector xm X be the target normalized histogram. We utilize the normalized histogram
rather than the unnormalized to guarantee that the total reconstruction weights on the same band
from all the basis vectors sums to 1. The EMD distance between two histograms xm and xm is
formulated as a linear programming problem whose goal is to minimize the total cost in
transforming the source xm to the target xm as follows:
EMD(x m , x m ) f m (i, j )d (i, j ), s.t . f m (i, j ) 0,
i, j
i
where
(5)
f m (i, j ) = X(i,m), f m (i, j ) = X( j,m), f m (i, j ) 1
j
i, j
f m (i, j ) and d (i, j ) are the flow amount and flow cost between the i-th pixel of the
source histogram xˆ m and the j-th pixel of the target histogram xm respectively, and the flow cost
measures with the L1 ground distance. The constraint
f
m
(i, j ) 1 is because of the
i, j
normalized histograms of
xm and xm . Furthermore, the EMD distance between two
matrices X and X is the summation of EMD distances between each column in X and the
corresponding column in X and can be illustrated as follows (Sandler and Lindenbaum 2011):
N
EMD( X, X) ( x m , x m )
(6)
m 1
3
The computational complexity of EMD distance between X and X scales up to O( ND log D) ,
where N and D are the dimensionality and the number of band vectors in the HSI data matrix
respectively. The high computational complexity of EMD render it unfeasible in realistic
applications. Therefore, we utilize the thresholded earth’s mover distance (TEMD) metric (Pele
and Werman 2009) to reduce the computational complexity of the EMD in (5). The TEMD metric
considers noise distributions of spectral responses of HSI data points, and assigns different outliers
with the same large ground distance. The thresholded ground distance in TEMD metric is
represented as dT (i, j ) min(d (i, j ), T ) with the threshold T
0 . The TEMD metric replaces
the flow cost d (i, j ) in (5) with the thresholded distance dT (i, j ) . It reduces the computational
complexity of the original EMD metric between matrices by an order of magnitude. The TEMD
can be easily solved with the min-cost-flow algorithm (Ahuja et al. 1993; Goldberg 1997) and the
approximation error between the original HSI data matrix and its approximation can be measured
using the TEMD metric.
3.3 Band Selection using the Sparse Coefficient Matrix
The objective function in (4) is not convex with respect to both variables W and H , and
therefore multiplicative update rules are usually implemented to achieve a local optima. The
problem (4) can be iteratively optimized by consecutively fixing either W or H , and the
approximate error monotonically decreases as iterations increase. The problem can be
decomposed as the following two optimization subproblems:
H arg min W H X 2 ,s.t . H 0
t 1
1 F
t
H
2
Wt arg min Ht WT X2 ,s.t . W 0
F
W
(7)
Ht T
Wt 1
XT
X
,X
;H =
,X
where Wt 1
, Ht and Wt are the
e 1 01 N t I 2 0
k D
1k
k
optimization result in the t-th iteration .We then replace the Frobenius norm with the TEMD
metric, and problems (7) is transformed into (8):
H t arg min TEMD( X1 , Wt 1H ),s.t . H 0
H
TEMD( X 2 , H t WT ),s.t . W 0
Wt arg min
W
N
D
where TEMD(, ) f m (i, j ) dT (i, j ), s.t . f m (i, j ) 0,
(8)
m 1 i , j 1
dT (i, j ) min( d (i, j ), T ), f m (i, j ) 1
i, j
where the variables without notations are the same with the aforementioned. The basis
matrix W0 and the coefficient matrix H 0 are initialized with random matrices. At the t-th iteration,
the coefficient matrix Ht is optimized using the TEMD metric with the basis matrix Wt 1 fixed.
Analogously, the basis matrix Wt is updated using the TEMD metric and the optimized
coefficient matrix Ht . The two matrices in (8) are iteratively updated using the min-cost-flow
algorithm
and
the
update
terminates
until
the
absolute
error
EMD( X1 , Wt 1H )-EMD( X 2 , H t WT ) is smaller than a certain positive threshold . The
optimized basis matrix W and the optimized sparse coefficient matrix H is finally found.
With respect to each band x i , nonzero entries in the column vector hi show the weights from all
basis vectors of W in reconstructing the band x i . Specifically, the position of the largest entry
in hi explains that the band x i belongs to the subspace whose corresponding basis has the largest
weights in hi . All band vectors in X are accordingly segmented into k clusters and each band
vector x i has the cluster number Ci arg max(hi ) . Two schemes including random sampling and
the distance metrics can be implemented for choosing a representative band from each cluster. We
select the bands that are closest to its cluster centers as the selected band and the ED metric is
utilized to measure the distance between each band vector and its cluster centering. The selected k
bands constitutes the desired band subset using our SNMF-TEMD algorithm.
3.4 The Implementation of SNMF-TEMD
Considering the drawbacks of the ED metric, our SNMF-TEMD method improves SNMF with
the TEMD metric and ameliorates the approximate error during the decomposition process of
SNMF. Our SNMF-TEMD regards that each band is sparsely represented with the basis
matrix W constructed from k linear subspaces and factorizes the HSI data matrix with a
nonnegative basis matrix and a sparse nonnegative coefficient matrix. All the bands are then
segmented into k clusters through the rule that the largest nonzero entries in columns of the sparse
coefficient matrix coincides with the clusters that the corresponding band should belong to. The
bands closest to their clustering centers are selected as elements of the band subset using the
SNMF-TEMD. The process of band selection using SNMF-TEMD is as follows:
1) The HSI data cube is normalized and transformed into two dimensional real data matrix X .
2) The band selection is modelled as the decomposition of X into the basis matrix W and the
sparse coefficient matrix H by solving the optimization problem in (4).
3) The optimization problem is rewritten as the alternative problem (8) using the TEMD metric.
4) The optimization problem (8) is solved using the multiplicative update rules and the
min-cost-flow algorithm. The desired basis matrix W and the desired sparse coefficient
matrix H are then achieved.
5) The positions of the largest entry in columns of H determine the cluster alignments for each
band and the band vectors are segmented into k clusters.
6) The bands nearest to their clustering centers constitute the SNMF-TEMD band subset.
4. Experimental results and Analysis
In this section, three groups of experiments on two widely used HSI datasets including Indian
Pines and Urban datasets are designed to testify our SNMF-TEMD algorithm when selecting an
optimal band subset. Section 4.1 describes the information of Indian Pines and Urban HSI datasets.
Section 4.2 lists and analyzes experimental results from the three groups of experiments.
4.1 Descriptions of Two HSI datasets
The Indian Pines dataset was taken from Multispectral Image Data Analysis System group at
Purdue University (https://engineering.purdue.edu/~biehl/MultiSpec/aviris_documentation.html).
The dataset was acquired by NASA on June 12, 1992 using the AVIRIS sensor from JPL. The
dataset has 20 m spatial resolutions and 10 nm spectral resolutions within a spectrum range of
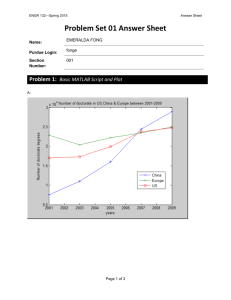
200-2400 nm. A subset of the image scene of size 145×145 pixels depicted in Figure 1 is used in
our experiment and covers an area of 6 miles west of West Lafayette, Indiana. The dataset was
preprocessed with radiometric corrections and bad band removal, and the final 200 bands left with
calibrated data values proportional to radiances. Sixteen classes of ground objects exist in the
image scene, and the ground truth for both training and testing samples for each class is listed in
Table 1.
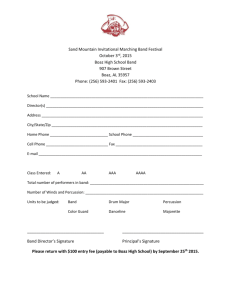
The Urban dataset was downloaded from the website of US Army Geospatial Center
(www.tec.army.mil/hypercube). The dataset was acquired by a HYDICE sensor with 10 nm
spectral resolution and 2 m spatial resolutions. The low SNR band sets [1-4, 76, 87, 101-111,
136-153, 198-210] were eliminated from the initial 210 bands, leaving the final 162 bands. Figure
2 shows a small image subset of size 307×307 pixels selected from the larger image. The small
dataset covers an area at Copperas Cove near Fort Hood, TX and has twenty-two classes of
ground objects. Table 2 shows the ground truth information for training and testing samples in
each class.
Figure 1. The image of Indian Pines dataset
Figure 2. The image of Urban dataset
Table 1 The ground truth of training and testing samples in each class for the Indian Pines dataset
Class
Sample
Class
Sample
Label
Name
Train
Test
Label
Name
Train
Test
1
Alfalfa
9
37
9
Oats
4
16
2
Corn-notill
286
1142
10
Soybeans-notill
194
778
3
Corn-min
166
664
11
Soybeans-min
491
1964
4
Corn
47
190
12
Soybeans-clean
119
474
5
Grass/Pasture
97
386
13
Wheat
41
164
6
Grass/Trees
146
584
14
Woods
253
1012
7
Grass/pasture-mowed
6
22
15
Bldg-Grass-Tree Drives
77
309
8
Hay-windowed
96
382
16
Stone-Steel towers
19
74
2051
8198
Total
Table 2 The ground truth of training and testing samples in each class for the Urban dataset
Class
Sample
Class
Sample
Label
Name
Train
Test
Label
Name
Train
Test
1
AsphaltDrk
45
40
12
Roof02BGvl
17
22
2
AsphaltLgt
26
32
13
Roof03LgtGray
12
23
3
Concrete01
64
60
14
Roof04DrkBrn
39
45
4
VegPasture
116
120
15
Roof05AChurch
38
47
5
VegGrass
65
62
16
Roof06School
28
36
6
VegTrees01
123
140
17
Roof07Bright
35
37
7
Soil01
52
61
18
Roof08BlueGrn
21
24
8
Soil02
24
29
19
TennisCrt
47
49
9
Soil03Drk
27
32
20
ShadedVeg
17
23
10
Roof01Wal
57
61
21
ShadedPav
30
34
11
Roof02A
44
47
22
VegTrees01
126
135
1053
1159
Total
4.2 Experimental Results
Three groups of experiments are carried to test the performance of our SNMF-TEMD method in
band selection for the purpose of classification. Four widely used methods are used to make
holistic comparisons including affinity propagation (AP) (Qian et al. 2009), maximum-variance
principal component analysis (MVPCA) (Chang et al. 1999), SNMF with ED metric (SNMF-ED)
(Li and Qian 2011) and SNMF with KLD metric (SNMF-KLD) (Shi et al. 2014). First, we
quantify the band selection performance of SNMF-TEMD and compare the results with those of
the other four methods. The experiment assesses the performance of the SNMF-EMD in band
selection before classification. Second, we compare the classification accuracies of SNMF-TEMD
against those of the other four methods. Two widely used classifiers are used in the experiment,
K-nearest neighbor (KNN) (Cover and Hart 1967) and Support Vector Machine (SVM) (Steinwart
and Christmann 2008) classifiers. The overall classification accuracy (OCA) and average
classification accuracy (ACA) is adopted to measure the classification accuracy of all five
methods. The KNN classifier uses the Euclidean distance, and the SVM classifier uses the radial
basis function (RBF) kernel function with the variance parameter and the penalization factor
obtained via cross-validation. Third, we compare the computational time of SNMF-TEMD against
other four band selection methods when varying the size of band subset k. The experiment
investigates the computational performance of SNMF-TEMD. The following experimental results
without specific notations are the average results of ten different and independent experiments.
1) Quantitative evaluation of SNMF-TEMD. The experiment evaluates the band selection
results obtained from SNMF-TEMD and other four methods using three quantitative measures
before classification. The average information entropy (AIE) measures the information amount in
the band subset. The average correlation coefficient (ACC) estimates the intra-band correlations
within the band subset. The average relative entropy (ARE) (also called average Kullback-Leibler
divergence, AKLD) evaluates the inter-separabilities of selected bands for classification. The
reason for using three above quantitative measures is because they measure the three essential
performance characteristic of optimal band subset that is to have high information amount, low
intra-band correlations and high inter-separabilities. The band number k in SNMF-TEMD is
manually estimated after cross-validation and is set as the dimensionality of band subset for all
five methods. The parameters k in Indian Pines and Urban datasets are 15 and 19 respectively. In
the SNMF-ED and SNFM-EMD methods, the parameter β that controls the entry size of
dictionary matrix and the parameter η that determines the sparseness of coefficient matrix are
estimated using cross-validation and the optimal β and η having the best result are selected. In the
SNMF-KLD method, the parameter λ controls the balance between the sparsity of coefficient
matrix and the approximation error. For the Indian Pines dataset, the β and η in SNMF-ED and
SNMF-TEMD in Indian Pines dataset are chosen as 3.5 and 0.04 respectively, and the λ in
SNMF-KLD is 0.03. For the Urban dataset, the β and η in SNMF-ED and SNMF-TEMD in Indian
Pines dataset are chosen as 4.0 and 0.02 respectively, and the λ in SNMF-KLD is 0.02. The
thresholds T in TEMD of Indian Pines and Urban datasets are set as 20 and 15 via cross-validation.
The convergence thresholds in SNMF-TEMD of Indian Pines and Urban datasets are manually set
as 0.0003 and 0.0001 respectively.
Table 3 Contrast in quantitative measures of band subsets from all five methods on both datasets
Datasets
Quantitative Measures
AP
MVPCA
SNMF-ED
SNMF-KLD
SNMF-TEMD
Indian
AIE
9.5214
9.4289
10.0592
12.4762
14.6853
Pines
ACC
0.3079
0.7883
0.2908
0.2392
0.2047
(k=15)
ARE
32.2805
17.2572
31.0735
34.5842
36.7526
AIE
7.4287
7.0782
8.0031
8.7674
9.0258
ACC
0.6682
0.8976
0.6458
0.5946
0.5532
ARE
9.7286
0.6259
9.7873
10.6253
11.0248
Urban
(k=19)
Table 3 lists quantitative evaluation results of all five methods on Indian Pines and Urban
datasets. For the Indian Pines dataset, the SNMF-TEMD performs best among all the methods for
all three quantitative measures. The MVPCA performs worst in all three quantitative measures.
The SNMF-ED behaves better than MVPCA and AP whereas it is worse than SNMF-KLD in three
quantitative measures. The similar observations exist in the Urban dataset. The MVPCA
performance is the worst of all in the three quantitative measures. The SNMF-ED again behaves
worse than SNMF-KLD and SNMF-TEMD whereas it overpass AP and MVPCA in the three
quantitative measures. The advantage of SNMF-KLD over SNMF-ED explains the superiority of
KLD metric over ED metric in measuring the approximation error of the HSI datasets. The
SNMF-TEMD in the Urban dataset has the highest AIE and ARE and lowest ACC, and performs
better than SNMF-KLD and SNMF-ED. That means the EMD metric improves the approximation
measure of the HSI dataset than KLD and ED metrics and ameliorates the band selection result.
From above observations, the conclusions are in the following. The SNMF-TEMD has the best
performance in three quantative measures and is the best choice among all five methods in
selecting an optimal band subset. In contrast, the MVPCA perform worst in the quantitative
evaluations and is a bad choice for optimal band selection.
2) Classification performance of SNFM-EMD. This experiment tests the classification
performance of the SNMF-EMD by varying the number of bands k. We compare classification
accuracies using the OCA and ACA and compares with those of other four methods. For each
dataset, we repeatedly sub-sample the training samples and testing samples ten times to achieve
accurate classification accuracies. In the experiment, the size of band subset k in Indian Pines
dataset varies from 2 to 45 with a step interval of 2, and the k in Urban dataset varies between 2
and 50 with a step interval of 2. The neighbor size k1 in the KNN classifier is set as 3, and the
threshold of total distortion in the SVM classifier is set as 0.01. Using cross-validation, the β and η
in SNMF-ED and SNMF-TEMD in Indian Pines dataset are chosen as 3.2 and 0.05 respectively,
the β and η in Urban dataset are chosen as 3.8 and 0.02 respectively. The parameters λ of
SNMF-KLD method in Indian Pines and Urban datasets are 0.02 and 0.01 respectively. Other
parameters without notations in all the five methods are the same as their counterparts in the
previous experiment.
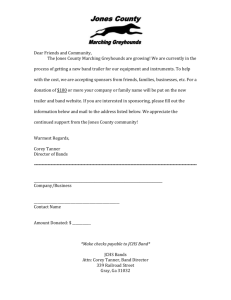
Figure 3 The OCA results of all the five methods on Indian Pines and Urban datasets
Figure 3 shows the OCA results of all the five methods on both HSI datasets, using the SVM
and KNN classifiers. We did not plot the ACA curves because of the similarity between the ACA
curves and the OCA curves. For each dataset and each classifier, the OCA curve is rising with the
increasing band number k. The curves changes slowly after a certain threshold of the band number
k and most curves become flat with slight fluctuations. The MVPCA curves have the lowest values
among all the methods, regardless of each classifier and each dataset. The SNMF-TEMD
outperforms best among all the methods, especially with a moderate or larger band number k. The
SNMF-KLD curves behave worse than SNMF-TEMD whereas the curves performs better than the
regular SNMF-ED curves. Moreover, we compare the OCA and ACA results of all the five
methods on both datasets, using a selected band number k. The selected band number k in Indian
Pines dataset is 15 and the k in Urban dataset is 19. Table 4 shows that the SNMF-TEMD has the
best classification accuracies for both datasets using different classifiers. The SNMF-KLD result
behaves better than SNMF-ED, AP and MVPCA in classification. The MVPCA has the worst
ACAs and OCAs among all the methods. We make the conclusions in the following. The
SNMF-TEMD preforms best among all five methods for HSI classification. SNMF-KLD behaves
better than SNMF-ED in band selection for classification and that coincides with the conclusion
by Shi (Shi et al. 2014). The MVPCA is the worst of all and that again support the conclusions in
the experiment 1). The SNMF-ED achieves similar or comparable classification accuracies to
those of AP.
Table 4 Classification accuracies of all methods using a selected band number on both datasets
Datasets
Indian
Classification Accuracy
AP
MVPCA
SNMF-ED
SNMF-KLD
SNMF-TEMD
ACA
0.6745
0.4978
0.7124
0.7328
0.7657
OCA
0.7566
0.6158
0.7492
0.7628
0.8216
ACA
0.6245
0.4492
0.6262
0.6521
0.6904
OCA
0.6570
0.5148
0.6660
0.6894
0.7219
ACA
0.8721
0.8481
0.8663
0.9280
0.9345
OCA
0.9387
0.9302
0.9451
0.9516
0.9697
ACA
0.8649
0.8276
0.8684
0.9148
0.9306
OCA
0.9342
0.9125
0.9276
0.9402
0.9495
SVM
Pines
(k=15)
KNN
SVM
Urban
(k=19)
KNN
3) Computational performance of SNFM-EMD. The experiment tests the computational speed
of SNMF-TEMD and the other four methods when varying the sizes of band subset k. For the
Indian pines dataset, k is set between 6 and 30 with a step interval of 6, and k in Urban dataset is
set between 10 and 50 with a step interval of 10. For the Indian Pines dataset, the β and η of
SNMF-ED and SNMF-TEMD are chosen as 3.5 and 0.01 respectively after cross-validation. The
β and η in Urban dataset are 3.0 and 0.03 respectively. The parameters λ of SNMF-KLD method in
Indian Pines and Urban datasets are 0.05 and 0.01 respectively. Other parameters in all the seven
methods are the same as their counterparts in the previous experiments.
We run the experiment on a Windows 7 computer with Inter i7-4700 Quad Core Processor and
16GB of RAM. Both SNMF-TEMD and other four algorithms are implemented in Matlab 2013b.
Table 5 shows the comparisons in the computations times of all the five methods on the Indian
Pines and Urban datasets. For each HSI dataset, computational times of all the methods increase
with the increasing k. The AP takes the longest computational times among all the methods. The
SNMF-TEMD has shorter computational times than AP but the computational speed is slower
than the other three methods. The SNMF-KLD takes longer computational times than SNMF-ED
and MVPCA, and the MVPCA has the shortest computational times among all the methods. The
longest computational times in AP is because it computes the entire similarity matrix of HSI band
vectors. The advantage in computational times of MVPCA results from the low computational
complexity in principal component analysis transformation of the HSI dataset. The longer
computational times in SNMF-TEMD than both SNMF-ED and SNMF-KLD is because of the
high computational complexity in TEMD metric although it has clear lower computational
complexity than the regular EMD. From above observations, the computational times in
increasing order of all the seven methods is as follows: MVPCA, SNMF-ED, SNMF-ED,
SNMF-KLD, SNMF-TEMD and AP.
Table 5 Computational times of five band selection methods using different k on two HSI datasets
Computational times (Seconds)
Size of band
Datasets
subset k
AP
MVPCA
SNMF-ED
SNMF-KLD
SNMF-TEMD
k=6
23.003
2.593
3.321
3.942
14.583
k=12
29.487
3.481
4.118
4.781
20.391
k=18
33.569
4.286
4.686
5.059
29.487
k=24
37.831
4.884
5.023
5.532
33.241
k=30
40.213
5.490
5.782
6.265
38.322
k=10
47.397
14.964
15.732
16.114
43.392
k=20
55.585
16.185
17.124
19.259
52.094
k=30
64.627
19.687
23.587
24.501
58.593
k=40
69.968
26.203
28.918
31.387
65.476
k=50
77.048
33.598
34.901
36.249
72.425
Indian
Pines
Urban
5. Conclusions and future work
In this paper, we propose a SNMF-TEMD method to solve the band selection problem in HSI data
classification. The SNMF-TEMD method models the band selection problem from the respective
of matrix factorization. Considering the theoretical drawbacks of ED and KLD metrics, the
SNMF-TEMD introduces the EMD metric to better measure the approximation errors during the
optimization process. Three groups of experiments are carried in order to testify the classification
performance of our method and the results are compared with those of four popular band selection
methods including AP, MVPCA, SNMF-ED and SNMF-KLD. The quantative evaluation results
show that SNMF-TEMD is the best choice in selecting an optimal band subset against other four
methods. The classification results shows that the SNMF-TEMD has the best performance in
classification accuracies, including both ACAs and OCAs. The computation results shows that the
SNMF-TEMD costs longer computational times than SNMF-KLD and SNMF-ED whereas it has
shorter computational times than the AP method. Therefore, comparing with SNMF-KLD and
SNMF-ED, the SNMF-TEMD is a better choice in band selection although the method fairly
compromises its computational speeds. The computational problem can be solved by using
parallel computing schemes and high-performance computers.
However, some problems have not been perfectly solved. First, too many parameters involved
in our SNMF-EMD method including the convergence threshold, the distance threshold T, the
balance parameters β and η. They all make effect on the performance of SNMF-TEMD in band
selection. Unfortunately, we have not found an automatic or semi-automatic estimation method
until now. The above parameters can only be manually determined via cross-validation or
experiences because of the complexity property of HSI data. Second, considering the paragraph
limits in the paper, we only make comparisons with four popular band selection methods on two
HSI datasets. The future work will comprises the comparisons between SNMF-TEMD with other
methods such as the linear constrained minimum variance-based band correlation constraint
(LCMV-BCC) (Chang and Wang 2006) method and the collaborative sparse model (CSM) method
(Du et al. 2012). Meanwhile, we will apply our SNMF-TEMD method into more realistic HSI
datasets to further testify and improve our proposed method.
Acknowledgement
This work was funded by National Nature Science Foundation of China (41401389, 41171073,
41471004), by Research Project of Zhejiang Educational Committee (Y201430436), by Ningbo
Natural Science Foundation (2014A610173), by Natural Science Foundation of Zhejiang
Province(Y5110321), by the Discipline Construction Project of Ningbo University
(ZX2014000400) and by the K. C. Wong Magna Fund in Ningbo University. The authors would
like to thank the editor and referees for their suggestions which improved the manuscript.
References
Ahuja RK, Magnanti TL, Orlin JB (1993) Network flows: theory, algorithms, and applications. Englwood Cliffs, New Jersey
Arzuaga-Cruz E, Jimenez-Rodriguez LO, Velez-Reyes M (2003) Unsupervised feature extraction and band subset selection
techniques based on relative entropy criteria for hyperspectral data analysis AeroSense 2003: 462-473
Ball JE, West T, Prasad S, Bruce LM (2007) Level set hyperspectral image segmentation using spectral information
divergence-based best band selection. Proceedings of 2007 IEEE International Geoscience and Remote Sensing
Symposium (IGARSS 2007) 4053-4056
Cai D, He X, Han J, Huang TS (2011) Graph regularized nonnegative matrix factorization for data representation IEEE
Transactions on Pattern Analysis and Machine Intelligence 33(8):1548-1560
Candes EJ, Romberg JK, Tao T (2006) Stable signal recovery from incomplete and inaccurate measurements Communications on
pure and applied mathematics 59(8):1207-1223
Chang C-I, Du Q, Sun T-L, Althouse ML (1999) A joint band prioritization and band-decorrelation approach to band selection for
hyperspectral image classification IEEE Transactions on Geoscience and Remote Sensing 37(6):2631-2641
Chang C-I, Wang S (2006) Constrained band selection for hyperspectral imagery IEEE Transactions on Geoscience and Remote
Sensing 44(6):1575-1585
Cover T, Hart P (1967) Nearest neighbor pattern classification IEEE Transactions on Information Theory 13(1):21-27
Donoho D, Stodden V (2004) When does non-negative matrix factorization give a correct decomposition into parts? Advances in
neural information processing systems 2004:1141-1148
Du B, Zhang L (2014a) Target detection based on a dynamic subspace Pattern Recognition 47:344-358
Du B, Zhang L (2014b) A Discriminative Metric Learning Based Anomaly Detection Method IEEE Transactions on Geoscience
and Remote Sensing 52(11):6844-6857
Du H, Qi H, Wang X, Ramanath R, Snyder WE (2003) Band selection using independent component analysis for hyperspectral
image processing. Proceedings of 32nd IEEE Applied Imagery Pattern Recognition Workshop 93-98
Du Q (2003) Band selection and its impact on target detection and classification in hyperspectral image analysis. Proceedings of
2003 IEEE Workshop on Advances in Techniques for Analysis of Remotely Sensed Data 374-377
Du Q, Bioucas-Dias JM, Plaza A (2012) Hyperspectral band selection using a collaborative sparse model. Proceedings of 2012
IEEE International Geoscience and Remote Sensing Symposium (IGARSS) 3054-3057
Gao Y, Church G (2005) Improving molecular cancer class discovery through sparse non-negative matrix factorization
Bioinformatics 21(21):3970-3975
Goldberg AV (1997) An efficient implementation of a scaling minimum-cost flow algorithm Journal of algorithms 22(1):1-29
Guan N, Tao D, Luo Z, Yuan B (2011) Manifold regularized discriminative nonnegative matrix factorization with fast gradient
descent IEEE Transactions on Image Processing 20(7):2030-2048
Guan N, Tao D, Luo Z, Yuan B (2012) NeNMF: an optimal gradient method for nonnegative matrix factorization IEEE
Transactions on Signal Processing 60(6):2882-2898
Guo B, Gunn SR, Damper R, Nelson J (2006) Band selection for hyperspectral image classification using mutual information
IEEE Geoscience and Remote Sensing Letters 3(4):522-526
Hazan T, Shashua A (2007) Analysis of L2-loss for probabilistically valid factorizations under general additive noise. Technical
Report 2007-13, The Hebrew University
Hoyer PO Non-negative sparse coding (2002). Proceedings of the 12th IEEE Workshop on Neural Networks for Signal
Processing 557-565
Hoyer PO (2004) Non-negative matrix factorization with sparseness constraints The Journal of Machine Learning Research
5:1457-1469
Jia S, Qian Y (2009) Constrained nonnegative matrix factorization for hyperspectral unmixing IEEE Transactions on Geoscience
and Remote Sensing 47(1):161-173
Karavasilis V, Nikou C, Likas A (2011) Visual tracking using the Earth Mover's Distance between Gaussian mixtures and Kalman
filtering Image and Vision Computing 29(5):295-305
Keith DJ, Schaeffer BA, Lunetta RS, Gould Jr RW, Rocha K, Cobb DJ (2014) Remote sensing of selected water-quality
indicators with the hyperspectral imager for the coastal ocean (HICO) sensor International Journal of Remote Sensing
35(9):2927-2962
Keshava N (2004) Distance metrics and band selection in hyperspectral processing with applications to material identification
and spectral libraries IEEE Transactions on Geoscience and Remote Sensing 42(7):1552-1565
Kim H, Park H (2007) Sparse non-negative matrix factorizations via alternating non-negativity-constrained least squares for
microarray data analysis Bioinformatics 23(12):1495-1502
Kundu MK, Chowdhury M, Banerjee M (2012) Interactive image retrieval using M-band wavelet, earth mover’s distance and
fuzzy relevance feedback International Journal of Machine Learning and Cybernetics 3(4):285-296
Li J-m, Qian Y-t (2011) Clustering-based hyperspectral band selection using sparse nonnegative matrix factorization Journal of
Zhejiang University SCIENCE C 12(7):542-549
Li L, Zhang Y (2009) SENSC: A stable efficient algorithm for nonnegative sparse coding Acta Automatica Sinica
35(10):1257-1271
Melgani F, Bruzzone L (2004) Classification of hyperspectral remote sensing images with support vector machines IEEE
Transactions on Geoscience and Remote Sensing 42:1778-1790
Morup M, Madsen KH, Hansen LK Approximate L0 constrained non-negative matrix and tensor factorization. Proceedings of
IEEE International Symposium on Circuits and Systems (ISCAS 2008) 1328-1331
Murphy RJ, Monteiro ST (2013) Mapping the distribution of ferric iron minerals on a vertical mine face using derivative analysis
of hyperspectral imagery (430–970nm) ISPRS Journal of Photogrammetry and Remote Sensing 75:29-39
Peharz R, Pernkopf F (2012) Sparse nonnegative matrix factorization with L0-constraints Neurocomputing 80:38-46
Pele O, Werman M Fast and robust earth mover's distances (2009). Proceddings of 2009 IEEE 12th international conference on
Computer vision 460-467
Qian Y, Yao F, Jia S (2009) Band selection for hyperspectral imagery using affinity propagation IET Computer Vision
3(4):213-222
Ramirez C, Kreinovich V, Argaez M (2013) Why L1 Is a Good Approximation to L0: A Geometric Explanation Journal of
Uncertain Systems 7(3): 203-207
Ren Z, Yuan J, Zhang Z (2011) Robust hand gesture recognition based on finger-earth mover's distance with a commodity depth
camera. Proceedings of the 19th ACM international conference on Multimedia 1093-1096
Rubner Y, Tomasi C (2000) Perceptual metrics for image database navigation vol 1. Springer
Sandler R, Lindenbaum M (2011) Nonnegative matrix factorization with Earth mover's distance metric for image analysis IEEE
Transactions on Pattern Analysis and Machine Intelligence 33(8):1590-1602
Shi B, Chen N, Sun W (2014) Sparse Nonnegative Matrix Factorization for Hyperspectral Optimal Band Selection Acta
Geodaetica et Cartographica Sinica 42(3): 351-358 [in Chinese]
Steinwart I, Christmann A (2008) Support vector machines. Springer Verlag
Sun W, Halevy A, Benedetto J,Czaja W, Liu C,Wu H, Shi B, Li W (2014) UL-Isomap based nonlinear dimensionality reduction
for hyperspectral imagery classification ISPRS Journal of Photogrammetry and Remote Sensing 89:25-36
Tong X, Xie H, Weng Q (2013) Urban Land Cover Classification With Airborne Hyperspectral Data: What Features to Use?
IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 99: 1-12
Wang T, Du B, Zhang L (2013) A kernel-based target-constrained interference-minimized filter for hyperspectral sub-pixel target
detection IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 6:626-637
Wang Y-X, Zhang Y-J (2013) Nonnegative matrix factorization: A comprehensive review IEEE Transactions on Knowledge and
Data Engineering 25(6):1336-1353
Wen J, Tian Z, Liu X, Lin W (2013) Neighborhood preserving orthogonal PNMF feature extraction for hyperspectral image
classification IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 6(2):759-768
Wen J, Zhao Y, Zhang X, Yan W, Lin W (2014) Local discriminant non-negative matrix factorization feature extraction for
hyperspectral image classification International Journal of Remote Sensing 35(13):5073-5093
Xia W, Wang B, Zhang L (2013) Band selection for hyperspectral imagery: a new approach based on complex networks IEEE
Geoscience and Remote Sensing Letters 10(5):1229-1233
Xiao Z, Bourennane S (2014) Constrained nonnegative matrix factorization and hyperspectral image dimensionality reduction
Remote Sensing Letters 5(1):46-54
Yang H, Du Q, Su H, Sheng Y (2011a) An efficient method for supervised hyperspectral band selection IEEE Geoscience and
Remote Sensing Letters 8(1):138-142
Yang Z, Zhou G, Xie S, Ding S, Yang J-M, Zhang J (2011b) Blind spectral unmixing based on sparse nonnegative matrix
factorization IEEE Transactions on Image Processing 20(4):1112-1125
Zhu F, Wang Y, Xiang S, Fan B, Pan C (2014) Structured Sparse Method for Hyperspectral Unmixing ISPRS Journal of
Photogrammetry and Remote Sensing 88:101-118