detail - Purdue University
advertisement

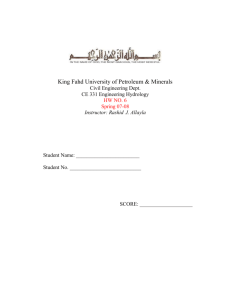
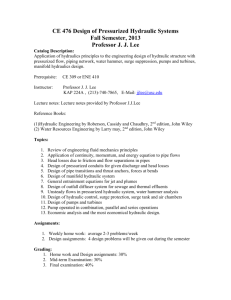
Project 1A2: Optimal Power Management for Mobile Fluid Power Machines using Displacement-Controlled Actuators 1. Research Team Project Leader: Prof. Monika Ivantysynova, ABE/ME, Purdue Other Faculty: Prof. Kim Stelson, ME, UM Prof. Andrew Alleyne, ME, UM Prof. Perry Li, ME, UM Post Doc(s): Graduate Students: Christopher Williamson (Purdue) Joshua Zimmermann (Purdue) Matteo Pelosi (Purdue, visiting researcher) Undergraduate Students: TBD Industrial Partner(s): Bobcat, Parker Hannifin, Caterpillar? 2. Statement of Project Goals The goal of this project is to develop system architectures and control methods for optimal power management in multi-actuator mobile hydraulic machines using displacement-controlled linear and rotary actuators. These concepts will reduce overall machine fuel consumption through use of displacement controlled actuators by avoiding throttling losses and allowing energy recovery. Additional fuel savings are expected due to end effecter control based on path optimization and effective engine management. 3. Project Role in Support of Strategic Plan The project primarily addresses the efficiency barrier by developing new system concepts and control strategies for multi-actuator mobile machines. The project also addresses the compactness barrier since displacement-controlled systems allow higher operating pressures and a reduction of interfaces and components. 4. Overall Project Scope Summary The primary desired result of this project is reduced fuel consumption by hydraulically-powered mobile machines. This will be accomplished through three major innovations: (1) development of system architectures that allow the use of potential and brake energy without adding an energy storage system to the machine, (2) actively managing the generation and transmission of power from an IC engine to multiple hydraulic actuators involving path optimization in order to minimize power consumption while simultaneously satisfying machine performance requirements, and (3) using pump-controlled linear and rotary actuator systems based on previous work done by the research group of Ivantysynova. The project specifically focuses on the class of mobile machines with redundant kinematics that use multiple linear and rotary hydraulic actuators simultaneously. Many vehicles of this type are currently in use, including excavators, cranes, telehandlers, and new types like large mobile robots are under development. The project will be closely related to the development of systems and controls for the excavator testbed. However, the project goal is to develop methods which are generally applicable to many mobile machines and not one specific application or working cycle. Actuator systems based on resistance control are outside of the project scope. The methods developed in this project could be applied to teleoperated machines, however teleoperation is not the focus of this project. 5. Description and explanation of research approach One of the greatest strengths of fluid power technology is power density, the ability to exert large forces and torques using actuators of relatively small mass. Because of this fact, fluid power components are ubiquitous in applications such as agriculture, mining, construction, and manufacturing. As a tradeoff, the efficiency of fluid power systems is relatively low when compared to methods of transmitting power mechanically or electrically. This was not a significant concern in the past, but has become increasingly important with rising fuel prices and increasingly stringent emissions requirements. Project 1A2 focuses on improving the overall efficiency of mobile machines with multiple linear and rotary actuators. Advances in system efficiency will be obtained by: 1. Displacement-controlled actuator systems that eliminate throttling losses 2. Real-time engine and pump management in order to operate each component of the powertrain as close to optimal efficiency as possible 3. Energy recovery without additional storage devices by sharing power between actuators 4. Optimizing machine motion in order to maximize energy recovery and minimize fuel consumption The state of the art will be summarized by topic, followed by a description of the main methods proposed to accomplish the project objectives. 5A. State of the Art: Displacement-Controlled Actuators In today’s mobile machines, working hydraulics are controlled almost exclusively by valves. Valve control allows a simple realization of open loop motion control and load holding tasks, in which the hydraulic actuators are usually supplied by a central pressure source. Displacementcontrolled hydrostatic transmissions are an exception to this rule, as they are often used as propulsion drives for smaller mobile machines. Replacing of valve-controlled systems with displacement control was the subject of diverse research works at universities in the 1990s [4,5,8,27-29,52,53] and of development projects in industry [1,2,3]. These projects sought to transfer the previously known concept of a closed hydraulic circuit drive from special stationary applications to applications in a higher power range. The achievable dynamic performance and the development of control concepts were of principle interest [7,8,52]. With new circuit solutions, design, and control techniques it has been demonstrated that displacement controlled actuator are able to achieve a dynamic behavior comparable to valve controlled servo drives [8-10]. The first real implementations can be found in stationary hydraulics: e.g. press industry, injection molding machines, etc. For mobile machines, load-sensing systems (working in an open control loop) are mainly used currently. In spite of some research work dealing with electrohydraulic load-sensing [12,13,17,30,50,51] this drive technology is not used in practice at the moment due to an extended signal control and sensor effort. Feedback control, which will be required more and more in mobile machines in the future, load-sensing technology leads to additional complicated control and stability problems. In this case multi-variable control concepts have to be applied, which are able to adapt the system pressure online during wide changes in the particular control plants. As mentioned earlier, displacement-controlled linear drives represent an alternative. Mainly because of space reasons, single rod cylinders are used almost exclusively as linear actuators for the working boom structures of today’s mobile machines. To operate a single rod cylinder in a closed hydraulic circuit with a servo pump as the final control element, appropriate circuit solutions are necessary in order to balance the unequal flow rates entering and leaving the cylinder volumes. Several concepts can be found in the literature [14,15,28,29,40,41] that were developed mainly for stationary applications. Due to the relatively high number of components, and in some cases very complicated multi-variable control concepts, these circuit concepts are not suitable for mobile machines. Replacing valve-controlled actuators with displacementcontrolled actuators that require two or more displacement units and perhaps even more components is too extensive for mobile machines and therefore not acceptable. For example, Berbuer [8] in 1988 introduced a hydraulic transformer for the volume flow compensation of the single rod cylinder. Continued implementation of a hydraulic transformer with an additional variable displacement pump was developed by Lodewyks in 1993 and 1994 [28,29] . In this case, the transformer ratio had to be designed to the single rod cylinder area ratio. Lodewyks further noted that by adding a variable displacement pump with a sum pressure control valve (pressurized low pressure) the actuator eigenfrequency can be increased. Lodewyks also researched the use of two servo pumps for the single rod cylinder in a multivariable control concept and in a single variable control concept. The single variable control concept was realized with a sum pressure control valve and an additional pressure source. Next to the development of suitable control concepts, Lodewyks proved some of his results on stationary test rigs. The use of two servo pumps [14,15] in a multi-variable control concept, in which one pump works in position and the other pump in a pressure control, was also introduced by Feuser et al. However, a four-quadrant operation of multiple actuators according to this concept leads to a high installation cost for the pressure controlled units to realize parallel actuator movements. An innovative hydraulic transformer, which is based on the bent axis principle, was developed by INNAS [1-3]. It contains three ports, where the control of volume flow to the individual ports is achieved by controlling the valve plate. This transformer can only be used for the single rod cylinder in four quadrant operation together with an additional high pressure source. However, it must be noted that this additional high pressure source has to be sufficient in size for all single rod cylinders. And for each actuator one bent axis transformer needs to be implemented in the overall machine system. A fork lift machine with two-quadrant cylinders was equipped with this hydraulic drive technology as a prototype [2]. Another concept [6,40,41] consists mainly of a fixed displacement pump working together with a control valve, a switch valve and a check valve. Here the rod-side chamber of the single rod cylinder is only connected to an accumulator, so that a four quadrant operation cannot be realized in all operating points. This concept was also successfully implemented and tested in a stationary industry application. Many authors have investigated displacement-controlled actuators with double-rod cylinders or rotary motors. For instance, Hahmann in 1973 [19] and Kreth in 1979 [26] analyzed the dynamic behavior of displacement controlled drives generally. They found out that these drives are well-suited for control tasks. Sprockhoff mainly focused his work on control concepts on displacement-controlled actuators with double rod cylinders [46,47]. Roth in 1983 [42] developed control concepts for actuators with rotational motors in position control. Both researchers concluded that the best dynamic behavior can be realized with acceleration or pressure feedback as a partial state feedback. Roth and Berbuer, mainly motivated by possible energy savings and achievable high dynamics, presented the parallel use of servo pumps and servo valves [8,42]. Berbuer decoupled the electrical signals so that the servo valve was only used for high frequency outputs. Next to these concepts, according to research on displacement controlled actuators with single rod cylinders the works dealing with the use of a variable speed servo pump can be mentioned here [18,43]. But for the implementation in mobile machines with an open loop controlled Diesel engine as drive speed source these concepts clearly drop out of consideration. Concepts for mobile manipulators and robots based on a control of the single rod cylinder by two control valves [10,49] combined with advanced control theory, on the one hand not improve energy efficiency significantly compared to throttling control and on the other hand require extended control, signal and sensor expenditure. Although not well known in the academic literature, a concept for closed circuit displacement control was patented in 1994 based on a variable displacement pump and a low pressure charge line for compensating the difference in volumetric flow through the cylinder [20]. A 2-position 3-way valve is used to connect the charge line to the low pressure side of the cylinder. This circuit was successfully implemented on a mobile forestry machine [27]. A similar concept was developed independently by Ivantysynova and Rahmfeld [22,23,32-35,38] which uses a variable displacement pump with differential flow compensation via a low pressure charge line and two pilot operated check valves, as shown in Figure 1. Several advantages make this concept attractive: Throttling losses are eliminated Relief and check valves can be integrated into the pump case, thereby reducing the number of discrete components and fluid connectors Multiple cylinders can share a single low pressure line Recovery of potential and kinetic energy is possible since the pump automatically runs in motoring mode when the cylinder is driven by an aiding load xcom Controller adjustment CE Figure 1: Closed circuit displacement-controlled single rod cylinder Fuel savings of 15% over a load-sensing system was demonstrated by experiment using prototype wheel loaders [32]. The closed-circuit displacement control concept was also shown to be robust and have sufficient bandwidth for controlling hydraulic cylinders in working machines. Another advantage of this control concept is that it reduces some of the nonlinearities that make feedback control of hydraulic systems problematic. Flow through control valves is determined by pressure, which in turn is a function of the load on the cylinder. Traditional circuits also use actuators arranged in parallel, so the motion of all of the cylinders is coupled. The displacement-controlled circuit decouples the actuators by controlling each cylinder with a separate pump. Further, the pump flow rate (and thus the cylinder velocity) is essentially independent of pressure. Of course, this concept is not without limitations. One pump is required for each actuator, and the maximum speed at which the cylinder can be retracted is limited by the size and speed of the pump. A recent development (2006) by Heybroek and Palmberg [19] addresses the latter by using an open hydraulic circuit and 2-way switching valves. This is a promising concept that will be evaluated more fully in future development and testing. Another benefit of displacement control that has been investigated by Ivantysynova et al. is active vibration damping. Active damping for valve-controlled excavators and similar hydraulic manipulators has been researched by many authors (refer to review paper [39]), but has not been put into commercial production because of the high cost of additional hardware and energy consumption. Displacement-controlled systems offer an economical alternative because a hydraulic servo pump (of sufficient control bandwidth) can be used for powering the cylinder as well as actively cancelling oscillations. The only additional component required is an accelerometer for acceleration feedback. This concept has been explored in some detail by Rahmfeld and Ivantysynova [36,38]. Eggers compared active damping with load-sensing and displacement-controlled systems based on energy consumption [11]. His simulations showed that the displacement-controlled cylinders require 40-60% less power for active damping due to reduced losses and energy recovery. 5B. State of the Art: Power Management Diesel IC engines are the most common power source for mobile hydraulic machinery. The efficiency of IC engines varies with torque and speed. Since the same power requirement can be satisfied with multiple combinations for engine torque and speed, engine fuel consumption can be minimized by controlling the engine so that it operates along its peak efficiency curve. This topic has seen a great deal of development for vehicles with mechanical CVTs [55,58,6264,69,70]. Significant research has also been done on power management for vehicle drivetrains based on hydrostatic transmissions and power-split drives [54,56-57,59-61,65-668,71-75]. For example, Ossyra [65-68] presented a control method for hydrostatic transmissions involving two real-time optimization loops: one feedback loop for the engine based on steady-state efficiency characteristics and the other for the hydrostatic transmission based on detailed steady-state loss models of the hydraulic pump/motor units. However, there has been little work on engine power management for mobile hydraulic machinery in which the primary energy consumers are working functions rather than the propulsion drive. Two papers from Asian industrial research groups in 1988 and 1993 describe efficiency improvements by controlling engine speed on an excavator [76,79]. Lawrence and Sepehri et al. [27] measured significant energy savings with a pump-controlled excavator that was developed for demonstrating operator control concepts. Reducing fuel consumption was not a main objective of their project, however, and power management was not considered. More recently, Alleyne et al. have developed control methods for optimizing the powertrains of earthmoving vehicles with respect to energy consumption [77,80,82]. No previous research exists on power management for excavators or similar machines using pump-controlled actuators. One advantage of displacement control for power management is that each actuator is powered by an independently controllable pump. This arrangement offers more degrees of freedom than valve-controlled systems in which the actuators are arranged in parallel and powered by a single pump. It should be noted that excavators and similar hydraulic manipulators, unlike trucks and passenger vehicles, often demand maximum engine power during typical working cycles. Therefore, the efficiency improvements that can be expected by engine power management alone will likely be modest compared to vehicles with continuously variable transmissions (either mechanical or hydraulic) that rarely operate at maximum load and speed. Displacement-controlled systems are also well-suited for power management because of the potential for energy recovery. Power can be recovered from actuators with aiding loads and simultaneously applied to actuators with resistive loads. Power sharing between actuators is particularly attractive for machines with multi-link manipulators such as excavators and cranes, since aiding and resistive loads are frequently encountered simultaneously during typical working cycles. Previous research has been done by several authors [78,81 for example] regarding energy recovery for excavators using high pressure accumulators as storage devices. The obvious disadvantages of this approach are the cost, space, and maintenance requirements associated with adding accumulators as well as the energy losses inherent to storage and retrieval. Recovering energy without storage using displacement-controlled actuators was researched to some extent in the early 1990s by Lawrence et al. [27], but there appears to have been no subsequent work on this topic in the last ten years. A logical progression of research involving power sharing is controlling the actuator motion in order to maximize recovered energy. This topic will be discussed in more detail in the next State of the Art topic. 5C. State of the Art: Machine Motion Control and Automation A great deal of research has been done to develop automated motion controls for hydraulic manipulators. Dozens, perhaps hundreds, of papers could be cited. (See refs [83-114]) Singh attempted to summarize the state of the art in 1997 and again in 2002 [104,105]. He classifies most of the research into four levels of automated earthmoving, in order of increasing automation: 1. Tele-operation. The operator controls the machine joints just as he would for manual operation, except he is physically removed from the machine. 2. Trajectory Control. The system assists a human operator by controlling the digging motion within a narrow range of parameters. Trajectory control could take many forms, including maintaining a certain bucket angle while moving the boom, keeping the bottom of a trench level while digging, adjusting the digging motion according to measured soil conditions, or controlling the implement to avoid hitting a buried object such as a pipe or unexploded ordnance. 3. Tactical Planning. The system senses the current state of the environment and decides where to dig and in some cases a nominal plan of how to dig. 4. Strategic or Site Planning. The system is able to accomplish an entire excavation, such as digging a foundation, by dividing the task into subtasks and effectively executing them based on an overall strategy and sensor information regarding the initial and instantaneous state of the job site. Many hydraulic robots have been successfully developed, including a few that function at the highest levels of automation [102,103,107]. However, designing a hydraulic robot with sensor systems and artificial intelligence is far outside the scope of Project 1A2. Instead, we intend to develop a system along the lines of Level 2 that controls the implement trajectory in order to satisfy the required machine function (e.g. digging a trench, moving an object) while optimizing the motion for energy consumption. Many hydraulic manipulators employ redundant kinematics, i.e. the machine has more degrees of freedom than the minimum necessary to position an end effecter in space at a particular orientation. This fact can be exploited to choose the optimal manipulator trajectory for minimizing the consumption of primary energy and maximizing energy recovery. A configuration is anticipated in which the operator specifies the desired position and orientation of the end effecter, while the control system calculates the necessary actuator motions based on the inverse kinematics of the joints and an energy cost function. Related research on this type of “coordinated motion control” has been conducted by Lawrence et al. [88]. The goal of previous research was to improve operator productivity, particularly for remotely operated machines. To the best of our knowledge, coordinated actuator control in order to reduce fuel consumption has not been previously considered. Although developing autonomous mobile machines is not a goal of Project 1A2, the systems developed in this project are likely to contribute to the development of mobile hydraulic robots in general. One of the difficulties encountered by researchers in the past is the high degree of nonlinearity of fluid power systems. In a valve-controlled excavator, for example, the pressure and flow to each cylinder is dependent on the load it sees. Because the cylinders are arranged in parallel, the equations describing the flow to each actuator and to tank are coupled. Variation of fluid properties (such as viscosity) with temperature and the presence of pressure relief valves add to the nonlinearity of the hydraulic system. These nonlinearities necessitate extensive effort to design and implement effective control systems, as well as high computational requirements to execute them in real time. Displacement-controlled actuators reduce the system nonlinearity in two ways. First, the actuator flow equations are decoupled since each actuator operates in a separate closed hydraulic circuit. The low pressure charge lines remain coupled, but the pressure in these lines is only allowed to vary within a narrow range. Second, the actuator motion is essentially loadindependent. (There is some pressure dependence due to volumetric pump losses.) The relative simplicity of displacement-controlled actuator systems will facilitate the development of mobile hydraulic robots with less cost and complexity compared to previous projects based on hydraulic valve control. 5D. Research Approach and Methods The basic research approach that will be employed for Project 1A2 involves detailed modeling and simulation followed by experimental measurement. The emphasis on careful modeling will ensure that methodologies are developed which can be employed in a more general way to the development of related machines and applications. The first step in this project is the analyzing the current state of the art. A dynamic model will be created to simulate the hydraulic system and multi-body dynamics of a load-sensing excavator (the machine to be used as test bed 1). Typical working cycles will be simulated and the model will be used to quantify power losses and the possibility for efficiency improvements. Measurements of fuel consumption on the actual machine will be made to validate the accuracy of the model. Experimental measurements will also help to quantify expected variations in working cycles and fuel consumption due to environmental conditions and different operators. The second project step is the design and simulation of a displacement-controlled hydraulic system for the excavator test bed. This will be an iterative process in which the system design will be optimized for fuel efficiency while meeting performance requirements and other constraints. Simulations using the dynamic model of the pump-controlled excavator will be used to estimate the expected fuel savings compared to the load-sensing machine. The dynamic model will also be used in the development of control systems as a nonlinear plant model. The basic control structure developed in previous work for displacement-controlled cylinders consists of cascaded feedback loops in which the inner loop consists of the pump displacement control (typically with a simple proportional gain) and the outer loop consists of cylinder position or velocity control. This concept is illustrated in Figure 2. This simple approach will be used in the early stages of the project for implementing displacement-controlled actuators on the test bed prototype. Control methods for power management and path optimization will be developed and demonstrated primarily by simulation. Hardware in the loop testing may be used to validate results obtained through simulation. Complete implementation of these algorithms on the test bed prototype is proposed for a second five years of project development. Figure 2: Basic displacement control structure 6. Brief research plan and a timeline of major milestones Task 1: Analysis of state-of-the-art example machine (excavator) [Months 1-12] o Development of a coupled hydraulic and multi-body dynamics simulation model in Matlab/Simulink to simulate typical working cycles and predict energy consumption for excavator with LS hydraulic system o Estimate possible efficiency improvements from throttling losses and recoverable energy based on simulation o Measurements of fuel consumption on state of the art machine (Test bed 1) Task 2: Hydraulic system design using pump-controlled actuation for entire machine [Months 13-18] o Actuator design for selected functions o Dynamic model of the displacement-controlled actuator including detailed empirical pump loss model (Polymod) o Development of coupled hydraulic and multi-body dynamics simulation model in Matlab/Simulink for displacement-controlled hydraulic system Task 3: Development of actuator control methods [Months 6-18] o Development of linearized plant model o Control synthesis based on linear methods and cascaded feedback loops o Simulation of controller performance using nonlinear continuous and discrete time models Task 4: Detailed design and implementation of one actuator on excavator test bed [Months 18-24] o Installation of prototype actuator based on available hardware in excavator test bed o Implementation of actuator control on CAN based microcontroller o Performance demonstration o Measurement of fuel consumption to demonstrate energy savings Task 5: Development of power management control methods [Months 25-48] o Development of steady-state efficiency maps and loss models o Analysis of typical tasks and working cycles o Control synthesis based on linear and nonlinear methods (exact approach TBD) o Simulation of controller performance using nonlinear continuous and discrete time models, various working cycles Task 6: Detailed design and implementation of second actuator on excavator test bed [Months 37-48] o Installation of second prototype actuator in excavator test bed o Performance measurements o Demonstration of potential energy savings using a combination of simulation and hardware in the loop Task 7: Implementation of power management control methods [Months 49-60] o Implementation of control algorithms on CAN-based microcontroller Milestones: [Month 12]: Model of state of the art load sensing system of example machine (excavator) Coupled hydraulic and multi-body dynamics simulation model in MatLab to simulate typical working cycles and predict energy consumption Fuel consumption for typical operating cycle of state of the art machine (test bed 1) Actuator design for one selected function [Month 24]: System design for a complete displacement controlled machine to allow optimal use of regenerative brake energy Dynamic model of the displacement controlled actuator including Polymod loss model Coupled hydraulic and multi-body dynamics simulation model in MatLab for the combined actuator system (LS and displacement controlled actuators) Prototype Design and control concept for one function based on available hardware [Month 26]: Prototype actuator installed and tested in excavator test bed including CAN bus controller, performance demonstration , fuel consumption for test bed measured [Month 48]: Second prototype actuator installed and tested, performance demonstration [Month 60]: Demonstrated energy savings by machine power management strategy and control 2006 ID Task Name Start Finish 2007 2008 2009 2010 2011 Duration Q3 1 Task 1 7/3/2006 7/3/2007 52.4w 2 Task 2 7/2/2007 1/1/2008 26.4w 3 Task 3 1/1/2007 1/1/2008 52.4w 4 Task 4 1/1/2008 7/1/2008 26.2w 5 Task 5 8/1/2008 7/1/2010 100w 6 Task 6 7/1/2009 7/1/2010 52.4w 7 Task 7 7/1/2010 7/1/2011 52.4w Q4 9/1/2008 Demonstration of one displacementcontrolled actuator on excavator testbed, validating simulation results for complete system energy savings using displacement-controlled actuators Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 7/1/2010 Demonstration of second displacementcontrolled actuator. Demonstration of effective actuator control methods. Q1 Q2 Q3 Q4 Q2 7/1/2011 Demonstration of power management control methods and system energy savings 7/3/2006 - 7/1/2011 Project 1A2 7. How will project results be integrated into test beds? The prototype actuators and control methods will be implemented and tested on the excavator test bed (TB1). 8. Describe upstream and downstream dependencies With respect to the strategic goal of the ERC (compact, efficient and effective fluid power systems) many dependencies appear. The displacement controlled actuator technology developed in this project require more efficient pumps and motors (upstream dependency), which will be developed in 1B. The displacement controlled actuators require advanced pump control systems of high bandwidth. One of the possible solutions could be based on the fast switching valve technology to be developed in 1E. The implementation of complete machine functions based on displacement controlled actuators will involve new human machine interface systems to be developed in 3A (Human Factors and Haptic Interfaces for Fluid Power Systems). Most of the studied systems will involve relatively long transmission lines of actuators. The results of project 1D can contribute to more energy savings of the technology developed within this project. An appropriate system design methodology is required for a successful implementation of a machine power management strategy. The methods developed in 2F (Dynamically Scalable Fluid Power Systems) could be potentially used to design entire systems more effective. The development of displacement controlled machine functions will also require major changes in machine design. Here the technologies developed in project 2E (Component Integration for Compact Fluid Power Systems) could be key factor for introducing the new system architecture in complex machines. New control methods developed in 1A1 (Integrated Algorithms for Optimal Energy Use) could also be used as part of the control development for this project. 9. Expected resources required from the ERC in years 1, 2 and project completion Q1 Monika Ivantysynova (PI) 0.5 month summer pay each year Year 1: one graduate students ($45,000), one visiting researcher 0.5 ($10,000), Travel: $ 2,000 Year 2: Two graduate students ($90,000), 1 REU ($ 5,000), Travel: $ 5,000 Year 3: Two graduate students ($90,000), 1 REU ($ 5,000), Travel: $ 5,000 Year 4: Two graduate students ($90,000), 1 REU ($ 5,000), Travel: $ 5,000 Year 5: Two graduate students ($90,000), 1 REU ($ 5,000), Travel: $ 5,000 10. Requests from industry partner. Excavator Detailed model parameter information for excavator Test cycles Benchmark energy usage data for existing excavator 11. References 11A. References: Displacement Control of Hydraulic Actuators [1] Achten, P.A.J. 1997. Transforming Future Hydraulics – A new design of a hydraulic transfer. 8th Scandinavian International Conference on Fluid Power. Linkoping, Sweden. [2] Achten, P.A.J. 1999. Trennen statt stapeln – Die Nutzung des Centaur Freikolbenmotors bei einem Gabelstapler. (Separation instead of stacking – the application of the Centaur free piston engine in a fork-lift truck. VDI-MEG Tagung Landtechnik, pp. 353-358, Braunschweig, Germany. [3] Achten, P. A. J. and Palmberg, J.-O. 1999. What a Difference a Hole Makes – the Commercial Value of the INNAS Hydraulic Transformer. 6th Scandinavian International Conference on Fluid Power. [4] Backé, W. 1994. Verlustarme hydrostatische Antriebe – Grundlagen und Anwendungen. VDI Berichte No. 1132. Dusseldorf: VDI. [5] Backé, W. 1995. Trends in Mobile Hydraulics. 4th International Conference on Fluid Power. Tampere, Finland. [6] Backé, W. 2000. Concerning: Research and Development in Fluid Power Technology. 1st FPNI-PhD Symposium Hamburg 2000, pp. 9-21, Hamburg, Germany. [7] Berbuer, J. 1985. Parallelschaltung von Servopumpe und Servoventil – ein Weg zu energiesparenden hochdynamischen Antrieben. Olhydraulik und Pneumatik 29 (1985) No. 10, pp. 742-751. [8] Berbuer, J. 1988. Neuartige Servoantriebe mit primärer Verdrängersteuerung. Dissertation, RWTH Aachen, Germany. [9] Berg, H. 1999. Robuste Regelung verstellbarer Hydromotoren am Konstantdrucknetz. PhD dissertation. VDI Fortschritt-Berichte. Reihe 8 Nr. 764. Düsseldorf: VDI. ISBN: 3-18376408-3. [10] Bindel, R. et al. 2000. Flachheitsbasierte Regelung eines hydraulischen Antriebs mit zwei Ventilen fur einen Grossmanipulator. at Automatisierungstechnik, No. 3/2000, pp. 124131. [11] Eggers, B. 2004. Extended Control Concepts and Energetic Aspects for Active Oscillation Damping with Displacement Controlled Linear Actuators. Diploma Thesis, Purdue University, December 20 [12] Esders, H. 1994. Elektrohydraulisches Load-Sensing fur die Mobilhydraulik. Olhydraulik und Pneumatik 38 (1994) No. 8, pp. 473-480. [13] Esders, H. 1996. Elektrohydraulisches Load Sensing für mobile Anwendungen. Dissertation, TU Braunschweig, Germany. [14] Feuser, A.; Dantlgraber, J.; Spath, D. and Wilke, O. 1995. Servopumpenantriebe für Differentialzylinder. Ölhydraulik und Pneumatik 39 (1995) No. 7, pp. 540-544. [15] Feuser, A.; Liebler, G. and Köckemann, A. 1998. Elektrohydraulische Achsen mit Verstellpumpen zur Verbesserung des Wirkungsgrades. Ölhydraulik und Pneumatik (1998) 42 No. 6, pp. 378-383. [16] Grabbel, J. and Ivantysynova, M. 2005. An Investigation of Swash Plate Control Concepts for Displacement Controlled Actuators. International Journal of Fluid Power, Vol. 6, No. 2 (August 2005), pp. 19-36. [17] Gu, L. and Wang, Q. 2001. Research on Noninterference Control of Multiple Actuators Load Sensing System with High Inertia in Construction Machinery. 5th International Conference on Fluid Power Transmission and Control (ICFP'2001), Hangzhou, China, pp. 373-377. [18] Habibi, S. R. and Singh, G. 2000. Derivation of Design Requirements for Optimisation of a high Performance Hydrostatic Actuation System. International Journal of Fluid Power, Vol. 1, No. 2, pp. 11-28. [19] Hahmann, W. 1973. Das dynamische Verhalten hydrostatischer Antriebe mit Servopumpe und ihr Einsatz im Regelkreis. Dissertation, RWTH Aachen, Germany. [20] Hewett, Allan J. 1994. Hydraulic Circuit Flow Control. US Patent No. 5,329,767. July 19, 1994. [21] Heybroek, K.; Larsson, J. and Palmberg, J.O. 2006. Open Circuit Solution for Pump Controlled Actuators. Proceedings of 4th FPNI PhD Symposium, pp. 27-40. Sarasota, Florida, USA. [22] Ivantysynova, M. 2000. Displacement Controlled Linear and Rotary Drives for Mobile Machines with Automatic Motion Control. SAE Int. OFF-Highway & Powerplant Congress, Milwaukee, Wisconsin, USA. [23] Ivantysynova, M. 2002. Displacement Controlled Actuator Technology - Future for Fluid Power in Aircraft and other Applications. Proc. of the 3rd International Fluid Power Conference (3. IFK), Vol. 2, S. 425-440, Aachen. [24] Ivantysynova, M. and Ossyra, J.-C. 2003. Control Concept for Hydrostatic Drive Lines. The Fourth International Symposium on Fluid Power Transmission and Control (ISFP'03), Wuhan, China. [25] Kiesow, S. 1978. Antrieb mit einem an einen geschlossenen hydraulischen Kreislauf angeschlossenen Differentialzylinder, Patent DE 2.706.091. [26] Kreth, N. 1979. Untersuchungen zum dynamischen Verhalten eines geschlossenen hydrostatischen Kreislaufs mit Verstelleinheiten. Dissertation, Universitat Dortmund, Germany. [27] Lawrence, P.D. ; Salcudean, S.E. ; Sepehri, N. ; Chan, D. ; Bachmann, S. ; Parker, N ; Zhu, M. and Frenette, R. 1995. Coordinated and Force-Feedback Control of Hydraulic Excavators. 4th International Symposium on Experimental Robotics, ISER’95. Stanford, California. [28] Lodewyks, J. 1993. Differentialzylinder im geschlossenen hydrostatischen Getriebe. Olhydraulik und Pneumatik 37 (1993) No. 5., pp. 394-401. [29] Lodewyks, J. 1994. Der Differentialzylinder im geschlossenen hydrostatischen Kreislauf. Dissertation, RWTH Aachen, Germany. [30] Lovrec, D.; Deticek, E. And Kiker, E. 1995. Elektrohydraulisches Load Sensing unter Verwendung von Fuzzy Logik. 10. Fachtagung Hydraulik und Pneumatik, pp. 535-550, Dresden, Germany. [31] Püschel, R. 2000. Hydraulic Drive with several Hydraulic Consumers also comprising a Differential Cylinder, Patent WO 00/73667 A1. [32] Rahmfeld, R. 2002. Development and Control of Energy Saving Hydraulic Servo Drives for Mobile Systems. PhD Thesis, VDI Fortschritt-Berichte. Reihe 12 Nr. 527. Düsseldorf: VDI. [33] Rahmfeld, R. and Ivantysynova, M. 2001. Displacement Controlled Linear Actuator with Differential Cylinder—A Way to Save Primary Energy in Mobile Machines. 5th International Conference on Fluid Power Transmission and Control (ICFP 2001), pp. 296301, Hangzhou, China. [34] Rahmfeld, R. and Ivantysynova, M. 2003. Energy Saving Hydraulic Displacement Controlled Linear Actuators in Industry Applications and Mobile Machine Systems. The Fourth International Symposium on Linear Drives for Industry Applications (LDIA03), Birmingham, UK. [35] Rahmfeld, R.; Ivantysynova, M. and Weber, J. 2003. IBIS - Advanced Multi-functional Machinery for Outdoor Applications. The 18th International Conference on Hydraulics and Pneumatics, ICHP 2003, pp. 137-149, Prague, Republic. [36] Rahmfeld, R. and Ivantysynova, M. 2003. New Displacement Controlled Linear Actuator Technology—A Suitable Control Element for Active Oscillation Damping. 8th Scandinavian International Conference on Fluid Power, Tampere, Finland. [37] Rahmfeld, R.; Ivantysynova, M. and Weber, J. 2004. Displacement Controlled Wheel Loader – a simple and clever Solution. 4. IFK (Int. Fluid Power Conference), Dresden, Germany. [38] Rahmfeld, R.; Ivantysynova, M. and Eggers, B. 2004. Active Vibration Damping for OffRoad Vehicles using Valveless Linear Actuators. SAE Commercial Vehicle Engineering Congress & Exhibition, October 26-28, Chicago, USA. [39] Rahmfeld, R. and Ivantysynova, M. 2004. An Overview about Active Oscillation Damping of Mobile Machine Structure. International Journal of Fluid Power, Vol. 5 (2004), No. 2, pp. 5-24. [40] Roosen, K. 1997. Energieeinsparung durch ein neues Schaltungskonzept fur ventilgesteuerte hydraulische Linearantriebe. Olhydraulik und Pneumatik 41 (1997) No. 4, pp. 262-274. [41] Roosen, K. 2000. Hydraulische Stellantriebe mit Nebenstromregelung. Dissertation, RWTH Aachen, Germany. [42] Roth, J. 1983. Regelungskonzepte fur lagegeregelte elektrohydraulische Servoantriebe. Dissertation, RWTH Aachen, Germany. [43] Rühlike, I. 1997. Elektrohydraulische Antriebssysteme mit drehzahlveranderbarer Pumpe. Olhydraulik und Pneumatik 41 (1997) No. 9 and 10, pp. 689-693 and pp. 752-759. [44] Rühlike, I. 1997. Elektrohydraulische Antriebssysteme mit drehzahlveranderbarer Pumpe. Dissertation, TU Dresden, Germany. [45] Song, L. and Bin, Y. 2002. Energy-saving control of single-rod hydraulic cylinders with programmable valves and improved working mode selection. Proceedings of IFPE 2002, pp. 81-91. [46] Sprockhoff, V. and Jacobs, H. M. 1979. Regelung von hydrostatischen Zylinderantrieben mit Servopumpe bei zeitvarianten Einflussgrossen. Olhydraulik und Pneumatik 23 (1979) No. 4, pp. 284-289. [47] Sprockhoff, V. 1979. Untersuchungen von Regelungen am hydrostatischen Zylinderantrieb mit Servopumpe. Dissertation, RWTH Aachen, Germany. [48] Thumm, F. 1975. Hydraulische Presse und Verfahren zu Ihrem Betrieb. DE Patent (Offenlegungsschrift) DE2.349.351. [49] Westkamper, E. and Bindel, R. 1988. Mehrgrossenregelung hydraulischer Antriebe – Potentiale fur Handhabungsgerate. Olhydraulik und Pneumatik (1988) No. 4, pp. 240245. [50] Zähe, B.; Linden, D. and Gawlikowski, R. 1993. Load-Sensing als Mehrgrossenregelung. Olhydraulik und Pneumatik 37 (1993) No. 8. [51] Zähe, B. 1997. Energiesparende Schaltungen hydraulischer Antriebe mit veranderlichem Versorgungsdruk und ihre Regelung. Dissertation RWTH Aachen, Germany. [52] Ziegler, R. 1990. Auslegung und Optimierung schneller Servopumpen. Dissertation, Universitat Karlsruhe, Germany. [53] Ziegler, R. and Wilke, O. 1991. Pumpenregelung: ein energiesparendes Antriebskonzept mit hoher Regelgute. Olhydraulik und Pneumatik 35 (1991) No. 7. 11B. References: Power Management for Vehicle Transmissions [54] Chrostowski, H., Sradmski, W., 2003. Evaluation of Energetic Possibilities and Ecological Characteristics of IC Engine and Hydrostatics Transmission System for Spectrum Form of Load. Proceedings of 1st International Conference on Computational Methods in Fluid Power Technology. Melbourne, Australia [55] Deacon, M., Brace, C.J., Vaughan, N.D., Burrows, C.R., and Horrocks, R.W., 1999. Impact of alternative controller strategies on exhaust emissions from an integrated diesel/ continuously variable transmission powertrain, Proceedings of the Institution of Mechanical Engineers, Part D (Journal of Automobile Engineering), v213, n D2, p 95107. [56] Filipi Z., Louca L., Daran B., Lin C.-C., Yildir U., Wu B., Kokkolaras M., Assanis D., H. Peng, P. Papalambros, J. Stein, D. Szkubiel and R. Chapp, Combined Optimisation of Design and Power Management of the Hydraulic Hybrid System for the 6×6 Medium Truck, International Journal of Heavy Vehicle Systems, Vol. 11, No. 3/4, pp. 372-402, 2004 [57] Fonselius, J. 2001. Comparing Different Control Strategies of Hydrostatic Transmission System. Dissertation. Tampere University of Technology, Finland. [58] Guzzella L., and Schmid, A.M., 1995. Feedback Linearization of Spark-Ignition Engines with Continuously Variable Transmissions, IEEE Transactions on Control Systems Technology, vol. 3, no. 1. [59] Huhtala, K., Nikkila, P., Vahlsten, P. And Vilenius, M. 1999. The Effect of Control to the Efficiency of the Hydrostatic Transmission. 6th Scandinavian International Conference on Fluid Power (SICFP’99). Tampere, Finland. [60] Huhtala, K., Fonselius, J. and Vilenius, M. 2001 . Comparing different control strategies of hydrostatic transmissions. 7th Scandinavian International conference on Fluid Power (SICFP’01). Linkoping, Sweden. [61] Ivantysynova, M. and Ossyra, J.C. 2002. Hardware in-the-loop test environment for vehicle driveline control optimization. Proc. of Fourth International Conference on Machine Automation ICMA’02, Tampere, Finland, pp. 57-65. [62] Kim, T. and Kim, H., 2002. Performance of integrated engine-CVT control considering powertrain loss and CVT response lag, Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, v 216, n 7, p 545-553. [63] Liu S. and Paden B., A Survey of Today’s CVT Controls, Proceedings of the 36th IEEE Conference on Decision and Control, pp. 4738-43, 1997. [64] Liu, S., and Stefanopoulou, A.G., 2002. Effects of control structure on performance for an automotive powertrain with a continuously variable transmission, IEEE Transactions on Automatic Control, vol. 10, no. 5, pp. 701-9, Sept. 2002. [65] Ossyra, J.C. and Ivantysynova, M. 2004. Application for a Direct Optimization Procedure for Drive Line Control. Bath Workshop on Power Transmission and Motion Control PTMC 2004, Bath, UK, pp. 53 – 69. [66] Ossyra, J.-C. and Ivantysynova, M. 2004. Drive Line Control for Off-Road Vehicles Helps to Save Fuel. 2004 SAE International Commercial Vehicle Engineering Congress , Chicago, IL, USA, SAE Technical Paper 2004-01-2673 [67] Ossyra, Jean Claude 2004. Control Concepts for Vehicle Drive Line to Reduce Fuel Consumption. PhD Thesis. TUHH Hamburg, Reihe 12, No. 598. [68] Ossyra, J.-C. and Ivantysynova, M. 2005. Fuel Savings by Closed Loop Control. IFPE Technical Conference, Las Vegas, USA. Technical Paper NCFP I05-2.1 [69] Pfiffner, R., Guzzella, L., and Onder, C.H. 2003. Fuel-Optimal Control of CVT Powertrains. Control Engineering Practice 11, pp. 329-336. [70] Pfiffner R. and Guzzella L., Optimal operation of CVT-based powertrains, International Journal of Robust and Nonlinear Control, vol. 11, no. 11, Sept. 2001, pp. 1003-21. [71] Savaresi, S. M., Taroni, F., Prevedi, F., and Bittanti S., 2003. On the design and tuning of the controllers in a power-split continuously variable transmission for agricultural tractors, Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, v 217, n 8, p 745-759. [72] Seeger, J. 2001. Untersuchung des Systems “Dieselmotor-Leistungsverzweigtes Getriebe” am Versuchsstand und in der Praxis. Hydraulische Leistungsubertragung der VDI – Tagung am 29./30. March 2001. Kassel. [73] Surampudi, B. 2002. Optimum control of a hydrostatic powertrain in the presence of accessory loads. 49th National Conference on Fluid Power. Las Vegas, USA. 401-412. [74] Wu, B. et al. 2002. Optimization of Power Management Strategies for a Hydraulic Hybrid Medium Truck, Proceedings of AVEC’02, 6th International Symposium on Advanced Vehicle Control, Hiroshima, Japan, Sep. 9-13, 2002. [75] Wu, B. et al. 2004. Optimal Power Management for a Hydraulic Hybrid Delivery Truck, Vehicle System Dynamics 2004, Vol. 42, Nos. 1–2, pp. 23–40. 11C. References: Power Management for Mobile Machines with Multiple Actuators [76] Chun, S.Y. and Seo, B.H. 1993. Design of an artificial intelligence controller for effective control of engine speed and pump flow according to working condition of an excavator. Proceedings of TENCON ’93, pp 361-365. IEEE Region 10 International Conference on Computers, Communications and Automation, Beijing, China. [77] Gupta, P. and Alleyne, A. 2005. Centralized and Decentralized Powertrain Controllers for an Earthmoving Vehicle. 2005 American Control Conference. Portland, Oregon, USA. [78] Hirano, H., Ohba, K. 2001. A Recent Saved Energy Type of Hydraulic System. Journal of the Japan Hydraulics and Pneumatics Society, pp. 225-230. [79] Kakuzen, M.; Hayashi, N. and Fujioka, J. 1988. Automatic control for hydraulic excavators. (in Japanese). Kobe Steel, Ltd Research and Development. July 1988, Vol. 38, No. 3, pp. 14-17. [80] Montgomery, A. and Alleyne, A. 2006. Optimizing the Efficiency of Electro-Hydraulic Powertrains. Proceedings of IMECE2006, pp. 1-9 (2006 ASME International Mechanical Engineering Congress and Exposition), Chicago, Illinois, USA. [81] Yamada, H., Shiozaki, S., Matsuyama, H., Muto, T. 2005. Energy Saving System for Hydraulic Excavator (Simulation of Power Assistant System with Accumulator). 2005 The 6th JFPS International Symposium on Fluid Power, Tsukuba 2005. Tsukuba, Japan. [82] Zhang, R., Alleyne, A., and Prasetiawan, Eko. 2002. Modeling and H2/H-infinity MIMO Control of an Earthmoving Vehicle Powertrain. Journal of Dynamic Systems, Measurement, and Control, December 2002, Vol. 124, pp. 625-628.11D. References: Control and Automation of Mobile Hydraulic Machines [83] Ahn, K., Song, I., Jo, Y., Yang, S., Lee, B., Yun, S. 2002. Development of Force Reflecting Joystick for Hydraulic Excavator. 2002 The 5th JFPS International Symposium on Fluid Power, Nara 2002. Nara, Japan. [84] Cannon, H. and Singh, S. Models for Automated Earthmoving. Proceedings, International Symposium on Experimental Robotics, March 1999. [85] Kato, H., Yamada, H., Muto, T. 2002. Master-Slave Control for a Tele-Operation System of Construction Robot (Improved Method of Control Compared with a Variable-GainSymmetric-Position). 2002 The 5th JFPS International Symposium on Fluid Power, Nara 2002. Nara, Japan. [86] Kovanen, J. and Handroos, H. 2001. Adaptive Open-Loop Control Method for a Hydraulically Driven Flexible Manipulator. 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Como, Italy. [87] Kovanen, J. and Handroos, H. 2001. Dynamic Behaviour Based on Novel Open-Loop control Method a Log Crane. 2001 The 7th Scandinavian International Conference on Fluid Power. [88] Lawrence, P. D., et al. 1995. Coordinated and Force Feedback Control of Hydraulic Excavators. Fourth International Symposium on Experimental Robotics, ISER ’95. Stanford, California. [89] Leger, C., Rowe, P., Bares, J. Boehmke, S., Stentz, A., Obstacle detection and safeguarding for a high-speed autonomous hydraulic excavator. Proceedings of SPE Vol3525, Boston, MA 1998. [90] Linjama, M. 1998. The Modeling and Actuator Space Control of Flexible Hydraulic Cranes. Doctoral Thesis, Tampere University of Technology. [91] Liu, Y. and Handroos, H. 2000. Control of a Hydraulically Driven Flexible Manipulator Using Sliding Mode. ASME, The 2000 International Mechanical Engineering Congress & Exposition. Orlando, Florida. [92] Liu, Y. and Handroos, H. 2003. Modeling and Control of a Manipulator with Hydraulic Actuators. 2003 ASME International Mechanical Engineering Congress & Exposition, Washington D.C. [93] Mikkola, A. and Handroos, H. 1996. Modeling and Simulation of a Flexible Hydraulicdriven Log Crane. Preprints of 9th Bath International Fluid Power Workshop. [94] Minamoto, M., Matsunaga, K., Shinohara, M., Kawasaki, H., Yoshinaga, K. 2002. Development of Remote Controlled Robot for Construction Machine. Transactions of VRSJ, Vol. 7, No. 1, pp. 9-14. [95] Morita, T. and Sakawa, Y. 1986. Modeling and Control of a Power Shovel. Trans. Of the Society of Instrument and Control Engineers, Vol. 22, No. 1, pp. 69-75. [96] Muhammad, A., Mattila, J., Siuko, M., Vilenius, M. 2005. Experimental Comparison of Tele-Operation Schemes for Hydraulic Manipulators. 2005 The 6th JFPS International Symposium on Fluid Power, Tsukuba 2005. Tsukuba, Japan. [97] Rocke, D. J. 1995. Automatic Excavation Control System and Method. U.S. Patent No. 05446980, Issued September 5, 1995. [98] Rouvinen, A. and Handroos, H. 1997. Robot Positioning of a Flexible Hydraulic Manipulator Utilising Genetic Algorithm and Neural Networks. M2VIP, Towoomba, Australia. [99] Rowe, P. 1999. Adaptive Motion Planning for Autonomous Mass Excavation. PhD Thesis, CMU-RI-TR-99-09. [100] Sahm, W. C. 1991. Automatic Excavation Control System and Method. U.S. Patent No. 05065326, Issued November 12, 1991. [101] Seo, W., Kim, S., Lim, T., Yang, S., Lee, B., Ahn, K. 2002. A Study on Trajectory Tracking Control of Field Robot Using Model Reference Adaptive Control. 2002 The 5th JFPS International Symposium on Fluid Power, Nara 2002. Nara, Japan. [102] Seward, D. 1992. LUCIE – The Autonomous Robot Excavator. Industrial Robot International Quarterly, Vol. 19, No. 1, pp. 14-18. [103] Shi, Xiaobo. Lever, Paul S., Synthesis of Tactical Plans for Robotic Excavation, PhD Thesis, Singh, CMU-RI-TR-95-27, 1995. [104] Singh, S., 1997. The State of the Art in Automation of Earthmoving, ASCE Journal of Aerospace Engineering, Vol 10, #4, October, 1997. [105] Singh, S., 2002. The State of the Art in Automation of Earthmoving, 2002, Workshop on Advanced Geomechatronics. [106] Song, B. and Koivo, A.J. 1995. Neural Adaptive Control of Excavators. Proceedings of the Intelligent Robots and Systems Conference, Pittsburg, PA. [107] Stentz, A., Bares, J., Singh, S., Rowe, P. 1999. A Robotic Excavator for Autonomous Truck Loading. Autonomous Robots, Vol. 7, No. 2, pp. 175-186. [108] Wang, J. A. and Fei-Yue 1996. Experimental Robotic Excavation with Fuzzy Logic and Neural Networks. Proceedings of the 1996 IEEE International Conference on Robotics and Automation. [109] Yamada, H., Mukota, S., Zhao, D., Muto, T. 1998. Construction Telerobot System with Virtual Reality (Development of a bilateral construction robot). Proc. of VSMM98, Vol. 1, pp. 152-157. [110] Yamada, H., Muto, T., Ohashi, G. 1999. Construction Telerobot System with Virtual Reality (Development of a bilateral construction robot). European Control Conference ECC’99, CD-ROM. [111] Yamada, H., Muto, T., Ohashi, G. 1999. Development of a Telerobotics System for Construction Robot Using Virtual Reality. European Control Conference ECC’99, CDROM. [112] Yamada H. and Muto T. 2003. Development of a Hydraulic Tele-Operated Construction Robot Using Virtual Reality – New Master-Slave Control Method and Evaluation of a Visual Feedback System. International Journal of Fluid Power, Vol. 4, No. 2, July 2003, pp. 35-42. [113] Yang, S., Lee, M. C., Lee, M. H., Arimoto, S. 1998. Measuring System for Development of Stroke Sensing Cylinder for Automatic Excavator. IEEE Trans. Industrial Electronics, Vol. 45, No. 3, pp. 376-384. [114] Yoshimura, T. and Etokoro, K. 1992. A Simulation Study of Leveling Control by Hydraulic Shovels. Journal of JSME, Vol. 58, No. 554.