5.1. The Public Stations
advertisement

Explaining How Submarines Perceive their Surroundings: A Museum
Installation
Emmanuel Frécon, Olov Ståhl, Jonas Söderberg, Anders Wallberg
Swedish Institute of Computer Science
Box 1263
SE-164 29 Kista
Sweden
{emmanuel, olovs, jas, andersw}@sics.se
Abstract
Under water, submarines are blind and rely heavily
on their sonar system to detect vessels and animals in
their surroundings. We describe a museum installation
that places the public into a cramped space to explain
the technical and psychological process that sonar
operators undergo. The installation is composed of
several coupled interactive stations offering different
perspectives onto a virtual environment representing a
part of the Baltic Sea. The virtual environment and its
presentation within the installation are implemented as
an application of the DIVE research toolkit. The
installation has been on display in several museums on
a daily basis for almost a year. We describe the
technical solutions that we have employed to ensure
stability of the installation and some of our learning.
1. Introduction
This paper describes the design and implementation
of a museum installation. This installation illustrates
how a submerged submarine uses sound to gather
information about its surroundings. A submarine under
water is more or less blind and relies heavily on its
sonar system to detect other vessels. Although the
periscope can be used to spot surface vessels, its range
is limited (a couple of miles) and its use also increases
the risk of the submarine being detected. A sonar on
the other hand can pick up sounds from objects
hundreds of miles away. To make this ambivalence
clear to visitors, the installation relies heavily on sound,
using a soundscape consisting of authentic underwater
recordings of a range of different types of vessels.
The installation is a collaboration between SICS and
the Swedish national maritime museums and is part of a
long-term touring exhibition to celebrate the centennial
of the Swedish submarine force. The installation
described here has been on display for about a year,
touring between a number of museums across Sweden.
Technically, the installation is an application based on
the Distributed Interactive Virtual Environment (DIVE),
a research prototype for the development of virtual
environments, user interfaces and applications based on
shared 3D synthetic environment (see [2] [3] [4] and
[5]).
Logically, the installation is based on a shared
virtual environment that represents the southern part of
the Baltic Sea. Within this environment navigate a
number of different vessels: the submarine used for the
purpose of the explanation and a number of boats and
other objects. The installation shows this virtual
environment from within five very different
perspectives at a number of publicly accessible and
interactive stations. One station takes the form of an
interactive nautical chart. A second station is a digital
periscope. The third station alternatively visualises the
direction of incoming sonar waves onto the submarine
and an identification process of audible nautical
objects. These three stations are complemented by a
surround sound system that renders the sound of all
objects virtually in the vicinity of the submarine.
2. Motivation
The submarine installation has been on constant
display to the public for long periods of time. It is
routinely started during the mornings and switched off
at museum closing time. The challenge of taking a
research prototype such as DIVE into such a stringent
environment the major motivation for our involvement
in the project. Later on we describe a number of more
detailed requirements that the installation have had. We
also present the technical solutions that we have
employed to minimise risks and maximise user
experience at each station while still utilising the
different perspectives on a single shared environment
and providing cues to cross-reference these.
In practice, there were two different actors involved
in ordering the installation. Once we had recognised
this, we looked into using participatory design
strategies when designing the installation and the
components that it would include. This resulted in a
more concerted exhibit where the requirements of all
parties were taken into account. We have previously
used such strategies in a number of projects and these
have shown the importance of the dialogue that occurs.
Typically, collaboration in shared virtual
environments assumes that each participant sees the
same content, still from a different perspective.
However, earlier experiences in 2D interfaces have
shown that this is not totally adequate and this has led
to the introduction of “subjective views” ([6] and [7]).
These are usually put in the context of fully navigable
environments and result in applications where the view
onto the environment is tweaked depending on the
participants roles. Previous experience with an
installation called the Pond [1] had shown us the
importance of shoulder-to-shoulder collaboration.
When designing the submarine installation, we wished
to explore whether these perspectives could meet.
Consequently, we opted for a strategy that would be
based on a shared virtual environment, without any
representation of participants, without any navigation
and with perspectives so different that the notion of
“sharing” almost disappears. The technical challenge
has been for us to see whether our system, which is
highly tuned for navigable shared environments, could
successfully be used in such a different context.
3. Background and Related Work
The ICE laboratory has a long tradition in building VRbased applications that uses 3D virtual worlds for
information presentation and exploration. The Web
Planetarium, a three-dimensional interpretation of
HTML structures in the form of a graph [13], the
Library Demonstrator, an information landscape
constructed from the contents of an online library
database [12], and the Pond, an aquatic environment
where database query result are presented as shoals of
water creatures, are three examples of such
applications. All of these applications has been built
using distributed VR-systems, where the application
process shares a virtual world with visualiser processes
that present the world, including the application
objects, to users.
Periscope-like devices for information presentation has
been used in several projects. In [15], an application is
described where users are able to experience a
historical world (including sounds) using a periscope.
Another project [14] uses a periscope in a woodland
setting to present QuickTime movies to children that
illustrates various aspects of how the wood changes
character over a season and how this affects some of its
inhabitants.
4. Requirements
The strongest requirement for the technological
implementation was the high degree of reliability that
the system would have to achieve. Bringing in a
research prototype into the picture to solve the task is
not a straightforward solution. However, years of
development have made us confident in the increasing
stability of the DIVE system and its viability as a more
industrial and robust platform. Actually, the successful
realisation of this very installation has given us even
more confidence in the readiness of the system for
more demanding applications.
This requirement on reliability was dubbed by the
nature of the project as a public installation.
Consequently, the different stations have to explain
enough without any need to actually be explained. We
attempted to design the stations, the interaction and the
application behind them as robustly as possible. While
the different stations are designed for a few individuals
gathering around them, we wished that other passing by
individuals would be able to understand what was
going on and to learn from this experience.
Also, during the design process we had the
requirement to provide an installation that would
explain how it was to be in a submarine and how
a submarine perceived its environment. Therefore
the experience should be as real as possible, while
still being explanatory enough. An example of
this thin balance between realism and didacticism
is the sea map. It is used very seldom for the purpose
of detection and recognition in real situations.
However, it acts as a central gluing and explaining
artefact in the installation.
5. The Installation
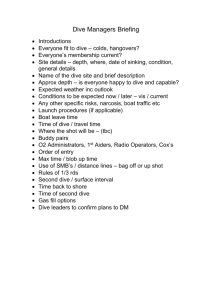
The installation room is intended to represent a
submarine, submerged somewhere in the Baltic Sea. A
nautical chart displayed on a plasma screen at the
Figure 1: A view of the installation in Malmö.
There the space also allowed for two back
projection screens, one on each side of the
room, showing a looped recording of the
forward and aft view of the control room of a
Swedish submarine.
centre of the room shows the current position of the
virtual submarine. The physical setup of the installation
has been slightly altered for each of the museums
visited so far to make best use of the available space.
However, the content and user experience have
remained more or less similar. The basic idea has been
to create a somewhat cramped space reminding visitors
of the restricted space aboard a submarine. In the open
hall of ”Teknikens och Sjöfartens hus” in Malmö, this
meant having custom made walls and roof (see Figure
1). In Gothenburg at the Göteborg Maritima Centre the
exhibition was built on the lower deck of a lighthouse
boat, which added a lot to the atmosphere but also
created a few problems for the setup (see Figure 3).
5.1. The Public Stations
The large-scale visual experience of the exhibition
is driven by four wall mounted 40-inch plasma
displays, one on each wall. In the room are also two
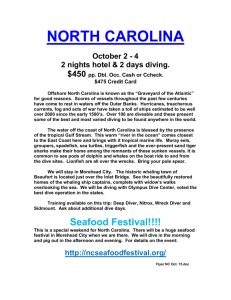
Figure 2: An example screen shot of the
interactive chart.
Figure 3: In Gothenburg, the installation was
built in a more confined space.
“hands-on” interactive stations. The first is an almost
horizontal 21-inch touch screen display containing an
interactive chart covering a part of the Baltic Sea south
of Stockholm including the north tip of Gotland. The
second interactive station is a digital periscope. These
can be seen respectively to the right and the left of
Figure 3. Screen dumps of the applications running at
these stations can be respectively be found in Figure 2
and Figure 4. The periscope presents a graphical view
of the ocean surface at the position of the submarine,
and can be rotated to look for ships in all directions.
The periscope also provides zoom and tilt-angle
controllers much like on an actual submarine. Ships
that are fairly close to the submarine (within a couple
of miles) will be visible as 3D objects moving slowly
through the oceans waves.
Two of the plasma displays mirror what is seen in
the periscope and in the nautical chart podium to allow
groups of people to experience what is on display. The
remaining two plasma displays shows an underwater
scene of the submarine with its sonar sensors and the
Figure 4: An example screen shot of the view
seen from the digital periscope.
Figure 5: A screen shot from the sonic wave
visualisation application.
Figure 6: Alternatively to the view of the
submarine and the sound waves, the display
also
shows
additional
information
in
connection with object identification.
sound environment it is in. Incoming sound waves are
displayed as colour-coded circles approaching the
submarine, as shown in Error! Reference source not
found.. During a user triggered sound analysis these
displays will also show frequency spectrum, sonar
operator video and eventually the identified vessel, as
shown in Figure 6.
An important part of the installation is the computer
controlled 8-channel sound system responsible for
rendering the soundscape. Eight loudspeakers are
evenly spread out around the room making it possible
to simulate sounds coming from all directions.
indistinguishable. The selection of individual sounds is
intended to illustrate the way that a submarine sonar
operator works. By isolating and analysing the sounds
one by one, indistinguishable sounds become
distinguishable and thus hopefully identifiable.
Although the installation focuses on why sounds are
so important to submarines, we also wish to point out
that the sounds that are mostly interesting are the ones
that are caused by vessels of various kinds. To make
this point clear the installation includes a digital
periscope where the visitors are able to see the ships
that are the sources of the sounds heard in the speaker
system. By looking at a particular ship in the periscope
and selecting the corresponding symbol on the nautical
chart, a visitor is thus able to see the ship and at the
same time hear the sound that it emits under water.
Visitors will also encounter tools like BTR (Bearing
Time Recorder) and LOFARgram (“waterfall”
frequency spectrum diagram). These are used aboard
modern submarines.
5.2. Intended User Experience
The installation is intended to give the visitors an
understanding of the importance of sound for a
submarine to detect vessels in its vicinity but also far
away. Via the eight channel sound system, the visitors
are presented with a cacophony of sounds coming from
all directions, representing a multitude of objects
(vessels, animals, etc) surrounding the submarine. Via
the touch sensitive nautical chart, visitors are able to
select symbols representing these sound-emitting
objects. When such a symbol is selected, all other
sounds will fade away and the selected sound will be
played in isolation. During this time the visitors are
able to experience the individual characteristics of this
sound, be it a seal, a small boat with an outboard
motor, or a large tanker. By selecting different symbols
(and thus sounds) the visitors are able to discover that
different types of vessels (animals) produce quite
different sounds. When a selected sound has been
played for a short while, all object sounds will start
again, making the previously selected sound
5.3. Design Process and History
In 2000, our lab designed an experimental
collaboration tool called the Pond as part of the EU
project eSCAPE. The Pond is composed of a 50 inches
plasma screen with a touch surface, surrounded by four
speakers and framed in an eye-catching wooden case.
The screen shows the interior of a pond where
information from databases or the Internet is
represented as animated flocks of swimming creatures.
Users gather around the table-like surface to surf,
gather or exchange information. The design concept of
the Pond was based on eye-to-eye contact and
shoulder-to-shoulder
collaboration, coupled to
unencumbered physical interaction. User studies have
shown that the Pond stimulates an alternative group
behaviour where entertainment plays a crucial role and
leadership is less prominent.
The Pond became rapidly a media attraction and
was shown in several trade fairs. The first curator of the
Swedish national maritime museums contacted during
one of these fairs. Inspired by the artefact, he wanted to
discuss ideas for a coming exhibition around
submarines. This first contact developed to a series of
meeting with his team to discuss what an installation
would have to mediate.
The global understanding that emerged from these
meetings was that visualisation would form the
essential part of the installation. Under the surface, a
submarine is essentially blind. Short distances can be
overcome with the periscope, but this is useless for
navigation or search missions. Furthermore, for secrecy
reasons a submarine shall not be seen during missions.
However, a submarine is able to listen to its
surroundings in details and with great precision. The
acoustic information from the sonar is shown aboard in
two different ways: the bearing of the acoustical object
and graphical frequency curves. Using this information
the operator builds an inside representation of how the
surroundings and the moving acoustic objects look like.
We were commissioned to visualise this technological
and psychological process to the public.
Once our assignment had been cleared out, we
started to design how the installation would look like
and show. We envisioned a dark room with projection
surfaces covering two of its sides. In the middle of the
room would stand a touch-sensitive console. From this
console, visitors would be able to manipulate an
articulated arm with a projector on its end able to reach
any point of the projection surfaces. An interaction
with the touch surface of the console would send an
active sonar pulse and the projector would diffusely
show its respective place on the projection surface.
Several interactions at the same location would clarify
the picture and pressing somewhere else would
“illuminate” a new area. We imagined that visitors
would thus be able to visualise a virtual underwater
landscape. The console would also show simple
navigation controls so as to be able to visit new virgin
territories. We also worked with the idea of painting
the projection surfaces with phosphorescent paint so
that the parts of the landscapes that would so be
discovered would not disappear at once but remain for
a while and slowly attenuate. The whole installation
would be complemented by an acoustic landscape that
would work in a similar manner. Every geographical
area would correspond to a musical theme, which could
be discovered in pace with the sonar pulses and
developed through the orchestration of more and more
parts and tunes.
We presented our ideas to our contact group and
they were enthusiastic about the concept. We produced
a video with simulations and animations that would
illustrate the ideas. Finally, together with the curator we
presented all the material and ideas at a meeting with a
reference group from the navy, composed of retired
navy officers. This group reacted very negatively to the
concept: they questioned our participation, our
presence, the competence of the museum, the project
leadership, etc. It is during that meeting that we
understood that exhibition was commissioned by two
different entities and that we would not be able to
implement our concept.
The objective part of the criticism was geared
towards two problems. Submarines have no windows.
Therefore, showing something outside of the submarine
is inadequate and can be misleading. Also, submarines
almost never use active sonar pulses. All the film
sequences showing torpedo approaching a submarine
are incorrect. Using an active sonar means exposing the
submarine and thus submarines simply stand still and
listen, being almost impossible to detect.
We had to start again from scratch. We decided to
use in parts the methods for participatory design that
we had inherited from the i3/ESE project KidStory.
Together with the first curator, we created our own
reference group. The first members were a group that
records underwater sounds for the Swedish navy. They
later gave us the authentic sonar sounds and frequency
analysis that we used in the final installation. The
second members were a group that works with
underwater acoustic with a focus on submarine hunt.
They explained to us the heterogeneous environment
formed by the Baltic Sea and the different salt and
temperature layers that compose it. The last member of
our reference group was an active submarine captain
who actually knew how modern submarines were
operated nowadays.
We operated a series of meetings with these three
different groups of people separately. We alternated
requests for information that we needed for the
installation and sessions where they could freely tell us
how they would design the installation. Slowly we
aggregated all information and designed a new concept
with the first curator. We had finally understood that
the real challenge of this project consisted in finding
the right balance between on one side the requirements
for realism and authenticity that the navy had and, on
the other side the requirements for experience and
pedagogical clarity that the museum had.
Once we had developed our new concept we took
again contact with the active captain and listened for
his comments. As the initial reference group, he wanted
in a first phase that visitors would enter an installation
that was a submarine look alike as much as possible.
However,
he
progressively
understood
the
requirements that the museum had. The captain was
also present during a new meeting with the initial
reference group. His presence was key to our success
and to the decision to start producing the installation
that is described in this paper.
User
Input Devices
Output Devices
Rendering
Audio and Video i/o
MIME
Tcl Scripting
Event System
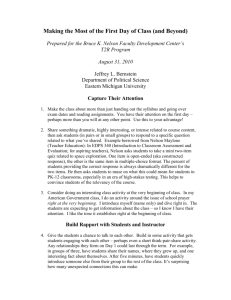
6. DIVE
DIVE is a long-established system for CVE research
prototyping (see [2] [3] [4] and [5]). An overview of
the structure of the system is given in Figure 7. At the
conceptual and programming level, DIVE is based on a
hierarchical database of objects, termed entities.
Applications operate solely on the scene-graph
abstraction and do not communicate directly with one
another. This technique allows a clean separation
between application and network interfaces. Thus,
programming will not differ when writing single-user
applications or multi-user applications running over the
Internet. This model has proved to be successful; DIVE
has changed its inter-process communication package
three times since the first version in 1991, and existing
applications did not require any redesign.
While the hierarchical model is inherited from
traditional scene graphs, as used in the computer
graphics community, the DIVE database is semantically
richer. For example, it contains structures for storing
information about other users, or non-geometric data
specific to a particular application. In DIVE, the
database is partially replicated at all participating nodes
using a top-down approach, i.e. mechanisms are
offered to control the replication of sub-branches of a
given entity.
In DIVE, an event system realises the operations and
modifications that occur within the database.
Consequently, all operations on entities such as
material modifications or transformations will generate
events to which applications can react. Additionally,
there are spontaneous and user-driven events such as
collision between objects or user interaction with input
devices. An interesting feature of the event system is its
support of high-level application-specific events,
enabling applications to define their content and
utilisation. This enables several processes composing
of the same application (or a set of applications) to
exchange any kind of information using their own
protocol.
User
Interface
3D i/o
Database
Distribution
SRM Mechanisms
Network
Figure 7: The different modules that compose
the DIVE system, together with their interfaces.
Most events occurring within the system will
generate network updates that completely describe
them. Other connected peers that hold a replica of the
concerned entities will be able to apply the described
modification unambiguously. Network messages are
propagated using the multicast mechanisms that are
built in the system. DIVE uses a variation of SRM
(scalable reliable multicast [8]) to control the
transmission of updates and ensure the consistency of
the database at all connected peers. The SRM approach
requires the transport layer to be able to ask the
application (in this case DIVE as a whole) to regenerate
updates if necessary. Update regeneration is necessary
when gaps are discovered in the sequence numbers that
are associated with every entity in the database. Gaps
imply that network messages must have been lost along
the path from a sender to one of its receivers. In
addition it is possible to access any document using
more common network protocols (HTTP and FTP),
and to integrate these documents within the
environment by recognizing their media types (such as
VRML, HTML, etc.)
In any application, the content of the database must
be initialised. DIVE uses a module that manages several
three-dimensional formats and translates them into the
internal data structures that best represent their content.
Usually only one peer will load, and parse, a particular
file and the resulting entity hierarchy will be distributed
to other connected peers through a series of (multicast)
updates that describe the resulting entities.
DIVE has an embedded scripting language, Tcl,
which provides an interface to most of the services of
the system [9]. Scripts register an interest in, and are
triggered by, events that occur within the system. They
will usually react by modifying the state of the shared
database. Moreover, these modifications can lead to
other events, which will possibly trigger additional
scripts. A series of commands allow the logic of the
scripts to gather information from the database and
decide on the correct sequence of actions.
For animations, DIVE integrates the notion of key
frames that has been made popular by VRML. The idea
is to provide a number of animation keys in the form of
transformations at key points in time, together with the
time that should elapse between key frames. As time
goes by, intermediate positions and orientations are
interpolated between key frames. Time objects can be
associated to the hierarchy in various places to
simultaneously control the animation of a number of
objects.
Animation information is part of the distributed
database. Since animations described in such a way are
uniquely dependent on time, their execution can be
performed locally to each process and will not lead to
any network traffic. Operations for starting, stopping or
modifying animations will be propagated following the
same principles as any other distributed data. These
operations are also interfaced at the Tcl level, allowing
for scripts to control animations.
The primary display module is the graphical
renderer. Traditionally, the rendering module traverses
the database hierarchy and draws the scene from the
viewpoint of the user. DIVE also has integrated audio
and video facilities. Audio and video streams between
participants are distributed using unreliable multicast
communication. Audio streams are spatialised so as to
build a soundscape, where the perceived output of an
audio source is a function of the distance to the source,
the inter-aural distance and the direction of the source.
The audio module supports mono-, stereo- or quadriphony audio rendering through speakers or headphones
connected to the workstation. Input can be taken from
microphones or from audio sample files referenced by
a URL. Similarly, the video module takes its input from
cameras connected to the workstations or video files
referenced by URLs. Video streams can either be
presented to remote users in separate windows or onto
textures within the rendered environment.
The services described previously are independent
of any DIVE application. Many different DIVE
applications exist that use these services directly. The
DIVE run-time environment consists of a set of
communicating processes, running on nodes distributed
within both local and wide-area networks. The
processes, representing either human users or
autonomous applications, have access to a number of
databases, which they update concurrently. As
described earlier, each database contains a number of
abstract descriptions of graphical objects that, together,
constitute a virtual world. A typical DIVE application
will, upon connection to a virtual world, introduce a set
of objects to the environment that will serve as its userinterface and start listening to events and react
accordingly. One essential application of the system is
the 3-D browser, called vishnu. Vishnu is the
application that gives its user a presence within the
environment. It introduces a new entity called an actor
to the shared environment, which is the virtual
representation of the real user. vishnu renders a visual
and aural space and provides the users with an interface
that allows them to explore and interact with this space.
Vishnu is a default high-level user client.
Users may also be presented with a two-dimensional
interface that offers access to rendering, collaboration
and editing facilities. The interface itself is written
using the same scripting language as offered by the
world database. Consequently, CVE applications can
dynamically query and modify the appearance of the
2D interface. For example, the London Traveller
application [10] exploits this feature by adding an
application-specific menu to the regular interface of the
DIVE browser.
Finally, a MIME (Multimedia Internet Mail
Extensions) module is provided to better integrate with
external resources. It automatically interprets external
URLs. For example, an audio stream will be forwarded
onto the audio module where it will be mixed into the
final soundscape.
DIVE thus specifies a range of different services at
different levels. Programmers can use the core libraries
that provide core services and extended modules that
provide user services. However what tends to
distinguish DIVE from other systems is that there is a
default application, Vishnu, which integrates many of
these services. Vishnu can load a world description file
that, because it allows embedded Tcl scripts, is
powerful enough to describe a very wide range of
environments. Vishnu, the application itself changes
rarely so there is a high degree of interoperability
between instantiations at different users’ sites.
7. Implementing the Installation in DIVE
The submarine installation is implemented using the
DIVE toolkit[] running on three Windows XP 2.4GHz
P4 computers equipped with GeForce4 class graphics
cards. These computers, are networked together
without any connection to the outside world. The
following sections will describe the software
environments, describe some technical issues regarding
the design and implementation as well as experiences
learned as the work progressed.
7.1. The DIVE toolkit
Behöver vi verkligen detta avsnitt?
7.2. Software Design and Implementation
7.2.1. Overview
Kanske något övergripande om implementationen
As described earlier, the installation includes three
networked PCs that each runs a DIVE process. The
processes are responsible for generating the chart,
underwater and persicope scenes and communicate by
sharing a DIVE virtual world.
7.2.2. Subjective views
Since each scene is quite different graphically, the
world mainly serves as a common coordinate system in
which DIVE objects representing the submarine and a
number of sound emitters (surface and underwater
vessels as well as some animals) are placed. The world
itself has no common graphical representation since
each process needs to present it in a different way. For
instance, the chart station will display a sound emitter
as a 2D icon while the persicope will present the same
object using a 3D ship model. This is achieved by
using DIVE's holder mechanism. A holder is a DIVE
scene graph object that may contain the URL of a file
which, once loaded, creates a sub-hierarchy of objects
that are placed under the holder in the graph. By
making the holder a local object, DIVE will distribute
the holder, but not the objects that are placed beneath it
in the scene graph. The result is that each process will
load the file contained in the holder locally, but the
objects that are created as a result will be local to that
process. By placing files with different content but with
the same name on the three PCs, and by setting the
holder URL to the name of these files, each process
will load and create a different sub-hierarchy of objects
under the holder. In the chart process, a sound emitter
object will have a sub-hierarchy of objects that define a
2D icon while in the persicope the same object will
have a sub-hierarchy that looks like a 3D ship.
Thus, all three processes share the non-graphical
objects that define the position and orientation of the
sound emitters, while each process decides individually
how these objects look graphically (via the holder
URL). If a shared object is moved or rotated, all
processes will see the same change in the position or
orientation attribute, but visitors will experience such a
change differently depending on which graphical
station they are using.
7.2.3. Application logic
The DIVE code that implements and drives the
submarine installation can be divided into two
categories, Tcl scripts and C++ plugins. Scripts are
mainly used to handle initialisation and application
logic (i.e., handle user interactions, animations, the
starting and stopping of sounds, etc.) while plugins
implement more “heavy-weight services” that are used
and controlled by the scripts. For instance, there is a
Midi plugin that exports script commands to open a
Midi device and for starting and stopping Midi notes.
This plugin is loaded by one of the Tcl scripts that are
executed by the chart process and is then used to
control the playback of authentic underwater
recordings for various vessels and animals as the
visitors interact with the GUI. Other plugins are used
for rendering of the sea surface in the persicope, for
communicating with the periscope hardware and
updating the view as the persicope is turned, as well as
the generation and display of the BTR tool in the chart
GUI. It is our experience that the use of scripts in
combination with plugins is an efficient way to develop
applications. By using plugins, new features and
services can be introduced into DIVE in a flexible way,
without the need to modify the core system. Each such
plugin can be given an application neutral interface
(including a script interface) which can then be used by
scripts according to the specific application needs. By
using script interfaces we don't need to include
application specific code into the plugins which means
that they can be used for other purposes as well. For
instance, the Midi plugin mentioned above knows
nothing about sound emitter objects and what notes to
play as a result of visitors interacting with the chart
GUI. Had this information been compiled into the
plugin, we would have had to modify the code if we
wanted to use the plugin in some other application.
7.2.4. Process synchronization
The scripts that are executed by the chart, underwater
and persicope processes are mainly devoted to tasks
concerning the local station, e.g., updating the GUI,
starting sounds, etc. However, the scripts also contain
code that is intended to synchronise the three processes
at various points of time. When starting the installation
each day, the museum staff needs to start each process
individually, which is done in a certain order.
However, once started, each process waits for the
others to startup and initialise before it continues to
execute the main run-time logic, i.e., moving ships,
reacting to interactions, etc. This is achieved by each
process creating a property (a DIVE object attribute
that may be created during run-time) in the world
object (a shared object representing the world) and
setting the value of this property to indicate its startup
status. By examining these properties, it's possible for a
process to determine if others have initialised correctly
and if it is ok to continue to execute the main
application logic. Whenever a property is created,
updated or deleted, DIVE generates distributed events
(events which are triggered on all processes connected
to the world in which the property exists) which may be
caught and examined by any of the three processes.
The scripts will therefore set up event subscriptions for
the properties created and updated by the “other
processes”, which allows them to know exactly when
these processes are ready to start. A similar procedure
is used when the installation is shut down each night.
Properties are also used to synchronise the vessel
identification procedure. Whenever a visitor selects an
unidentified sound emitter for identificatioin in the
chart GUI, the chart script sets the value of a specific
property in the emitter object to the value ‘identify’.
This property change will generate a distributed event
which is caught by the underwater script. If no other
identification is in progress, the underwater script then
starts the video sequence that illustrates the work of a
sonar operator. Once the video sequence is finished and
the sound emitter is identified, the underwater script
changes the property value to ‘identified’. This change
will then cause the chart script to change the 2D icon
representing the the sound emitter to an icon that
represents the type of vessel or animal that was
identified.
We have found that using properties in this way makes
it fairly easy to program various process
synchronisation tasks. Although DIVE supports a
message passing API which could have been used to
send synchronisation messages between the processes,
using properties is much simpler since the script
doesn’t need to handle message construction, error
situations (e.g., sending a message to a process that
hasn’t started yet), remebering that a message with a
certain content has been received, etc. Properties are
persistent and distributed automatically by DIVE,
which means that if process A creates a process before
process B is started, process B will still see the
property and its value once started since the property is
part of the shared state. Also, since properties may be
added to objects during run-time, it’s easy to add
application specific object attributes since no C or C++
code in the DIVE system needs to be changed and thus
recompiled.
7.2.5. Sound rendering
The sounds that are used in the installation are
underwater recordings of various vessels and animals,
provided by the Swedish navy. Although DIVE
includes an audio module that supports 3D sound, it
wasn’t able to produce sound for the eight different
channels that was necessary to drive the speakers in the
installation. Instead, we choose to use an external audio
software called Cubase coupled with an software
sampler plugin. Cubase associates the different sounds
with particular Midi notes, which allows DIVE to start
and stop sounds by producing a stream of Midi events.
These events are caught by Cubase by looping Midi
output to Midi input via a cable on the chart station PC.
Cubase is started automatically by the chart
initialization scripts and terminated when the chart
process is shut down in the evenings.
By using a different Midi channel for each speaker, the
chart process is able to select the direction from where
each sound emitter will be heard in the installation
room. By determining the bearing of the sound emitter
relative to the submarine in the virtual world, the chart
process selects the most appropriate speaker and thus
Midi channel for that particular sound. The Midi note
corresponding to a particular sound is determined via a
lookup in a hard coded table in the chart script that
maps vessel types to Midi notes.
Even though the eight Midi channels allows us to
produce sounds in different directions, we also wanted
to change the sound volume to match the distance from
the submarine to the sound emitter. Although the Midi
standard includes a volume controller, it was of no use
to us since it changes the volume on all sounds for a
particular channel. That is, if several sounds where
mapped to the same speaker, they would all be given
the same volume which was unacceptable. Instead, we
use the velocity parameter which is part of the Midi
noteOn and noteOff events, and mapped velocity to
volume in the software sampler used by Cubase. This
allowed us to set different volumes for different sounds
even though they may be placed in the same speaker.
Since most of the sound emitter objects move within
the virtual world, the sounds will change speakers as
the bearing relative the submarine changes. This caused
us some problems at first since the transition of a sound
from one speaker to another was rather noticeable. It
was obvious that eight speakers isn’t good enough
resolution to produce a convincing sound spatialisation.
Each speaker corresponds to a particular sector with its
origin in the submarine position in the virtual world.
When a sound emitter object passes from one sector to
another, the sound will be switched to another speaker.
To avoid the discrete “jump” of a sound from one
speaker to another, the sound was played in both
speakers if an emitter object was close to the border
between two such sectors. The volume used in each
speaker corresponds to how close the object is to the
border line. If the line is crossed, the sound will be
louder in the “new” speaker and it will fade and finally
be turned off in the “old” speaker as the object
continues its journey. The effect is a much smoother
transition of sounds between speakers.
7.2.6. Video rendering
Whenever a visitor initiates an identification process to
determine the type of an unknown sound emitter, three
video sequences are started in the underwater scene to
illustrate the work of a sonar operator. We choose not
to use DIVEs built in video support since it is mainly
focused on distribution of video images, which wasn’t
necessary in this case as the video should only be
presented in the underwater station. Also, since the
display of video in DIVE is based on 3D texturing, the
performance is rather limited, especially if the images
are large. The solution is therefore to use an external
video player which is started by DIVE whenever
needed. The identification process is represented by
three different video sequences, one showing a sonar
operator at work, another a sound frequency spectrum
and a third that shows an animation of the identified
vessel or animal (see figure 6). Whenever the process is
initiated, DIVE starts three different instances of the
video player, each responsible for displaying one of the
sequences. Knowing the length of each video sequence
and using a timer, DIVE will terminate the video player
processes causing the video windows to disappear. This
marks the end of the identification process and the
underwater process will signal back to the chart process
that the identification was successful, as described in
7.3.4.
7.2.7. Periscope
The custom made periscope (see figure 1 and 3)
showing the ocean around the submarine is rigged with
two Leine & Linde 10-bit optical angle encoders for
measuring bearing and angle of elevation. Along with a
number of additional switches these encoders are
connected to a USB-based data acquisition system
called Minilab 1008, providing for a robust, low cost
way of getting the periscope state into the managing
DIVE plugin. The ocean graphics is displayed on an
off the shelf 12 inch LCD display located in the back of
the periscope. The algorithm for generating the wave
simulation is similar to [11]. A patch of waves is
generated and updated through the use of a Phillips
spectrum and inverse FFT. This patch is then tiled to
create the water surface within the frustum. This
algorithm is implemented in a DIVE plugin that uses a
number of hooks into the DIVE renderer for setup,
adjustments, and rendering of the ocean surface. This
plugin is also responsible for simulating curvature of
the ocean surface. DIVE uses Cartesian coordinates
and the curvature is simulated visually by adding an
offset to the position of surface vessels during
rendering based on the distance to the vessel and the
earth’s radius. A third plugin is responsible for
managing the graphics on the periscope hud, e.g.
current bearing, zoom, and elevation information.
7.3. Maintenance
The fact that the installation was going to be on
display in museums for almost two years without any
possibility for us taking part in its daily handling, made
it necessary to also focus on maintainability and
smooth operation. We decided early in the
implementation phase that the system would need to be
restarted each day as opposed to running continuously
for long periods of time. This relieved us from having
to consider nasty issues like power failures but also
meant that someone other than ourselves would have to
be able to start and stop the system without too much
trouble. Assuming that the museum staff were no
computer experts, we came up with a solution that
allows the whole system to be started by clicking on
three desktop shortcuts, and to be stopped by pressing
the Escape key on one of the PC keyboards. Not having
the computers on the Internet ruled out the possibility
of remote maintenance. The main reason for this design
choice was the fact that some of the museums visited
have rules against connecting publicly available PCs to
their network.
Even though the stability of DIVE has increased
over the years, we still had some doubts whether the
system would be able to run without problems week
after week. Even though the tests that we did prior to
the museum “release” indicated no major problems, we
assumed that problems could still occur and therefore
focused on logging. All three processes creates log files
where the application scripts and plugins continuously
write log messages concerning various issues (user
interactions, the state of various plugins and DIVE
modules, etc.) The idea is that if something does indeed
go wrong, the log files will give us an understanding of
the problems and hopefully the history of events that
caused the problem to occur. Each time the installation
is started, log files with unique names are created. This
prevents new log files from overwriting old ones (in
case the museum staff restarts the system after a crash,
causing the “crash log file” to be lost). This also keeps
the size of the log files small which has proven to be
important since the museum staff can use a floppy disk
to retrieve and send us the latest files. Had we used one
log file that would have been appended with each run,
the size would eventually have been in the order tens of
megabytes.
The maintenance issue is also one reason why we
choose to implement the application logic using scripts
and plugins. If any problems would be discovered, we
can easily modify scripts and mail them to the museum
to replace the old ones. With sufficient guidance, the
museum staff can even make minor script changes
themselves.
8. Conclusion and Future Work
This paper...
A user evaluation of the installation is currently
being conducted. Informal results, gathered during a
series of demonstrations before the installation was put
together in the first museum have been very positive...
XXX.. In particular, the periscope....XXXX.
The naturalness of the periscope as an interface
within this scenario has led us to conducting
experiments in using a periscopes as a 3D input and
output device in another application in order to
evaluate its usage as a more generic device. In this
application, which is intended to be used as an
attraction within large and geographically spread public
events such as trade fairs, the periscope is used in two
different ways. The application couples a 3D model of
the event together with networked web cameras that
can be remotely controlled and which picture can be
sent back to the computer driving the periscope. Firstly,
the periscope is used as an exploration device within
the 3D environment of the event. The handles are then
used for tilting and zooming. The web cameras are
represented within the 3D environment. Users can
select one of these cameras by aiming at its
representation and pressing a button. As a result, users
can take full control of the remote camera with the
periscope and receive the stream of images, which
allows them to see as from this location of the event.
We have already demonstrated this application twice
and have received very positive reactions.
9. References
[1] Ståhl O. and Wallberg A., “Using a Pond Metaphor for
Information Visualisation and Exploration”, In Churchill, E.,
Snowdon, D. and Frécon, E. (Eds), Inhabited Information
Spaces, Springer, pp. XXXX, January 2004.
[2] Carlsson C. and Hagsand O., “DIVE – A Multi-User
Virtual Reality System”, Proceedings of IEEE VRAIS’93,
Seattle, Washington, USA, pp.394-400, 1993.
[3] Frécon E. and Stenius M., “DIVE: A Scalable Network
Architecture for Distributed Virtual Environments”,
Distributed Systems Engineering Journal, pp. 91-100,
February 1998.
[4] Frécon E., Smith G., Steed A., Stenius M., and Ståhl O.,
“An Overview of the COVEN Platform”, Presence:
Teleoperators and Virtual Environments, Vol. 10, No. 1, pp.
109-127, February 2001.
[5] Frécon E., “DIVE: A generic tool for the deployment of
shared virtual environments”, Proceedings of IEEE
ConTel’03, Zagreb, Croatia, June 2003.
[6] Snowdon D., Greenhalgh C., and Benford S., “What You
See is Not What I See: Subjectivity in Virtual
Environments”, Proceedings of Framework for Immersive
Virtual Enviroments (FIVE'95), QMW University of London,
UK, pp. 53-69, December 1995.
[7] Smith G., “Cooperative Virtual Environments: lessons
from 2D multi user interfaces”, Proceedings of the
Conference on Computer Supported Collaborative Work'96,
Boston, MA, USA, pp. 390-398, November 1996.
[8] Floyd, S., Jacobson, V., Liu, C., McCanne, S., and
Zhang, L., “A Reliable Multicast Framework for Lightweight Sessions and Application Level Framing”,
IEEE/ACM Transactions on Networking, Vol. 5, No. 6,
December 1997, pp. 784-803.
[9] Frécon E. and Smith G., “Semantic Behaviours in
Collaborative Virtual Environments”, Proceedings of Virtual
Environments'99 (EGVE'99), Vienna, Austria, pp. 95-104,
1999.
[10] Steed A., Frécon E., Avatare A., Pemberton D., and
Smith G., "The London Travel Demonstrator", Proceedings
of the ACM Symposium on Virtual Reality Software and
Technology, London, UK, pp. 50-57, December 1999.
[11] Tessendorf, J., “Simulating Ocean Water”, In
Simulating Nature: Realistic and Interactive Techniques.
SIGGRAPH 2001, Course Notes 47.
[12] eSCAPE Deliverable 4.1., “The Library Abstract
eSCAPE Demonstrator” (eds. Mariani, J. & Rodden, T.),
Esprit Long Term Research Project 25377, ISBN 1 86220
079 3. 1999
[13] Schwabe D., and Stenius M., “The Web Planetarium
and Other Applications in the Extended Virtual Environment
EVE”, Spring Conference on Computer Graphics,
Budmerice, May 3rd-6th 2000
[14] Wilde, D., Harris, E., Rogers, Y. And Randell. C., “The
Periscope: supporting a computer enhanced field trip for
children”, Personal and Ubiquitous Computing, Volume 7,
Issue 3-4, pp. 227-233, 2003
[15] Benford, S., Bowers, J., Chandler, P., Ciolfi, L., Fraser,
M., Greenhalgh, C., Hall, T., Hellström, S.O., Izadi, S.,
Rodden, T., Schnädelbach, H. and I. Taylor (2001).
"Unearthing virtual history: using diverse interfaces to reveal
hidden virtual worlds", in G.D. Abowd, B. Brumitt, S. Shafer
(Eds.): Ubicomp 2001: Ubiquitous Computing Third
International Conference Atlanta, Georgia, USA, September
30 - October 2, 2001. Lecture Notes in Computer Science
2201. Springer-Verlag.