A TS Fuzzy-Neural Network with Dynamic Consequences
advertisement

A Fuzzy Neural Network Based on the TS Model with Dynamic Consequent Parameters and its
Application to Steam Temperature Control System in Power Plants*
Keming Xie
T. Y. Lin
Jianfeng Nan
Department of Automation
Taiyuan University of Technology
Taiyuan, Shanxi, 030024, P.R.China
kmxie@tyut.edu.cn
Department of Mathematics
and Computer Science
San Jose State University
San Jose , CA 95192, USA
tylin@cs.sjsu.edu
Department of Automation
Taiyuan University of Technology
Taiyuan, Shanxi, 030024, P.R.China
ABSTRACT
This paper presents a new fuzzy-neural network based
on the Takagi-Sugeno(TS) model with dynamic
consequent parameters. In the first step, this network
adopts the least-square method for rough-tuning the
consequent parameters; this is an off-line processing. It
then in the second step employs the error
back-propagation to fine-tune the consequent
parameters, which is on-line. The fusion of fuzzy logic
and neural network enabling us to captures the physical
meaning in the model. In summary, the approach is a
semantic oriented approximation of non-linear maps;
the optimization of the parameters is fast and efficient.
The network is applied to the cascade control system of
superheated steam temperature in power plants. The
approach is simulated in MATLAB. The simulation
shows the method is effective; fast in response,
minimal in overshoot, and robust.
Key words Fuzzy neural-network, TS model, Cascade
control, Superheated steam temperature
1. Introduction
There are two characteristics in the fuzzy inference rule
model [1] presented by Takagi and Sugeno (short for TS
model). The first one is that all rules in the model are
expressible by linear equations. This fact allows us to
express the global output of the model in a succinct
mathematical expression. So the classical linear control
method can be easily employed to design the non-linear
controller. The second one is that the partitioning of the
antecedent of the inference rules depends on whether
there is a local linear relation between the input and
output. This makes it easy to use linear model of region
step-down to describe complex global dynamic
characteristics when there is a major change in operation.
Inference methods of fuzzy systems are translated to
neural networks. By using the learning capability of
neural networks, auto-adjustments of antecedent and
consequent parameters can be achieved. The major
advantage of this method is that when the target
information is not adequate, the information of past
experience can be used to structure the neural network.
Using the capability of learning by examples in neural
networks, the fuzzy relationships between the input and
the output can be captured, revised and summarized.
Least square method is fundamental in the classical
identification theory and is widely used. Both the
one-time-completing algorithm and recursive algorithm
can easily be realized in engineering. Its obvious
advantage is strong robust. The back propagation (BP)
learning algorithm can effectively revise the weights and
thresholds of hidden nodes. The feed forward neural
networks (FFNF) presented by the authors in reference [3]
focused on studying the problems of the topological
structure of a network. The present paper will stress the
algorithms of training networks and will present a fuzzy
TS neural network with a dynamic consequent parameters
(DFNN). In this paper, the least square method combined
with the BP is used to train the networks. The new method
is effective; it not only overcomes the drawbacks but also
takes the advantage of the merits of the two methods. First,
this network employs the least square method for
rough-tuning the consequent parameters, which is off-line.
Then, it employs the back-propagation method for
fine-tuning the consequent parameters, which is on-line.
This method has captured physical meaning in models
and achieved an excellent fusion between fuzzy logic and
neural network. This method is a powerful semantic
oriented approximation of non-linear maps; the
optimization of parameters is fast and efficient
2. Topological structure of DFNN
The rules of TS fuzzy model can be expressed as follows
By combining fuzzy systems with neural networks and
making full use of the complimentary nature of two
approaches, fuzzy neural networks are applied to
intelligent control. The essential idea is that the
mechanisms of fuzzy systems are transformed to the
corresponding structures of neural networks [2].
Ri: if x1(k) is A1, x2(k) is A2, x3(k) is A3
then yi a0i a1i x1 a2i x2 a3i x3
i =1, 2, …, R
(1)
where R is the number of rules in the TS fuzzy model,
*Supported by the Visiting Scholar Foundation of Shanxi Province P. R. 1China
x1(k), x2(k), and x3(k) are three input variables, y i is the
output of the i-th rule. A1 , A2 and A3 are fuzzy subset of
x1(k), x2(k), and x3(k) respectively, whose parameters of
membership function are called antecedent parameters,
the coefficients and the constants in equation (1) are
called consequent parameters. The number of fuzzy
granulations, x1(k), x2(k), and x3(k), is determined by
jointly the complexity and precision of the model.
Suppose a group of input vector (x1(k), x2(k), x3(k)) is
given, then the global output y in the TS fuzzy model can
be obtained by the weighted average of the output y i as
follows
R
y i yi
i 1
R
i 1
(2)
i
where y i is determined by the conclusive equation of the
i-th rule, i is the weight of the firing strength layer to
the i-th rule of the input vector, which is calculated by the
equation (3)
ui Λ Aij x j (k)
3
(3)
j 1
where Λ represents the fuzzy minimizing.
uses the fuzzy logic inference based on the fuzzy
granulation of the input space [3]. So the ability of
describing nonlinear characteristics in the model depends
mainly on the granulation method and the precision in the
input space.
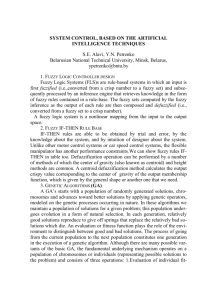
The structure of DFNN network is shown in Fig.1 below,
which consists of 5 layers.
(a) Input layer: Input layer transforms the input vectors to
the next layer, and the i-th neuron is relative to the i-th
element of the vectors, i=1, 2,…, n, where n is the
dimension of the input vectors.
(b) Fuzzy layer: the function of the fuzzy layer is similar
to the one of fuzzy logic controller (FLC). Because every
node in the previous layer responds to N i nodes, the
number of nodes in the fuzzy layer is n N i and every
node has an action of membership function. In this paper,
the Gaussian membership function is employed. There is
a physical meaning to every node which represents a
fuzzy subset that is a linguistic variable such as NL, NM,
NS, NZ, PZ, PS, PM, PL and so on. The antecedent
parameters consist of the mean value and deviation in the
membership function. N i is the number of the fuzzy
partition of the i-th input node in (a) layer.
In order to realize the smooth connection of a local linear
input-output relation in a fuzzy subspace, TS fuzzy model
batch data
dynamic inquiry library
(least square method)
of consequent parameters
on-line data
(error back-propagation)
e
u1
de/dt
edt
Fig.1 Fuzzy TS neural network with dynamic consequent parameters(DFNN)
n
(c) Firing strength layer: Every rule adaptation grade is
calculated in this layer. The number of nodes is
respondent to the total number N w of rules. A neuron
node has a function of the fuzzy logic and computing. If
i(t) represents the adaptation grade of the i-th rule, one
has
i(t) = min {mj(t), …kl(t)}
(4)
where i=1, 2, …,Nw ; m, k=1, 2,…, n, m k; j=1,
2,…,Nm; l=1, 2,…,Nk; Nw= N i .
i 1
(d) Normalized layer: Normalizing calculation is carried
out in this layer:
Nw
αi (t) α i (t) α l (t)
l 1
(5)
(e) Linear combination layer:
ui(t) = aix1(t) + bix2(t) + cix1(t)
is the consequence of every node, which is determined by
the input vector and consequent parameters ai, bi, and ci
*Supported by the Visiting Scholar Foundation of Shanxi Province P. R. 2China
which are evaluated by the learning mechanism. The
neuron in this layer has only one node which acts as a
linear weighted sum. The output is control function:
Nw
u(t) u i (t)α(t)
i 1
J
(6)
In this paper, the control tactics is as follows: data
collected by the cascade control system is used to rough
tune the parameters of a network off-line. A group of data
( x1 , x2 , x3 , y) is collected on line and learn to make the
consequent parameters satisfy the demands on the index
of the performance.
3.1 Rough tuning
In simulating the cascade control system, Collect p group
of data (e, ce, T×e, u), that are teacher signals to train
network, where e, ce, T×e and u are the error, the change
rate of the error, the error integral, and control action. The
matrix equation is Ax=B, where x is the vector composed
by all consequent parameters. Where the dimension of x is
n ×1,the dimension of A and B are P×n and P×1
respectively. The least square method is employed to
minimize ||Ax-B|| 2 , then the least square estimation :
(7)
x * (AT A)1 AT B
1
T
where, AT A AT is the pseudo inverse of A ( A A must
be non-singular). Because there is a large computation in
the equation above and it becomes an ill-conditioned one
when AT A is singular, a recurrence formulae is
employed to calculate the least square solution of x .
Suppose aiT represents the i-th row vector of the matrix A
and biT represents the i-th element in the matrix B, one
has [3]
Si 1 Si Si ai 1aiT1Si (1 aiT1Si ai 1 )
i 0,1,..., p 1 (8)
1
(r (k ) y (k )) 2
2
(10)
and
3. DFNN learning algorithm
xi 1 xi Si 1ai 1 biT1 aiT1 xi
The integral square-error criterion is adopted as
follows:
,
,
x1(k)= e(k), x2(k)= Te(k), x3(k)=(e(k)-e(k-1))/T
(11)
y(k) y(k 1) i
J
(r(k) y(k))sign
μ (k)x1 (k) (12)
a i (l)
u(k) u(k 1)
y(k)- y(k - 1) i
J
(r(k)- y(k))sign
μ (k)x2 (k )
i
b (l)
u(k)- u(k - 1)
(13)
y(k ) y(k 1) i
J
(r (k ) y(k ))sign
(k ) x3 (k )
c i (l )
u(k ) u(k 1)
(14)
where T is sampling period, k is the sampling moment l
is the number of learning iteration x1(k), x2(k), and x3(k)
are the error, the error integral and the error differential
signals respectively ai(l), bi(l) and ci(l) are coefficients
of the rule consequence.
Particularly, the teacher signals here are different from
that in rough tuning. The former are the mapping
relation between the error, the change rate of error, the
error integral and the expected output of the closed
loop control system. One often cannot determine the
expected control tactics to the given the deviation, the
change rate of deviation, and the deviation integral, but
he can presents the expected output response curve. So
in the paper (x1, x2, x3, r) is selected as the teaching
signal, where r is the expected output of the cascade
control system in order to make the characteristics of
the DFNN controller network better. In this process
there is a error propagation from y to u. For the sake of
simplification in simulation, one doesn’t consider any
particular mathematical model instead of the
approximate expression below
y ( k ) y ( k 1)
y (k )
sign
(15)
u( k )
u( k ) u(k 1)
where S i is matrix covariance, the least square solution
x* is xp. The initial values of the consequent parameters
can be determined in advance according to experience
values of the controllers.
The initial values of the matrix of covariance S i can
be determined as follows
where yy k and (k ) are the consequence linear
function value and rule grade. In order to prevent the
denominator from being zero when u(k)=u(k-1) one
take
So = r I
(9)
where r is a larger positive number, I is a n×n unit
matrix . After p group of data being trained, the rough
tune values of the consequent parameters can be
obtained and put its inquiry library
The alternate is feasible because the equation (16) is
equality. Evaluated criterion can be given as function
(10).
If J is less than 0.05 directly apply the model without
any learning. Otherwise a learning is carried out. In
general, the learning times are 3~5,which are related
to the sampling period and the learning rate. Because
the learning process is always controlled within one
3.2. Fine tuning
i
i
y (k )
sign y (k ) y (k 1)(u (k ) u (k 1))
u (k )
*Supported by the Visiting Scholar Foundation of Shanxi Province P. R. 3China
(16)
sampling period, the time of the learning will have an
upper value. That is, although the maximal time of the
learning has been reached. J is still larger than 0.05. At
this moment, the parameters are improved to some
extent and the controller can satisfy the demand on the
quickness of manufactory. The learning of the
antecedent parameters in which the intransitive error
algorithm was used is discussed in detail in reference
[3].
controlled at 540+(5/-10). That is, 530~545 is
suitable and reasonable. Because the superheated
steam temperature object has a large inertia and a
larger delay time, so how to control superheated steam
temperature efficiently is a point for attention. At
present the typical control system pattern of the
superheated steam temperature is the cascade control
system which employs the desuperheating water as the
manipulated variable.
4. Superheater steam temperature
cascade control system
The cascade control system of the steam temperature is
shown in Fig.2, where the main controller employs the
DFNN algorithm and vice controller adopts the PI
algorithm. The steam temperature object is separated
into two fields. G p1 ( s ) is the prior field and G p 2 ( s )
The superheated steam temperature is an important
index in operation of monoblock unit in the power
plants. It has an important thing with the heat
efficiency of a monoblock unit and it will heavily
affect the safe and economic operation in the power
plants. Generally, the superheated steam temperature is
the inertia field [ 4 ] . And
G p1 ( s ) 8 1 15 s 2
G p 2 ( s ) 1.125 1 25 s 3
DFNN
u1
-
-
(18)
d1
de/dt
r
(17)
PI
edt
u2
d2
G p1
G p2
0.1
0.1
Fig: 2
Steam temperature cascade control system with DFNN
5. Simulation
This cascade control system with DFNN algorithm is
simulated in MATLAB. Fig.3 shows the comparison of
two step responses, in which the response 1 and
response 2 represent DFNN algorithm (as main
controller) and PID algorithm (as main controller)
respectively. It is seen from the Fig.3 that the control
performance is improved obviously when DFNN
instead of PID is employed. The former has a zero of
overshoot and the later 0.0954. Fig.4 shows
comparison of the abilities to reject disturbance. In
simulation the disturbance d1 0.01r and
Fig.3 The comparison of step responses for DFNN and
PID
d 2 0.1r when they are entered in 500 second. It can
be seen from Fig. 4 that DFNN has a better ability to
reject disturbance than the traditional PID algorithm.
Fig.4 The comparison of abilities of reject disturbances
for DFNN and PID
*Supported by the Visiting Scholar Foundation of Shanxi Province P. R. 4China
6. Conclusion
The DFNN algorithm presented in this paper
combines the classical least square method with BP
algorithm, not only employs the strong robust of least
square and the clear conception and the precision of BP
algorithm but also overcomes their drawbacks. The
drawbacks existed in the network is a slower
calculation. Although the DFNN can be employed to
improve the control quality in the serial steam
temperature cascade control system. The simulation
shows the method is effective, fast in response,
minimal overshoot, and robust.
References
[1].Takagi, M.Sugeno. Fuzzy Identification of Systems and Its
Applications to Modeling and Control. IEEE Transactions on
Systems, Man, and Cybernetics, Vol.SMC-15, No.1(1985):
116~132
[2] Xie Keming, Zhang Jianwei. A Linear Fuzzy Model
Identification Method Based on Fuzzy Neural Networks.
Proceedings of 2nd World Congress on Intelligent Control and
Intelligent Automation Conferences (CWCICIA’97), vol.1:
316~320
[3] Xie keming, Nan jianfeng A Fast Fuzzy-Neural Feedback
Network and its Application in Modeling. Proceedings of
ICAIE’98, 1998, 499~502
[4] Zhang Yuduo, Wang Manjia. Thermotechnical Automatic
Control System. Beijing: Press of Hydroelectric, 1987: 201-203
*Supported by the Visiting Scholar Foundation of Shanxi Province P. R. 5China