Sample manuscript showing specifications and style
advertisement

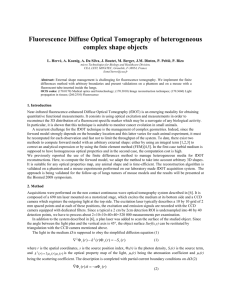
In vivo fluorescence enhanced optical tomography reconstruction of lungs cancer of non immersed small animals L. Hervéa, A. Koeniga, A. Da Silvaa, M. Bergera, J. Bouteta, J.M. Dintena, P. Peltiéa, P. Rizoa a CEA, LETI, MINATEC, Grenoble, F-38054, France; Abstract Fluorescence enhanced diffuse optical tomography (fDOT) is envisioned to be useful to collect functional information from small animal models. For oncology applications, cancer-targeted fluorescent markers can be used as a surrogate of the cancer activity. We are developing a continuous wave fDOT bench intended to be integrated in systems dedicated to whole body small animal fluorescence analyses. The focus is currently put on the reconstruction of non immersed small animals imaged by a CCD camera. The reconstruction stage already corrects the tissue heterogeneity artifacts through the computation of an optical heterogeneity map. We will show how this formalism coupled with the determination of the animal boundaries performed by a laser scanner, can be used to manage non contact acquisitions. The time of reconstruction for a 10 9 laser source positions, 45 40 detector elements and 14 11 14 mesh voxels is typically 10 minutes on a 3GHz PCs corresponding to the acquisition time allowing the two tasks to be performed in parallel. The system is validated on an in vivo experiment performed on three healthy nude mice and a mouse bearing a lung tumor at 10, 12 and 14 days after implantation allowing the follow up of the disease. The 3D fluorescence reconstructions of this mouse are presented and the total fluorescence amounts are compared. Keywords: Medical optics and biotechnology, Image reconstruction techniques, Light propagation in tissues, Fluorescence 1. INTRODUCTION Near-infrared fluorescence-enhanced Diffuse Optical Tomography (fDOT) consists in injecting excitation light in a turbid medium and measuring the outgoing transmitted light and the fluorescence light. From these measurements, by reconstructing the 3D distribution of the fluorescence yield, the technique allows to infer the concentration of the fluorescence marker1 and to give quantitative functional pieces of information which are useful to the pharmacological industry for experiments on small animal models. In particular, if cancer specific markers are used, fDOT can be used to quantify the cancer activity and to evaluate the efficiency of treatments. Theoretically2, to access to a complete knowledge of the medium, temporal capabilities acquisition chains have to be used3-6 which leads to expensive systems and generally limits the number of acquisition channels. In the prospective to make a cost effective tool for biology research applications, we develop a simplified optical bench adapted to continuous wave (CW) acquisitions3,7,8 and a dedicated reconstruction scheme which accounts for the optical heterogeneities of the medium9 and which can be used on arbitrary geometries10. In this article, we first expose the theoretical background of presented fDOT method, i.e. the propagation model used and the reconstruction scheme employed to compute the optical heterogeneity map and the fluorescence map, and we show how the method is adapted to address non contact acquisitions. In the second part, we present the optical tomographer developed in our lab and an in vivo non contact validation experiment to evaluate our approach. 3D fluorescence reconstructions between three healthy mice and a diseased mouse bearing a mammary murine lung tumor are compared and the follow up of the evolution of the cancer (at 10, 12 and 14 days after implantation) of the diseased mouse is shown. 2. THEORY 2.1 Forward model of diffuse optical imaging As shown on Fig. 1, fDOT experiments consist in injecting light at the wavelength ex into a diffuse medium. It generates a diffusive wave (excitation) which propagates inside the medium and excites the markers fluorescence. These markers create a second diffusive wave at the fluorescence wavelength (emission) em with an intensity proportional to the incident wave and to the markers concentration. In the transmission geometry, a laser source scans one side of the studied medium, and the transmitted signals at the wavelengths ex and em are recorded at the opposite side by a CCD camera. Excitation signal Fluorescence signal Detector Fluorophore (em = 790nm) z 1/’s y Laser source (ex =690nm) x Fig. 1. Geometry of a transillumination fDOT acquisition. A laser is used as a point source at a side of the turbid medium. The transmitted light at the excitation and the emission wavelengths is detected at the opposite side. Here, the light propagation is modeled by the following Helmoltz equation: 2 k 2 Φ(r) S (r) (1) where k2=3’sa is the optical heterogeneity9, with ’s the reduced scattering coefficient, a is the absorption coefficient, S(r) is the source term and Φ (r ) is the photon density at position r. In our case, as the density wave is generated by a laser source, S(r) is proportional to a Dirac function. The boundary effects 11 are modeled by the partial current boundary condition: Φ (r ) Φ (r ) n where (2) n is the normal vector to the boundary outward oriented, and is related to the index mismatch at the boundary. Given a k2 map, we define the Green’s function G(r0,r) which describes the propagation of light in the diffuse medium from a point source r0 to a destination point r by: 2 k 2 G (r0 , r ) (r0 , r ) (3) 2.2 Heterogeneity reconstruction By using (2) and (3) and since the sources (indexed by s) are modeled as Dirac delta functions (positioned at 1/’s inside the medium, see Fig. 1), the excitation density wave is given by the formula: Φ ex (rs , r) ˆG(rs , r) where rs is the position of the source s, r is a position inside the diffuse medium and (4) ̂ is a photometric factor related ex to the laser power. Thus, U (rs , rd ) , the excitation wave detected by the detector d at location rd is: U ex (rs , rd ) G (rs , rd ) (5) where is a global factor which takes into account the laser power and the detection efficiency and has to be calibrated on a reference homogeneous phantom through an auxiliary experiment. For a given heterogeneity map k2 associated to its corresponding Green’s function, the Rytov expansion is: U ex (rs , rd ) G(rs , r)k 2 (r)G(r, rd ) log dr G(rs , rd ) G(rs , rd ) (6) where k (r) K (r) k (r) with K2 being the actual heterogeneity map which generates the experimental measurements. By solving k2 from (6), k2 is updated from the excitation measurements but since the Green’s functions depend on k2, multiple iterations of (3) and (6) must be performed to reach convergence. For our computation, k2 is solved by 8 iterations of ART (Algebraic Reconstruction Technique with a relaxation parameter set to 0.01) and (3) and (6) are discretized by the finite difference method on a mesh grid where the voxel dimensions are:x=2mm,y=2mm and z=1mm. 2 2 2 2.3 Fluorescence yield reconstructions The fluorescence signal U em (rs , rd ) is obtained by considering all the paths source - fluorophore – detector:12 U em (rs , rd ) G(rs , r) X (r)G(r, rd )dr (7) where is the considered turbid medium and X(r) is the fluorescence yield. When the G functions of the system are computed, we perform the fluorescence yield reconstruction by solving a discretized version of (7). Since this system is linear with respect to X, it can be solved directly by using linear algebra tools. We use 15 iterations of ART with its relaxation parameter set to 0.1. 2.4 Non contact handling FDOT measurements are commonly performed on animals immersed into an index matching liquid in order to conform to the “slab geometry”13. However, since the drawbacks of this immersion are numerous (animal heat loss problems, septic problems etc… leading to a low throughput of the machine), we decided here not to use any index matching liquid. To manage the complex shape of the turbid medium and the free space propagation of the light to the camera, we developed a strategy exposed elsewhere10; the border effects are taken into account by an additional increase of the optical heterogeneity around the borders. It is directly obtained during the optical heterogeneity reconstruction. The resulting map compounds the intrinsic tissues heterogeneity and the border effects. In this method, the 3D locations of the projections onto the medium boundary of the detector elements (Fig. 2) used for the reconstructions must be estimated. To obtain these positions, we estimate a part of the top animal surface by the following method: an image (Fig. 3-left) of the small animal is acquired when illuminated by lateral LEDs (Fig. 4). Since the dark regions correspond (see Fig. 3-left) to the background or the regions of contact between the top paddle and the animal, we detect them by histogram analysis. In the region of interest being defined by the source scanning area plus 1mm, the dark pixels corresponds to contact positions. For these pixels, the detectors projections are known but this covered region is generally not large enough to achieve a good sampling for reconstructing the optical heterogeneity and the fluorescence maps. To increase the number of usable projections, we extrapolate the surface by computing the distance D(x,y) to the surface in contact (Fig. 3-right) and estimate the thickness by the empirical formula: T(x,y)=T0(1 -D(x,y)2)0.5 (8) where T0 is the known compression thickness measured with a caliper and is empirically set to 1/0.6cm. CCD array Detection optics Projection of a detection element onto the small animal boundary Top compression paddle Known compression thickness Lateral LED strip Illuminated area ( ) Bottom compression paddle Fig 2. schema of the lateral illumination: the LED illuminates the side of the mouse allowing the detection of the region of contact between the top compression paddle and the small animal. 50 50 100 100 150 150 200 200 250 250 300 300 350 350 400 400 450 450 500 500 100 200 300 400 500 600 100 200 300 400 500 600 Fig 3. Estimation of the small animal boundary. Image acquired during the lateral illumination (left). Distance map to the contact region (right). Since the position errors are compensated by the k2 map (increased values when the surface estimated is not high enough and decreased values otherwise) obtained during optical heterogeneity reconstruction, the surface accuracy is not critical. On simulation, we estimated that the fluorescence yield varies by less than 10% if the surface errors don’t exceed 2mm. To prevent too high errors on the surface geometry, the projections which T(x,y)-T0 are greater than 1 mm are discarded. 3. VALIDATIONS 3.1 Tomographer High sensitivity camera Camera lens Emission filter Mouse support Excitation filter Laser Fig 4. Schema of the tomographer. The experiments presented in this paper were performed with a continuous wave tomographer represented in Fig. 4. The optical system is composed of a solid state laser source (690 nm, 17 mW) for illumination and a CCD camera (Orca EG, Hamamatsu) for detection. The movements of the scanning fibber are driven by two translating plates (Microcontrol) and monitored with a computer. The 12 bit CCD camera is focused at the top surface of the probed object (phantoms or small animals). For each source position, two acquisitions of the transmitted light are carried out at the excitation and the emission wavelengths. The emission signal is obtained by the use of a filter (high pass RG9, Schott). In order to optimize the transmission through the whole animal even in the liver or the lungs area, we chose to use a high wavelength fluorophore, Alexa 700 (Molecular Probes), which emission peak is around 780 nm. To ensure no excitation signal is detected as fluorescence, we decided to use a laser with a wavelength (690 nm) much lower than the fluorophore peak emission (780 nm), despite the low fluorophore absorption efficiency at this wavelength. 3.2 In vivo results The system was validated on a follow up of a living nude mouse bearing a mammary murine lungcancer at 10, 12 and 14 days and three healthy others for comparison. The mice were injected 3 hours before the images acquisitions with 200 l of RAFT (cRGD)4-Alexa700 and anaesthetized and heated by the gazeous system Minerve. The compression thickness was set to 13mm. Before each scan, the compressed area is measured by the lateral illumination procedure (Fig 3). The acquisitions were performed on a regular 10 × 9 sources positions with a 2 mm sampling rate in each direction. This corresponds to roughly 20 mn acquisition time. The acquisitions were discretized on a regular 45 × 40 grid with points spaced of 0.5 mm. The reconstruction mesh used is composed by 14 × 11 × 14 elements with a volume element of 0.2 × 0.2 × 0.1 cm3. Fig. 5 presents the reconstructed volume in the lungs area for the diseased mouse at 10 days (top), 12 days (middle) and 14 days (bottom) after the cancer implantation. The 3D volumes are presented at left and the (xy) projections are shown at right. An increase of the fluorescence yield corresponding to the cancer development is observed. In order to validate that this increase was not the consequence of the repetitive injections, two healthy mice were injected and measured twice with the fDOT instrument (corresponding to the days 11 and 13 of the diseased mouse). In Tab 1 where the integral fluorescence results are summarized, we notice that the fluorescence amount of the diseased mouse is roughly twice higher that the one of the healthy mice, that the fluorescence of the diseased mouse increases with the cancer development and, from the multiple injections performed on the healthy mice H2 and H3, that the fluorescence results are not stained from cumulative effects. Diseased mouse Healthy mice Experiment Day 10 Day 12 Day 14 H1 H2 1st inj H2 2nd inj H3 1st inj H3 2ndinj Fluorescence yield amount 0.071 0.095 0.130 0.035 0.041 0.041 0.040 0.033 Tab 1. Results of the total fluorescence reconstructed inside the volume of interest. For the diseased mouse, we note that the fluorescence increases with the number of days passed since the cancer implantation. For the three healthy mice, H1, H2 and H3, the fluorescence is much lower and does not depend on the number of the injection (first or second) showing that no cumulative effects take place on the measure. 4. DISCUSSION AND CONCLUSION The fDOT technique needs optical heterogeneity corrections for small animal applications since the optical properties of the organs are widely varying14. Theoretically, an optics bench with temporal capability must be used to obtain a complete dataset in order to reconstruct accurately the optical properties of the diffusive medium. Here, since CW data are acquired, a simplified approach is used: a unique k2 map, reconstructed from the excitation measurements is used to model the light propagation in the medium. It primarily represents the optical heterogeneity of the medium (3 a’s), but in the fact, it also accounts for the border effects (decrease of the photon density wave close to the boundaries) and from various model description errors such as the position of the detectors. In order to ease the tasks of the biologists, we developed a protocol without index matching liquid. A compression paddle is still used to partially know the geometry and to enable the projection of the detector elements onto the medium boundary. A lateral illumination is used to materialize the compressed region. An extrapolation of this known region allowed an increase of the measurement dataset. We validated the method on in vivo small animal fDOT measurements performed on a nude mouse injected with RAFT (cRGD)4 fluorescent probe and bearing a mammary murine cancer at 10, 12 and 14 days of its development. As expected, the reconstructed fluorescence yield increases with the cancer development. These results were compared to the reconstruction of the fluorescence yield of three injected healthy mice; we obtained that the level of fluorescence of the diseased mouse was twice as high as the fluorescence of the healthy mice. On the healthy mice, the reconstructed fluorescence yield was shown to have no cumulative effects from one injection to the other, thus validating that the increase of fluorescence observed on the diseased mice was biologically relevant. Future work will be focused on the integration of a laser scanner to measure the boundary of the studied medium to enable more robust fDOT measurements on mice and get rid of the upper compression paddle. 50 100 150 200 250 300 350 400 450 500 100 200 300 400 500 600 100 200 300 400 500 600 100 200 300 400 500 600 50 100 150 200 250 300 350 400 450 500 50 100 150 200 250 300 350 400 450 500 Fig 5. 3D maps of the reconstructed fluorescence yield (left) and their projection on the (xy) plane (right) of the diseased mouse at 10 days (top), 12 days (middle) and 14 days (bottom) after the cancer implantation (same scale). We notice an increase of the reconstructed fluorescence yields with the lung cancer development. REFERENCES 1. R. Weissleder, V. Ntziachristos, “Shedding light onto live molecular targets”, Nature Medecine 9(1), 123-128 (2003). 2. S. R. Arridge and W. R. B. Lionheart, “Nonuniqueness in diffusion–based optical tomography,” Opt. Lett. 23, 882– 884 (1998). 3. R.B. Schulz, J. Ripoll, V. Ntziachristos, “Experimental Fluorescence Tomography of Tissues With Noncontact Measurements IEEE trans. on Med. Imaging, 23(4), 492-500 (2004). 4. R. Roy, A. Godavarty, E.M. Sevick-Muraca, “Fluorescence-Enhanced Optical Tomography Using Referenced Measurements of Heterogeneous Media”, IEEE Trans on Med. Imag. 22(7), 824-836 (2003). 5. A.B. Milstein, S. Oh, K.J. Webb et al., “Fluorescence optical diffusion tomography”, Applied Optics, 42(16), 30813094, (2003). 6. A. Godavarty, E.M. Sevick-Muraca, M.J. Eppstein, “Three dimensional fluorescence lifetime tomography”, Med. Phys. 32(4), 992-1000 (2005). 7. Soubret A, Ripoll J, Ntziachristos V , "Accuracy of fluorescent tomography in presence of heterogeneities: Study of the normalized Born ratio", IEEE Med. Imag. 24(10), 1369-1376 (2005). 8. Ntziachristos V, Weissleder R, "Experimental three-dimensional fluorescence reconstruction of diffuse media using a normalized Born approximation", Optics Letters 26(12), 893-895 (2001). 9. L. Herve , et al., Fluorescence tomography enhanced by taking into account the medium heterogeneity, Nuclear Instruments and Methods in Physics Research A (2006), doi:10.1016/j.nima.2006.10.029 10. L. Herve , et al., Non contact fluorescence optical tomography by means of numerical and analytical approaches, Nuclear Instruments and Methods in Physics Research A (2006), doi:10.1016/j.nima.2006.10.063 11. R. C. Haskell, L. O. Svaasand, T. Tsay, T. Feng, M. S. McAddams, and B. J. Tromberg. Boundary conditions for the diffusion equation in radiative transfer. J. Opt. Soc. Am. A 11, 2727–2741 (1994). 12. M. S. Patterson and B. W. Pogue, “Mathematical model for time-resolved and frequency-domain fluorescence spectroscopy in biological tissues,” Appl. Opt. 33, 1963–1974 (1994) 13. A. Koenig, et al., Whole body small animal examination with a diffuse optical tomography instrument, Nuclear Instruments and Methods in Physics Research A (2006), doi:10.1016/j.nima.2006.10.028 14. W. F. Cheong, S. A. Prahl, and A. J. Welch, "A Review of the Optical Properties of Biological Tissues," IEEE J. Quantum Electronics,26, 2166-2185 (1990)