Tracking of Multiple Marine Mammals by Short or Widely
advertisement

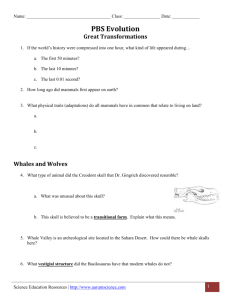
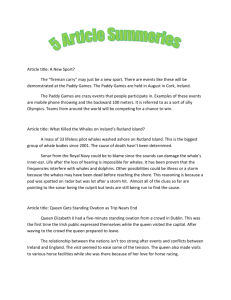
Tracking of Multiple Marine Mammals by Short or Widely Spaced Hydrophones Hervé GLOTIN, Pascale GIRAUDET, Joseph RAZIK, Sébastien PARIS, Xanadu HALKIAS, Faicel CHAMROUKHI, Jean-Marc PREVOT, Julie PATRIS, Frédéric BENARD, Alexandre MONNIN, Fabien LELANDAIS, Régis ABEILLE, Yann DOH, Olivier DUFOUR, Céline RABOUY, Ales MISHCHENKO1 1. Introduction Bioacoustic signaling is a primary mode of communication and exploration for most animals. It enables quick load and transfer of information in order to overcome the reduced visibility and the long distances present in the ocean environment. When animals intend to localise a sound target in presence of competing signals, they may use an effective target's sound features selection from various mixed auditory features. This strategy, also called the auditory feature binding, may play an important role in Marine Mammal (MM) perception. In this chapter we illustrate several of our approaches that are somewhat inspired from this feature binding paradigm, aiming to develop efficient scaled biodiversity survey technologies, using mono or multiple hydrophone arrays. In this chapter, we first present the context of our research, and then some of the original results developed in the past years. We finally provide some perspectives for a possible conservation program of MM using big passive acoustic data. 1.1 Toulon : the Far-West of the PELAGOS Marine Mammals Sanctuary The university of Toulon is located in the west angle of the Marine Protected Area (MPA) Pelagos Sanctuary for Mediterranean MM, covering approximately 84,000 km², comprising the waters between Toulon (French Riviera), Sardinia, and Tuscany (Fig 1). In this area all the cetaceans inhabiting in the Mediterranean sea can be found at regular intervals (Fig 2). It is believed to be the main feeding ground for Fin Whales in the Mediterranean basin. It was established in 1999 and is the first (and currently the only) international MPA in the world. Figure 1 : The Pelagos Sanctuary 1 Our team is placed at the Far-West of the Marine Mammals PELAGOS Sanctuary. Figure 2 : Some of our great meetings in front of our laboratory (the visible coast in the background is Toulon) : a fin whale of nearly 20m long (credit, Giraudet 2012), and a Physeter catodon 12m long (right, credit Prévot 2012). The 10th anniversary of the official birth of Pelagos was celebrated in Toulon in 2013 (Fig. 3), and a movie has been produced by the French television to demonstrate the main MM conservation projects. It includes some of our results (online summary http://sabiod.org/tv), and was presented in February 2013 at the Oceanographic Institute of Monaco (in the same hall where we first met the DCL group in 2005). Figure 3 : (left) The oceanographic museum of Monaco in 2013 for the premiere of the movie on Pelagos, which includes part of our work, in the same hall where we first met the DCL members during the 2nd workshop in 2005 ; (right) The 10th Pelagos anniversary in Toulon Feb. 2013, with G. Sellier (director of Pelagos France and of the PNPC), the research team of the PNPC, some members of GIS3M, WWF, GECEM, the French Ministry of Ecology, Amiral Tanguy, and some of our team members. 1.2 Presentation of our team The team was created in 2003 by Pascale Giraudet and Hervé Glotin, both PhD’s in cognitive science. During her PhD at Grenoble on neurophysiology of mammal olfaction, P. Giraudet developed models of neuronal time coding of odor mixtures. In 2001 she received a tenure position in the biology department of the University of Toulon (USTV). H. Glotin received his PhD on automatic speech recognition and speaker localization, with application to cocktail party speech recognition. Early in his research, he became involved with advanced modeling of marine mammals bioacoustics. In 2003, after a tenure position into a laboratory on syntax and semantics, he joined USTV as an associate professor in computer science and signal mining, where he is now Prof. and leads the Dyni team. In June 2005 we received from O. Adam the call for participation to the localization challenge given at the 2nd DCL workshop : ''How to localize multiple Physeter catodon by passive acoustics''. It was a great opportunity to develop our research and deeply study the wonderful multipulsed biosonar of these species. Our research produced a combinatorial methodology to measure the coherency into the Time Delay of Arrival (TDOA) streams. We then presented our results in the challenge session at the Oceanographic Museum of Monaco : the results for the one whale case were quite similar between the participants, but the challenge was very difficult for the case of multiple clicking whales. However, a few months later, and after a resynchronization of the recording set, we demonstrated that our methodology produces clear results in real time, even in the case of multiple whales. We subsequently patented and published our methodology and its numerous applications. The bioacoustics team grew along the years : F. Bénard-Caudal joined us for his master thesis in 2006, then his PhD in 2007, testing the combinatorial method tracking solution on different arrays, demonstrating its robustness even in short spaced hydrophones (NEMO recordings). Additional master’s students and engineers joined the team (Lelandais, Monnin). Meanwhile S. Paris (expert in estimation) and J. Razik (from speech recognition) joined the team for tenure positions. We also started collaborating with J. Patris, professor in physics for whale sound production model, and J.-M. Prévot engineer at USTV who designs electronic devices for hydrophones and manages our CPU farm (we will have 32 To of bioacoustic recordings by the end of 2013). Two other Phd students joined DYNI : R. Abeille in 2010, and Y. Doh 2011, and F. Chamroukhi, expert in Functional Data Analysis, got his tenure position in 2011. C. Rabouy joined DYNI for her master in dolphin photo-identification. In 2011, X. Halkias joined the team as a senior researcher, for multi-modal classification, including some applications to bioacoustics. Our researches are oriented on information / signal theory and stochastic modeling, with some neurophysiology inspiration, thus we named the global team 'DYNI' for 'information DYNamics & Integration'. Today DYNI is leading the national Scaled Acoustic Biodiversity (http://sabiod.univ-tln.fr ) Big Data Project, which involves five major national laboratories in signal processing, machine learning classification and bioacoustics. DYNI is also involved in other projects for PELAGOS since 2008, and we are currently installing continuous acoustic monitoring in the south of Port-Cros for the survey of Physeter, Fin whales and some dolphins species. Our objectives are to propose new methods 1) to detect and extract specific characteristics from the sounds emitted by MM, 2) to localize the individuals and 3) to reveal cues on the neurophysiology of the perception-action loop of these larger mammalian brains, 4) to get a new view about the dialectology of MM. During this decade of research, we have studied different species such as: sperm whales (Physeter catodon), Stenella, Tursiops, Humpback whales and Fin whales, among which we present here some of the main methods and results. One the most demonstrative data sets are from the 2005 DCL workshop localization challenge [Adam et al. 2006] with about 2 * 25 minutes * 5 bottom mounted (-1500m) widely spaced hydrophones (400 m distant), that contained Physeter catodon clicks. One set (set 2) contains only a single animal, and the other (set 1) contains four animals (this number is the most accurate estimation according to our knowledge). They were recorded at the Atlantic Undersea Test and Evaluation Center (AUTEC). Most of the results we present here are from these sets. 2. Mono hydrophone methods for whale diving analysis 2.1 An energy pulse ratio naive Bayes OFF-AXIS estimator One of the results we achieved from mono hydrophone records concerns the estimation of the off axis of a Physeter catodon, using some of our tracking results (see next section) to learn a naive Bayes model. The input of our model is the ratio of the energy of the two highest pulses of each click, which is a simplification of the model discussed in [Zimmer 2005]. Figure 4 shows the relatively accurate estimates of the off axis computed from each click using the learned smoothed Bayesian function (left). The prediction (blue) of the off axis is computed on another set than the training set. Figure 4 : A simple naive Bayes model for estimation of the off axis (left, ordinates) of Physeter catodon according to the energy ratio of the two highest pulses (left, abscissa) of its click. (right) predictions on another set than train set which was a part of DCL 2005 Bahamas challenge set [Glotin et al. DCL 2009, presented in Pavia]. 2.2 Estimating the Number of Marine Mammals using Recordings from one hydrophone Earlier to the previous model, X. Halkias worked in a framework to estimate the number of whales using recordings of their echolocation signals obtained from a single hydrophone [HalkiasEllis2006]. The algorithm is based on extracting energy and delta features directly from whale clicks. These features are then used in an unsupervised manner through spectral clustering. The number of marine mammals is estimated by optimizing the number of clusters. The process is repeated for every available hydrophone. This work was presented in DCL 2005, and it was the first (partially accurate) estimation of the number of Physeter in this set 1 recordings. The prediction was between 3 to 5 whales, whereas the gold ears from the Navy told around 10 whales. We are now nearly sure from various results that they are 4 whales recorded in this set 1 DCL 2005. We proposed also in [Lelandais and Glotin 2009] to compute a wavelet decomposition of the click cocktail party. We got some interesting preliminary results showing clearly three different click sources, and probably a residual one in the background. 3. High resolution passive acoustic multi-whale tracking by transitivity operator on stochastic matching filter detections. 3.1 Monowhale 3D tracking on large aperture hydrophone array During the past few years, our team developed a real-time system for tracking a plurality of whales running on a large or short baseline. Our algorithm is simply based on the principle of transitivity of Time Delay of Arrival (TDOA), that is computed by correlation on each pair of hydrophones [Glotin et al. 2008, 2009, Giraduet and Glotin 2006]. It is based on filtering the TDOA that are solving this set of four equations, where Tx(p,q) is the TDOA from the xth highest cross-correlation peak in the cross-correlation between hydrophones p and q, and delta an epsilon : Our algorithm offers a high precision track without false alarm as shown below. The TDOAs were computed on a Teager-Kaiser detector [Kandia and Stylianou, 2005] or an SMF in order to get more precise detections. We demonstrated that this last proposed Stochastic Filter Matching click detector was more efficient than TK (see Fig 5,6,7) [Benard 2010, 2011]. We considered noises as Gaussian stochastic process with 0-mean. Considering a stochastic process S (of length N) of covariance A, and an additive, centered and independent noise b with the variance-covariance matrix B. These processes are not correlated to each other and the matrices are assumed positive and full rank. The SMF theory says that the linear filter h of length N that maximizes the Signal to Noise Ratio (SNR) is the eigen vector solution of Bh = λAh, associated to the greatest eigen value λ0 . Thus, we are looking for the eigen values and vectors of B-1A, resulting into a simple detection function. We computed A with an average of 1000 sperm whale clicks, and B is calculated directly from the hydrophone signals. After h is calculated for each channel, we are able to filter the signal with one bin of shifting. Figure 5 : Video of our fine tracking results computed on the DCL 2005 challenge Bahamas set with only one whale. This video shows, without post process, the most accurate estimations on the depth, Inter Click Interval, and shape of the animal track in 3D (one estimate each 10s). It is available online at http://sabiod.univ-tln.fr/tv, and has been presented in some TV magazines these last months. 3.2 Multiwhale 3D tracking on large aperture hydrophone array After few months and resynchronization of the set, we produced clear results in the case of multiple whales on DCL 2005 set 1, using our algebraic transitivity and SMF filter, as demonstrated in figures 6 and 7. Figure 6 (a): ten seconds of raw signal of the Bahamas set with four emitting whales (b): (a) after TKM filtering. (c): (a) after the SMF. (d): CC between (a) and corresponding raw signal (e): idem than (d) but with (b). (f): idem than (d) but with (c). Circles on the top of some peaks correspond to the 15 maximum peaks that are used for localization. This shows the difference between TK and SMF. Figure 7 : On the top, plan view on Bahamas set1 with the SMF method. Each symbol corresponds to one whale, clearly and continuously tracked (in 3D). The arrows stress their direction. On the bottom, same algorithm but with the Teager-Kaiser detector. Compared to the SMF, one false whale appear due to the lack of echo removal. These results are animated in a video at http://sabiod.org Figure 8 : Same as Fig 7 but in 3D view (SMF detector). 3.3 Multiwhale short base hydrophone array We easily adapted our algorithm for short base (2 square meters). For this purpose, we used the Nemo Onde platform (from INFN, CIBRA and the NEMO Collaboration) that was distributed within the 2009 DCL challenge organized by Gianni Pavan. In this task we first detect each click on each channel. Secondly, the processor determines the relative time delay between signal arrivals at the different receiver elements with cross-correlation. A first static method consists of computing the position of each target, relative to the platform, using directly TDOA estimates and then resolving the acoustic model with a maximum likelihood estimator. In parallel, we proposed a more dynamic tracking system based on particle filtering in the presence of false alarms and an unknown and varying number of targets. This takes into account the problem of data association and is called the Rao-Blackwellized Monte Carlo data association (RBMCDA) algorithm. Thus, we created a trajectography of the whales allowing us to increase the state dimension to estimate other features such as speed. We compute the Cramér-Rao Lower Bound (CRLB) for the given array geometry and the confidence ellipses. This method allows us to locate several sperm whales with a reasonable accuracy [Benard and al. 2011]. Figure 9 : (top) The NEMO array, east of Etna. (bottom) Our 3D tracking results from the recordings of the 15th of august 2005, 15h00 Est. We see clearly the 2 Physeter catodon diving together from -400m to -1000 m in 5 minutes. We acknowledge G. Pavan and Ricobene for NEMO recordings from INFN & CIBRA. 4. Investigating whistles cocktail 4.1 Dictionary learning for whistles composition analyzes In 2011 we proposed a new method for whistles analysis based on sparse coding [Glotin et al . Presented at 2011 DCL Porland]. It is based on unsupervised dictionary learning a protolexicon of the whistles of individual or of a group of whales (here Humpack whales for example).The usual way to determine a recurrent pattern in a data flow in an unsupervised manner is to cluster the data. However the main drawback of such methods (k-means clustering) is that the centroids of each cluster may not cover all the space and unfortunately not suit the data as in [Pace 2010]. One recent way to build accurate clusters is to integrate a regularization term in order to constraint the clustering process and obtain a more sparse dictionary [Sivaram 2010]. Once the dictionary is learned on MFCC vectors computed on different analysis windows (250ms, 500ms, 1s, 2s, and 4s), we use the histogram distribution of an input vector on this dictionary as classification or matching features and pattern. In this new song decomposition, we find common patterns through time and discover some construction brick of the whale song. By computing these features on different recordings through several years, and compared to previous studies [Payne 1971, Mercado 1998, Rickwood 2008], we expect to find more efficiently stable pattern and pattern hire from another group of whales from the previous year [Razik et al., 2013 submitted]. Sparse Coding is currently also demonstrating interesting performances for off axis and range estimation [Paris et al. 2013]. 4.2 Towards tracking overlapped vocalizations Another case of complex whistles overlap was studied in the doctorate research of Halkias [Halkias2009], specifically for dolphin vocalizations. Dolphin vocalizations are classified into two broad categories based on their function: (i) vocalizations for navigational and foraging purposes and (ii) social vocalizations. The former are pulse trains known as echolocation (sonar) and the latter are highly AM-FM signals that can appear tonal or highly harmonic. Social vocalizations can be further clustered into several different types (>100). Marine biologists have indicated that there are two predominant types of social vocalizations, whistles and bursts. The goal of her work was to automatically detect social vocalizations, classify them as bursts or whistles and extract their pitch contour. The models were created using captive dolphin recordings and the calls were manually extracted and hand labeled at a per frame level. Several popular features in speech and music processing were used such as the raw spectrogram, the cepstrum, the short-time autocorrelation and the spectral energy [Halkias2009]. An analysis of the current, state-of-the art detection scheme was provided and extended. Additional detection schemes were provided aimed at highlighting the trade-off between accuracy and computational cost. A brief summary of the algorithms is presented below. (i) Energy/cepstrum thresholding: Currently used in the field requiring manual interaction for setting thresholds in chosen windows of the signal. (ii) An important contribution was the ability to identify the discriminative frequency channels for whistle and burst calls through the Area Under the Curve and apply a set of optimal weights that were computed through gradient descent in order to highlight them [Halkias2009]. (iii)Gaussian Mixture Models (GMM): Model the two different types of social vocalizations using a generative approach through GMMs and apply maximum likelihood in order to classify the signals. (iv) Support Vector Machines (SVM): Train SVMs on the spectrogram and cepstrum for a binary classification problem. Results ranged from 70.4% using optimized thresholding on the cepstrum to 96.6% using SVMs on the spectrogram. These methodologies provided a new toolbox for the field and advanced their ability to analyze marine mammal vocalizations. One of the important needs for marine biologists is the ability to automatically extract the frequency contour of these vocalizations. In [Halkias2009] it is proposed two novel systems for extracting the pitch of social vocalizations as demonstrated in figure 10.. The first system was based on hierarchically driven Hidden Markov Models (HMM) using cepstral coefficients. She created two HMMs one for bursts and one for whistles directly from the data. She evaluated incoming calls using both HMMs and then decoded by applying the appropriate HMM model. The proposed system was then compared with common schemes in music and speech processing; YIN and get F0 respectively. The proposed algorithm yielded accuracy of 66% compared to 47% and 29% for YIN and getf0 respectively. The second system is highly tuned on the data and it is based on a probabilistic framework using Bayesian inference. The model is comprised of two sequential processes. The Front-End: Segment extraction directly from the spectrogram using sine-wave modeling. The Back-End: segment connection using a greedy search algorithm. Decision on connections is based on the smoothness in frequency and energy of the segments. This system provided a partial solution to the most challenging problem currently in the field, the ability to decipher and extract signal overlaps. This was able to achieve an extraction accuracy of 82% Figure 10: Extracted frequency contours of bottlenose dolphin whistle vocalizations. Small black circles indicate the beginning of each extracted segment as detected at the frontend of the system. 5. Conclusion and perspectives We have highlighted some examples illustrating several challenges regarding bioacoustic signal analysis, within our general framework (Fig 11) merging signal processing, pattern recognition and machine learning. While classical statistical machine learning approaches assume that the data are vectors of finite dimension, in areas of application like bioacoustics the data are functions (e.g., curves) rather than vectors of reduced dimension. This fact naturally leads to statistical Functional Data Analysis approaches that we currently study. The latent data (process) models presented in [Chamroukhi et al. 2009] are able to learn from functional data within the paradigm of statistical Functional Data Analysis (FDA), and concerns the context of clustering/segmentation and tracking over time [Chamroukhi 2013], with application for individual acoustic signature and large scale bioacoustic clustering. Figure 11 : The PIMC project architecture that we designed in 2007, and that we still follow, getting higher level year by year from counting, labeling, to behavior analysis, and now thinking on semiotics paradigms. Our research is now being employed in various scientific projects, including the detection and localization of Humpback whale songs using sparse coding for example. We collaborate with Adam Olivier team to provide the inventory of cetacean species around the Guadeloupe and around the St Pierre-et-Miquelon archipelagos (close to Terre-Neuve). Our team is involved into the PELAGOS sanctuary [Laran et al. 2009, Abeille et al 2012], where we will install end of 2013 the first continuous sonobuoy south of Port-Cros. We have strong working relationships with Gianni Pavan and his projects. All these activities are taking place as part of the SABIOD project which aims to detect, cluster, classify and index bioacoustic big data in various ecosystems, at different space and time scales, in order to reveal information on the complex sensori-motor loop, and on the health of an ecosystem, yielding new biodiversity insights. 6. Authors' reference Hervé GLOTIN Pr. (1,2,3), Pascale GIRAUDET Phd teacher in biology (1), Joseph RAZIK associate Pr. (1,3), Sébastien PARIS associate Pr. (1,3), Xanadu HALKIAS senior researcher (1,3), Faicel CHAMROUKHI associate Pr. (1,3), Jean-Marc PREVOT engineer (1), Julie PATRIS Phd teacher in physics (4), Frédéric BENARD Phd student (1,3 from 2006 to 2010), Alexandre MONNIN master & engineer (1,3 from 2007 to 2009), Fabien LELANDAIS master (1,3 from 2007 to 2008), Régis ABEILLE Phd student (1,3 since 2010), Yann DOH Phd student (1,3 since 2010), Olivier DUFOUR Phd student (1,3 since 2011), Céline RABOUY Phd student (1,3 since 2012), Ales MISHCHENKO Post-doc (1,3 since 2012). (1) Université Sud Toulon Var, av. univ, 83957 La Garde Cedex, France ; (2) Institut Universitaire de France, Boulevard St Michel, 75006 Paris, France ; (3) Laboratoire des Sciences de l'Information & des Systèmes (LSIS, www.lsis.org), CNRS UMR 7296 ; (4) Aix Marseille Université, Marseille, France. Corresponding author : Pr. Glotin Hervé, http://glotin.univ-tln.fr, glotin@univ-tln.fr, tel : +33 4 94 14 28 24. Please contact me for any comment or needed references. Most of them, and all our demonstration, are available online at http://sabiod.univ-tln.fr . 7. Acknowledgments We thank the 'Mission Interdisciplinaire' of the French National Research Center which supports the Scaled Acoustic Biodiversity SABIOD project (Pi Glotin) (2012-2016...) http://sabiod.univ-tln.fr We thank PACA region and Chrisar Software which supported the Phd of Frédéric Bénard., and Université Sud Toulon (USTV) which supports the Phd of R. Abeille. We thank PELAGOS and 'Parc National de Port-Cros' which supported the BOUSSOLE (2008-2010) and DECAV (2010-2012) research PELAGOS projects for Physeter catodon and fin whales survey by passive acoustic. We thank the PNPC research team and its direction, for their trust into our BOMBYX sonobuoy project (2013-2017), also supported by Toulon Provence Méditerranée, USTV, and Institut Universitaire de France (IUF). IUF also supports the Complex Acoustic Scene Analysis project 2011-2016 headed by Glotin. We thanks PACA region and Cesigma which support the Phd of Yann Doh started in 2012. Our work is enriched by collaborations, hence we thank the DCL community for its interest, and more particularly Olivier Adam and Gianni Pavan for depth discussions. We thank INFN and CIBRA for providing NEMO recordings [Ricobene et al 2009]. We thank Walter Zimmer for his motivating physical points of view ; Peter Tyak for his insterest to collaborate. We thank also Marc Lammers for the recording system in our Boussole PELAGOS project 20082010 ; Nancy DiMarzio and coll. for providing AUTEC data and for feedbacks after the Monaco workshop in 2005 (resynchronization of the streams). We have special thoughs for Frédéric Benard-Caudal who had, against his wishes, to interrupt his Phd for personnal concerns. 8. References Abeille R., Chamroukhi F., Doh Y., Dufour O., Giraudet P., Halkias X., Glotin H., Prévot J.M., Rabouy C., Razik J. , Audio Visual Detection of MM in North Pelagos, Physeter catodon biopopulation and dolphin Id, PELAGOS project 2010-2012, No 11-031 LSIS-PNPC, 2012 Adam O, Motsch J-F , Desharnais F., NA DiMarzio, D Gillespie, RC Gisiner. 2006. Overview of the 2005 workshop on detection and localization of marine mammals using passive acoustics. Appl. Acoust. 67, 1061-1070. Bénard F., Glotin H, Castellote M., Larans S. Lammers M., Passive acoustic monitoring in the Ligurian Sea, 4th DCL Workshop, 2009 Bénard F., Glotin H, Giraudet P., Highly defined whale group tracking by passive acoustic Stochastic Matched Filter", Open Intech Book, Advances in Sound Localization, ISBN 978-953-307-224-1, 23p http://www.intechopen.com/articles/show/title/highly-definedwhale-group-tracking-by-passive-acoustic-stochastic-matched-filter , fev 2011. Bénard F., Glotin H., Automatic Indexing for Content Analysis of Whale Recordings and XML Representation, in J. on Advances in Signal Processing EURASIP, V2010, id 695017, 8p, 2010. Ed. NATO Undersea Research Center http://www.hindawi.com/journals/asp/2010/695017.html Benard F., Glotin H., Whales Localization using a Large Hydrophone Array: Performance Relative to Cramer-Rao Bounds and Confidence Regions, in Comm. Computer & Inf. Sciences, Springer, Filipe at al. Ed.,V(48), p.294-307, 2009, ISSN 1865-0929 Bénard F., Glotin H., Giraudet P., Whale 3D monitoring using astrophysic NEMO ONDE two meters wide platform with state optimal filtering by Rao-Blackwell Monte Carlo data association, in Journal of Applied Acoustics, Vol. 71 (2010), pp. 994-999 Chamroukhi F.,Samé A., Govaert G., Aknin P., Time series modeling by a regression approach based on a latent process, Neural Networks, Vol22, Issues 5-6, p593-602, 2009. Chamroukhi, F., Glotin H., Samé A., Model-based functional mixture discriminant analysis with hidden process regression for curve classification, Neurocomputing, 2013 in press Doh, Y. (2010). Inter Frequency Attenuation Range estimation model, MSc report, LSIS research, Université Sud Toulon Var Doh, Y., Glotin H., Razik J., Paris S., Estimating the propagation distance for a wideband signal using Inter-Frequency Attenuation: application to the Sperm Whale, submitted in JASA, special Ed of 5th DCL workshop Giraudet P., Glotin H., Real-time 3D tracking of whales by echo-robust precise TDOA estimates with a widely-spaced hydrophone array. Int. Jour. Applied Acoustics, Elsevier Ed., Vol. 67, Issues 11-12, pp 1106-1117, Nov. 2006. Glotin H., Caudal F., Giraudet P., Whales cocktail party: a real-time tracking of multiple whales, in Internat Journal Canadian Acoustics, V 36, p139-145, 2008, ISSN 0711-6659 Glotin H., Giraudet P., Caudal F., Patent, Real time multiple whale tracking by passive acoustics, 2007. no 07/06162, PCT Europe, in PCT extension 2009 Canada, USA, Australie, New Zeeland Glotin H., Bénard F., Patris J., Whale axis angle variation estimation according to clic energy conservation, sept. 2009, in proc of the 4th Workshop on Detection, Classification and Localization of Marine Mammals using Passive Acoustics, Pavia univ. Halkias X., Paris S., Glotin H., Classification of Mysticete Sounds: Extracting spectrotemporal structures of calls using sparse architectures, sub. in JASA, special Ed. of 5th DCL workshop Halkias, X., Ellis, D. Estimating the Number of Marine Mammals using Recordings from One Microphone. IEEE International Conference on Acoustics, Speech, and Signal Processing ICASSP-06, Toulouse, France. May 2006, 4p. Halkias, X., PhD Dissertation: Detection and Tracking of Dolphin Vocalizations, Ellis, D., Reiss, D., Chang S-F., Lazar A., 02/2009 Kandia, V., Stylianou, Y. (2005). Detection of Creak Clicks of Sperm Whales in low SNR conditions, Proc. of the IEEE/OES Oceans Europe Conference, ISBN: 0-7803-9104-7, Brest, France Laplanche C., A Bayesian method to estimate the depth and the range of phonating sperm whales using a single hydrophone , J. Acoust. Soc. Am., 121 (2007), 1519-1528. Laplanche C., Adam O., Lopatka M., Motsch J.-F., Measuring the off-axis angle and the rotational movements of phonating sperm whales using a single hydrophone, J. Acoust. Soc. Am., 119 (2006), 4074-4082. Laran S., M. Castellote, F. Caudal, A. Monnin, H. Glotin, Suivi par acoustique passive des cétacés au nord du sanctuaire. Rapport de recherche du Parc National de Port Cros, 2009, 80p, PELAGOS project report 2007-2009 Lelandais, F. Glotin, H. (2009), “Mallat's Matching Pursuit of sperm whale clicks in real-time using Daubechies 15 wavelets”, in: New Trends for Environmental Monitoring Using Passive Systems, 2008 ISBN: 978-1-4244-2815-1, DOI 10.1109/PASSIVE.2008.4786977 Mercado III, E., A. Kuh. Classification of Humpback whale vocalizations using a selforganizing neural network. in IEEE World Congress on Computational Intelligence. 1998. Monnin, A. (2009). Detections of Physeter and Fin whales in PELAGOS using Boussole acoustic recordings, MSc report, LSIS research report, Université Sud Toulon Var Pace F., Benard F., Glotin H., Adam O., White P., Subunit definition and analysis for humpback whale call classification, Applied acoustics, 71 (2010), p 1107-1112 Paris, S., Doh, Y., Halkias, X., Glotin H., Razik J., Physeter Catodon localisation by sparse coding, in Int. Conference on Machine Learning workshop for Biocoustics, 2013 Atlanta Payne, R.S. and S. McVay, Songs of Humpback Whales. Science, 1971. 173(3997): p. 585597. Rabouy, C. (2012). Functional Data Analysis for Dophin photo identification, MSc report, LSIS research, Université Sud Toulon Var Razik, J., Glotin, H., Paris, S., Doh, Y., and Adam, O.. Sparse coding of Humpback whale songs determines their evolution, submitted in JASA, special Ed of 5th DCL workshop Riccobene G. and NEMO Collaboration, 2009. Long-term measurements of acoustic background noise in very deep sea. Nucl. Instr. and Meth. A. 604 (2009) S149-S157. Rickwood, P., A. Taylor, Methods for automatically analyzing humpback song units. The Journal of the Acoustical Society of America, 2008. 123(3): p. 1763-1772. Sivaram G.S., S.K. Nemala, M. Elhilali, T.D. Tran, H. Hermansky, Sparse coding for speech recognition, IEEE ICASSP, 2010 Zimmer, P.T. Madsen, V. Teloni, M.P. Johnson, P.L Tyack. Off-axis effects on the multipulse structure of sperm whale usual clicks with implications for the sound production. J. Acoust. Soc. Am., 118:3337– 3345, 2005.