Doc - Andre Trudel - Acadia University
advertisement

How to convert a qualitative temporal CSP into a finite domain binary CSP
André Trudel
Jodrey School of Computer Science, Acadia University
Wolf Ville, Nova Scotia, B4P 2R6, Canada
Andre.Trudel@AcadiaU.ca
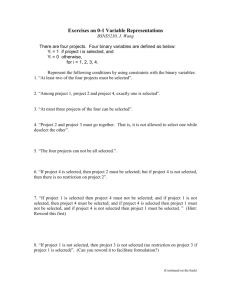
Table 1: Allen’s interval relations
Abstract
We show how to convert a qualitative temporal
CSP problem into an equivalent binary CSP
problem. The main benefit is that binary CSP
solution techniques can be applied to the
equivalent problem. Once a solution is found,
the transformations can be applied in reverse to
generate a solution to the original qualitative
CSP problem.
1 Introduction
Allen [1984] defines a temporal reasoning approach based
on intervals and the possible binary relations between
them, which are shown in table 1. Each relation, except for
equals, has an inverse for a total of 13 possible relations.
The inverse symbol for b is bi and similarly for the others:
mi, oi, di, si, and fi.
Relation
Sy
mbol
Exampl
e
X before
b
XXX
X meets
m
YYY
XXX
o
YYY
XXXX
Y
Y
X
overlaps Y
X during
d
X starts
s
Y
Y
X
finishes Y
X equals
Y
YYYY
XXX
YYYY
YYY
XXX
YYYY
YYY
f
=
XXX
YYYY
YYY
XXX
YYY
The relation between two intervals is allowed to be a
disjunction of the basic relations, which is represented as a
set. For example, (A m B) V (A o B) is written as A {m,o}
B. The relation between two intervals is allowed to be any
subset of I = {b,bi,m,mi,o,oi,d,di,s,si,f,fi,=} including I
itself.
It is interesting to note that Allen [1984] does not
provide a semantics for the intervals. For example, he does
not commit to intervals of the form (x,y) where x<y and
the endpoints are from say the integers, rationals, or reals.
An IA (interval algebra) network is a graph where each
node represents an interval. Directed edges in the network
are labeled with subsets of I. By convention, edges labeled
with I are not shown. van Beek and Manchak [1996], and
Nebel [1997] define an IA network to be consistent (or
satisfiable) if each interval in the network can be mapped
to a real interval such that all the constraints on the edges
hold (i.e., one disjunct on each edge is true).
We adopt Tsang’s [1993] binary CSP definition. A
binary CSP of n variables x1,…,xn has a domain Di of
possible values associated with each variable xi. Each Di is
finite, and it may not necessarily be the case that all the
domains are equal. A binary constraint, Rij, between
variables xi and xj is a subset of the Cartesian product of
their domains. Each Rij is finite. We also require that (a,b)
Rij if and only if (b,a) Rji.
An IA network is a binary CSP with infinite domains.
The intervals are the variables. The domain of each
variable is the set of pairs of reals of the form (x,y) where
x<y. The constraint between two variables i and j is the
label on the edge (i,j) in the IA network.
During the past two decades, research on IA networks
and binary CSPs has progressed relatively independently.
The reason is that algorithms specifically designed for
finite domains are usually not applicable to infinite
domains. For example, van Beek and Manchak [1996]
write that “two of their heuristics cannot be applied in our
context as the heuristics assume a constraint satisfaction
problem with finite domains, whereas IA networks are
examples of constraint satisfaction problems with infinite
domains”.
Recently, Thornton et. al. [2003] show how to convert
an IA network into an equivalent non-binary CSP with
finite integer domains. We extend their work by presenting
a conversion between IA networks and binary CSPs.
Corollary 1: Each of the n intervals in an IA network can
be mapped to an interval with integer end-points in the
range 1…2n such that all the constraints on the edges hold
if and only if its corresponding interval-CSP is consistent.
2 End-point ordering
4 From an interval-CSP to a standard
integer binary CSP
Thornton et. al. [2003] observe that the relative positions
of the interval endpoints in an IA network can be used to
determine consistency. For example, X=(10,15) and
Y=(100.5,110) is a solution to X{b}Y. This solution
imposes the ordering X- < X+ < Y- < Y+ on the endpoints
where X= (X-,X+) and similarly for Y. A simpler solution
is to number the endpoints from left to right which results
in X=(1,2) and Y=(3,4). An IA network with two intervals
is consistent if and only if each interval can be mapped to a
pair of integers (a, b) where a<b, and a,b{1,2,3,4} such
that the constraint on the edge holds. Note that it might be
the case that endpoints from different intervals get mapped
to the same integer (e.g., as in the case of X{=}Y).
Thornton et. al. [2003] generalize the integer mapping to:
We now convert an interval-CSP to a typical binary CSP
with integer domains. To accomplish this, we
lexicographically order each element in the domain of the
interval-CSP and then associate an integer with each
element based on its ordering. The constraints on the edges
are then changed accordingly. The resulting CSP is called
an integer-CSP.
The integer-CSP associated with the interval-CSP in
figure 1 is constructed as follows. We first order and
number the elements of the domain as shown in table 2.
Theorem 1: Each interval in an IA network with n
intervals can be mapped to a real interval such that all the
constraints on the edges hold if and only if each interval in
the IA network can be mapped to an interval with integer
end-points in the range 1…2n such that all the constraints
on the edges hold.
We then replace each interval in figure 1 with its
corresponding ranking integer from table 2. The integerCSP is shown in figure 2.
The constraints in the interval-CSP are translated as
follows. The first tuple in the edge constraint in figure 1 is
((1,2), (2,3)). From table 2, (1,2) is mapped to 1 and (2,3)
to 4. Thus, the first tuple in the edge constraint of the
integer-CSP in figure 2 is (1,4). Similarly for the other
tuples in the constraint. Note that each tuple in the
constraint in figure 2 has its first element less than its
second element (i.e., they have the syntax of an interval).
This need not be the case in general. For example, the
integer-CSP for X{bi}Y has {(6,1)} as its constraint.
3 From an IA network to a binary CSP
Based on theorem 1, Thornton et. al. [2003] convert an IA
network to a non-binary CSP with finite domains. Each
endpoint becomes a variable with domain {1,…,2n}. A
label on an edge (X,Y) in the IA network imposes a
constraint on the variables X-, X+, Y-, and Y+.
We use a different approach to convert an n interval IA
network to a binary CSP. We call the resulting CSP an
interval-CSP. In the interval-CSP, each interval X is a
variable with domain {(X-, X+) | X-<X+, and X-,
X+{1,…,2n}}. The constraint between variables X and Y
is the set of pairs ((X-, X+), ( Y-, Y+)) that satisfy the label
on the edge (X,Y) in the original IA network. For example,
the interval-CSP associated with X {m} Y is given in
figure 1. The domain for each variable is shown below its
node. The edge is labeled with the set of tuples that satisfy
the constraint.
Based on the construction of the interval-CSP, we
have:
1
2
3
4
5
6
(1,2) (1,3) (1,4) (2,3) (2,4) (3,4)
Table 2: Lexicographic ordering of the domain
In general, each variable domain in an n node integerCSP is the set {1,…,n(2n-1)}.
The renaming of the domain does not affect
consistency:
Corollary 2: An interval-CSP is consistent if and only if
its corresponding integer-CSP is consistent.
From theorem 1 and corollaries 1 and 2 it follows that:
Theorem 2: An IA network is consistent if and only if its
corresponding integer-CSP is consistent.
Since an integer-CSP is a standard binary CSP, any
binary CSP algorithm can be used to solve the integerCSP. By then applying the above transformations in
reverse, we can convert an integer-CSP solution to a
solution for the original IA network. Therefore, an IA
network can be solved using binary CSP techniques.
X
Y
{((1,2),(2,3)),
((1,2),(2,4)),
((1,3),(3,4)),
((2,3),(3,4))}
{(1,2),
(1,3),
(1,4),
(2,3),
(2,4),
(3,4)}
{(1,2),
(1,3),
(1,4),
(2,3),
(2,4),
(3,4)}
Figure 1: X{m}Y and its interval-CSP
X
Y
{1,…,6}
{(1,4), (1,5), (2,6), (4,6)}
{1,…,6}
Figure 2: The integer-CSP for X{m}Y
5 Example
B
{o}
{m}
{b,d}
A
C
Figure 3: IA network
An IA network is shown in figure 3. In the intervalCSP, each node has domain {(X-, X+) | X-<X+, and X-,
X+{1,…,6}}. The constraints on the edges are:
Edge
(A,B):
{((1,2),(2,3)),
((1,2),(2,4)),
((1,2),(2,5)), ((1,2),(2,6)), ((1,3),(3,4)), ((1,3),(3,5)),
((1,3),(3,6)), ((1,4),(4,5)), ((1,4),(4,6)), ((1,5),(5,6)),
((2,3),(3,4)), ((2,3),(3,5)), ((2,3),(3,6)), ((2,4),(4,5)),
((2,4),(4,6)), ((2,5),(5,6)), ((3,4),(4,5)), ((3,4),(4,6)),
((3,5),(5,6)), ((4,5),(5,6))}
Edge
(B,C):
{((1,3),(2,4)),
((1,3),(2,5)),
((1,3),(2,6)), ((1,4),(2,5)), ((1,4),(2,6)), ((1,4),(3,5)),
((1,4),(3,6)), ((1,5),(2,6)), ((1,5),(3,6)), ((1,5),(4,6)),
((2,4),(3,5)), ((2,4),(3,6)), ((2,5),(3,6)), ((2,5),(4,6)),
((3,5),(4,6))}
Edge
(A,C):
{((1,2),(3,4)),
((1,2),(3,5)),
((1,2),(3,6)), ((1,2),(4,5)), ((1,2),(4,6)), ((1,2),(5,6)),
((1,3),(4,5)), ((1,3),(4,6)), ((1,3),(5,6)), ((1,4),(5,6)),
((2,3),(4,5)), ((2,3),(4,6)), ((2,3),(5,6)), ((2,4),(5,6)),
((3,4),(5,6)), ((2,3),(1,4)), ((2,3),(1,5)), ((2,3),(1,6)),
((2,4),(1,5)), ((2,4),(1,6)), ((2,5),(1,6)), ((3,4),(1,5)),
((3,4),(1,6)), ((3,4),(2,5)), ((3,4),(2,6)), ((3,5),(1,6)),
((3,5),(2,6)), ((4,5),(1,6)), ((4,5),(2,6)), ((4,5),(3,6))}
To construct the integer-CSP, we first order the domain
as shown in Table 3.
(
1
(
2
(
3
(
4
(
5
(
6
(
7
(
8
(
9
1,2)
1,3)
In the integer-CSP, each variable has the domain
{1,…,15}. The constraints on the edges are:
Edge (A,B): {(1,6), (1,7), (1,8), (1,9), (2,10),
(2,11), (2,12), (3,13), (3,14), (4,15), (6,10), (6,11),
(6,12), (7,13), (7,14), (8,15), (10,13), (10,14), (11,15),
(13,15)}
Edge (B,C): {(2,7), (2,8), (2,9), (3,8), (3,9),
(3,11), (3,12), (4,9), (4,12), (4,14), (7,11), (7,12),
(8,12), (8,14), (11,14)}
Edge (A,C): {(1,10), (1,11), (1,12), (1,13), (1,14),
(1,15), (2,13), (2,14), (2,15), (3,15), (6,13), (6,14),
(6,15), (7,15), (10,15), (6,3), (6,4), (6,5), (7,4), (7,5),
(8,5), (10,4), (10,5), (10,8), (10,9), (11,5), (11,9),
(13,5), (13,9), (13,12)}
Edge
Integer-CSP
(A,B)
{(1,7)}
(B,C)
{(7,11)}
(A,C)
{(1,11)}
IntervalCSP
{((1,2),(2,
4))}
{((2,4),(3,
5))}
{((1,2),(3,
5))}
IA
Network
{m}
{o}
{b}
Table 4: Solution
A solution to the integer-CSP is shown in the column
labeled “Integer-CSP” in table 4. Applying the
transformations in reverse, the corresponding interval-CSP
solution is shown in the next column, and the IA network
solution in the last column.
1,4)
1,5)
1,6)
2,3)
2,4)
2,5)
2,6)
(
3,4)
1
0
(
3,5)
1
1
(
3,6)
1
2
(
4,5)
6 Conclusion
In this paper, we showed how to convert an IA network
into an equivalent binary CSP. Using standard binary CSP
algorithms, we can find a solution which can then be
converted back to a solution to the original IA network.
Future empirical studies will investigate the relative
performance of IA network and binary CSP algorithms on
equivalent problems.
The bottleneck in IA network path consistency
algorithms is performing the composition operation
between subsets of Allen’s relations. There may be a
speedup by avoiding this particular bottleneck by
performing arc and path consistency on the equivalent
binary CSP.
1
3
(
4,6)
1
Acknowledgements
4
(
1
5,6)
5
Table 3: Lexicographic ordering of the tuples
Research supported by an NSERC grant
References
[Allen, 1984] J.F. Allen. Towards a general model of
action and time, Artificial Intelligence, 23(2), 1984, p. 123154.
[Nebel, 1997] B. Nebel. Solving hard qualitative temporal
reasoning problems: evaluating the efficiency of using the
ORD-Horn class, Constraints, 1, 1997, p. 175-190.
[Thornton et al., 2003] J. Thornton, M. Beaumont, A.
Sattar, and M. Maher. A local search approach to modeling
and solving interval algebra problems, to appear in The
journal of logic and computation, 2003.
[Tsang, 1993] E. Tsang. Foundations of constraint
satisfaction, Academic Press, 1993.
[van Beek and Manchak, 1996] P. van Beek and D.W.
Manchak. The design and experimental analysis of
algorithms for temporal reasoning, Journal of Artificial
Intelligence Research, 4, 1996, p. 1-18.