Physics I - Rose
advertisement

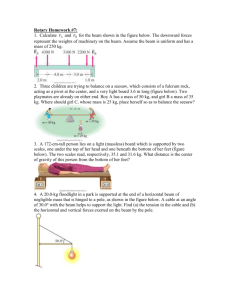
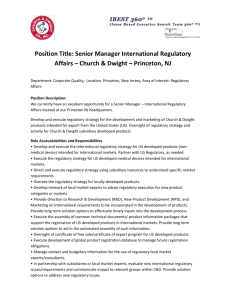
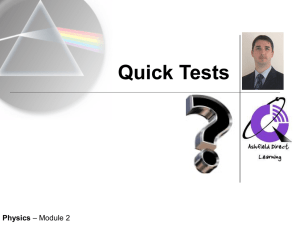
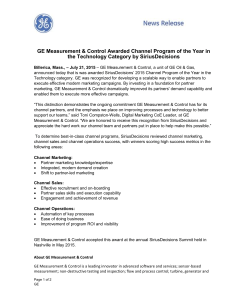
Physics II Homework III CJ Chapter 10; 76 Chapter 11; 11, 12, 18, 52, 62, 82 Chapter 13; 17, 66 10.76. IDENTIFY: Apply conservation of energy to the motion of the ball as it rolls up the hill. After the ball leaves the edge of the cliff it moves in projectile motion and constant acceleration equations can be used. (a) SET UP: Use conservation of energy to find the speed v2 of the ball just before it leaves the top of the cliff. Let point 1 be at the bottom of the hill and point 2 be at the top of the hill. Take y 0 at the bottom of the hill, so y1 0 and y2 28.0 m. EXECUTE: 1 2 K1 U1 K 2 U 2 mv I mgy2 12 mv22 12 I 22 2 1 2 1 1 2 Rolling without slipping means v / r and 7 10 1 2 I 2 1 2 2 5 mr 2 (v / r ) 2 15 mv 2 mv12 mgy2 107 mv22 v2 v12 107 gy2 15.26 m/s SET UP: Consider the projectile motion of the ball, from just after it leaves the top of the cliff until just before it lands. Take y to be downward. Use the vertical motion to find the time in the air: v0 y 0, ay 9.80 m/s2 , y y0 28.0 m, t ? EXECUTE: y y0 v0 yt 12 ayt 2 gives t 2.39 s During this time the ball travels horizontally x x0 v0 xt (15.26 m/s)(2.39 s) 36.5 m. Just before it lands, v y v0 y a yt 23.4 m/s and vx v0 x 15.3 m/s v v v 28.0 m/s 2 x 2 y (b) EVALUATE: At the bottom of the hill, v / r (25.0 m/s)/ r. The rotation rate doesn’t change while the ball is in the air, after it leaves the top of the cliff, so just before it lands (15.3 m/s)/ r. The total kinetic energy is the same at the bottom of the hill and just before it lands, but just before it lands less of this energy is rotational kinetic energy, so the translational kinetic energy is greater. 11.11. IDENTIFY: The system of the person and diving board is at rest so the two conditions of equilibrium apply. (a) SET UP: The free-body diagram for the diving board is given in Figure 11.11. Take the origin of coordinates at the left-hand end of the board (point A). is the force applied at the support point and F2 is the force at the end that is held down. F1 Figure 11.11 EXECUTE: A 0 gives F1 (1.0 m) (500 N)(3.00 m) (280 N)(1.50 m) 0 F1 (500 N)(3.00 m) (280 N)(1.50 m) 1920 N 1.00 m (b) F y may F1 F2 280 N 500 N 0 F2 F1 280 N 500 N 1920 N 280 N 500 N 1140 N EVALUATE: We can check our answers by calculating the net torque about some point and checking that z 0 for that point also. Net torque about the right-hand of the board: (1140 N)(3.00 m)+(280 N)(1.50 m) (1920 N)(2.00 m) 3420 N m 420 N m 3840 N m 0, which checks. 11.12. IDENTIFY: Apply the first and second conditions of equilibrium to the beam. SET UP: The boy exerts a downward force on the beam that is equal to his weight. EXECUTE: (a) The graphs are given in Figure 11.12. (b) x 6.25 m when FA 0, which is 1.25 m beyond point B. FA 0, so FB 900 N. The (300 N)(4.50 m) 1.50 m. (900 N) (c) Take torques about the right end. When the beam is just balanced, distance that point B must be from the right end is then EVALUATE: When the beam is on the verge of tipping it starts to lift off the support A and the normal force FA exerted by the support goes to zero. Figure 11.12 11.18. IDENTIFY: Apply the conditions for equilibrium to the crane. SET UP: The free-body diagram for the crane is sketched in Figure 11.18. Fh and Fv are the components of the force exerted by the axle. T pulls to the left so Fh is to the right. T also pulls downward and the two weights are downward, so Fv is upward. EXECUTE: (a) z 0 gives T ([13 m]sin 25° wc ([7.0 m]cos55°) wb ([16.0 m]cos55° 0 . T (11,000 N)([16.0 m]cos55°) (15,000 N)([7.0 m]cos55°) 2.93 104 N . (13.0 m)sin 25° (b) F x F y 0 gives Fh T cos30° 0 and Fh 2.54 104 N . 0 gives Fv T sin30° wc wb 0 and Fv 4.06 104 N . EVALUATE: tan along the crane. Fv 4.06 104 N Fh 2.54 104 N and 58° . The force exerted by the axle is not directed Figure 11.18 11.52. IDENTIFY: Apply the first and second conditions for equilibrium to the bridge. SET UP: Find torques about the hinge. Use L as the length of the bridge and wT and wB for the weights of the truck and the raised section of the bridge. Take y to be upward and x to be to the right. EXECUTE: (a) TL sin70 wT 34 L cos30 wB 12 L cos30 , so T 34 mT 12 mB (9.80 m s 2 )cos30 2.57 105 N. sin 70 (b) Horizontal: T cos 70 30 1.97 105 N (to the right). Vertical: wT wB T sin 40 2.46 105 N (upward). EVALUATE: If is the angle of the hinge force above the horizontal, tan 2.46 105 N 1.97 105 N and 51.3° . The hinge force is not directed along the bridge. 11.62. IDENTIFY: Apply F 0 to each object, including the point where D, C and B are joined. Apply z 0 to the rod. SET UP: To find TC and TD , use a coordinate system with axes parallel to the cords. EXECUTE: A and B are straightforward, the tensions being the weights suspended: Τ A (0.0360 kg)(9.80 m/s 2 ) 0.353 N and TB (0.0240 kg 0.0360 kg)(9.80 m s 2 ) 0.588 N . Applying Fx 0 and Fy 0 to the point where the cords are joined, TC TB cos36.9 0.470 N and TD TB cos53.1 0.353 N . To find TE , take torques about the point where string F is attached. TE (1.00 m) TD sin 36.9 (0.800 m) TC sin 53.1 (0.200 m) (0.120 kg)(9.80 m s 2 )(0.500 m) and TE 0.833 N. TF may be found similarly, or from the fact that TE TF must be the total weight of the ornament. (0.180kg)(9.80m s 2 ) 1.76 N, from which TF 0.931 N. EVALUATE: The vertical line through the spheres is closer to F than to E, so we expect TF TE , and this is indeed the case. 11.82. IDENTIFY: Apply the equilibrium conditions to the pole. The horizontal component of the tension in the wire is 22.0 N. SET UP: The free-body diagram for the pole is given in Figure 11.82. The tension in the cord equals the weight W. Fv and Fh are the components of the force exerted by the hinge. If either of these forces is actually in the opposite direction to what we have assumed, we will get a negative value when we solve for it. EXECUTE: (a) T sin 37.0° 22.0 N so T 36.6 N . W (22.0 N)(1.75 m) 28.5 N . 1.35 m (b) F y 0 gives Fv T cos37.0° W 0 z 0 gives (T sin37.0°)(1.75 m) W (1.35 m) 0 . and Fv (36.6 N)cos37.0° 55.0 N 84.2 N . W T sin37.0° Fh 0 and Fh 28.5 N 22.0 N 6.5 N . F F F 84.5 N 2 h 2 v F x 0 gives The magnitude of the hinge force is . EVALUATE: If we consider torques about an axis at the top of the plate, we see that be to the left in order for its torque to oppose the torque produced by the force W. Fh must Figure 11.82 T 2 13.17. IDENTIFY: m k k m . ax x so amax k A . F kx . m SET UP: ax is proportional to x so ax goes through one cycle when the displacement goes through one cycle. From the graph, one cycle of ax extends from t 0.10 s to t 0.30 s, so the period is T 0.20 s. k 2.50 N/cm 250 N/m. From the graph the maximum acceleration is 12.0 m/s2 . EXECUTE: (a) T 2 m gives k 2 2 T 0.20 s m k (250 N/m) 0.253 kg 2 2 mamax (0.253 kg)(12.0 m/s 2 ) 0.0121 m 1.21 cm k 250 N/m (b) A (c) Fmax kA (250 N/m)(0.0121 m) 3.03 N EVALUATE: We can also calculate the maximum force from the maximum acceleration: Fmax mamax (0.253 kg)(12.0 m/s 2 ) 3.04 N, which agrees with our previous results. 13.66. (a) IDENTIFY and SET UP: Combine Eqs. (13.12) and (13.21) to relate vx and x to T. EXECUTE: T 2 m/k We are given information about v x at a particular x. The expression relating these two quantities comes from conservation of energy: 12 mvx2 12 kx 2 12 kA2 We can solve this equation for m/k , and then use that result to calculate T. mvx2 k ( A2 x 2 ) m k Then (0.100 m) 2 (0.060 m) 2 A2 x 2 0.267 s vx 0.300 m/s T 2 m/k 2 0.267 s 1.68 s. (b) IDENTIFY and SET UP: equation: 12 mvx2 12 kx 2 12 kA2 We are asked to relate x and vx , so use conservation of energy kx 2 kA2 mvx2 x A2 (m/k )vx2 (0.100 m) 2 (0.267 s) 2 (0.160 m/s) 2 0.090 m EVALUATE: Smaller vx means larger x. (c) IDENTIFY: If the slice doesn't slip the maximum acceleration of the plate (Eq.13.4) equals the maximum acceleration of the slice, which is determined by applying Newton's 2nd law to the slice. SET UP: For the plate, kx max and ax (k/m) x. The maximum x is A, so amax (k/m) A. If the carrot slice doesn't slip then the static friction force must be able to give it this much acceleration. The free-body diagram for the carrot slice (mass m ) is given in Figure 13.66. EXECUTE: F y may n mg 0 n mg Figure 13.66 F x max s n ma s mg ma and a s g 2 But we require that a amax (k/m) A s g and s k A 1 0.100 m 0.143 m g 0.267 s 9.80 m/s 2 EVALUATE: We can write this as s 2 A/g. More friction is required if the frequency or the amplitude is increased.