Abstract The value of a solid angle appears frequently when solving
advertisement

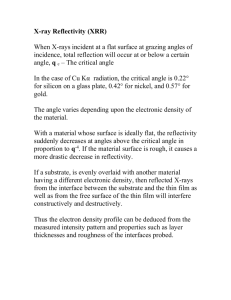
On the Approximation of the Auto Solid Angle for Solving Integral Equations DIANA RUBIO 1 and MARÍA INÉS TROPAREVSKY 2 1 Instituto de Ciencias, Universidad Nacional de General Sarmiento 1 Escuela de Ciencia y Tecnología, Universidad Nacional de General San Martín 2 Departamento de Matemática, Facultad de Ingeniería Universidad de Buenos Aires ARGENTINA Abstract: - The value of a solid angle appears frequently when solving integral equations in potential theory. The integral that represents it may become an improper one, known as the auto solid angle, and its value must be evaluated carefully. A summary of different approaches to calculate the values of solid angles is included, and a modified method for the calculation on any surface is proposed. Finally, this approach is used to calculate a numerical solution of the Forward Problem (FP) in EEG. In addition, an error bound of the discretization of the problem is stated. Key-Words: - Solid Angle, Integral Equations, BEM, FP in EEG. 1 Introduction The value of the solid angle appears in many fields as potential theory, lighting design, astronomy, luminosity, cardiac electrophysiology, pharmaceutical chemistry and biophysics, among others. Here we focus on the case of a Poisson-type equation numerically solved using Boundary Element Methods (BEM). The differential equation is transformed into an integral one and, in many cases, one faces the problem of calculating an integral whose value is the solid angle subtended by a surface at a point. When the point does not belong to the surface, the integral can be easily evaluated using numerical methods with any desired accuracy. When the point does belong to the surface, it is an improper integral, known as the auto solid angle, and its value must be approximated in a different way. We review some formulas appearing in the literature and propose an approach to approximate the value of the auto solid angle. As an example, we apply this approach to obtain a numerical solution of the Forward Problem in EEG and we estimate the error due to the discretization of the integral equations that models the problem. 2 Weak Solutions of a Poisson equation and the Solid Angle to the weak solution u(x) and to the fundamental solution of u 0 in G . Then, an equation that contains integrals of the type r r' dSr' , where r is a point on | r r' |3 S the closed surface S G , ( see [3], [4]) is obtained. I ( r ) u( r' ) To calculate the value of I(r), we discretize the surface S into m elements Ej and call E the collection of the elements, i.e. E m E j . The values of u on S j 1 are approximated by linear combinations of chosen basis functions defined on the elements Ej. In this frame, the integral terms I(r) take the form Cj r r' r r' 3 dSr' where C j C j ( u , E j ) is a Ej constant that depends on the basis functions, on the values of u at the nodal points and on the elements Ej. Hence, we focus on the integral r , j r r' | r r' | 3 dSr' , (1) Ej that is the value of the solid angle subtended by Ej at the point r (see [5]). Note that the integral (1) depends on the relative position of r with respect to Ej. For r E j , the value of r , j can be easily evaluated using numerical Consider a Poisson-type equation .( u ) F on methods with any desired accuracy. For r E j the a bounded domain G R 3 , G C 1 , where is a given piecewise constant function, F is the source and u is the unknown. The divergence theorem is applied integral (1) becomes improper and it is usually referred to as the auto solid angle. There exists several approaches to calculate the auto solid angle depending mostly on the shape of the elements Ej and on the nodal points. Some of them are based on the following geometric property: for any closed and smooth surface S, the solid angle at any of its points is 2 , (see [5]). We will distinguish the elements that contain the point r from those that does not. We will use j as the index for the first ones, i.e. r E j , and l for the latter ones, i.e. r El . Let r ,l be the solid angle subtended by El from r, where r El and let r r,j be the sum of j the solid angles subtended by the surface elements Ej that share the point r, i.e. r E j (auto solid angles for r). Since E E E l l r r ,l j 2 . j , we may write some improvements in the accuracy of the solution of the FP is obtained for a particular problem. where r , j lim 0 r , j and r , j are integrals on elements E j that differs from Ej in a small surface of area less than ε that contains the point r (see [12]). In [1] and [2] the authors suggest that the property (2) can be used to update the value of the approximated solid angles as follows. In [1] the authors approximate all the integrals and then use (2) to correct the auto solid angles. In [2], the author calculates the integrals r ,l and gives a prescription to distribute the difference 2 r ,l among the auto solid angles l (2) r,j . l 3 Some Approaches to Calculate The Solid Angle Some of the approaches to calculate the solid angle proposed in the literature are based on the shape of the elements chosen to discretized the surfaces. For this reason we consider separately the case where the meshed surface E is a polyhedral one. The values of r , j may be approached by r , j , If the relative position of the point r with respect to the surrounding elements are as shown in Fig.1, the solid angle subtended by the union of these elements from r can be approximated by r Ej r r' r r' 3 dSr' 2 cos 0 , where j 0 arcsin( R' / R ) (see [1]). r 3.1 Space Discretization using Planar Elements Many authors considered flat triangles to discretize a surface. The solid angle is usually calculated by means of the formulae given by van Oosterom and Strackee (see [10]), which is an improvement of the one developed by Barr et al.(see [6]). Other formulas were developed by Barnard (see [11]) and de Munck (see [12]). Concerning the auto solid angle, we distinguish the following situations: If r is an interior point of Ej, for instance the center of mass, the value of r , j is zero. Some 3.2 Space Discretization using No Planar Elements authors use this result to calculate the approximated solution to a particular problem and compare the results obtained (see [13]). If r is a vertex of Ej, the normal vector at the point r does not exist, then r , j is not defined. In The values of r , j may be approached by r , j , [7] the authors manage this situation choosing a normal vector at the vertices by the method of the weighted vertices. They showed examples where Fig.1: The elements surrounding r. As mentioned before, the solid angle can be evaluated by any numerical integration method whenever the integral r , j is not an improper one. Some approaches found in the literature can be adapted to calculate the auto solid angle on curved elements Ej: as described above. The approaches proposed in [1] and [2] may be generalized to not necessarily flat elements. 3.3 Another Approach to Calculate the Auto Solid Angle We present a slightly modification to the approaches proposed in [1] and [2]. We numerically approximate the proper integrals r ,l with a desired precision. Then we calculate the value of the sum of the auto solid angles from r based on (2) as r 2 r ,l . Finally, we apportion l the latter value among r , j proportionally to the areas of Ej. In consequence, r , j is approximated by Aj ~ r , j 2 r ,l , l Ai We apply integral theorems and the Boundary Element Method (see [4]) to obtain integral equations for points on the surfaces of conductivity transition Sj k k 1 2 u( r ) 1v( r ) (4) j j 1 r r' u ( r ' ) n ( r ' ) dS ' 3 4 j 1 r r' S 3 j for r S k , with v( r ) .J i 1 41 r r' dr' . G (3) The solution of the integral equation (4) is the potential distribution on the spherical surfaces S j . where Ai is the area of Ei. Note that this approach may be applied to either planar or curved elements. This approximation differs from the one presented in [1] in that they approximate all the solid angles, then use property (2) and distribute the error among the auto solid angles. The difference with [2] is just the way in which we distribute the value of r among the r , j . We discretized the surfaces S j by spherical i elements E j ,k such that S j E where the j ,k k nodal points are the vertices of elements E j ,k . Thus, the surfaces S j are not being approximated, they are just divided into simpler sets (see Fig. 2). Next, we present a problem where the integrals representing the solid angle appear. We show a numerical solution to this problem using no planar elements to discretize the surface. We apply the approximation introduced above and we establish error bounds for the discretization. Fig. 2 The discretized surface. 4 Numerical Example The Forward Problem in EEG consists in finding the potential distribution on the scalp caused by current sources within the brain (see [8]). The geometry of the head is modeled by three concentric spherical volumes: G1 the brain, G2 the skull and G3 the scalp. The surfaces between them are denoted by S1 , S 2 and S 3 , respectively. The problem may be described by the following Poisson-type, second order elliptic equation on a domain G representing the human head, .( ( x )u( x )) .J i ( x ) , where represents the conductivity (that is assumed to be discontinuous across the surfaces S j and constant on each S j ), u(x) is the electric potential and J i (x) is the impressed current modeled as a dipole (see [14]. [15]). We approximate u over each E j ,k by the average at the vertices, C j ,k 1 Nk Nk u i 1 j ,k ,i , where Nk is the number of vertices of the element E j ,k . The surface I S j ( r ) u( r' ) integral Sj approximated by r r' r r' 3 dS' ~ I S j ( r ) C j ,k j ,k is (5) E j ,k ~ where j ,k is calculated as follows. If r E j ,k , ~ j ,k Ê j ,k r r' dS' R j ,k where Rj,k is the error of r r' the integration rule and if r E j ,k we use the approach (3). We then obtain a linear system of equations of the form Mu=F whose matrix M depends on the conductivity values and on the approximated values of the solid angles (see [14]). The solution vector u contains the values of the potential u at the grid points and F depends only on the dipole position and strength. In Fig. 3 we show typical results of the scalp potential distribution when the radii of Gi are .071m, .078m and .085m and the conductivity values are ( 1 , 2 , 3 ) ( 0.33,0.0042,0.33 ) Am/m for the brain, skull and scalp, respectively (see [9]). a) 5 Conclusion In this communication we proposed a way to calculate the solid angle subtended by a surface S at a point r and we apply this approach to obtain an approximated solution of the FP in EEG. We analyze the error that is obtained and observed that the approximation strongly depends on the discretization of u on the surface. b) Fig. 3 Numerical Examples. a) Dipole Position: (0; 0.0065; 0), Dipole Moment: (0;0;1) 10-9 b) Dipole Position: (0;0.0062;0.04) Dipole Moment: -10 (1.2;0.6;0.6) 10 We theoretically estimates the error in the discretization process of the equations. Approximating the proper integrals by the Simpson Rule, an error of O( h 5 ) is obtained, where h is the length of the subdivisions of the interval of integration. In addition, since u is approximated by a constant on E j ,k , the approximation of the integral on E j ,k becomes r r' u( r' ) r r' 3 ~ dS' C k , j k , j E j ,k r r' u( r' ) r r' 3 dS' C j ,k E j ,k C j ,k E j ,k 2 u C j ,k Note that since the way in which u is approximated determined the error bound, choosing a refined integration method may be worthless. We want to point out that in order to estimate the total error of the calculated solution, in addition to the one produced by the discretization of the integral equation, one must consider the error introduced by the approximation of the domain where the equations are solved and the error due to the estimated value of the parameter (see [14], [15]). E j ,k r r' r r' L ( E j ,k ) 3 u r r' r r' 3 dS' ~ dS' C j ,k j ,k L ( E j ,k ) O( h 5 ). References: [1] J. W. H. Meijs, O. W. Weier, M. J. Peters, A. Van Oosterom, On the Numerical Accuracy of the Boundary Element Method, IEEE Trans. Biomed. Eng., 36, Nº 10, 1989, pp. 1038-1049. [2] L. Heller, Computation of the Return Current in Encephalography: The Auto Solid Angle, SPIE 1351 Digital Image Synthesis and Inverse Optics 1990, pp. 376-390. [3] L.C. Evans, Partial Differential Equations, American Mathematical Society, Providence, RI, 1999. [4] P.K. Kythe, Fundamental Solutions for Differential Operators and Applications, Birkhäuser, 1996. [5] L. A. Santaló, Vectores y Tensores con sus Aplicaciones, EUDEBA, B. A., Argentina, 1973. [6] R.C. Barr, M. Ramsey, M.S. Spach, Relating Epicardial to Body Surface Potential Distributions by Means of Transfer Coefficients Based on Geometry Measurements, IEEE. Trans. Biomed. Eng., BME-24, 1977, pp. 1-11. [7] J.Budiman, D.S. Buchanan, An Alternative to the Biomagnetic Forward Problem in Realistically Shaped Head Model, the “Weighted Vertices”, IEEE Trans. Biomed. Eng., 40, No. 10, 1993, pp. 1048-1053. [8] M.Hamalainen,R.Hari,R.J.Ilmoniemi, J.Knuutila, O.Lounasmaa, Magnetoencephalography, Theory, Instrumentation and Applications to Noninvasive Studies of the Working Human Brain, Reviews of modern Physics, 65, Nº 2, 1993, pp. 414-487. [9] L.A. Geddes, L.E. Backer, The Specific Resistance of Biological Material, a Compendium of Data for the Biomedical Engineering and Physiologists, Med. Biol. Eng,, 5, 1967, pp. 271293. [10] A. van Oosterom and J. Strackee, The Solid Angle of a Plane Triangle, IEEE Trans. Biomed. Eng., Vol. BME-30, No.2, 1983, pp. 123-126. [11] A.C.L. Barnard, I.M. Duck, M.S. Lynn and W.P. Timlake, The Application of Electromagnetic Theory to Electrocardiography ”, Biophys. J., vol.7, 1967, pp. 463-491. [12] de Munck A Linear Discretization of the Volume Conductor Boundary Integral Equation Using Analytically Integrated Elements, IEEE Trans. Biomed. Eng., 39, Nº9, 1992, pp. 986-990. [13] H.A. Schlitt, Heller, L. et al, Evaluation of Boundary Element Methods for the EEG Forward Problem: Effect of Linear Interpolation, IEEE Trans. Biomed. Eng., 42, Nº1, 1995, pp. 52-58. [14] D. Rubio and M.I. Troparevsky, On the Accuracy of an Approximated Solution of the EEG Forward Problem, Proc. X RPIC Reunión de Trabajo en Procesamiento de la Información y Control, Argentina, Vol. 1, 2003, pp. 19-23. [15] M.I. Troparevsky and D. Rubio, On the Weak Solutions of the Forward problem in EEG, Journal of Applied Mathematics, Hindawi Publishing Corp. (to appear).