Dusseault_CIPC_ 2007.. - University of Waterloo

PETROLEUM SOCIETY
CANADIAN INSTITUTE OF MINING, METALLURGY & PETROLEUM
PAPER 2007-028
Monitoring and Modeling in Coupled
Geomechanics Processes
MAURICE B. DUSSEAULT
Earth Sciences, University of Waterloo
This paper is to be presented at the Petroleum Society’s 8 th Canadian International Petroleum Conference (58 th Annual Technical
Meeting), Calgary, Alberta, Canada, June 12 – 14, 2007. Discussion of this paper is invited and may be presented at the meeting if filed in writing with the technical program chairman prior to the conclusion of the meeting. This paper and any discussion filed will be considered for publication in Petroleum Society journals. Publication rights are reserved. This is a pre-print and subject to correction.
Abstract
Geomechanics issues are vital in all reservoir processes, but particularly so in weak, unconsolidated sandstones.
Coupled stress-flow simulation is necessary to analyse and understand effects such as changes in reservoir volume that arise from heating and pressurization. Also, non-linear plasticity models incorporating shear dilatancy are needed to simulate the dilation effects that are observed in thermal extraction processes in unconsolidated sands.
Stress-flow coupling is based on the volume changes that arise with pressure and temperature changes (Δp, ΔT).
Incorporating shear dilation is based on computation of effective stresses from
T and
p, then assessing the state of the rock to see if it is shearing and by how much it must dilate.
These processes are ill-quantified at present, so it is necessary to monitor the process to calibrate simulation models.
The two monitoring domains of greatest interest to coupled geomechanics simulation are the deformation field and the seismic attributes field. How these fields evolve in space and with time are key factors to tracking processes, to calibrating geomechanics models, and to the successful optimization of complex in situ processes.
A general geomechanics view of how to achieve process monitoring and optimization goals is presented here. Though recent developments have been promising further progress in monitoring, inversion, and coupled geomechanics simulation is needed.
Introduction
Conventional monitoring in petroleum engineering addresses pressure, temperature, and rate measurements, as well as providing some data collected by wellbore logs such as temperature or rate surveys (e.g. spinner surveys). Oil, gas and water production and injection rates are required for regulatory purposes and to help calculate saturations and recovery factors
(R
F
).
Changes in reservoir response were commonly assessed using classical well tests and analyses.
[ 1 , 2 ] Because classic reservoir simulation in conventional low-viscosity cases deals only with mass and heat transport (Darcy and Fourier diffusion processes) combined with saturation changes and relative permeability calculations, these measures were deemed sufficient for reservoir management. Flow rates (Q), well-test data, and facilities capability analysis are also used for production optimization.
3
These measures are considered insufficient for heavy oil
(HO) thermal extraction, HPHT reservoir management, high compaction cases, and gravitationally-dominated production technologies. In these cases, we are interested in new measures such as the reservoir volume change (
V), gas saturation changes in situ (
S g
), swept volume, and so on. These cannot be measured by conventional p-T-Q methods or even by geophysical wellbore logging. When shear dilation,
1
compaction, or induced fracturing take place, major changes in rock mass properties occur, and understanding what is happening requires different monitoring and simulation methods.
To make monitoring data more useful, flow-stress coupled modeling, also referred to as coupled geomechanical modeling, is carried out. Δp and ΔT are analyzed in terms of effective stress changes through their effect on rock and pore volumes.
The links between volume changes and pressure/temperature changes are established through pressure and temperature compressibilities of the rock.
Geomechanics simulation of large problems is more difficult than conventional reservoir simulation because of the tensorial nature of stresses and strains, leading to more degrees of freedom per node. Also, there remain uncertainties in constitutive behavior models for reservoir rocks, and there is a general inexperience in dealing with geomechanics applications in reservoir simulation.
This article is an attempt to review reservoir monitoring developments and how these data may be used in the future.
Also, it describes what methods are most suited for coupled stress-flow analyses (coupled geomechanics simulation).
Monitoring Technologies
The Nature of Monitoring
To understand how to implement monitoring strategies in practice, it is best to have a clear picture of the nature of monitoring methods in general.
Field or Punctual Measurements
Parameters such as pressure and temperature must be measured at the point where data are needed. These parameters are scalars (independent of orientation), and the value at one point may have little or no relation to the value of another point.
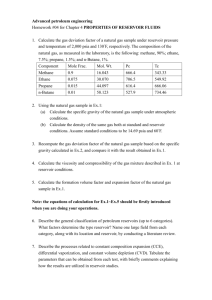
For example, pressure on one side of a bed of 0.5 m intact shale may have no relation to pressure on the other side. Similarly, with convectively-dominated heat flux, temperatures do not form a smooth field of values, but can be highly variable from place-to-place (Figure 1) because of reservoir heterogeneity, fingering, gravitational segregation (steam rises, liquids drop), and other effects. Furthermore, T and p breakthrough can occur suddenly as shales are breached by shearing or fracturing, events which p-T measurements along wellbores are incapable of detecting, and which models cannot predict.
Figure 1: Reservoir heterogeneity, process instabilities
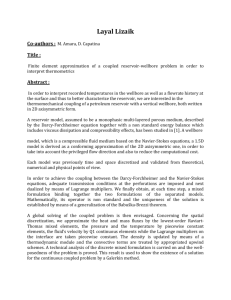
Other physical changes generate a linked field of values. For example, a volume change in part of the reservoir generates a surrounding displacement field with a magnitude that decays with distance. Remote measurements of the effects of volume change are possible because the displacement field is continuous. Similarly, in the case of a shear displacement, which is a discontinuous displacement across a plane, a displacement field is also generated. This shear-induced displacement also can be detected remotely and analyzed to give information about where the shear displacement took place and how large it was. Thus, deep-seated volumetric and shear distortions generate surface displacement fields, as shown in
Figure 2. The upper symmetric curve is the vertical surface displacement (
z) arising from a volume change at depth; the asymmetric curve (a dipole) is the vertical surface displacement arising from a shear displacement at depth. In simple cases, if one can measure surface displacement with sufficient precision, it is possible to calculate the nature and extent of the deformations at depth.
Figure 2: Volumetric and shear deformation fields
Direct contact with the measuring point is needed for measures such as pressure and temperature, as there is no method of remotely detecting
p or
T, only their secondary effects such as
V. One sensor must be in place for each spatial data point, and even if a continuous T distribution along a well is collected, little can be said about the temperature distribution some distance away. This is because in a complex conductive and convective pressure and heat transfer case, the value at one point is not a strong mathematical constraint on the values elsewhere. For example, in Figure 1, heat transfer in the zone below the shale bed is convective (advective), whereas the temperature above the heated zone is governed by conduction rate if the shale is intact. Furthermore, if the pressure in the hot zone is sufficient to generate a breach in the shale, or if the shale dehydrates from the heat, a sudden flux of hot liquid through the zone takes place. Such behavior is difficult to predict, so there is a tendency to try and install a large number of p and T measurement points for model calibration and verification in reservoir engineering.
However, volumetric or shear distortion at a point affects the entire displacement field according to the principles of elasticity. The characteristics of a continuous field
(deformation field, electrical field, gravitational field…) allow powerful mathematical techniques to be used to examine the nature of the “source function” that generated the changes. The volume change at a point generates a displacement field throughout the space, and this can be measured with great precision and analyzed. Similarly, a resistivity change in one
2
region will affect the entire electrical field generated around that region when a voltage excitation is applied. Field such as deformation or voltage gradient change can be sampled remotely and calculations undertaken to specify changes taking place in the zone of interest.
T and
p in a reservoir lead to deformations because of thermal compressibility and effective stress compressibility. If a geomechanics model is available that allows volume changes to be calculated and attributed to
σ
,
T and
p, it may be possible to make inferences about T & p distribution through detailed analysis of the deformation field. This is discussed in detail below.
Snapshots or Continuous Measurements
Some types of monitoring are akin to taking a snapshot, and repeated snapshots over time are used to give an idea of changes that are taking place, just like the family that takes a picture of each child on their birthday every year. Time-lapse 3-D seismic measures are an example of a snapshot technique; another is taking a set of
z measurements at surface survey points every month to try and track reservoir deformations at depth.
Continuous measurements allow identification of “events” that take place over a short time interval. For example, if the deformation field induced by continuous hydraulic fracture from solids injection shows a sudden alteration, it implies that the fracture changed orientation, at least temporarily (Fig. 3).
The “event” in the tiltmeter and BHP data below indicates a sudden change in the deformation field over a period of several minutes, and can only be detected with continuous monitoring.
Fig. 3. Events detected by continuous measurements
Snapshots are analyzed by taking the differences over time.
Suppose we take snapshots of changes in surface elevation -
{
z} – using InSAR technology (see later) where
t is on the order of 40-60 days. To analyze this data, the deformation field is sampled on a regular grid that is large enough to cover the deformation field at depth. Then, mathematical methods are used to estimate the
V/
t and shear displacement over time at depth. Of course, these changes can be distributed in a highly complex manner, depending n the injection and production activity that took place in the time period, the pressures and temperatures used, the well spacing, the nature of the reservoir, and so on.
Passive or Active Measurements
In an active process for monitoring, an impulse of some form is generated, and the response to that impulse is collected by a sampling array. For example, in 3-D time-lapse seismic monitoring, the impulse is a sudden sonic excitation (explosion, vibration…), and the response is the induced wave trains, measured at an array of surface or borehole accelerometers (or geophones). Similarly, in electrical impedance tomography
(EIT), an excitation voltage, perhaps a sinusoidal variation or a step-function in current, is applied across a pair of electrodes, and the induced voltage gradient is measured across many other pairs of electrodes, or between single electrodes and a distant
“ground” (here it is assumed that there is no change).
In time-lapse seismic surveys, the changes in seismic attributes (velocities, attenuations, frequency content, reflection coefficients…) from one time to another in the volume of interest are computed. Because stress changes affect seismic properties, changes in seismic attributes can take place far from any T & p changes. In the case of EIT, the changes in the resistivity structure of the zone of interest can be solved by analyzing the changes in the voltage gradients, and these changes can then be attributed to processes at depth. It is unlikely that there are any significant changes in resistivity except in the process zone, and this fact also helps to analyze the data. In fact, if an analysis is carried out assuming that resistivity changes can only take place in a specific volume, this serves as a very powerful and highly useful constraint on the range of possible solutions. A great part of successful analysis of monitoring data is the choice of appropriate constraints, based on physical reasoning and geological data..
Fig 4: Generating and sampling an electric field
The best example of passive monitoring is microseismic monitoring. Sensors at the surface and in wells are continuously “listening” to the flow of acoustic energy in the earth; however, recording all of the information at a high sample rate (~10,000/s) is not practical. Recording is only done when events occur, and the method is called passive because there is no “excitation” used, the sensors are passive recorders.
Monitoring Methods
In this section, various methods suitable for reservoir process monitoring are listed; some methods useful to geomechanics analysis and coupled reservoir simulation are discussed in greater detail. Signal conditioning, calibration, data transmission and storage, and so on, are not addressed.
Referencing a particular website is not an endorsement of one line of products or a specific method.
Pressure Sensors 4
The following is a partial list of pressure sensing approaches that can be used in reservoir process monitoring:
3
1.
Standard steel diaphragm resistance or capacitance sensors with electronic readout
2.
Quartz (piezoelectric) sensors
3.
Bubble-tube pressure systems (no electronics), single sensors or multiple, coiled-tubing conveyed systems 5
4.
Fibre optics methods, with recent developments for higher T using white-light interferometry 6
5.
Vibrating wire sensors
6.
Micro-electronic mechanisms (MEMS)
Temperature Sensors
1.
Fibre optics methods, punctual or distributed 7
2.
Thermocouple, thermistor and semiconductor sensors
3.
Resistance temperature detectors (e.g. thin film types)
4.
Bimetallic methods plus strain output, other methods such as vibrating wire T gauges, etc.
Seismic (Acoustic) Methods 8
1.
Conventional 2-D (cross-section) and 3-D surveys with fixed accelerometer or geophone sensor arrays, placed at the surface and in boreholes, with controlled-source or impulse methods used for seismic excitation
2.
Microseismic monitoring, including use of microseisms to refine tomographic seismic attribute models
3.
VSP, cross-hole, and other variants and approaches
4.
Time-lapse seismic methods based on above technology 9
Deformation Measurements
1.
Borehole extensometers, casing strain gauges, and other direct techniques with continuous readouts from fixed measurement points in boreholes
2.
Tiltmeters and other high-precision inclinometers in deep boreholes or at the surface (shallow holes), of various types (inclination, bubble type, MEM, etc.)
3.
Surface measurement methods, almost exclusively {
z} measurements, including: [an estimate of precision] a.
Laser leveling survey methods [
z ± 0.5 mm over a 100 m base line], benchmark network b.
Precision aerial photography with targets [
z
± 5 mm over a 100 m base line] c.
InSAR satellite interferometric measurements
[
z ± 5-10 mm absolute] d.
Differential GPS stations [
z ± 1-2 mm absolute is achievable] e.
Other methods
Electrical Measurements
1.
2-D, 3-D, cross-well and VSP EM methods, similar to seismic methods, with various antennae and arrays, including imaging methods 10
2.
Fixed-electrode measurements of changes in an induced potential field (as in Fig. 4)
3.
Controlled source (different frequencies – different penetration depth) fixed or moveable antenna magnetotelluric surface surveys 11
Geophysical Wellbore Logging Methods
1.
Temperature and flow rate surveys in flowing or static wells
2.
Geometric surveys of casing interior including precision gyroscopic surveys, video imaging, caliper measurements, and acoustic (rotating sonic) imaging
3.
Behind-the-casing measurements of natural radioactivity
(
log), density (
-
log), porosity (neutron porosity, actually proton density), resistivity, and other measures.
4.
Casing collar, magnetic ring, and radioactive bullet logs
5.
Borehole gravimetric surveys (microgal precision)
Other Monitoring Methods
1.
Surface gravimetric station array (measuring
g )
Deformation Monitoring
There are a number of techniques for measuring deformation in and around an active reservoir. Because deformation data are so crucial to coupled flow-geomechanics model calibration, some descriptions are provided.
Satellite and Airborne Methods
The three major remote surface deformation measurement approaches are aerial photography, radar interferometry
(InSAR), and differential GPS measurements.
12 The first two are “snapshot” methods; the latter gives a continuous read-out at a reasonable sample rate (e.g. a measurement each 10 seconds…). All three methods should be supplemented by two intersecting level survey lines on the ground to insure calibration and provide a known baseline.
Aerial photography uses repeated low-level flights collecting high-resolution overlapping photographs (Figure 5). Ground points appear in 8 to 10 photographs, and special fixed targets, such as a horizontal 0.5 m white plywood disk, can facilitate analysis. A selected array of surface points or a grid (e.g.
100×100 m) is analyzed for relative elevation using digital photogrammetry and subtracted from the previous overflight data to give {
z/
t}. Snow and dense vegetation cause problems, and resolution is better than 5 mm over 100 m.
Fig 5: Multiple overlapping aerial photography
InSAR is based on periodic satellite overflights that collect radar reflection images using a single short wavelength. Superposition of the two monochromatic images gives a wave interference pattern resolvable to sub-centimeter precision because of the short wave length. The interference pattern gives a contour diagram of
z. Wet snow, clouds and dense vegetation cause problems, and resolution is in the 2-5 mm range. A few metallic corner reflectors are installed to give high reflectivity points, but any relatively flat, fixed reflecting surface gives reasonable reflectivity.
Differential GPS (global positioning system) uses an array of fixed, high-precision GPS stations that each compute relative
4
elevation (hence differential) based on thousands of repeated measurements with respect to overflying satellites in a short time, such as 10 seconds. {
z/
t} for the array stations is computed regularly. Millimetric resolution (1-10 mm) can be achieved, and 20-40 GPS stations might be considered for a project. Because of some systematic imprecisions in the GPS signals, even though data can be collected frequently, it is important to use averages over some time interval that is much longer than the sampling interval in order to have confidence in results.
Airborne laser or radar ranging can also be used to measure ground surface movements to accuracies less than 10 mm.
13
Fixed Ground Surface Methods
Although
L (i.e.
x,
y) between fixed reflective targets using double-frequency (interferometric) laser distance ranging is feasible and is widely used in monitoring mine pit wals and slopes, for example, this is generally not done in petroleum projects. This is because the magnitudes of horizontal movements are far less than the vertical movements, and it is considered to be more challenging to install stable reflective points and measure then systematically. Nevertheless, in principle, measures of
x and
y at the surface are feasible and can be incorporated in data analysis.
Laser leveling of an array of monuments anchored 5-10 m below surface to eliminate short-term surface effects (e.g. from ground moisture changes) gives {
z/
t} to precisions of approximately 0.5 mm over a 100 m baseline. At least two lines that extend 3×Z beyond the project boundaries are needed to provide “fixed” reference points. From 40 to 500 survey monuments may be installed, and pre-analysis allows the density of monuments to be planned so that more information is obtained in regions of rapid changes of {
z/
L}.
Fig 6: Various deformation measurement methods
Inclinometers and tiltmeters of various types can be installed in shallow boreholes or on rigid surfaces (e.g. concrete slabs) to give tilt, which is a vector that comprises tilt magnitude and tilt direction (
θ, Az).
14 Civil engineering inclinometers have precisions of ~10 -6 radians, geophysical bubble tiltmeters can achieve ~10 -8 radians, but suffer from gradual base-line drift.
These high precision devices can detect
θ equivalent to a change of
z of 2-5 mm over a baseline of 1 km. Typically, from 20 to 60 tiltmeters might be installed, and they provide continuous read-out, in contrast to a level survey, which provides a “snapshot”.
Direct Subsurface Deformation Measurements
Because the magnitude of deformations decay by outward spreading, better resolution can be achieved by installing subsurface measurement devices closer to the zone, or even within the zone. Subsurface installation requires a wellbore, which can be a dedicated monitoring well, or in some circumstances an injection/production well. T, p and safety issues arise in the use of injection/production wells.
In non-thermal wells, many types of direct strain or deformation measurements can be made.
L measurements along the axis of the wellbore can be made with geophysical logs detecting casing couplings or pre-placed formation radioactive bullets, or strain gauges and other devices can be installed behind the casing. Precision gyroscopic surveys and interior casing profile measurements can also be made to determine changes in inclination or to detect incipient casing shear, or even subtle changes in ovalization that could be linked to changes in the surrounding stress fields.
15 Within the well, wire extensometers anchored at several points in and above the formation can serve to localize deformations, or other special installations can be used, such as a string of precision tiltmeters.
These installations generally require a well dedicated to monitoring, and it can be used for multiple functions, simultaneously collecting microseismic data, deformation data,
T and p data, and even electrical information if a fiberglass casing is installed.
Active and Passive Seismic Monitoring
Seismic waves are strain waves (mechanical waves) and microseismic emissions are bursts of strain waves emitted by the stick-slip of shear rupture under high deviatoric stresses.
Properly used, these monitoring methods can link well with geomechanics simulation.
Active Seismic Monitoring – Time Lapse 3D Methods
Seismic wave velocities are a function of density and the dynamic elastic properties (ρ, E,
); furthermore, E and
are not isotropic in the earth, therefore v
P
and v
S
are tensorial quantities. Elastic wave amplitude attenuation is a function of geometric spreading and non-elastic strain losses (neglecting adiabatic compression effects). Other properties, such as reflectivity of a bed, are related to velocity contrast and gas saturation. The subject of use of the full set of seismic attributes in geomechanics analysis is too large to address here, only the example of seismic velocities and shear wave amplitude is presented. Furthermore, although seismic properties are tensorial, we will assume they are independent of direction (a serious oversimplification).
High-resolution 3-D seismic surveys taken at different times can map changes in seismic velocities to a precision better than
1%. Also, strain-wave velocities in clastic materials such as shales and sandstones are weakly dependent on the effective stress, perhaps written as a power relationship: v
P
a
b
o
n
, v
S
c
d
o
m
................................ (1)
Here, the compressional wave velocity is an empirical function of the effective stress, σ
, normalized with respect to a baseline stress, σ o
. Exponents n and m are usually between
0.16 and 0.25, depending on the nature of the rock.
Using this relationship and a geomechanics simulation that provides σ
values, it becomes possible to use 3D data as a method of model calibration and tracking a process. Outside of
5
p
S
D
T
σ
p
S
T
σ
D the reservoir zone, where T & p are constant, the velocity-stress interpretation is robust; inside the reservoir zone, where we have
T,
p,
S g
as well as
σ
, interpretation is difficult because of combined effects (Figure 7).
Similarly, attenuation coefficients (Q p
) can be used to help analyze and interpret in situ processes. As pore pressures rise toward the least minimum stress (p
σ
3
), grain-to-grain contacts become more-and-more dissipative of strain wave energy, so that wave amplitude is reduced. In fact, shear waves will disappear if there are no grain-to-grain contacts under an effective confining stress.
…as σ goes up,
Fig 7:
Changes in T, p, σ
lead to seismic changes
Within the reservoir, especially in unconsolidated sandstones, much of the change in seismic attributes is not reversible because of shear dilation under high deviatoric stresses and high pore pressures during injection cycles. The degree of permanent deformation can be calculated from deformation measurements, and this can help calibrate stressseismic models, albeit with remnant uncertainty.
Passive Seismic Monitoring
Stress changes induced by
T and
p lead to high localized shear stresses, such as in front of thermal fronts or along lithostratigraphic interfaces (i.e. contrasts in elastic properties –
Figure 1). When these shear stresses exceed the strength of a strain-weakening rock, stored elastic strain energy is suddenly released, generating a burst of elastic waves, called a microseismic event. This event must be collected and analyzed by an array of geophones or accelerometers, placed within a borehole, behind the casing, or exceptionally at the surface, although systematic recording of small seismic bursts at the surface is problematic in most environments.
Many seismic events take place, and to perform analyses, the strain waves must be sampled at a high rate (~10,000 16-bit samples per second per channel) along three or four axes. In a typical array, there may be 10-20 accelerometers in place, and each one also has a timing channel, giving on the order of 5-10 million bits per second, not counting any analysis. Thus continuous data registration requirements are impossibly huge, and event-triggered recording based on special algorithms is used to record the largest 2000-4000 events per day, each event lasting approximately 0.2 seconds. In fact, 2-5 seconds total time is recorded per event to capture the wave train at all accelerometers. Once quality control parameters are applied, from 300 to 1000 events per day are collected and analyzed.
6
Fig 8: Microseismic emissions localization
Mapping location (Figure 8), time and energy release
(seismic moment) gives a capability to track fronts (e.g. a thermal front is a strong emitter), to estimate the distance of pressure transmission, and to identify regions of high shear stress. Furthermore, individual events with good records on four or more accelerometers can be analyzed to give slip magnitude and slip direction, which in turn gives information as to the orientation of the stresses.
It is presumed that a microseismic event happens when the rock mass (for generalized shearing) or the interface (for localized shearing) is at the critical stress value, which can be taken to be a characteristic of a rock or an interface. Thus, loci of continued shearing in the body of the reservoir during heating or increased pore pressure are regions where the rock is at a critical stress condition.
Outside of the reservoir, where
T,
p and
S are negligible, interpretation of the causes of microseismic events is easier: they can be attributed to large-scale stress redistribution arising because of volume changes within the reservoir and the within the zone near the reservoir. Furthermore, if microseismic events localize on an interface (e.g. the interface between the sandstone reservoir and the shale overburden), it may be possible to do stress analyses using a geomechanics model to clarify the magnitude of volume change within the reservoir needed to generate the slip.
Another use of microseismic data is the refinement of the seismic earth model. High-resolution 3D seismic surveys generally use fixed geophones (or accelerometers) and the excitation can be a vibrating source or an impulse. To reduce error, the impulses are applied at the same locations from survey to survey, but they are almost always at the surface, therefore the angle of impingement on the strata is acute.
Induced microseisms themselves may be used as sources for the seismic array once the event location is accurately determined.
This allows dynamic re-computation of the distribution of velocities and other attributes, both updating and refining the seismic earth model repeatedly without having to re-execute a surface 3D survey. (More rapid evolutionary algorithms are needed for this task, but when they are developed, a dynamic
3D seismic earth model can be generated.)
Seismics and the Geomechanics Whole Earth Model
The “earth model” is a 3D model of the lithostratigraphic disposition and physical properties of the reservoir and it surroundings. Defined surfaces are part of the model, obtained from seismic reflections and lithological data, and core analyses combined with geophysical borehole log data can be used to determine petrophysical and mechanical properties. Now, to extrapolate this data to the inter-well region, a particularly challenging task when there are only a few wells, it is necessary
to use a high-resolution 3D seismic data base. Borehole data are used to calibrate an interpretive model so that the attributes that characterize a particular unit (called a GMU – a
GeoMechanical Unit) can be identified between wells, and even extrapolated to the regions beyond wells. Because this can usually be tied explicitly to seismically reflective surfaces, the geometric disposition of the GMUs can be determined. This allows an earth model to be assembled, and the geomechanics model will be based on the use of seismics to interpolate between wells. To avoid excessive model complexity, usually a limited number of GMUs are defined (6-20), and usually these are chosen to correspond as well with clear lithostratigraphic units. In each GMU, a set of identical mechanical and petrophysical parameters is usually stipulated (although stochastic simulation can be used to vary parameters to simulate heterogeneity at various scales).
A simple example is given in Figure 9. Here, the stiffness, based on core measurements at wells, was interpolated between wells using a 3D seismic survey. The data come from the
Daqing Oilfield in Heilongjiang Province, China. The stiffnesses (along with other mechanical parameters) were used to predict hydraulic fracturing treatment response so that preliminary design could take place, and were also used for more general stress-strain analyses of the reservoir response o high injection pressures.
16,17
Fig 9: Cross-Section of a
Young’s Modulus Earth Model
Geomechanics and Coupled Modeling
Just as {T} and {p} monitoring data are vital to conventional reservoir simulation, allowing validation, calibration and history matching, data on volume changes (deformations) and seismic attribute changes are vital to geomechanics flow-stress coupled simulations.
Coupling Flow and Stress
In mathematical simulation, flow is linked to stress through volume changes (
V). In all cases, the volume is the critical coupling parameter. To understand coupling, consider a process that causes a volume change (porosity change) in the rock around a wellbore.
A porosity change must lead to fluid flux.
Fluid flux necessitates a change in pressure.
A change of pressure means a change in effective stress.
A change in effective stress generates a volume change.
Thus, stress changes are coupled with fluid flow.
Because of this coupling, correct analysis of flow in compressible porous media requires simultaneous stress
7 analysis. Well-test equations, for example, are completely uncoupled solutions: no
σ′ effects are accounted for in conventional well test interpretation software, though some limited coupled solutions do exist.
18
Reference to another article in these proceedings will help in understanding the approach to stress-flow coupling.
19 A general coupling of stresses, pressures and temperatures requires an equilibrium equation of the form:
G
2 u
( G
)
div u
( 1
K
K m
)
p
K
s
T
0
(5)
In this equation, the first two terms are the effects of displacements on the stresses, the last two terms the effects of the pressures and the temperatures. In each case, the effect is expressed as a volume change (or as a generalized strain tensor), and behavioral parameters (Lamé elastic parameters G and
, as well as the effective stress and thermal compressibilities). Clearly, the coupling of the displacements and the temperature, pressure and stress changes is achieved through the compressibilities and elastic properties. Note that in a more general approach these can be tensorial values to reflect the anisotropy of materials such as shale.
Physical Parameters and Initial Conditions
Geomechanics simulation requires that initial conditions and physical parameter relationships be stipulated. The initial conditions are the stresses and temperatures. Vertical stress is the overburden weight, pressure is easily measured, the least principal stress can be accurately estimated with hydraulic fracture measurements, thus the only difficulty in stipulating the virgin stress distribution is usually in assessing the magnitude of the largest horizontal stress σ
HMAX
.
Physical parameter relationships are far more complicated in coupled geomechanics problems because of the non-linearities that arise and because the relationships remain ill-defined in practice. Because this issue is so large in practice, it is almost impossible to easily define. For example, when a sandstone experiences general (pervasive) shear dilation in front of a thermal front, the entire sandstone is experiencing general shear and related dilation. However, the boundary conditions for this in situ process are a combination of stress and displacement boundary conditions and may approximate plane strain in the
“third” direction. Testing such strain paths in the laboratory is next to impossible, so the value of monitoring data and empirical functions to simulate behavior is necessary. These empirical functions must be estimated from factors such as volume changes, therefore it is necessary to collect deformation data and compute volume changes and shear distortion in the reservoir, as much as such a task is possible.
Inversion and Forward Modeling
Once an efficient coupled flow-stress model is functioning for a particular project, it is possible to collect monitoring information and perform inversions, forward modeling, or combinations of the two.
Deformations
If the source of the deformations is geometrically simple, such as a single reservoir layer undergoing volumetric and shear distortion, it is possible to measure the deformation pattern remotely and analyze it to give the volume changes in the reservoir horizon (Figure 10). Complex cases (Figure 11) are extremely difficult to analyze, no matter what method is used,
because the larger the number of layers, the more indeterminate the problem.
{ Δz}
{ ΔV}
{ { ΔV} = [K] -1 ·{ Δz} , (N > M)
Fig 10: Solving {
V} for a single reservoir horizon surface heaves, each zone
Fig 11: Many Zones Lead to Irresolvability
– no Inversion
Direct Inversion of Surface Data
The most common (and cheapest) case is measuring vertical surface deformation, {
z}, over time (InSAR, survey, GPS…).
An estimate of {
V} at the reservoir can be achieved by subdividing it into rectangular source elements, and distributing
{
z} so as to minimize the error of estimation. This can be done extremely rapidly by using special mathematical and statistical techniques.
20 It involves inverting a set of linear equations of the form {
z} = [ K
]·{
V}, where [ K ] is a full coefficient matrix. Unfortunately, this only gives {
V}, and does not give any information about shear distortion.
Similarly, precise tilt values could be used in the inversion process, or surface values of {
z} could be supplemented by down-hole deformation and tilt values. If actual data are available in the reservoir, these can be used as constraints to the overall solution as well, “forcing” the solution to honor those data points that we are very confident in.
Analyzing Surface
z Including the Effect of Shearing
Shear distortions take place during
p &
T processes, particularly if p inj
≥ σ
3
is taking place because the frictional strength is ~zero under this condition (σ
~ 0). Whenever a large-scale steam injection episode takes place in a poorlyconsolidated sequence at p inj
≥ σ
3
, large low-angle shearing planes develop. Furthermore, shear slip along interfaces takes place because of differential volume changes (Figure 2). To obtain estimates of the size of the shear planes, it is necessary to use a method that introduces shear planes in an explicit manner.
DD elements are used to define slip and {
V}; each element is a rectangular plane (L, W) at a certain orientation (Θ, Ψ), tied to a specific point in space (X, Y, Z), with three displacement components, δZ normal to the DD plane, and δX, δY slips parallel to the DD plane. Thus, each DD has 10 variables that must be determined, so that if there are 200 surface {
z} values, a maximum of perhaps 15-18 DD planes can be used.
(Note that {
x} and {
y} values could also be used to good effect in these approaches, although they are seldom collected.)
A surface map is shown schematically in Figure 12. Small symbols represent wells, yellow planes are subsidence with the mean subsidence listed in the rectangular solution plane. Red planes are dilation planes, with normal heave as the first number, down-dip slip magnitude as the second number, and the dip given in degrees in the corner of the plane.
-38 mm m m
11
º
-71 mm
Fig 12: DD Solutions for
V as well as for Shear Slip
The solution method used for this is called “forward optimization”. Subject to constraints, a reasonable solution is guessed, and error between the guess and the real data is minimized statistically. The “best” solution is a representation of reality only; though quantitative, calculated values are gross averages for the area of the DD. This approach has been successful in identifying potential casing shear problems before they actually happened.
Using a Coupled Geomechanics Simulator for Solutions
It is not feasible to use a large-scale, fully-coupled geomechanics simulator as the means of generating a solution and then finding the best solution by minimizing the error in some statistical manner. This is because the execution time for the geomechanics simulator is substantial, and the number of degrees of freedom is huge. Furthermore, much of the
V is associated with irreversible dilation and irreversible shear slip.
Once a general distribution of shear distortions and
V is available, this is used as input to the geomechanics model so that simulator predictions in the reservoir zone are realistic.
This requires that dilation and shear distortion be included, which makes execution time longer because of plasticity effects.
Also, the more different parameters and non-linearities used, the more difficult it is to achieve any reasonable match between the measurements and the calculated predictions. To achieve any success in this regard (e.g. history-matching), it is important that the geomechanics model be well-designed.
Now, and for the foreseeable future, it will not likely be possible to use a complex coupled geomechanics simulator to
8
analyze deformation monitoring data in a true history matching mode. Two possibilities exist (these are speculative possibilities, as they have not been done yet in practice).
First, it may be feasible to use a much less detailed geomechanics model (e.g. 500-1000 elements instead of
>100,000). This model can take as input the general average values for the details from the full model, and provide a gross solution that can be made to approximate the raw monitoring data or the solution (inverted data) from the DD inversion.
Second, the full geomechanics model can simply be used to predict the volumes and deformations, with a check that the solutions are in reasonable accord with the observations, without great concern that the specific values are erroneous.
Seismics
Is it possible to use seismic data to calibrate a coupled geomechanics model? This is a question that remains unanswered, but there is promise in this direction, especially because there is a good chance that time-lapse seismic data can give an estimate of the stress changes over the
t period. In the next few paragraphs the approximate procedure for such an approach is given, assuming that deformation data are also available.
W
/2 The
“rest-of-the-world”
Reservoir zone of
ΔT, Δp (diffusion) zone of dilation,
ΔT, Δp, ΔS, etc.
Fig 13: Reservoir, Tp zone, and the “Rest-of-the-World”
Figure 13 is a reservoir in a medium. Within the porous permeable reservoir, the following processes are taking place:
Changes in pressure are leading to shear dilation, shear distortion, compression and expansion.
Changes in temperature are leading to thermoelastic expansion, but also to thermal-stress-induced shear dilation and distortion.
Phase saturations are taking place as well as changes in porosity and permeability; these can dramatically affect the flow rate (pressure diffusion, convective heat transport…), and will also alter the seismic information.
The reservoir effective stress changes and volume changes are reacting with the surrounding elastic rocks, setting up global changes in stress and a global deformation field.
Surrounding the reservoir is a zone (T-p zone) where there is also some
T and perhaps even some
p, leading to a small amount of volume change and shear distortion. There is littleto-no shear dilation, saturation or permeability change in this region. In general, effects in this zone will be limited by the thermal and pressure diffusion rates, and if the surrounding strata are intact shales, these diffusivity parameters will be small. Nevertheless, even though the volume changes in this region will be less than an order of magnitude of {
V} in the reservoir arising from compressibility effects, shear dilation and distortion, it is possible to include the effects in numerical analysis.
However, outside of this second relatively limited zone is a vast region where there are no effects except
σ
, which should have an effect on the seismic velocities. It therefore seems feasible, outside of the reservoir region, to measure seismic attributes changes and to compare them to the stresses predicted in the geomechanics simulations. This gives an independent method to calibrate or verify the “correctness” of the coupled geomechanics model, which can be also calibrated to some degree with the deformation field. a: σ b: σ
Fig 13: An example of computed stress changes
As an example, Figure 14 shows the effective stress changes along the main diagonal of a rectangular reservoir 840 m on a side, 20 m thick, 1000 m deep subjected to overinjection of water. There are significant stress changes outside of the T, p zone. In principal, using these stress changes along with highresolution seismic changes will further the usefulness of coupled geomechanics simulation, particularly in combination with deformation measurements.
Conclusions
Advances in coupled reservoir geomechanics simulators are making them useful for thermal and cyclic pressurization processes. More advances are needed to incorporate shear induced dilatancy, shear plane propagation, and thermal- and pressure-induced volume changes. These cannot be dealt with separately because thermal- and pressure-induced stress changes lead to regions of high shear stress, which lead to the phenomena of dilation and shear slip along natural (lithological) or induced interfaces (flat hydraulic fracture planes).
9
Coupling within the geomechanics simulator must be achieved through the volume changes, as these drive the changes in effective stress. This is a challenging problem because of non-linearity, irreversibility, and a lack of sufficient and appropriate behavioral laws. This difficulty in turn leads to the conclusion that monitoring is needed to further develop and calibrate models in practice.
There are two types of monitoring data that are particularly valuable for geomechanics simulation: volume changes and shear distortions (i.e. deformations) and seismic data. Volume changes and shear distortions within the reservoir can be computed from deformation data (e.g. surface {
z} data) provided that a model exists to mathematically (and statistically) link the data to the reservoir behavior. This can be done for cases that are not too complex, such as a single reservoir zone project. Multiple zones increase uncertainty so much that many additional constraints are needed in the form of additional measurements at depth, within the reservoir, and these are costly.
The second type of monitoring data, little used in coupled geomechanics calibration, is seismic attribute changes arising from process effects. For example, seismic velocity changes well outside of the reservoir zone can be measured, and these can be linked to effective stress changes. Such stress changes over large areas can be generated by the volume changes that take place in the reservoir. In additions to seismic velocities, if passive microseismic measurements are made, the loci of activity will correspond to loci of high shear stresses leading to stick-slip yield. This information, combined with estimates of the shearing resistance of the rocks involved, can also help calibrate coupled geomechanics models. Furthermore, seismic data can help generate the initial geomechanics model (the static parameter model) to be used for analysis.
It is recommended that any in situ project establish a highresolution 3D seismic data baseline as well as a surface {
z} measurement scheme (InSAR, GPS, tilt, surveys…) as the minimum initial information base. Consideration should be then given to deploying accelerometers at depth for a microseismic array, as well as some means of measuring deformations at depth (borehole tiltmeters, extensometers…).
Also, the project should establish a coupled geomechanics simulation capability to analyze stress and volume changes so that the maximum value is extracted from the monitoring data.
In this way, better predictions can be made, and better planning can be implemented in future projects. As a simple example, quantification and tracking the temperature-induced shear dilatancy effect around steam-assisted gravity drainage chambers would help decide whether going to low-pressure
SAGD is worth the reduction in permeability enhancement that accompanies higher effective stresses that tend to suppress the dilatancy. Other benefits of a similar nature can be defined for high-pressure cyclic steam injection, predicting and tracking
{
V} in compacting reservoirs, surface effects associated with massive sand withdrawal or solids injection, and so on.
REFERENCES
1 EHLIG-ECONOMIDES, C.A., Well Test Analysis for
Wells Produced at a Constant Pressure, PhD Thesis,
Stanford University, 117 p, 1979.
2 SCHLUMBERGER Ltd. Well Test Interpretation, electronic textbook, 2002 available at: http://www.slb.com/content/services/testing/data/well_te st_interp.asp
3 SINHA, S.P., AL-KANDAR, I. and KHALAF AL-
ANEZI, K., Using an Integrated Approach to Production
10
Optimization in a Mature Field: Burgan Field, Search and Discovery Article 40182, 11 p, posted 2006.
4 General mensuration web site: www.sensorsportal.com/index.html
, 2007
5 PROMORE Ltd. www.corelab.com/Promore/ , 2007
6 OPSENS INC. www.opsens.com
, 2007
7 SENSA (Div. of Schlumberger), www.sensa.org
, 2007
8 MCGILLIVRAY, P.R., BRISSENDEN, S., BOURNE,
S., MARON, K. AND BAKKER, P. Making Sense of the Geomechanical Impact on the Heavy Oil Extraction
Process at Peace River Based on Quantitative Analysis and Modeling. Proc SPE Annual Technical Meeting,
San Antonio TX, SPE # 102876, 2006
9 ZOU, Y., BENTLEY, L.R., LINES, L.R. and
COOMBE, D. Integration of seismic methods with reservoir simulation, Pikes Peak heavy-oil field,
Saskatchewan. The Leading Edge, June 2006, 746-781
10 KIRKENDALL, B. AND ROBERTS J. Electromagnetic Imaging of CO
2
Sequestration at an Enhanced-Oil-
Recovery Site. Lawrence Livermore Nat. Lab. Report
UCRL TR 204708, 2004, 35 p.
11 HOBBS, B., ZIOLKOWSKI, A. and WRIGHT, D.
Multi-Transient Electromagnetics (MTEM) – controlled source equipment for subsurface resistivity investigation. Extended Abstract, IAGA WG 1.2 on Electromagnetic Induction in the Earth 18 th Workshop El Vendrell,
Spain, September 17-23, 2006, 3 p.
12 www.eijournal.com
Earth Imaging Journal, has many articles on the technologies discussed in this section.
13 BOCK, O. AND THOM, C. Sub-Cm Subsidence
Measurements With The Wide-Angle Airborne Laser
Ranging System, Earth and Environmental Sciences,
Surveys in Geophysics, V 22,5-6, 537-548, 2001
14 Sites such as www.geomechanics.com
and www.pinntech.com
provide information and articles which may be downloaded.
15 HAN, H.X., DUSSEAULT, M.B., XU, B., AND PENG,
B., Simulation of tectonic deformation and large-area casing shear mechanisms - Part B: Geomechanics. Proc
Ameri-can Rock Mechanics Assoc. Conf., Paper
ARMA/USRMS 06-1004, Golden CO, 2006.
16 DUSSEAULT, M.B., YIN, S., ROTHENBURG, L. and
Han, H.X., Seismic Monitoring and Geomechanics
Simulation. The Leading Edge, June 2007 (in press).
17 HAN, H.X., DUSSEAULT, M.B., XU, B. AND PENG, B.,
Simulation of tectonic deformation and large-area casing shear mechanisms - Part A: Operations. Proc.
SPE/EAGE Annual European Conf, SPE # 100360, 2006.
18 ROTHENBURG, L., BRATLI, R.K. and DUSSEAULT,
M.B. A poroelastic solution for transient fluid flow into a well; PMRI Publications, University of Waterloo,
Canada, 1994. (available from authors)
19 YIN, S., DUSSEAULT, M.B. AND ROTHENBURG, L.,
Fully Coupled Numerical Modeling of Ground Surface
Uplift in Steam Injection, Proc. Can.. Int. Pet. Conf.,
Paper 2007-048, 2007 .
20 DUSSEAULT, M.B. AND ROTHENBURG, L., Deformation analysis for reservoir management. In Oil & Gas
Science and Technology - Revue de l'IFP, v 57, N o 5, pp
539-554, 2002.