Demonstrating the style for the Journal of Physics
advertisement

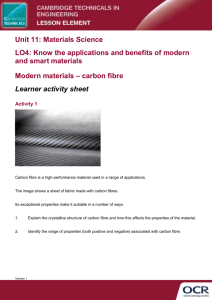
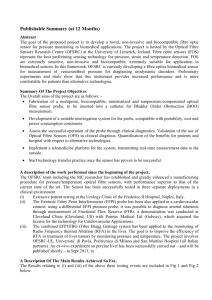
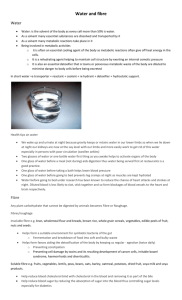
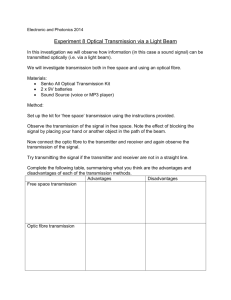
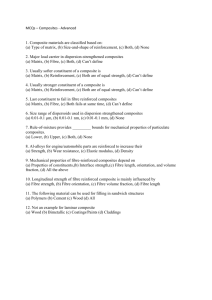
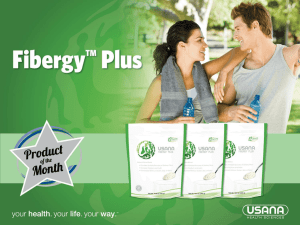
Photonic guided path tomography Samuel Joshua1, Yee Man Keung2, Patricia Scully2, Krikor B.Ozanyan1 1 School of Electrical and Electronic Engineering, 2School of Chemical Engineering and Analytical Science, The University of Manchester, PO Box 88, Manchester, M60 1QD UK. k.ozanyan@manchester.ac.uk Abstract. The basic concepts of the recently introduced Guided-Path Tomography (GPT) are reviewed, with emphasis on the possibility to measure the spatial distribution of various fields on non-planar surfaces. As opposed to a previous demonstration of GPT with low-frequency EM fields (down to DC) for temperature imaging, we show that guided paths can be achieved by optical fibres, which can be sensitise, in this case, to bending. We demonstrate Photonic GPT for imaging of deformation on a quasi-planar surface utilising specially developed and manufactured Plastic Optical Fibre (POF) curvature sensors. The performance of the individual sensors are studied in a low-curvature regime by validation with a strain-gauge and highcurvature regime, where significant bends on the POF element were introduced. A full set of the forward-transformed data from 16 line integrals and 4 projections at 45o was obtained with a phantom object by carefully planned measurements on a single POF element. Image reconstruction was performed with a simple ART algorithm. 1. Introduction Strain measurement systems are needed and widely deployed in the field of health monitoring of structures in a range of engineering industries including the aerospace, civil, automotive, and marine sectors. Optical fibre sensing systems have attracted considerable attention and have been widely demonstrated as highly promising technology for strain measurement systems. Fibre optic sensors offer many advantages over conventional strain sensors; these include their insensitivity to electromagnetic fields, light weight and minimal intrusiveness. Plastic Optical Fibres (POF), with their inherent fracture toughness and flexibility, as well as simplicity of handling, makes them much more desirable in field applications than their glassbased counterparts. Various POF sensors have been demonstrated, sensitive to a number of chemical and mechanical parameters of interest in the industrial and other sectors. Guided path tomography (GPT) is a new concept in tomography and has been introduced as a method for imaging on non planar surfaces by measurements at their periphery [1]. The principal motivation is the possibility to obtain the spatial distribution of a given quantity F(x,y,z) on real or virtual non-planar surfaces, by employing a flexible sensor, which assumes the shape of that surface. Combining the concepts of GPT and POF sensing, it becomes possible to build a GPT system for mapping deformation in a non planar surface. Tomography is based on taking measurements from the periphery of an object and solving the inverse problem to reconstruct the object. The measurements are in the form of line integrals of the imaged parameter. In Computer Tomography (CT, typically with X-rays), the line integrals are along straight lines, as is the beam propagation (eq.1). L Φ Φ 0 μ ( x )dx (1) 0 Here μ(x) is the imaged parameter varying in space, Φ is the photon flux and the integration is along the straight line L. In the theory of CT, this approach is suitable only for cross-sections of flat objects (2D imaging). However, there no requirement for the line integrals to be along straight lines, and if that common perception is abandoned, it is possible to use a huge arsenal of reconstruction methods on measurements resulting from line integrals along curved lines. A demonstrated example is the “temperature mat”, where integrals of resistivity are taken along wires, which can be bent to assume the shape of curved surfaces (2.5D imaging) [1]. L 1 R ρ(T( x ))dx A0 (2) Here ρ(T(x)) is the temperature dependent wire resistivity, A and R are the sensor wire cross-sectional area and total resistance respectively and the integral is along the wire (straight or not). Eqs (1) and (2) show clearly the similarity between the two line integrals, but they offer different functionality in the two cases. It is clear from the above, that guided paths can be achieved in ways other than just confine current within wires. We have applied this concept to guiding a much higher frequency EM field (visible light) by means of optical fibres, incorporating sensor sections to yield the required line integrals. 2. Optical fibre sensors Optical fibre sensors were fabricated from 1 mm diameter polymethyl methacrylate optical fibre by cutting transverse grooves into the fibre along its length, This method, compared to tapering by extrusion or chemically etching, preserves better the fibre integrity and is easier to implement in large numbers along the length of a single stretch of fibre. Both hot or cold scalpel techniques were applied and the latter was found to be more reliable (fig 1a), as substantial material displacement takes place at higher temperatures of the cutting edge (fig 1b). a) b) Figure 1: Images of grooves fabricated by cold (a) and hot (b) scalpel technology The grooves sensitise the fibre to stretching and bending, as shown in fig 2. It is notable that sensitivity is observed in both directions of deviation from the zero deformation: the overall light throughput decreases when the sensor is stretched or bent in direction opposite to the grooves (fig. 2b) and increases when the sensor is compressed or bent in the direction of the grooves (not shown). A quantitative description of the light losses as a function of the groove geometry has been given previously [2] by introducing a light de-coupling factor as a function of the groove opening angle. A similar description is possible for the case of bending and will be given in future work. a) zero deformation b) stretch and bend Figure 2: Compared to the case of no deformation (a), the loss of light propagating through the sensitised fibre is greater when the fibre is stretched or bent (b). The transversal groove method has previously been used to form a fibre strain sensor with a drag element as a flow sensor [3] for wind, but has not yet been evaluated as a distributed sensor with uniform sensitivity along its length. Such uniformity is required in order to ensure that a line integral of the type shown in eq.(1) describes the measurements reasonably well.. This is generally achievable if the losses at each groove are kept low, and can be understood in the light of a linear approximation of the exponential light attenuation along the fibre (Beer-Lambert law) in the small-signal regime. Systematic tests were carried out on 1m POF elements with up to 100 groves and varying groove depth. The issue of uniform sensitivity was examined along the fibre by placing a cylindrical object with radius 60mm and mass 5.37kg on the fibre, which was fixed to a thick underlay of deformable foam. The typical signal-to-noise ratio observed in these experiments was SNR > 1000. depth of modulation 0.1mm groove, 75 grooves 1.02 0.02 1.01 0.01 1 0 0.99 -0.01 Series3 0 20 40 60 80 100 0.98 -0.02 distance(cms) Figure 3: Relative sensitivity to placing a 5.37 kg object on a 1 m fibre sensor as a function of the distance along the fibre. Fig 3 shows the spread in the individual measurements in the case of 75 grooves, each of depth 0.1 mm, over the middle 60 cm section of the POF element. Here, the signal (induced change in the transmitted intensity) at all positions between 22 and 60 cm is taken as reference and the deviation in the rest of the measurements are indicated relative to that signal. The spread is within 1.5%, indicating a good linear approximation leading to uniform sensitivity. This is also visualised in fig.4, where the intensity of the light lost from each of the grooves appears to be similar along the whole length of the POF element. Figure 4. Visualisation of the losses at the individual grooves. 3. Application to Tomography To demonstrate the suitability of the POF sensor for tomography imaging, a phantom object (fig 5a) has been simulated by measurements taken with a single POF element for 62 line integrals in 4 projections separated by 45o. This corresponds to a typically low spatial sampling situation, but is indicative of realistic scenarios where the available resources, as well as practicalities, limit the measurements. The observed standard deviation for a single channel measurement is 0.7%. The recorded data from the 62 measurements was used for standard image reconstruction by a simple Algebraic Reconstruction Technique, which is also popular for under-sampled Computed Tomography, where iterative methods have to be used. The results from a single iteration are shown in the reconstructed image of the phantom (fig 5b). The reconstruction grid is 16x16 pixels, each pixel corresponding to 5x5cm.The reconstruction quality is unaffected by addition of up to 6% noise. The artefacts in the reconstructed image are a cumulative effect of the measurement errors and errors from the mathematical procedure. a b Figure 5: (a) phantom object; (b) reconstructed image of the phantom object 4. Conclusion Photonic GPT imaging of deformation on a quasi-planar surface has been successfully demonstrated, utilising grooved POF strain sensors. The latter have been optimised for transmitted intensity and sensitivity with groove number. Linear attenuation was achieved along 1m fibre sensors, resulting in the identical response at identical pressure on different sections of the sensor. A full set of forward-transformed data was obtained from measurements on a single POF element and inverse-transformed by a simple ART algorithm. The implications of these results can be discussed and taken further along the lines of the design and manufacture of inexpensive embedded and/or disposable non-planar deformation imagers, e.g. of strain in structures, respiratory changes for health monitoring and others. References [1] K B Ozanyan, S Garcia Castillo and F J Parra Ortiz, “Guided-path tomography sensors for non-planar mapping”, IEEE Sensors J. 5 (2005) 167-17. [2] Rekha Rebecca Philip- Chandy, “Fluid flow measurement using electrical and optical fibre strain gauges”, PhD Thesis, Liverpool John Moores University,1997. [3] R Philip-Chandy, P J Scully and R Morgan,“The design, development and performance characteristics of a fibre optic drag-force flow sensor”. Measurement Science and Technology 11 (2000) N31- N35