3.1. K-winners-take-all neural circuit
advertisement

Self-Optimizing Neural Network for Dynamic Data Classification
Using Discrete-Time K-Winners-Take-All Neural Circuits
Pavlo V. Tymoshchuk, Sergiy V. Shatnyi, Mykhaylo V. Lobur, Orest Y. Tsurkovs’kyi
Department of Computer Aided Design Systems, L’viv Polytechnic National University,
12, S. Bandera Str., L’viv, 79013, Ukraine {pautym@polynet.lviv.ua}
The project statement
The design of modified mathematical model and corresponding functional block-diagram of
self-optimizing neural network (SONN) is proposed. The network outputs are obtained by using
the discrete-time dynamic K-winners-take-all (KWTA) neural circuits which are capable to
identify the K largest from N input features, where 1 K N is a positive integer in the case
K=1. Implementation prospects of the SONN in an up-to-date digital hardware and its
application for classification problem solving of dynamic features are outlined. In contrast to
other comparable analogs, the network is expected to combine such properties as high speed and
precision of data processing.
1. Background
Artificial neural networks are important for neural computation. They possess an ability to
reduce own topology in the process of classification problem solving. Furthermore, such the
networks produce a multilayer hybrid topologies, which together with the weights, are
determined automatically by the constructing algorithm and thus avoid the search for finding a
proper neural architecture. Another advantage of these algorithms is that convergence is
guaranteed by the method [1] - [5]. A growing amount of current research in the area of neural
networks is oriented towards this important topic. Providing constructive methods for building
hybrid neural networks can potentially create more compact models which may be easily
implemented in hardware and used on various embedded systems.
The SONN is a neural network classifier based on a training data analysis which quickly
estimates values of individual real, integer or binary input features. The method carries out all
computation fully automatically from a data analysis and a data input dimension reduction to a
computation of a neural network topology and its weight parameters. The SONN computational
cost is equal O(nlog2n), where n is a sum of a data quantity, a data input dimension and a data
output dimension. The SONN is capable both to develop fully automatically a network
architecture, suitably compute weights and automatically convert any integer and real data into
discriminative binary vectors, optimize them and an input data dimension as well. The automatic
factorization of real input vectors provides small and good optimized SONN topologies [6], [7].
The process of the SONN design starts from a training data analysis. First, the SONN
examines all input features (inputs) of all training samples for all classes, then automatically
factorizes integer and real inputs into binary bipolar vectors. Next, it counts and estimates all
factorized input features and starts the process of a neural network hybrid architecture
development and a weights computation. The SONN integrates and compresses same data
features of training samples as much as possible by grouping them together and by transforming
features of same discrimination coefficient values into single connections. This process is
associated with the process of training samples divisions into subgroups that are used to create
neurons.
The SONN topology consist of the following three types of neurons that fulfills an input
data transformation from real input vectors into a final classified outputs: discriminativelyfactorization neurons; aggregation-strengthening neurons; maximum-selection neurons. The
neurons are arranged in some number of layers. The number of layers is dependent on training
data correlations. If training data of different classes are more correlated then a neural network
architecture is also more complicated and it has got more layers and neurons and vice versa. If
1
there are little correlations between same class training samples there are more neurons in layers
and vice versa. The SONN outputs determine the similarities of a given input vector to classes
defined in a training data set. The SONN qualifies some groups of inputs to be more important
and pays special attention to them. On the other hand, inputs which are less or by no means
important for a classification are simply reduced and not used in a classification process. The
SONN can automatically minimize a real data input dimension and a factorized binary data
dimension, so this solution is free from “the curse of dimensionality problem”.
The part of a data transformation is proceeded by aggregation-strengthening neurons
placed in the middle part of the SONN architecture. These neurons demand bipolar binary inputs
during their adaptation process. They aggregate inputs of same discrimination coefficient values
together (without an information lost) and appropriately strengthen these of them that better
discriminate training samples in-between various classes. The strengthening factors are called
global discrimination coefficients. The aggregation-strengthening neurons produce their outputs
in the range of [-1;+1]. The neurons are interconnected in such a way to promote the most
discriminative features and to propagate discrimination properties of previous connections to
next layers (i.e. it propagates the sum of discrimination coefficients of all previous connections
of a considered neuron). The outputs of aggregation-strengthening neurons are given by:
The bipolar binary inputs necessary for an ASNs adaptation are computed by discriminativelyfactorization neurons (DFNs) that are capable of automatically factorize integer and real training
inputs in such a way that existing discriminative properties are not lost after this transformation.
If simultaneously all associated inputs lie in appropriate factorization ranges of a considered
DFN then it produces the value +1 on its output and the value −1 otherwise using the following
function:
The maximum similarity to each class is computed by maximum-selection neurons (MSNs)
which are used to select a maximal value from all connected ASNs that represent aggregated
most important input features of training samples of appropriate same classes by the following
expression:
2
The SONNs require all data available at the beginning of the adaptation process, so they can
process various global optimization processes. As a result, the SONNs can globally estimate
importance of each input feature for all training samples and adapt the network structure and
weights reflecting these estimations. The importance of each k-th input feature for each n-th
training sample of the m-th class is globally measured by determining the following global
discrimination coefficients:
where M denotes a number of trained classes, Q is a number of all training samples, K is a
n
number of factorized input features, u k is the k-th feature value for the n-th training sample and
Pkm , N mk , Q m are defined by the following formulas:
Those discrimination coefficients qualify the discrimination property of each k-th feature
for the n-th training sample of the m-th class and have the following properties: they are
insensitive for a different quantity of training samples that represent various classes; a
discrimination property of each feature of each training sample is globally estimated. The SONN
topology optimization process is so designed to compute a minimal network structure using only
those features that have maximal discrimination properties for each class.
The above described three types of neurons are used to develop a hybrid partially connected
multilayer neural network topology that can be precisely adjusted to an almost whatever training
data set and a classification task. The SONN topology optimization process is based on
discrimination coefficients computed for all training data samples as well as for some subgroups
of them. In order to find an optimal SONN topology there is necessary to create only these
connections which are necessary to classify correctly and unambiguously all training data using
only the input features with maximal discrimination properties. Weights parameters and a
topology are computed simultaneously during the SONN construction process. Such strategy
makes possible to precisely assign each feature representing a subgroup of training samples to an
accurate optimal weight value arising from its discrimination properties. The SONN
classification results have been compared with the other AI methods for the Wine and Iris data
from MLRepository. The comparison results show that an error of correct classification by
SONN approach is close to that of FSM method and method of k-nearest-neighbors. The whole
process of the neural networks development and optimization and the weights computation for
classification by using SONN for 5 inputs takes 1 - 2 seconds [6], [7]. The SONN has been
3
successfully implemented on digital computers and adapted to many classification and
recognition tasks, in particular, to OCR, medical and pharmacological diagnosing, and classical
benchmarks.
2. Objectives
The aim of this project is to design a mathematical model and corresponding functional
block-diagram of discrete-time SONN for classification problem solving of dynamic features.
Outputs of such a network be obtained based on discrete-time dynamical K-winners-take-all
(KWTA) neural circuits. Prospects of implementation of the network in an up-to-date digital
hardware should be outlined. Computer simulations confirming theoretical results have to be
provided. It has be shown that the designed SONN is more fast and computationally precise than
other comparable competitors.
3. Design the SONN for dynamic input features
3.1. K-winners-take-all neural circuit
In order to increase the SONN performance that is outlined in Subsection 3.3, the SONN can
be designed in an up-to-date hardware. In this case a MSN of the SONN modeled by (6) is
effectively constructed by using KWTA neural circuit. KWTA neural networks are known to
select K largest out of a set of N inputs, where 1 K N is a positive integer [8] - [12]. In the
special case when K is equal to unity, which has to be used for classification problem solving,
the KWTA network is the winner-takes-all (WTA) one, that chooses the maximal among N
inputs [13] - [15]. In the project, outputs (6) is proposed to calculate by using discrete-time
dynamic KWTA neural circuit presented in [9]. It is known that discrete-time neural networks
comparatively to continuous-time analogs demonstrate a more high precision of signal
processing, they are more reliable, more suitable to implement in software, and can be
implemented in an up-to-date digital hardware for real time data processing [15]. The circuit is
globally stable and convergent to KWTA operation in finite number of iterations. It is composed
of N feedforward neurons and one feedback hardlimiting neuron used to determine the desired
shift of inputs. The circuit can be implemented in a digital hardware by summers, integrator,
switches and external sources of voltage or current, which are appropriate for real time data
processing using VLSI technologies [16]. In contrast to other comparative analogs, the circuit
can process correctly any finite value distinct inputs of any finite range, it has low computational
and hardware implementation complexity, high speed of processing inputs, and possesses order
preserving property of inputs. The circuit does not require resetting and corresponding
supervisory circuit that additionally simplifies the hardware and increases a speed of processing
inputs. Let us use the circuit mathematical model in the case K=1 and simplify it to the discretetime state equation
k
s
(
k
1
)
s
(
k
)
A
sgn
R
s
(
k
)
(11)
and output equation
bn cn s(k),
(12)
1
, ifR
(
s
(
k
))
0
;
T
(
b
,b
,...,
b
)
sgn
R
(
s
(
k
))
0
, ifR
(
s
(
k
))
0
;is a signum (hard limiting)
n
n
n
n
where b
1
2
N ,
1
, ifR
(
s
(
k
))
0
N
s
(
k
)
1
S
b
(
k
), is a k-th discrete value of the residual function,
n
function, R
j
j
1
4
N
1
, ifb
(
k
)
s
(
k
)
0
;
n
j
Sbnj (k) determines
S
b
(
k
)
is a step function, a sum
n
j
0
,otherwise j1
the number of positive outputs, s(k ) is a k-th discrete value of scalar dynamic shift of inputs,
cnj anj amin
c
c
c
0
n
n
n
are
preprocessed
inputs,
,
1
2
N
a
a
a
0
n
n
n
are inputs that assumed to be located in the known range [amin,amax] ,
1
2
N
where the numbers a min and a max represent the minimal and maximal possible values of inputs,
respectively with amaxaminA, 1 N is a number of inputs, is an iteratively updated
parameter that guarantees a convergence of the algorithm to the KWTA operation, 0s(1) A
is an initial condition.
The outputs (6) can be obtained by using the step function
u
, if S
b
(
k
)
0
;
n
n
j
j
x
(
k
)
(13)
n
j
0
otherwise
and sum
N
y
(k
)
x
k
),
m
nj(
j
1
(14)
where u n j is a value of n j th input, y m (k ) is a k-th discrete value of maximal input.
3.2. A functional block-diagram of the SONN
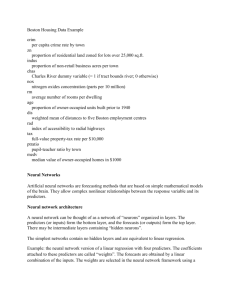
A functional block-diagram of the SONN can be composed of three parts, specifically
aggregation-strengthening neurons, discriminatively-factorization neurons, and maximumselection neurons. In particular, a functional block-diagram of the aggregation-strengthening
neurons described by expression (1) is presented in Fig. 1. The diagram consists of the following
blocks: input data u training/test; classes C; norm function (8); summing in (9) and (10);
controlled switches S that implements fulfilling conditions in (7) and comparison in (9), (10);
multiplication, division and summing : in (7); multiplication and division : in (3) and (4);
multiplication and summation in (1). The aggregation-strengthening neurons are
implemented in a digital hardware using summers, multipliers, dividers and controlled switches.
Fig. 1. Architecture of the aggregation-strengthening neurons described by expression (1).
5
A functional block-diagram of the discriminatively-factorization neurons described by
expression (5) is presented in Fig.2. The diagram consists of digital comparators, AND- and NOswitches, and constant voltage or current sources.
Fig. 2. Architecture of the discriminatively-factorization neurons of the SONN described by (5).
A functional block-diagram of the maximum-selection neurons described by (13), (14) built
based on the discrete-time dynamic KWTA NC presented in [9] is shown in Fig. 3, where ∑ is a
block of discrete-time summation, S is a switch described by a step function (13). Thus, the
circuit can be implemented in a digital hardware using such digital components as summers,
controlled switches, integrator, and external sources of voltage or current.
Fig. 3. Architecture of the maximum-selection neurons based on KWTA neural circuit presented
in [9] which solve the problems (13), (14).
As one can see from (14), the output of the SONN has to be computed for each class
m(1,...,
M
). Therefore, in order to reduce a time of obtaining outputs (14), parallel
6
computation of each output (14) can be applied. For this purpose M discrete-time dynamic
KWTA neural circuits is proposed to use in the project.
The overall SONN can be implemented in an up-to-date digital hardware using such
electronic circuit components as summers, multipliers, dividers, controlled switches,
comparators, AND- and NO-switches, integrator, and external sources of voltage or current.
Note that the functional block-diagrams presented in Fig. 1 – Fig. 3 are characterized by
hardware implementation restrictions. In particular, all the implemented blocks of the blockdiagram will have time delays which in totality define the speed of processing inputs by a
corresponding real digital SONN. An expression for time delay to process one set of input
features by the network can be presented as follows:
TT
T
T
1
2
3,
(13)
where T1 is a time delay of the discriminatively-factorization neurons, T2 is a time delay of the
discriminatively-factorization neurons, T3 is a time delay of the maximum-selection neurons.
If more than one set of input features should be processed, then it can be done sequentially in
time. In other words, each next set of inputs can be processed after processing the previous set of
inputs. Therefore, in order to obtain a correct operation of the SONN in the case of more than
one set of inputs, a repetition period Tr of sets of input features should meet the following
inequality:
Tr T .
(14)
The SONN can be used in the case of time-varying input features c l (k ) , l=1,2,…,N,
k=1,2,… if the module of speed change of such input features is much less than that of
performing the mathematical operations which are present in the SONN model. In other words,
in this case, condition
dx
k
)/dt
dp
dt
l(
n/
, l=1,2,…,Q,
(15)
where Q is a quantity of mathematical operations fulfilled in the network, should be satisfied for
each k .
The resolution of the SONN is theoretically infinite and does not depend of values of its
parameters. In other words, the network can always classify distinct input features correctly.
Moreover, the SONN can operate correctly with any initial value of a state variable
0x(1) A, where A>0 [8]. Therefore, a functioning of the designed SONN is independent on
initial conditions which can accept arbitrary values in a given range. Therefore the network will
not require periodical resetting for repetitive processing of input features, additional supervisory
circuits for resetting, and spend additional processing time on this operation. This allows to
simplify the hardware and increase a speed of processing input features that is important for real
time operating of the designed SONN.
3.3. Implementation prospects of the SONN
In section 1 static (i.e. time independent) learning set for designing SONN was used.
According to [7], the error of classification problem solving of static input features by SONNs
for some test Wine data is larger than 6% against its less than 1.5% value for FSM method.
Moreover, the error of classification by SONNs for some test Iris data is higher than 5% in
contrast to 4% value obtained using the method of k-nearest neighbors. Therefore, we propose to
solve a problem of precision rising of classification by SONNs in this project. For this purpose,
7
we suggest to obtain a solution of the problem using SONNs with higher order nonlinearities
comparatively to existing ones.
Let us consider the case of generalization and applying SONN for classification of discretetime dynamic input features. In this case, for every time point t(k), k = 1,2,…K different SONN
structure can be created. In each time point t(k) corresponding SONN is created and optimized,
and values of its weights are computed for classification problem solving. The process of
designing the SONNs for K time points of input features will require a time T=K , where is a
time of creating, optimization and the SONN weights computing in one discrete-time point of
input feature. Thus, a time of designing K SONNs for K time points of input features by
sequential computer software can have unreasonable large value for large number of K.
Moreover, in this case in order to keep designed structure and parameters of SONNs for each
time point k in computer it is necessary to have large volume of memory. For instance, according
to numerical results presented in [7] for concrete example of classification with 5 input features
„The whole process of the SONN development, optimization and weights computation have
taken 1 - 2 seconds”. Therefore, in this case for K=10000 the time T=10000 - 20000 seconds>2.5
– 5 hours which can be unexeptable from practical point of view. Furthermore, in order to solve
a classification problem of dynamic inputs by SONNs in a real time, i. e. in online mode the
inequality <= t(k1)t(k), k=1,2,...,K-1 should be satisfied. For instance, to classify signals
of EEGs given in [17], [18] in online mode it is necessary to have <=78 ms that is much less
than SONNs presented in [7] can provide. Therefore, the problem of reducing a time of problem
solving is important both for offline and online classification.
An implementation of the designed SONN will be simulated using software. Such
simulations should confirm theoretical results obtained in the project. It is known that software
implementations of neural networks offer flexibility. Software implementations of SONNs can
be trained and simulated on general-purpose sequential computers. In this project for reducing a
time of classification we propose to solve the problem of classification of dynamic input features
by implementation of SONN in a parallel software using their parallel structure.
The processing speed of input features by SONNs implemented in software can be not high
enough in many applications, especially to meet the demands of real time. Therefore,
microprocessors and digital signal processing can be not suitable for parallel designs of SONNs,
in particular, for real time applications. In order to speed-up the SONN operation, let us
implement it in an up-to-date digital hardware to be used in such applications. Comparing with
an analogue implementation, as known, a digital hardware is more computationally precise and
reliable as long as the requirements for the size and power efficiency are not high. The digital
implementation of the designed SONNS is expected to have a better repeatability, lower noise
sensitivity, better testability, higher flexibility, as well as compatibility with other types of
preprocessors [16]. Despite the tremendous growth in the digital computing power of generalpurpose processors neural network hardware has been found to be promising in many
applications, such as image processing, speech synthesis and analysis, pattern recognition, high
energy physics and others. Hardware implementations are essential for applicability and for
taking the advantage of SONN’s inherent parallelism. Specific-purpose fixed hardware
implementations (i.e. VLSI) can be dedicated to specific SONN models. VLSI implementations
of SONNs is capable to provide not only high speed in real time applications but also
compactness [19]. Therefore SONNs implemented in hardware comparatively to its software
implemented counterparts will offer the following advantages [20]:
- Speed: Specialized hardware offers very high computational power at limited price and
thus achieving several orders of speed-up, especially in the neural domain where
parallelism and distributed computing are inherently involved; for example, VLSI
implementations for cellular neural networks can achieve speeds upto several teraflops
[21], which otherwise is a very high speed for conventional DSPs, PCs, or even work
stations.
8
-
Cost: A hardware implementation can provide margins for reducing system cost by
lowering the total component count and decreasing power requirements.
- Graceful degradation: Even with the advancement and introduction of the multi-core PC
processors architectures, the need for having effective fault-tolerant mechanisms is still
present. Importance and in this respect parallel hardware implementations offer
considerable advantage.
- Compactness. Recent advances in reprogrammable logic enable implementing large
ANNs on a single device. The main reason for this is the miniaturization of component
manufacturing technology, where the data density of electronic components doubles
every 18 months.
Therefore, to solve the problem of classification of dynamic input featuress we propose to
implement the SONNs in an up-to-date digital hardware. For SONN hardware FPGA-based
implementations, ASIC-based implementations, and DSP-based implementations can be used.
Since DSP-based implementation is sequential, it does not preserve the parallel architecture of
the SONNs. ASIC implementation can be used for the SONN hardware realization, although it
does not offer re-configurability by the user in order to improve their performance. The FPGA
implementation achieves a comparable accuracy with the traditional solutions based on generalpurpose computers. An FPGA as an implementation hardware combines the reprogrammability
advantage of general purpose processors with the parallel processing and speed advantages of
customer hardware. The size and speed evaluation of FPGA reveals its low cost in terms of logic
and memory [22]. To implement the SONN in a hardware, the FPGA based reconfigurable
computing architecture is quite suitable because the parallel structure of FPGA matches the
topology of the SONN and offers flexibility in reconfiguration. The architecture of the SONN
and training algorithms can be implemented on a FPGA chip performing an on-line training.
Such computational characteristics of the SONN as modularity and dynamic adaptation can also
be realized in FPGA hardware. Using FPGA, the network may be implemented through parallel
computing in a real-time hand-tracking system [23]. Due to the relatively high capacity, high
density, short design cycle, and short time to market when using EDA tools, FPGA can be
considered as the most applicable microelectronic technology for the designing SONN.
References
[1] Duch, W., Korbicz, J., Rutkowski, L., Tadeusiewicz, R. (eds.): Biocybernetics and
Biomedical Engineering. EXIT, Warszawa (2000).
[2] Fiesler, E., Beale, R. (eds.): Handbook of Neural Computation. IOP Publishing Ltd.,/
Oxford University Press, Bristol, New York (1997)
[3] Horzyk, A.: A New Extension of Self-Optimizing Neural Networks for Topology
Optimization. In: Duch, W., Kacprzyk, J., Oja, E., Zadrożny, S. (eds.) ICANN 2005. LNCS, vol.
3696, pp. 415–420. Springer, Heidelberg (2005)
[4] Horzyk, A., Tadeusiewicz, R.: Self-Optimizing Neural Networks. In: Yin, F.-L., Wang,
J., Guo, C. (eds.) ISNN 2004. LNCS, vol. 3173, pp. 150–155. Springer, Heidelberg (2004).
[5] Jankowski, N.: Ontogenic neural networks. EXIT, Warszawa (2003).
[6] Adrian Horzyk, Self Optimizing Neural Networks SONN-3 for Classification Tasks,
Proc. of HAIS 2008, LNAI 5271, eds. E. Corchado, A. Abraham, W. Pedrycz, Springer-Verlag,
Berlin Heidelberg 2008, pp. 229-236.
[7] Adrian Horzyk, Introduction to Constructive and Optimization Aspects of SONN-3, Proc.
of ICANN 2008, LNCS 5164, eds. V. Kurkova et al., Springer-Verlag, Berlin Heidelberg 2008,
pp. 763-772.
[8] E. Majani, R. Erlanson, and Y. Abu-Mostafa, “On the k-winners-take-all network,” In
Advances in Neural Information Processing Systems, vol. 1, D. S. Touretzky, Ed. San Mateo,
CA: Morgan Kaufmann, 1989, pp. 634–642.
[9] P.V.Tymoshchuk, “A discrete-time dynamic K-winners-take-all neural circuit”,
Neurocomputing, vol. 72, 2009, pp. 3191-3202.
9
[10] P. Tymoshchuk, “Continuous-Time Model of Analogue K-Winners-Take-All Neural
Circuit”, in Proc. 13th Int. Conf. EANN, CCIS 311, London, 2012, pp. 94–103.
[11] P. V. Tymoshchuk, “A model of analogue K-winners-take-all neural circuit,” Neural
Networks, vol. 42, pp. 44-61, June 2013.
[12] P. V. Tymoshchuk ”A fast analogue K-winners-take-all neural circuit”, in Proc. Int.
Joint Conf. Neural Networks, Dallas, TX, 2013, pp. 882-889.
[13] R. P. Lippmann, “An introduction to computing with neural nets,” IEEE Acoustics,
Speech and Signal Processing Magazine, vol. 3, no. 4, pp. 4-22, Apr. 1987.
[14] P.Tymoshchuk and E.Kaszkurewicz, ”A Winner-take-all circuit based on second order
Hopfield neural networks as building blocks”, in Proc. Int. Joint Conf. Neural Networks, vol. II,
Portland, OR, 2003, pp. 891-896.
[15] P.Tymoshchuk and E.Kaszkurewicz, ”A winner-take all circuit using neural
networks as building blocks”, Neurocomputing, vol. 64, 2005, pp. 375-396.
[16] A. Cichocki and R. Unbehauen, Neural Networks for Optimization and Signal
Processing (New York: John Wiley and Sons, 1993).
[17] S. M. Lee and S. J. Roberts, “Sequential Dynamic Classification Using Latent Variable
Models”, Technical Report PARG 08-02, Robotics Research Group of Engineering Science
Department of Oxford University, 2008.
[18] J. W. Yoon,_S. J. Roberts, M. Dyson, J. Q. Ganb, “Adaptive classification for Brain
Computer Interface systems using Sequential Monte Carlo sampling,” Neural Networks, vol. 22,
pp. 1286-1294, June 2009.
[19] Suhap Sahin, Yasar Becerikli, and Suleyman Yazici, Neural Network Implementation in
Hardware Using FPGA, Proc. of ICONIP 2006, LNCS 4234, eds. I. King et al., Springer-Verlag,
Berlin Heidelberg 2006, pp. 1105-1112.
[20] J. Misra and I. Saha, ”Artificial neural networks in hardware: A survey of two decades
of progress”, Neurocomputing, vol. 74, 2010, pp. 239-255.
[21] M. Hanggi, G. Moschytz, Cellular Neural Networks: Analysis, Design, and
Optimization, Kluwer Academic Publishers, Norwell, MA, USA, 2000.
[22] A. Muthuramalingam, S. Himavathi and E. Srinivasan, “Neural network implementation
using FPGA: issues and application”, International Journal of Information Technology, vol. 4,
no 2, 2008, pp. 95-101.
[23] M. Krips, T. Lammert and A. Kummert, “FPGA implementation of a neural network
for a real-time hand tracking system”, Proceedings of the 1st IEEE International Workshop on
Electronic Design, Test and Applications, vol. 29-31, 2002, pp. 313-317.
10