2. Primitives of Geographic Representation
advertisement

Towards a General Theory of Geographic Representation in GIS
May Yuan, Michael F. Goodchild, Thomas J. Cova
Abstract
We outline a general theory of geographic representation in GIS based on points as the
fundamental geographic information primitive. Points are combined to build a geographic
quartet of geo-objects field objects (f-objects), object fields (o-fields), and geo-fields through
aggregation over space, time, or geo-semantics (meaningful information associated with a
geographic location). Aggregation is the sole operation used to construct GIS representations of
geographic reality and to incorporate interactions among any combination of geo-objects by
organizing them into geo-pairs, geo-clusters, geo-hierarchies, and geo-networks. The general
theory captures geographic dynamics through interactions among geo-objects, field objects,
object fields, and geo-fields in these organizational frameworks of geo-pairs, geo-clusters, geohierarchies, and geo-networks. We envision that the general theory of geographic representation
will provide a unified framework to GIS data modeling and broaden the dichotomy of objectand field-views of geography. The paper introduces the preliminary framework of the theory and
defines the geographic quartet and the four organizations of interactions with examples.
Keywords: geographic representation, space and time, objects and fields, GIS data modeling.
1.
Introduction
While the development of geographic data modeling techniques in geographic information
systems (GIS) has thrived in the last five years, the development is largely driven by technology
without a solid theoretical foundation. In this paper, we attempt to establish a foundation for a
general theory of geographic representation to capture geographic dynamics in GIS data models.
Recognizing that extensive GIScience research has addressed conceptual and theoretical issues
on geographical space and time (Peuquet 2002), we contend a need for a general theory of
geographic representation to underpin the diverse views of space-time integration and to bridge
the gap between abstract concepts that address the essence of space and time and practical
applications that call for concrete methods to handle spatiotemporal data. The discussions of
field ontology that occurred in the 1990s (Couclelis 1992; Goodchild 1992) and in the Project
Varenius specialist meeting on the Ontology of Fields (Peuquet et al. 1998) largely ignored the
issue of time. Other developments, such as metamaps (Takeyama and Couclelis 1997) and object
fields (Cova and Goodchild 2002), also need to be brought within a single unifying framework.
A theoretical foundation of rigorous and robust representation is needed to fully support
visualization and computation of spatiotemporal information that characterizes both happening
and becoming of geographic worlds. In the next section, we inquire into the most fundamental
elements of geography and propose a framework as the first step towards a general theory of
geographic representation. Following the proposed framework is a discussion on how the
proposed framework entails a general theory. Finally, we conclude the paper with a discussion of
the novelty that our proposed framework brings to geographic representation and GIS data
modeling.
2.
Primitives of Geographic Representation
We begin with three elements: space, time, and geo-semantics. Geo-semantics ( ) is used here
for “geographic information meaningful to the user” to stress the selective and situational nature
of geographies. What is at a geographic location depends upon the purpose, measurement, and
interpretation of an observer. For example, for a given area, agricultural scientists are likely to
identify soil types and soil properties that are distinctly different from the types and properties of
soils that may be relevant to civil engineers, and while botanists see trees, ecologists may see
forests. For space, we use a location vector (S) to address spatial dimension and geometry.
Location may be referenced by absolute coordinates of x, y, and z, or positions relative to other
geographic things of interest in the form, for example, of eastings, northings, and relative
elevations. Similarly, we use a time vector (T) to indicate time of interest in multiple
dimensions, that may include the time of happening (th), the time of observation (to), the time of
recording (tr), and periodic time (tp) in the case of cyclic phenomena.
2.1 Geo-atoms i {S i , Ti , i }
All geographic information can be decomposed into point sets or geo-atoms. An individual (i)
geo-atom ( i ) consists of geo-semantics ( i ) measured, observed, or inferred at a point
location ( S i ) and a given time (Ti ) . Points are used here to refer to a location within which a
piece of geographic information can be associated; hence, cells are a specific type of point. We
consider this atomic form (i.e. geo-atoms) of geo-semantics at a location at a given time the most
primitive unit of geographic information; all other types of geographic information consist of
aggregations of the atomic form, often over infinite point sets. Our premise is that points are the
most primitive spatiotemporal element with which information can be associated to space and
time. Higher-dimensional properties of lines, areas, and volumes are aggregates of point sets by
thresholding geo-semantics or assuming uniform geo-semantics in the aggregation. For example,
property lots are aggregates of point sets that have the same ownership, contours are aggregates
of point sets based on elevation criteria, and the State of Hawaii is an aggregation of a point set
under the administrative authority of the State of Hawaii. Direct measurements of lines (e.g.
distance or length) are not considered as geo-semantics at individual locations but are
relationships (in the case of distance) between location points or secondary properties (in the
case of length) by identifying all linearly aligned location points that satisfy a given geosemantic threshold.
2.2 Geo-objects {ID, S , T , ST } aggregate ( S , T )
Geo-objects are what we identify as individuals in geography that cannot be further divided into
individuals of the same kind. We consider that a geo-object is a uniquely identified (indicated by
ID) location point set (S) and time set (T) in which geo-semantics meet certain
requirements; S , T , ST indicates a qualified set of geo-semantics ST over space S and time T
of interest. Notation (S) differs from notation (Si) in that S denotes a point set whereas Si marks
an individual point. The same convention is applied to other notations throughout the paper.
Under the consideration that geo-atoms are the most primitive units of geographic information, a
2
geo-object is a function that aggregates geo-atoms () within space (S) and time (T) of interest.
Locations of the point set may be represented by Cartesian coordinates, relative coordinates, or
mathematical expressions (e.g., circles, arcs of ellipses, and Bézier curves) and may include
disjoint subsets for geo-objects that consist of multiple parts (e.g., multipoints, multipart
polylines, multipart polygons as recognized in the OGC Simple Feature Specification,
www.opengeospatial.org).
Each geo-object must have a unique identifier (ID) to distinguish itself from the others.
In some cases, the spatial location and extent of a geo-object are defined before geo-semantics
are measured. Examples are census enumeration zones and lakes. Most current GIS data models
take a space-centered approach that recognizes geographic objects by location and ascribes
geometry to these objects. In doing so, new object identities are needed when changes occur to
location or the geometry of an existing object. Alternatively, the formation of census
enumeration zones can be considered as an outcome of a spatial aggregation based on geosemantics which have been measured previously (e.g., previous census) or are easily
distinguished without measurements (e.g., locations of water or not water). From this
perspective, a geo-object identity is not determined by location or geometry, but by its intrinsic
properties that make it a geo-object of its kind as judged by geo-semantic requirements.
“Portage” for example, was used as the county name for two spatially disjoint areas in Wisconsin
at different times. When state-county names are used as county identifiers, the identity of Portage
county is not tied to a particular geographic location.
In addition to properties assumed uniform over the object (spatially intensive properties),
properties at the set level are likely to emerge and may include measures of the point set (e.g.,
length, area) and integrals of spatially intensive properties. These set measures and integrals are
spatially extensive properties which are closely dependent on and cannot be separated from line
or area objects. The contrast between spatially intensive and extensive variables is described in
(Longley et al. 2001). For example, population counts are a function of the area of the reporting
zone. When a county is subdivided into two smaller units, the population density (a spatially
intensive property) in its subdivisions may remain the same as the county population density, but
population counts (a spatially extensive property) are likely to be different (unless one of the
subdivisions has no population). Furthermore, many geo-objects have properties that are
transitional in space. Their identities cannot be determined through aggregation of the geo-atoms
that result from simply geo-semantic thresholding. Such a geo-object is characterized by its
indeterminate boundaries and will be conceptualized here as a fuzzy point set (Burough and
Frank 1996).
When time is a consideration, the identities of geo-objects are critical to track through
changes in location, geometry, and properties (Hornsby and Egenhofer 2000). Since a geo-object
is an aggregate of geo-atoms under a set of geo-semantic criteria, its identity is determined by the
defined geo-semantic criteria and spatial and temporal constraints to the aggregation. The
defined geo-semantic criteria specify the range or discrete values (e.g. domain) within which
geo-semantics can be considered as the properties of a geo-object. Only when a geo-atom has
geo-semantic values at S i , Ti are within the domain, the geo-atom is part of the geo-object.
When geo-semantic values meet the geo-semantic criteria at S i , Ti but not at S i , Ti 1 , the geoobject ceases to exist at S i either by moving out of the location, dissipating entirely, or
transforming into another geo-object with a different identity.
3
Once the identity of a geo-object is determined, its spatiotemporal path and behavior can
be represented and tracked by lifelines (Mark and Egenhofer 1998); and its spatiotemporal
domain of accessibility can be represented by space-time prisms (Miller 1991). For geo-objects
with geometry of higher dimensions (e.g. lines or polygons) or with multiple parts, space-time
volumes are necessary to represent their spatiotemporal extent as elaborated in the SPAN
ontology (Grenon and Smith 2004). While observations of a lifeline or spatiotemporal geo-object
are discrete, various interpolation methods (e.g. linear or curvilinear) may be applied to estimate
intermediate locations and geometry between temporal observations (Pfoser and Jensen 2001;
Stroud et al. 2001; Pfoser et al. 2003). In addition to trajectories, additional parameters are
necessary to record geo-objects which may change geometry over time. An example is the helix
representation that uses a spline to track the location of a geo-object’s centroid and prongs to
record the extension of the geo-object in different directions at each point in time (Agouris and
Stefanidis 2003).
Aggregation of geo-atoms to form a geo-object is subject to spatial and temporal
constraints by the nature of the geo-object, and such spatiotemporal constraints can be used to
select appropriate interpolation methods as discussed above. A geo-object only exists in certain
spatial and temporal extents bound by biological, physical, or administrative processes through
which geographic entities are formed. At the highest level, no geo-objects on Earth can have a
spatial extent greater than the surface of the Earth. Under constraints of physical processes, the
largest hurricane recorded (Typhoon Tip) extended out to 1,100 km, and the smallest (Cyclone
Tracy) was about 50km in radius. In addition, geo-objects have life expectancy; some may be
ephemeral (e.g., rainstorms), but others can be long-lasting (e.g. mountains). Some geo-objects
must be conterminous in space and time (e.g., a reservoir or a pollution plume), but others may
have spatially or temporally disjoint parts (e.g., a wildfire or a country).
In summary, geo-objects are formed by aggregating geo-atoms under spatial, temporal,
and geo-semantic constraints. Identities of geo-objects are recognized by spatial and temporal
extents in meeting certain geo-semantic requirements. Changes to a geo-object over time can be
tracked based on identities. Some geo-objects may have spatially or temporally disjoint parts.
These geo-objects consist of discrete point sets S , T , ST , but these discrete point sets are
united by a common geo-object identity. On the one hand, geo-objects are ‘discovered” by
spatiotemporal aggregation of locations with qualified geo-semantics; in other words, geosemantics are measured prior to the identification of geo-objects. On the other hand, geo-objects
may be recognized by distinct geo-semantic discontinuity which enforces the perception of
boundaries, and consequently the extents over which spatial and temporal aggregation takes
place. In such cases, geo-semantics are characterized after the identification of geo-objects.
2.3 Geo-fields: f (S , T ) aggregate ( )
A geo-field is a continuous field characterizing the variation of a single spatial variable ( ) of
the geo-semantics ( ) over space (S ) . Similar to geo-objects, a geo-field can be also be
considered as an aggregate function of geo-atoms within geo-semantics: aggregate ( ) .When
time (T) is a constant, the field represents the spatial variation of at a given time; whereas,
when time of interest is a period, we have a space-time field that represents how the state of a
spatial property transitions over time. Multivariate fields, such as vector fields, are considered as
4
geo-semantic aggregates of univariate fields. As such, multiple spatial variables (recorded as a
vector array) are measured at individual predefined locations.
Geo-fields are distinguished from geo-objects in two fundamental ways. First, the
boundary of a geo-field is determined by the interest of an observer over a domain (Peuquet et al.
1998), not by geo-semantic thresholds. Nevertheless, boundaries inside a geo-field may be
determined by thresholding geo-semantics, such as the choropleth maps or the area-class map
(Mark and Csillag 1989). Hence, spatial aggregation that forms a geo-field takes precedence to
the measurement of geo-semantics. In contrast to the identity of a geo-object, locations and their
spatial configurations constitute the unit of observation, measurement, or inference (including
interpolation). Second, geo-fields over space and time represent changes of geo-semantics at
locations in a pre-defined spatial and temporal reference framework. Since all locations are predefined and spatial variables are measured as properties at each location, a geo-field contains no
empty space and allows no movement. While temporal information of a geo-object may refer to
changes to location, geometry, geo-semantics, and identity, temporal information of a geo-field
records geo-semantic histories at individual locations.
In GIS practice, locations and spatial configuration of locations can be defined in various
ways. Below are six common approaches to constructing a digital representation of a 2D geofield (Goodchild 1992):
piecewise constant, such that the variable is constant within each of a set of nonoverlapping, space-exhausting polygons (the choropleth map, and the area-class map in
the nominal case);
piecewise linear in a triangular mesh (the triangulated irregular network or TIN);
piecewise constant in a regular grid (normally rectangular in the two-dimensional case);
sampled at a set of irregularly spaced points;
sampled at a set of points in a regular array (normally rectangular in the two-dimensional
case);
sampled along a set of isolines.
The sampling schemes adopted in the last three cases represent only the measurements of the
focal spatial variable at the sampled points or lines. Spatial interpolation methods are required to
provide estimates of the value of the field away from the sampled points or lines.
The six approaches are clearly not the only possible methods of representing a geo-field.
Finite-element meshes (Topping et al. 2003) cover an area with a mixture of triangles and
quadrilaterals, modeling the variation of a geo-field within each element as a polynomial
function of location, and imposing continuity constraints across element boundaries. The finiteelement meshes define a geo-field in two levels: Likewise, the triangular irregular network (TIN)
model can be extended to represent geo-fields with two levels of aggregates by adopting similar
strategies used in the finite-element meshes to ensure continuity across element boundaries.
Nevertheless, the TIN model is conventionally implemented with a spatial variable (such as
elevation) as a linear function of location within individual elements of triangles (i.e., with
spatially continuous elevations within each triangle); discontinuity of slope occurs across
element boundaries in a TIN unless additional constraints are imposed.
2.4 O-fields: f { f (S , T ), } and F-objects: f { f ( S , T ), S , T }
5
As discussed previously, geo-objects are aggregates of geo-atoms over space and time based on
geo-semantic thresholds; geo-fields are aggregates of geo-atoms on geo-semantics based on
space and time. In other words, for geo-objects, we first identify geo-semantic thresholds and
then form geo-objects by spatiotemporal aggregation of geo-atoms meeting the geo-semantic
requirements. For geo-fields, we first identify the space and time of interest and then aggregate
geo-semantics, one geographic variable at a time. We further adopt the concept of ‘aggregation”
to cut across the conventional views of objects and fields in geographic representation such that
we aggregate objects over a field to form an object field (o-field), and we aggregate fields within
an object to form a field object (f-object).
An o-field maps locations in a field to objects (Cova and Goodchild 2002):
f { f (S , T ), } where the field function: f ( S , T ) maps a geo-object set () to a set of
locations (S) over time (T). Given a point set (S) and time set (T), we can map every location in a
geo-field to a viewshed geo-object. Furthermore, we can map viewsheds at locations over time
to illustrate how line of sights at locations change over time as the morphological landscape
changes, a useful method for archaeological research. What geo-objects are to be associated with
each location in an o-field and how these geo-objects may be influenced by the changes in the ofield is determined by two factors: (1) the interest of the observer or the inquiry of a problem
domain as different observers or problem domains encounter different geo-objects of interest at
locations; (2) the degree to which properties of the field change in the time interval of interest
and functional relationships between the properties and the geo-objects. For example, geoobjects of burns by wildfire at a location are insensitive to changes in elevation at locations over
time; however, geo-objects of viewsheds or drainage paths are closely related to elevation.
Geomorphic erosion and deposition can change viewshed size and drainage patterns at the
impacted location. When these geo-objects have uncertain boundaries, an o-field can map
locations to measures of set memberships that indicate degrees to which a location in the o-field
may be associated with a set of geo-objects.
Likewise, a field object (f-object) emerges when we aggregate geo-fields to form geoobjects. As such, each of the geo-objects inherit properties of geo-fields to represent spatial
variation of the geo-object’s properties (Yuan 1999): f { f ( S , T ), S , T } , where the function f
(S,T) maps a set of locations and time points to spatial variables of geo-semantics, and the
function is applied to different sets of location points (S) over time (T) to form an f-object ( f ) .
Like geo-objects, f-objects may also associates with different sets of locations when changes
occur to locations, geometry, or parts (e.g. movement, dilation, contraction, split. or merge) Fobjects bring an additional dimension of change: changes in internal structure that is
unaccounted for in geo-objects, geo-fields, and o-fields. The spatial variation of geo-semantics
embedded in an f-object can be indicative of physical dynamics that drive the development of the
f-object over space and time. For example, the winds, precipitation, temperature, and pressure
fields of a convective storm characterize the dynamics and stability of the storm and how it may
evolve under certain atmospheric conditions (Yuan 2001). The set of geo-semantics associated
with an f-object is bounded by the spatiotemporal extent of the f-object. As the f-object moves, it
carries the embedded geo-fields with it. The changes of geo-fields inside an f-object signify how
the f-object interacts with the environment and its dynamics, and how the environment may
continue to evolve.
6
Ev R Mo
olv igi vi
ing d ng
Dynamic
Static
Geometry
St
ati
c
M
ov
em
en
t
Dy
na
m
ic
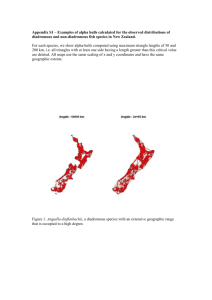
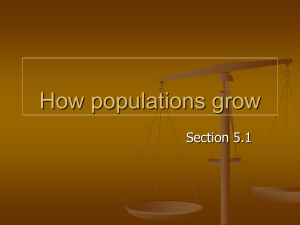
We synthesize the continuum of geoobjects, f-objects, o-fields, and geo-fields in a
cube with three dimensions of potential
Moving
Moving
Elastic
Elastic
changes (static: no change vs. dynamic:
Uniform
Evolving
change over time): Geometry, Movement, and
Internal Structure (Figure 1). The geographic
object-field
continuum
illustrates
the
transitional nature of geo-atom aggregation
Stationary Stationary
according to the degree of constraints imposed
Elastic
Elastic
on spatiotemporal extents and geo-semantic
Uniform
Evolving
thresholding. Judgment of "static" or
"dynamic" depends upon the scale and
Stationary Stationary
Moving
resolution of observations and analysis, and
Rigid
Rigid
Rigid
inherently involves uncertainty. The geometry
Uniform
Evolving
Uniform
of an object may be considered static at one
Static
Dynamic
spatiotemporal scale and resolution, but may
Internal Structure
be dynamic at another. Similarly, scale and
resolution will determine if movement or
internal structure should be considered static
Object-dominance blocks
or dynamic. For example, a forest may be seen
Field-dominance blocks
as static in its internal structure at a national
scale, as a uniform areal feature with attributes
Figure 1: The Cube of Dynamics
(such as the name of the forest, ownership,
primary net production, etc.) applicable to the entire area. However, its internal structure
becomes important when observed at a local scale, such as in an analysis of the ecological
dynamics in the forest, when internal structure is then considered dynamic.
The cube also represents a continuum of objects and fields according to the degree to
which geo-atoms are aggregated in space, time, and geo-semantics. The dimension of Internal
Structure separates object dominance (static internal structure in which all geo-atoms possess
constant values of geo-semantics) from field dominance (evolving internal structure, i.e., with
spatial and temporal variations of geo-semantics). On the object-dominance side, we have geoobjects that do not have variation in their internal structure and are distinguished by their ability
to change geometry or move over time. Likewise, static geometry denotes geo-objects with rigid
shape, while dynamic geometry characterizes elastic geo-objects which may experience shape
change over time.
Below are examples of objects in each of the blocks characterized by object dominance
(static internal structure):
Stationary rigid uniform objects: buildings and streets in a city.
Stationary elastic uniform objects: the seasonal expansion or contraction of a lake when
only the area of the lake is considered.
Moving rigid uniform objects: vehicle tracking and space-time life lines.
Moving elastic uniform objects: a spreading wildfire when only the burn scar is
considered.
7
Alternatively, a geo-field can represent a property of a pre-defined area (e.g. satellite
images) or a geo-object. Conventionally, a geo-field is bounded by a pre-defined quadrilateral
area that is determined by instruments, measurements, or area of interest. When geo-fields are
embedded in a geo-object, the geometry of the geo-object determines the shape and location of
its geo-fields. The geo-object is, therefore, an aggregate of geo-fields in space and time. For
example, a temperature field of the United States is bounded by the U.S. territory. As long as the
U.S. geometry remains the same, the geometry of the temperature field is constant. However, the
geometry of a geo-field will vary as its parent geo-object's shape or location changes. An
example is a geo-field of landuse and landcover (LULC) within a metropolitan area. When the
metropolitan area expands (e.g. urban sprawl), the LULC field changes its size and shape
accordingly. How the embedded geo-fields evolve represents the internal dynamics of the parent
geo-objects; yet how the parent geo-object moves (e.g., rotates, jumps) and develops (e.g., splits,
merges) reflects the meta-structure of its embedded geo-fields. Furthermore, evolution of the
embedded geo-fields and the dynamics of the parent geo-object are inter-dependent: geo-field
evolution can drive changes in geo-object dynamics, and vice versa. Below are examples of
fields in each of the blocks characterized by field dominance (dynamic internal structure):
Stationary rigid evolving field: soils in a watershed and digital elevation models.
Stationary elastic evolving field: temperature of heat-island effects in an urban area, and
vegetation cover during desertification.
Moving rigid evolving field: surface properties of drifting islands.
Moving elastic evolving field: oil spills and hurricanes.
Overall, the cube offers a conceptual basis to build an integrated geo-ontology by
considering different kinds of objects and fields in geography. With the idea that all geo-objects
and geo-fields can be interpreted by various forms of aggregation in space, time, and geosemantics, we obtain a much richer and more simplified GIS framework to represent geography
than the conventional approach that stresses a static object-field dichotomy, entity geometry,
field variables, or time series of features or raster layers. The proposed geographic representation
is richer than the conventional approaches because the degree of aggregation results in a
geographic quartet of objects, f-objects, o-fields, and fields that have been overlooked by
previous GIS data modeling efforts. In addition, the proposed representation simplifies GIS data
modeling by a single concept: aggregation of geo-atoms in space, time, and geo-semantics, to
address the entire object-field quartet while providing a means to investigate dynamics involved
in the quartet. As such, the proposed framework provides a step towards a general theory for
geographic representation for two reasons: (1) It enables a unified view to all geographic in the
object-field quartet; and (2) It allows prediction of potential dynamics involved in geography
through interweaving elements in space, time, and geo-semantics within geo-objects and geofields, and across objects and fields in geography.
3.
Interactions and Aggregation
The ability to represent and predict potential dynamics require understanding both
individuals and groups, as well as interactions at both levels. The cube in Figure 1 depicts eight
types of “geographic things.” Here we use “geographic things” as a general term for things that
can be considered as geo-atoms, geo-objects, f-objects, o-fields, or geo-fields. The idea of
aggregation of space, time, or geo-semantics to form geographic things is extendable to the
8
formation of geographic groups. Interactions among geographic things and groups in space, time,
or geo-semantics are essential to the understanding of geographic processes, and therefore
dynamics because interactions drive certain organizational structures that reflect the dynamics
involved at the group level or between individuals and groups. Interactions over space, in the
form of flows of people and goods or telephone and Internet traffic, for example, are important in
most social and physical processes operating on the geographic landscape. We consider four
types of aggregation to capture geographic interactions: geo-pairs, geo-clusters, geo-hierarchies,
and geo-networks, depending on the linkages among individuals and groups.
Geo-pairs bond two geographic things because some geo-semantics arise, and can only
be meaningfully examined, by looking at pairs. For geo-atoms, a metamap connects pairs of cells
and the properties associated with the pairs (Takeyama and Couclelis 1997). Such geo-pairs can
be obtained from the Cartesian product of a raster with itself, each pair or element of the product
being characterized by a set of attributes. (Goodchild 2000) has generalized this concept to any
pair of geo-objects, using the term object-pair. In the Unified Modeling Language (UML)
attributes of the relationship between two features would be organized as an association class or
relationship class. At the geo-atomic level we might represent this as f (1 , 2 ) to capture
that geo-semantics () result from a function of two geo-atoms (1 , 2 ) .
Geo-clusters form un-connected groups based on distance in space, time, geo-semantics,
or some combination of the three domains. Various spatial, temporal, or spatiotemporal analysis
methods provide the means to acquire clusters based on spatial autocorrelation. Spatialization of
geo-semantics (Skupin and Fabrikant 2003; Randviir et al. 2004) computes distances in attribute
space to investigate similarity. Geo-clusters often offer a basis to formulate hypotheses to
investigate forces which drive geo-clusters or to predict the future development of geo-clusters.
Geo-hierarchies institute a hierarchical structure among geographic things (i.e., geoatoms, geo-objects, f-objects, o-fields, and geo-fields). Imagery pyramids that build multiple
levels of images at different resolutions are examples of geo-field hierarchies. Similarly, geohierarchies can form by aggregates of o-fields. A geo-hierarchy may include any combination of
geo-atoms, geo-objects, f-objects, o-fields, and geo-fields. For example, a geo-hierarchy may
constitute o-fields of elevation and drainage basins, each drainage basin (an f-object) consists of
soil moisture (a geo-field), and each location at the geo-field of soil-moisture has a set of sensors
(geo-objects) used with a kriging method to estimate the soil moisture at that location. Of most
interest in geographic dynamics are hierarchies that result from geographic processes operating
at different spatial and temporal scales. Geo-objects, for example, that result from global
geographic processes can manifest themselves globally (such as areas of extreme temperatures
from greenhouse effects); while those from local processes will be confined at the local scale
(such as damage areas from flash floods). Nevertheless, local processes may be triggered by
global processes, as when global climate change triggers glacier thinning in Alaska (Motyka et
al. 2003). Hierarchies of geographic things form as a result of hierarchies among the processes
that produce these geographic things. Hierarchy theory provides a systematic way to analyze and
understand hierarchical structures of processes operating at different spatial and temporal scales,
as well as geographic things and their behavior in response to hierarchies of processes (Allen and
Starr 1982; Ahl and Allen 1996).
Geo-networks connect geographic things in a network structure such that there are no
determined parent-child relationships as clearly defined in geo-hierarchies. Transportation and
9
utility applications fit well with such network structures. Additionally, groups of geographic
things that exhibit feedback mechanisms likely relate to each other in networks for their cyclic
influence. For example, LULC may trigger regional climate change which in turn pushes policy
changes to enforce LULC compliances to minimize negative impact on climate. From a system’s
perspective, feedbacks are common to most geographic processes, and geographic things, as
products or agents of geographic processes, will likely propagate in a network structure. When a
geo-network consists of some combination of geo-objects, f-objects, o-fields, and geo-fields, the
geo-network can express how driving forces or trigger agents (usually considered as geo-objects
or f-objects) act on the environment (usually considered as o-fields or geo-fields) which,
meanwhile, promotes or suppresses these forces through modification of agent behavior.
Dynamics among geographic things can become apparent in a geo-network. For example, a
network of ozone depletion will link geo-fields of climatic parameters (temperature,
precipitation, etc.), geo-fields of greenhouse gases, o-fields of upwind sources of ozone
precursors at each location, and f-objects of pollution plumes. As to the ozone hole, it can be
considered as an f-object with variation of ozone column inside the hole. However, it can also be
considered as a geo-object to determine the size of the ozone hole in which all locations have
ozone column < 220 Dobson units.
4.
Concluding Remarks
Central to this paper is the emphasis on a unified theory for geographic representation. GIS
researchers have long focused on separate object- or field-based technologies for GIS data
modeling and analysis. While technological advances contribute greatly to GIS software, a weak
theoretical basis hampers real scientific breakthroughs. On the other hand, much conceptual
research reveals intrinsic and singular properties of space and time. Our premise posits a need to
bridge the gap between technological needs for implementation and conceptual understanding of
space and time abstractions. A general theory of geographic representation will serve the purpose
by providing a unified, integrated view of geography, an operational framework for data
modeling, and a means for computation and prediction.
The proposed framework is a step towards to a general theory of geographic
representation. We start with the geographic primitive: geo-atoms, each of which is an
observation, a measurement, or an inferred value at a location taken at a time. Geo-atoms are
represented by an array of space (e.g. location and geometry), time (different kinds of time), and
geo-semantics (geographic observations, measurements, or inferences meaningful to the user).
We adopt one single operation, aggregation, by thresholding space, time, geo-semantics, or
some combination to form a geographic quartet of geo-objects, f-objects, o-fields, and geo-fields.
We understand that o-fields may be better considered as geo-pairs of geo-objects and geo-fields,
and consequently aggregates of geo-atom pairs rather than geo-atoms as for geo-objects, fobjects, and geo-fields. On the other hand, o-fields can still be aggregates of geo-atoms if we
consider that geo-semantics inlcude geo-objects (that is, geo-objects can be meaningful
observations at a location to the user and therefore geo-objects can be properties at locations). In
doing so, we are able to unify object- and field-based views of geography by varying degrees of
aggregation. We synthesize the geographic quartet in a cube of three parameters: shape,
movement, and internal structure and consider if each of the parameters will change over time
(i.e. static vs. dynamic). Finally, we outline four types of interaction (i.e., geo-pairs, geoclusters, geo-hierarchies, and geo-networks) reflecting upon how geographic things can be
10
aggregated into groups. Each type of the interaction aggregates geographic things by some
combination of geographic things across the quartet to capture interactions induced by
geographic processes and therefore dynamics at the group level.
We consider the framework a basis for theoretical developments for representation of
geography because it enables a unified view of geography and allows for structuring and
prediction of geographic dynamics. A comprehensive formalization of the proposed framework
is necessary to develop such a general theory and integrate it into GIS data modeling. In the
meantime, we are building use-cases to prove the concepts presented and to demonstrate their
value.
References
Agouris, P. and A. Stefanidis (2003). " Efficient Summarization of SpatioTemporal Events."
Communications of the ACM 46(1): 65-66.
Ahl, V. and T. F. H. Allen (1996). Hierarchy Theory: A Vision, Vocabulary, and Epistemology.
New York, Columbia University Press.
Allen, T. F. H. and T. B. Starr (1982). Hierarchy: Perspectives for Ecological Complexity.
Chicago and London, The University of Chicago Press.
Burough, P. A. and A. U. Frank, Eds. (1996). Geographic objects with indeterminate
boundaries. GISDATA. London, Taylor & Francis.
Couclelis, H. (1992). People manipulate objects (but cultivate fields): beyond the raster-vector
debate in GIS. Theories and methods of spatio-temporal reasoning in geographic space.
I. C. A. U. Frank and U. Formentini. Berlin, Springer Verlag.
Cova, T. J. and M. F. Goodchild (2002). "Extending geographical representation to include fields
of spatial objects." International Journal of Geographical Information Science 11, no
16(6): 509-532.
Goodchild, M. F. (1992). Geographical data modeling. Computers & geosciences. 18: 401-408.
Goodchild, M. F. (2000). GIS and Transportation: Status and Challenges. GeoInformatica 4, no.
2: 127-139 (13 pages).
Grenon, P. and B. Smith (2004). "Spatial cognitiSNAP and SPAN: Towards Dynamic Spatial
Ontology." Spatial cognition and computation(1): 69-104.
Hornsby, K. and M. Egenhofer (2000). "Identity-based change: a foundation for spatio-temporal
knowledge representation." International Journal of Geographical Information Science
14, no 3: 207-224.
Longley, P. A., et al. (2001). Geographic Information Systems and Science. New York, Wiley.
Mark, D. M. and F. Csillag (1989). " The nature of boundaries on 'area-class' maps."
Cartographica 26: 65-78.
Mark, D. M. and M. J. Egenhofer (1998). Geospatial lifelines. Integrating Spatial and Temporal
Databases. O. Gunther, T. Sellis and B. Theodoulidis. Schloos Dagstuhl, Germany.
Miller, H. (1991). "Modeling accessiblity using space-time prism concepts within a GIS."
International Journal of Geographical Information Systems 5(3): 287-301.
Motyka, R. J., et al. (2003). "Twentieth century thinning of Mendenhall Glacier, Alaska, and its
relationship to climate, lake calving, and glacier run-off." Global and planetary change
35(1): 93 (20 pages).
Peuquet, D. J. (2002). Representation of Space and Time. New York, The Guilford Press.
11
Peuquet, D. J., et al. (1998). The ontology of fields: Report of a Specialist Meeting Held under
the Auspices of the Varenius Project. Bar Harbor, Maine, the National Center for
Geographic Information and Analysis (NCGIA): 42.
Pfoser, D. and C. S. Jensen (2001). Querying the trajectories of on-line mobile objects. the 2nd
ACM international workshop on Data engineering for wireless and mobile, Santa
Barbara, California, United States, ACM Press.
Pfoser, D., et al. (2003). "Generating semantics-based trajectories of moving objects
Building temporal topology in a GIS database to study the land-use changes in a rural-urban
environment." Computers, Environment and Urban Systems 27(3): 243-263.
Randviir, A., et al. (2004). "Spatialization of knowledge: Cartographic roots of globalization
A new assessment of European forests carbon exchanges by eddy fluxes and artificial neural
network spatialization." Semiotica 150, no 1: 227-256 (30 pages).
Skupin, A. and S. I. Fabrikant (2003). "Report Papers - Spatialization Methods: A Cartographic
Research Agenda for Non-geographic Information Visualization." Cartography and
geographic information science 30(2): 99 (22 pages).
Stroud, J. R., et al. (2001). "Dynamic models for spatiotemporal data." Journal of the Royal
Statistical Society: Series B (Statistical Methodology) 63, no 4: 673-689 (17 pages).
Takeyama, M. and H. Couclelis (1997). "Map dynamics: integrating cellular automata and GIS
through geo-algebra." International Journal of Geographical Information Science 11(1):
73-91.
Topping, B. H. V., et al. (2003). Finite element mesh generation, Saxe-Coburg Publications.
Yuan, M. (1999). "Representing geographic information to enhance GIS support for complex
spatiotemporal queries." Transactions in GIS 3(2): 137-160.
Yuan, M. (2001). "Representing Complex Geographic Phenomena with both Object- and Fieldlike Properties." Cartography and Geographic Information Science 28(2): 83-96.
12