Trade Study
advertisement

Trade Study
Shaft Design and Flywheel Dimensioning
Kyle Becker
Pedal Pure
10/12/06
Abstract
The purpose of this report is to optimize the flywheel and dimension the shaft used in
Pedal Pure’s human-powered water still. Flywheel equations derived from conservation of
energy principles are used in conjunction with design parameters and constraints to yield an
optimization diagram indicating the flywheel should be a disk with diameter 0.15 m and
thickness 0.013 m. Principles of static equilibrium are used in parallel with the Distortion
Energy Theory to show the shaft must be at least 0.108 m in diameter to avoid both large
deformations and failure. These results have a direct and instant impact on both the design and
progression of Pedal Pure’s concept; the feasibility of their design is reinforced by this study and
the results presented will assist them in component purchasing and selection.
Introduction
Pedal Pure is designing a human-powered
water still. The current concept calls for a rotating
shaft to transfer power between the rear wheel of a
bicycle and a generator. A flywheel will be mounted
to this shaft to minimize variations in shaft acceleration. The
purpose of this study is twofold; to determine the minimum shaft
Figure 1: Two dimensional
representation of shaft
configuration
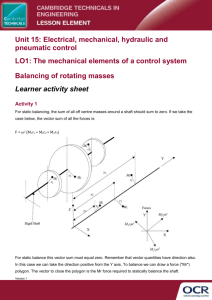
diameter needed to withstand the proposed loading and also to optimize the
flywheel geometry (see Figure 2) within given design constraints. The
results of this study will have a direct and immediate impact on Pedal
Pure’s design. When selecting a shaft from a supplier, the diameter
recommended by this study will serve as the minimum allowable design
Figure 2:
Flywheel
geometry
1
dimension; further, they should attempt to purchase a flywheel with dimensions as close to those
optimized by this study. The set-up to be analyzed is shown in Figure 1.
Sources and Methods
The methods used in this study are largely based on information presented in Chapter 11
of Fundamentals of Machine Elements. Two sections of this text provide step-by-step problem
solving approaches for shafts and flywheels used in configurations similar to Pedal Pure’s
design.
Several assumptions are made in both the text and this report. Most significantly, the
mass of the shaft is neglected. While this simplification introduces some error into the final
value, the margin of this error is small and will be compensated for by the built-in factor of
safety. Secondly, the actual system has been idealized in several ways; axial loading is
neglected; it is assumed that the bearings and shaft are perfectly aligned and concentric, and it is
assumed that the flywheel is a perfect cylinder. These assumptions have been introduced to
simplify the model for analysis and introduce only minor errors into the final value. The only
limitation on information pertains to the generation of the torque diagram, as it was very difficult
to determine at which points during the pedaling cycle energy is drawn from the flywheel.
Several riders were videotaped and polled in order to determine at which points the rider is
unable to provide power to the shaft (see Appendix for torque diagram.).
The flywheel geometry must first be optimized and then the minimum required shaft
diameter can be found. In dimensioning the flywheel, both its diameter and composition are
considered design variable (see Table 1), but the group has already decided to fabricate the
flywheel from a cylindrical piece of medium carbon steel. Solving for the flywheel geometry
consists of applying conservation of energy principles to link the design parameters and state
variables.
2
Design Variables
diameter
material
Design Parameters
torque cycle
coefficient of fluctuation
angular velocity of shaft
State Variables
mass
mass moment of inertia
thickness
KE per torque cycle
Constraints
thickness < 10 cm
diameter < 15 cm
Table 1: Design Parameters and Variable for Flywheel Design
The designer can then select a diameter such that all constraints are met. As there are an infinite
number of diameters that satisfy the governing equations, the particular design instantiation with
the most merit must be selected. In this case the best flywheel is the one with the least mass that
does not exceed either constraint.
The first step in designing the shaft is to use static equilibrium to determine all forces and
moments acting on the shaft. From these forces, bending moment diagrams are constructed and
used to identify the maximum moment in the shaft. The Distortion Energy Theory (DET) is then
applied to determine the smallest diameter at which failure will being to occur.
The following table identifies important parameters and variables associated with
designing the shaft. Determining the diameter with the most merit is simple; as Pedal Pure does
not want to over-design their shaft, the best shaft is the one with the smallest diameter that will
not fail or deform excessively. Thus, two constraints are imposed on the shaft; it cannot fail and
should not have excessive deformations. Diameters that satisfy the DET will meet both criteria.
Design Variables
Design Parameters
diameter
geometry (position of
supports, loads etc.)
State Variables
coefficient of friction
between tire and shaft
material
mass
deflection
torque applied to shaft
loads applied to shaft
Constraints
e > Sy / ns
[Von Mises stress > yield
stress / factor of safety] as
satisfied by DET
minimal deformation
Table 2: Design Parameters and Variables for Shaft Design
3
Results
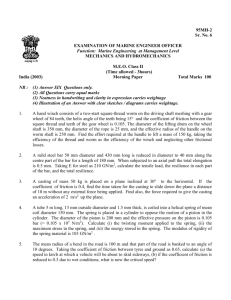
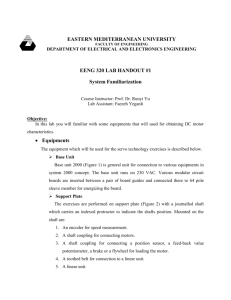
The plot to the right is the
16
14
flywheel optimization diagram. It
provides all the information needed to
appropriately select the flywheel
geometry. The solid curve plots
flywheel thickness [cm]
12
10
5 kg
8
4 kg
6
3 kg
2 kg
4
thickness as a function of diameter. The
1 kg
2
vertical lines with arrows indicate
0
8
10
geometrical constraints imposed by the
design configuration. The dotted lines are
12
14
16
flywheel diameter [cm]
18
20
Figure 3: Flywheel optimization tool
constant-mass curves. The design instantiation with the most merit is the rightmost allowable
point on the solid curve (denoted by the x). This point corresponds to the lightest acceptable
flywheel that will fit in Pedal Pures’s design. The flywheel dimensions and corresponding mass
are:
Diameter = 0.15 m
Thickness = 0.0127 m
Mass = 1.76 kg
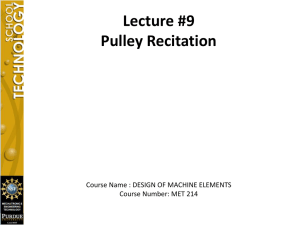
The three-dimensional free body diagram of the shaft is shown below. Applying force
and moment equilibrium to the shaft yields the following forces (see Appendix for specific
calculations):
Fay
Faz
Fby
Fbz
101.0 N
114.9 N
101.0 N
104.5 N
Table 3: Bearing support
forces acting on the shaft
Figure 4: 3-D shaft geometry and forces
4
The shear and bending moment diagrams can then be generated for both the XZ and XY planes
(See Appendix). From the moment diagrams the maximum moment was found to be 21.80 Nm.
Using the shaft torque (T) of 1.0 Nm, the DET yields a minimum shaft diameter of:
dshaft > 0.108 m
Discussion
As illustrated by the results sections, all goals of this study were met; the flywheel was
dimensioned and the minimum shaft diameter was specified. Appropriate simplifications were
made to the shaft-flywheel system, as suggested in Fundamentals of Machine Elements. These
assumptions facilitated the development of the analytical tools used to determine the geometry of
both components. The tool for the flywheel, shown in Figure 3, worked exactly as planned. As
expected this plot showed an inverse relationship between diameter and thickness. The ideal
flywheel would be a ring with all its mass at its outer edge. As Pedal Pure’s design and
manufacturing capabilities do not allow this shape, a large diameter disk with a thin profile is the
next best solution. Increasing the allowable diameter would further reduce the flywheel’s mass,
but at 13 mm thick, it is already sufficiently thin.
Simplifications applied to the shaft allowed the DET to be used to identify shaft’s
minimum required diameter. The only issue in using this technique was selecting the factor of
safety. While Pedal Pure does not want this shaft to fail, they also wish to avoid any overdesign. As failure of this shaft does not pose any immediate health or safety risks, a safety factor
of 2.0 was chosen. A shaft with diameter greater than 0.108 m will provide Pedal Pure with a
component that will not fail or deform excessively under the given loading conditions.
5
While no experiments were performed to validate the analytical tools used and developed
in this report, the values determined were compared with existing designs in the marketplace.
Windstream power uses a 3.6 kg flywheel while a product called the PedalPusher employs a 1.5
kg flywheel; both values are in agreement with the recommended mass of 1.76 kg. (Windstream
uses a larger mass because their product is designed to output a very smoother electrical signal.)
Shaft diameters for similar products could not be found, but Pedal Pure will be constructing a
prototype to validate both recommendations made in this study. Moreover, the tools developed
in this report were verified by comparison with known solutions. These solutions were
generated by hand.
These results have an immediate and positive impact on Pedal Pure’s design. This
analysis not only verifies the feasibility of their design, but also provides the group with concrete
values upon which to make further design and purchasing decisions. Both the minimum required
shaft diameter and optimal flywheel have been identified for their human-powered water still.
Sources
1.
Hamrock, Schmid and Jacobson. Fundamentals of Machine Elements. Boston:
McGraw-Hill. 1999.
2.
http://hypertextbook.com/facts/2005/steel.shtml
3.
www.windstreampower.com
4.
http://www.los-gatos.ca.us/davidbu/pedgen.html
6
Appendix
Sizing Flywheel
Governing Equations:
Torque
power
max
KE
(T T
l
avg
)d
min
Im
Im
KE
2
C f avg
32
d 4 t h
Specific Design Values:
Coefficient of Fluctuation (Cf) = 0.002 (1)
Power = 140 W
ω = 1750 RPM
7
MatLab Code:
clear all;
% Size the Flywheel
Power = 140;
% motor power (W)
RPM = 1750;
% generater RPM
Wavg = RPM * (2*pi)/60; % generater ang vel (rad/s)
Tmotor = Power / Wavg;
% torque applied to motor shaft (N*m)
delta = (pi/6);
Cf = 0.002;
rho = 7850;
% torque diagram interval (rad)
% coefficient of fluctuation
% density of flywheel (kg/m^3)
Tavg = (delta/pi)*(Tmotor); % avg torque (N*m)
KE = (Tmotor - Tavg)*delta;
dia = 0.08 : .005 : 0.2;
x = length(dia);
for i = 1:x
th(i) = (32*KE) / (Cf*pi*rho*(Wavg^2)*(dia(i)^4));
end
% calc thickness as a fcn of diameter
plot(dia*100,th*100,'r')
hold on;
%grid on;
xlabel('flywheel diameter [cm]');
ylabel('flywheel thickness [cm]');
for M = 1:5
% add constant mass lines to previous plot
for i = 1:x
thm(i,M) = (4*M) / (rho*pi*dia(i)^2);
end
plot(dia*100,thm(:,M)*100,'k:')
end
df = input('Enter flywheel diameter in cm: ')/100;
% chosen flywheel diameter (m)
thf = (32*KE) / (Cf*pi*rho*(Wavg^2)*(df^4));
% corresponding flywheel thickness (m)
Mf = 0.25*pi*thf*rho*df^2;
% corresponding flywheel mass (kg)
8
Shaft Diameter
Governing Equations:
Torque F * r * N *
d
2
M 0
F 0
32n s
d
S y
3
M2 T2
4
1
3
Specific Design Values:
coefficient of static friction (μ) = 0.7
torque = 1.0 N*m
factor of safety (ns) = 2.0
(2)
9
10
11
Matlab Code:
mu = 0.7;
Tb = 1.0;
dsa = 0.01;
% tire/shaft coeff of static friction
% max torque transfer between shaft and tire (N*m)
% assumed shaft diameter (m)
N = (2*Tb)/(mu*dsa);
% normal force between tire and shaft (N)
theta = (pi/4);
% angle between tire and shaft
% shaft geometrical constants (m)
a = 0.06;
b = 0.15;
c = 0.30;
g = 9.81;
% acceleration due to gravity (m/s^2)
Fbz = (g*Mf*a + N*sin(theta)*b) / c
Faz = g*Mf + N*sin(theta) - Fbz
Fby = (N*cos(theta)*b) / c
Fay = N*cos(theta) - Fby
% from summing moments about y axis
% from force equilibrium in z direction
% from summing moments about z axis
% from force equilibrium in y direction
% The following formulae apply becuase the max moment and torque always
% occur at x = L/2
Mxz = Fbz*(c-b);
Mxy = Fby*(c-b);
Mmax = (Mxz^2 + Mxy^2)^0.5;
Tmax = Tb;
ns = 2;
% shaft factor of safty
Sy = 350*10^6;
% yield strength of shaft material (Pa)
ds = [[(32*ns)/(pi*Sy)] * (Mmax^2 + 0.75*Tmax^2)^0.5 ]^(1/3);
% calculated shaft diameter (m)
12