EENG 320 LAB HANDOUT #1 System Familiarization
advertisement

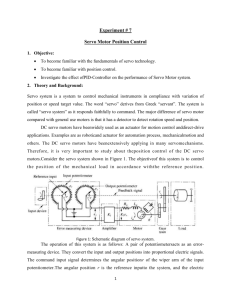
EASTERN MEDITERRANEAN UNIVERSITY FACULTY OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EENG 320 LAB HANDOUT #1 System Familiarization Course Instructor: Prof. Dr. Runyi Yu Lab Assistant: Faezeh Yeganli Objective: In this lab you will familiar with some equipments that will used for obtaining DC motor characteristics. Equipments The equipment which will be used for the servo technology exercises is described below. Base Unit Base unit 2000 (Figure 1) is general unit for connection to various equipments in system 2000 concept. The base unit runs on 230 VAC. Various modular circuit boards are inserted between a pair of board guides and connected there to 64 pole sleeve member for energizing the board. Support Plate The exercises are performed on support plate (Figure 2) with a journalled shaft which carries an indexed protractor to indicate the shafts position. Mounted on the shaft are: 1. An encoder for speed measurement. 2. A shaft coupling for connecting motors. 3. A shaft coupling for connecting a position sensor, a feed-back value potentiometer, a brake or a flywheel for loading the motor. 4. A toothed belt for connection to a linear unit. 5. A linear unit. Next the shaft there is a motor attachment with four snap locks. Figure 1.Base Unit 2000. Figure 2.The Suppot Plate. Motors The various servo motors are mounted on a plate which is fitted to the servo system attachment and locked in position by turning the snap locks. The motor shaft is then mounted in line with the shaft and fixed in a position where it ahs been jacked into the shaft coupling. Figure 3. The motors are connected with bayonet coupling turned through 90. The Servosystem 2000 training kit includes the following servo motors: 1. 12 V DC servo motor for direct connection to the servo system. 2. 12 V DC servo motor with in-built gear for reducing the shaft speed. 3. AC Stepper motor, 1.8 0 / step. An AC servo motor can also be connected together with drive stage; see Servo Amplifier presentation overleaf. Sensors A digital pulse sensor (Figure 4), known as an encoder, is permanently mounted on the journalled shaft. When the shaft rotates, a pulse disc with a large number of paths rotates with it. In the sensor, the pulse disc is combined with a light source and photodiodes. The pulse disc emits 500 pulses per revolution and consist of two channels, so that it can also indicate the direction of rotation. Figure 4.The pulse disc, showing light source and photodiodes. Analogue position sensor (Figure 5), an analogue position sensor can be connected via a shaft coupling. This is a potentiometer, the moving part of which follows the torsion of the shaft. The potentiometer is single-wound, with an electric angle of 320 0 . The potentiometer has no end stop, and it accompanies the shaft, continuously changing its resistance. Servo Amplifier Various electronics boards, connected to Base Unit 2000, are used for driving the different motors. The following control boards (Figure 6) are used: 1. Servo regulator, SR1. 2. Velocity control module, SR2. 3. Position control module, SR3. 4. Stepper Motor module, SM1. Figure 5. The potentiometer is connected to the servo system shaft by means of a shaft. Figure 6. The control boards. Flywheel Servosystem 2000 is loaded by connecting a flywheel (Figure 7) to the motor by means of shaft coupling. The flywheel weighs 300 g. Figure 7. The flywheel fitted to the base plate. Generator brake For stepless adjustment of various loads, a generator brake is connected to the motor shaft. The brake action can be varied by means of a potentiometer. Linear unit Movement with a linear unit (Figure 9) is used for a fast feed movement over a short distance. The combination of screw and nut makes for steady, even travel. The linear unit has a 140 mm stroke and a millimeter scale showing 70 n~ 0 n~ 70 and with an index on the carriage. The linear unit is driven by the various motors via a spocket, a toothed belt and belt tensioner. The linear unit has a pitch of 1 mm/rev, which is vital to accuracy. The speed of travel depends on the screw pitch coupled with the motor speed. As a precaution, the linear unit moves to an end position. Figure 8. The generator brake mounted on the motor shaft. Figure 9. The linear unit mounted on the support plate.