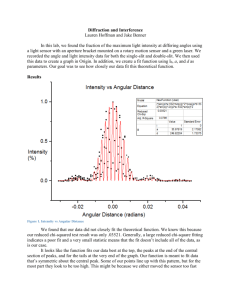
to view the document. - UROP - University of California, Irvine
advertisement

Simulation and Experimental Studies of Biomechanics at the Micro-Scale Elizabeth Nettleton, Chemistry University of South Dakota Faculty Mentor: Dr. William Tang and Graduate Student Mentor: Gloria Yang Biomedical Engineering University of California, Irvine -1- Abstract Micro-structured biomechanical devices, specifically sensors, offer great potential in the medical field. For instance, bone strain sensors may possess the capability to provide information on disease progression in the cases of bone tumors, osteoporosis, and the like. Prosthetic heart valves offer a new life to patients, but as the valves age, they weaken, threatening a fatal breakage. By adhering a micro-sensor for measuring strain to the prosthetic tissue, one could potentially track the weakening of the valve and consequently design a better prosthesis based upon acquired real-time data. Multiple Biomedical Engineering labs have worked on projects involving bone strain sensors, but the heart valve project is unique. This Micro-Biomechanics Lab currently pursues both projects. They are multi-faceted problems involving issues such as device characterization using computer modeling and physical experiments and the testing of biological adhesives and their effects on the biological tissue. Also, further modeling can predict the tolerable level of heat dissipated from the sensor electronics to avoid thermal damage to surrounding tissue. Use of the MEMS module of COMSOL Multiphysics provided simulations modeling the spring constants of the cantilever sensors which will ultimately be used to map the compliances of the heart valve. A Wheatstone bridge provided the means by which to calibrate the fabricated device by tracking the relative change in resistance with respect to the cantilever deflections. Later, the simulated values will be compared to data collected taking physical measurements with the fabricated device. Ongoing work involves the evaluation biological adhesives, modeling the resonant frequencies of the device, and performing COMSOL simulations to map the heat transfer from the sensor into biological tissues. -2- Key Terms Bioadhesive Biomechanics Cantilever Sensor Piezoresitivity Strain Gauge Figure 1: Cantilever Sensor Figure 2: Strain Gauge Wheatstone Bridge Introduction Biomechanics, the application of physics, engineering, and the like to describe the body in motion, offers multiple applications in the healthcare world. Two such applications lie in the use of strain sensors to map heart valve compliances and measure strain in bone. With the successful mapping of a heart valve, a more complete understanding of the valve will be reached, and researchers may be able to complete projects such as designing a better prosthesis. Bone strain sensors offer great hope in the tracking of disease progression. For instance, bone tumors and osteoporosis lead to a weakened skeletal system, and consequently, more strain exists in affected bones. Thus, by measuring the strain a diseased bone experiences, one may be able to predict the disease’s progression and the bone’s progress in healing and regeneration. This lab has previously designed two sensors, a cantilever sensor and a strain gauge, to perform the heart tissue mapping and the bone strain measurements, respectively. See Figures 1 and 2 (above). Both sensors are constructed from a piezoresistive material, gold, such that their resistances change as the device experiences strain. The lab has evaluated its strain gauge and published material based upon its success (Yang et al., 2004 and Yang et al., -3- 2005). The work with the heart valve, however, is new and the sensor is still in its development and characterization stages. Previous studies have begun to explore the characterization of aortic heart valve tissue in the hopes of designing a better prosthesis (Mirnajafi et al., 2003 and Mirnajafi et al., 2004). This lab hopes to further the research presented in these studies. Specifically, this project will consist of three primary and distinct sections. The first will focus on simulations using the COMSOL Multiphysics modeling program. The program will be used to model the spring constant and resonant frequencies of the cantilever sensor within the cantilever device. Previous studies have shown that implanted devices have the capability of causing a non-negligible temperature rise in the body (Lazzi 2005). Therefore, COMSOL will also be used to ensure that the strain gauge sensor, when implanted in biological tissue, will not cause the tissue temperature to rise above a safe level. This lab has estimated that thermal damage will occur with a temperature increase above 1 °C. The second portion of this study will focus on utilizing a probe station to characterize the cantilever device. The device’s change in resistance with sequential cantilever beam displacement will be monitored. Two different methods of measurement will be studied—the first using a digital multi-meter to measure changing resistance directly, the second utilizing a Wheatstone bridge to indirectly measure the changing resistance. In a Wheatstone bridge, four resistors are used—three known, and one, the cantilever, is not. A changing peak to peak voltage through the circuit is caused as the cantilever is displaced. This voltage change will be related to changing resistance. Following the data collection will be analysis. Each data set will be graphed and several best-fit lines will be generated in -4- Excel. Both the methods and analysis techniques will be compared in order to determine the most effective method. Finally, the third part of the experiment will focus on the research and evaluation of bioadhesives. The adhesives will be used to bond the devices to biological tissue and therefore much be biocompatible and allow faithful transmission of surface tension to the sensor. This data, as well as all other findings of this project, will be used in the future to assist the Tang Bio-Micromechanics lab in their design and implementation of micro-structured sensors. Methods and Materials COMSOL Simulations Computer simulations in this project were performed using COMSOL Multiphysics 3.2. Several simulation types were addressed and some are still works in progress. The first involved the modeling of the cantilever sensor of the heart valve device in order to find its spring constant. The second also involves the modeling of the cantilever sensor, this time to find its resonant frequency. The third and final simulation models a strain gauge implanted in biological tissue, on bone beneath muscle. This simulation will be used to model the heat transfer from the device to the tissue in order to ensure its safety. The simulation used to find the spring constant of the cantilever sensor was performed in the 3D MEMS Module: Solid, Stress-Strain application. The beam was modeled from SU-8, Young’s Modulus 4.02 GPa and Poisson’s Ration 0.11. Four beam lengths were modeled, 500 μm, 700μm, 1000μm, and 1200μm. Each length had a width of 108μm and thickness 15 μm. One end of the beam was fixed while masses varying in 2 mg increments from 1mg to -5- 15 mg were applied to the opposite end. The forces generated by these masses resulted in a maximum displacement in each simulation (See Figure 3). This maximum displacement, when used with the force data, was used to calculate the spring constant of the cantilever using the following equation: k F x (1) Where k is the calculated spring constant (N/m), F is the applied force (N), and x is the maximum displacement (m). These simulated spring constants were then compared to Figure 3; Force and Displacement theoretical values calculated using the following equation: Ewt 3 (2) k 4l 3 Where k, again, is the spring constant, E is the effective Young’s modulus (see Equation (3)) of the material (Pa), w is the width of the beam (m), t is the thickness of the beam (m), and l is its length (m). E Y (3) 1 p2 Where E is the effective Young’s Modulus, Y is its bulk Young’s modulus and p is the material’s Poisson’s ratio. -6- The second simulation was also modeled in the MEMS Module Solid, Stress-Strain application and the modeled beam dimensions were the same. It was, however, drawn first in 2D and then underwent a mesh extrusion to create the 3D model (See Figure 4). An eigenfrequency analysis was then Figure 4: Eigenfrequency Analysis performed without a load on the cantilever. This simulation requires much ongoing effort. Currently frequencies simulated by COMSOL do not coincide with theoretical values generated by the following equations: fn EI m 2 2L n2 (4) n 1.87510407, 4.69409113, 7.85475744, 10.99554073, 14.13716839, 20.4203521 Where f is the frequency, n is the mode, βis one of the given values, E is the Effective Young’s Modulus (Pa), I is the moment of inertia, m is the mass (kg), and L is the length (m) of the beam. The final COMSOL model involves the modeling of the other device—the bone strain sensor. This model requires the use of two 3D COMSOL applications: the MEMS module Conductive Media DC application as well as the COMSOL Multiphysics module Heat Transfer through Conduction application. -7- This model was drawn by creating a rectangle of length 0.1m, width 0.5m, and thickness 0.0281 m to represent a bone. On top of this bone the device was modeled. Its base is a rectangle of Parylene C of length 3cm, width 2.8cm, and thickness 50μm. A gold coil of thickness 200μm represented by a square with sides 25mm and centered square hole with sides 7mm lies atop the Parylene C. Within the hole, a square gold sensor with sides 2mm and thickness 0.1μm and a square silicon chip with sides 2mm and thickness Figure 5: Bone Strain Sensor Model 250μm are located. Atop the device, two rectangles with lengths and widths equivalent to the bone, and thicknesses 0.015m and 0.0025m represent muscle and skin, respectively. See Figure 5 for a representation of the model. Figure 5: Heat Transfer Model The following tables contain the physical properties imputed into COMSOL for each of the materials at varying powers in order to complete the models: Table 1 Constant Material Properties Electrical Conductivity (S/m) Thermal Conductivity (W/mK) Density (kg/m^3) Heat Capacity (J/(Kg°C) Parylene C 2.00E-04 0.082 1289 711.79 Gold 4.10E+07 60 19320 128 Silicon 0.100 157 2329 700 Bone 0.0285 0.300 1810 1300 Muscle 0.5476 0.498 1040 3600 Skin 0.0371 0.42 1010 3500 -8- Table 2 Varying Material Properties Coil Sensor Heat Power Resistance Current Density Source Resistance (mW) (Ohm) (A/m^2) (W/m^3) (Ohm) 10 8.68E-04 7.669E+05 1.563E+05 2160 Current Density (A/m^2) 8.784E+06 Chip Heat Source Resistance (W/m^3) (Ohm) 1.667E+10 1.00E+08 Current Density (A/m^2) 1.155E+01 Heat Source (W/m^3) 3.333E+06 20 8.68E-04 1.085E+06 3.125E+05 2160 1.242E+07 3.333E+10 1.00E+08 1.633E+01 6.667E+06 30 8.68E-04 1.328E+06 4.688E+05 2160 1.521E+07 5.000E+10 1.00E+08 2.000E+01 1.000E+07 40 8.68E-04 1.534E+06 6.250E+05 2160 1.757E+07 6.667E+10 1.00E+08 2.309E+01 1.333E+07 50 8.68E-04 1.715E+06 7.813E+05 2160 1.964E+07 8.333E+10 1.00E+08 2.582E+01 1.667E+07 60 8.68E-04 1.878E+06 9.375E+05 2160 2.152E+07 1.000E+11 1.00E+08 2.828E+01 2.000E+07 70 8.68E-04 2.029E+06 1.094E+06 2160 2.324E+07 1.167E+11 1.00E+08 3.055E+01 2.333E+07 80 8.68E-04 2.169E+06 1.250E+06 2160 2.485E+07 1.333E+11 1.00E+08 3.266E+01 2.667E+07 90 8.68E-04 2.301E+06 1.406E+06 2160 2.635E+07 1.500E+11 1.00E+08 3.464E+01 3.000E+07 100 8.68E-04 2.425E+06 1.563E+06 2160 2.778E+07 1.667E+11 1.00E+08 3.651E+01 3.333E+07 This project, like the previous, is an ongoing endeavor. To finish the modeling, first the Conductive Media DC model must be completed, and, from there, running the Heat Transfer through Conductive application will be possible. If the surrounding biological tissue does not experience a temperature increase greater than 1 °C, the device is safe for in vivo use. Probe Station Measurements In order to characterize our device and its response to cantilever displacement, several trials utilizing two techniques were performed using a probe station. In both methods, the device was placed on a stage and a microscope and probe were used to displace the cantilever beam 275 μm in 5 μm increments. After each displacement, measurements were obtained. The first technique allowed one to measure the changing resistance of the device directly using a digital multimeter. The multimeter connected directly to the device and as the beam of the device was displaced, the multimeter provided information on the device’s changing resistance, in ohms. -9- The second method necessitated the use of a Wheatstone bridge within a circuit and the measurement of changing peak to BPF peak voltage following each displacement. This Figure 6: Wheatstone Bridge Circuit apparatus consisted of far more components than did the previous. See Figure 6 for schematic of the circuit used. It contained three discrete resistors (R1, R3, R4), a cantilever sensor (R2), amplifiers (A), and a band pass filter (BPF). In addition to the circuit, a power supply, function generator, oscilloscope, and digital multimeter were also used. The digital multimeter was used to measure the initial resistance of the device prior to each the trial. The power supply provided a potential of 15 Volts to the circuit. The function generator output an alternating voltage with peak-to-peak voltage of 200 mV at a frequency of 1.00 KHz. The oscilloscope provided graphs of the input voltage and the output peak-to-peak voltage, which increased as the cantilever sensor was displaced. The following equation was then used to relate changes in peak to peak voltage to changing resistance: R (0.5 V V) (0.5 V ) V R R0 (5) Where ΔR is the changing resistance, ΔV is the changing peak to peak voltage, V is the input voltage, R is the resistance of the other three resistors and R0 is the initial resistance of the cantilever beam. - 10 - Following eight trials from each technique, the data from each set was entered into Microsoft Excel and graphs were generated graphing changing resistance against displacement. Several lines of best fits were generated for both data sets—one that forced the line through zero, one that did not, and one that did not include the first data point at all. The slopes of each of these graphs were analyzed and the slopes were analyzed by calculating their average, extrema, and standard deviation. In such a manner, the techniques could be compared in order to quantify the device’s behavior as well determine the more precise method of data collection. Adhesive Research and Testing After researching several biological adhesives, multiple adhesive samples were requested. Due to lack of Federal Drug Administration approval and other issues, some requested adhesives were unavailable to Table 3: Adhesive Requests Adhesive Requests Status research labs, but as of present, two samples have been obtained—Ethicon’s Dermabond™ and BD Biosciences’ Cell-Tak™. Requests, both for samples Company Adhesive Baxter Healthcare Corp Tisseel VH Fibrin Sealant BD Biosciences Cell-Tak Cohesion Technologies Inc CoSeal Hyrdrogel Cohesion Technologies Inc CoStasis Hemostat Spray Cryolife Inc Bioglue Cryolife Inc FibRX Johnson & Johnson/Ethicon Dermabond Microval Plasmaseal GRFG/GRF Plasmaseal Response Considering Purchase Arrived-Awaiting Testing Samples Unavailable Samples Unavailable Awaiting Board Decision Samples Unavailable Currently Testing No FDA Approval Unsuitable for Project and for product prices, are still being sought in the cases of other potential bioadhesives. See Table 3 for a summary of adhesive requests. Dermabond™, one potentially effective bioadhesive, is currently being evaluated. According to Ethicon representatives, Dermabond is one of two topical skin adhesives holding FDA approval. It is an octylcyanoacrylate giving the adhesive the ability to flex with tissue movement. Also because of its octyl molecular geometry, the adhesive does not dry immediately. The user will have approximately 30 seconds of working time. Finally, the - 11 - adhesive will remain intact until the tissue to which it is attached begins to slough. All of these traits make it a promising adhesive worthy of investigation. Although Dermabond™ is currently the only adhesive on which tests are being performed, several tests will be used to evaluate all received bioadhesives for their effectiveness. As for current testing, Dermabond™ was used to adhere a prototype of the bone strain sensor mounted on PDMS to a foam block. The block is being photographed and monitored for seven days, the length of a typical experimental study. Other tests that will ultimately be performed on this and other adhesives include testing the adhesion of a strain gauge to a bone after soaking it in a saline-based solution and measuring changes in the mechanical properties of heart valves after application.. Results COMSOL Simulations In the simulation of COMSOL Simulation-Force vs Displacement varying forces placed on 1.600E-07 the cantilever of the were obtained. The y = 1.0698x - 1E-11 y = 0.3668x + 3E-12 1.200E-07 Force (N) device, displacements y = 2.9288x + 6E-10 1.400E-07 y = 0.2122x + 3E-12 1.000E-07 8.000E-08 6.000E-08 4.000E-08 following graph (Figure 7) 2.000E-08 0.000E+00 generated in Excel plots force versus displacement 0.000E+00 1.000E-07 2.000E-07 3.000E-07 4.000E-07 5.000E-07 6.000E-07 7.000E-07 Displacement (m) 500 Micrometers 700 Micrometers 1000 Micrometers 1200 Micrometers Linear (1200 Micrometers) Linear (1000 Micrometers) Linear (1000 Micrometers) Linear (700 Micrometers) Linear (500 Micrometers) and the resulting slopes Figure 7: COMSOL Results are equivalent to the spring constant of the device. - 12 - The theoretical spring constants generated by COMSOL were then compared to the theoretical results obtained using the above Equation (1). The percent difference between the two methods of obtaining Table 4: Data Comparison Comparing Theoretical and Calculated Spring Constants (N/m) theoretical data was always less Theoretical Value Simulated Value Percent Difference than 1.311% (See Table 4). The theoretical data obtained will later be compared to the actual 500 μm 700 μm 1000 μm 1200 μm 2.967 1.081 0.371 0.215 2.9286 1.0698 0.3668 0.2122 1.303% 1.041% 1.139% 1.311% properties of the device. The COMSOL simulation addressing the resonant frequency of the cantilever within the device as well as the one modeling the heat transfer from an implanted device into biological tissues require further attention. Neither has produced acceptable results as of yet, but through ongoing work in the laboratory, both should be completed soon. Similarly to the theoretical spring constants, the resonant frequency results will ultimately be compared to the actual properties of the device. Through the heat transfer model, the lab hopes to verify that surrounding biological tissue will not suffer from thermal damage as a result of an implanted device. Probe Station Measurements Using the digital multimeter, eight data sets were collected, measuring changing resistance directly. The data sets were entered into Microsoft Excel and several graphs were generated in Microsoft Excel plotting changing resistance against displacement. Then, lines of best fit were generated three different ways. The first forced the line of best fit through zero while the second did not, and the third eliminated the first data point completely (See Figures 8-10). Analysis of the data was also obtained, finding the average, extrema, and standard deviation of the slopes of the lines of best fit (See Table 5). - 13 - B4-Delta R (MM) 0.07 Table 5: Multimeter Data Analysis Analysis of Delta R Graphs (Multimeter) 0.06 0.05 Delta R (ohms) Graph: B4-Delta R: Forced Through Zero Slopes 2.417E-04 2.333E-04 2.263E-04 2.160E-04 2.149E-04 2.210E-04 2.196E-04 2.005E-04 Average Standard Deviation Maximum Minimum 2.217E-04 1.247E-05 2.417E-04 2.005E-04 0.04 0.03 0.02 0.01 0 0 50 100 150 200 250 300 Displacement (micrometers) Linear (Trial One) Linear (Trial Two) Linear (Trial Three) Linear (Trial Four) Linear (Trial Five) Linear (Trial Six) Linear (Trial Seven) Linear (Trial Eight) Graph: B4-Delta R: Not Forced Through Zero Figure 8: Forced through Zero B4-Delta R (MM) Slopes 0.07 2.215E-04 Average 2.130E-04 2.345E-04 Standard Deviation 1.431E-05 2.150E-04 2.133E-04 Maximum Minimum 2.345E-04 1.836E-04 0.06 0.05 2.078E-04 Delta R (ohms) 0.04 2.130E-04 2.150E-04 1.836E-04 0.03 0.02 Graph: B4-Delta R: First Data Point Eliminated 0.01 0 0 Slopes 2.350E-04 2.131E-04 2.103E-04 2.122E-04 2.049E-04 2.097E-04 2.130E-04 Average Standard Deviation Maximum Minimum 50 100 150 200 250 300 -0.01 2.093E-04 1.601E-05 2.350E-04 1.765E-04 Displacement (micrometers) Linear (Trial One) Linear (Trial Two) Linear (Trial Three) Linear (Trial Four) Linear (Trial Five) Linear (Trial Six) Linear (Trial Seven) Linear (Trial Eight) Figure 9: Not Forced through Zero B4-Delta R (MM) 1.765E-04 0.07 0.06 The Wheatstone bridge data was Delta R (ohms) 0.05 evaluated in a similar manner, with one exception. The data collected using the 0.04 0.03 0.02 circuit and Wheatstone bridge relayed 0.01 changing peak to peak voltage but in order 0 0 50 100 150 200 250 Displacement (micrometers) to compare the two methods, information on changing resistance was preferable. - 14 - Linear (Trial One) Linear (Trial Two) Linear (Trial Three) Linear (Trial Four) Linear (Trial Five) Linear (Trial Six) Linear (Trial Seven) Linear (Trial Eight) Figure 10: Eliminate 1st Data Point 300 Thus, all data had to be converted using the above Equation 5 before graphing it in Excel, adding lines of best fit (See Figures 11-13), and analyzing the slopes (See Table 6). B4- Delta R (Wheatstone Bridge) Table 6: Wheatstone Bridge Data Analysis Graph: B4-Delta R: Forced Through Zero Delta R Analysis of Delta R Graphs (Wheatstone Bridge) 0 . 1 2 0 0 0 . 1 0 0 0 0 . 0 8 0 0 0 . 0 6 0 0 0 . 0 4 0 0 0 . 0 2 0 0 Slopes 2.483E-04 2.291E-04 2.396E-04 3.095E-04 3.527E-04 3.202E-04 2.695E-04 2.633E-04 Average Standard Deviation Maximum Minimum 2.790E-04 4.372E-05 0.0000 0 3.527E-04 2.291E-04 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 Displacement Linear (Trial 1) Linear (Trial 2) Linear (Trial 3) Linear (Trial 4) Linear (Trial 5) Linear (Trial 6) Linear (Trial 7) Linear (Trial 8) B4- Delta R (Wheatstone Bridge) Figure 11: Forced Through Zero Graph: B4-Delta R: Not Forced Through Zero 0 . 1 0 0 0 0 . 0 8 0 0 0 . 0 6 0 0 0 . 0 4 0 0 0 . 0 2 0 0 0 . 0 0 0 0 Average Standard Deviation 2.590E-04 2.935E-04 Maximum 3.312E-04 2.101E-04 3.105E-04 3.312E-04 2.399E-04 2.567E-04 Minimum 1.922E-04 1.922E-04 Delta R Slopes 2.378E-04 4.889E-05 0 1 5 0 2 0 0 2 5 0 3 0 0 Average Standard Deviation Maximum Minimum 2.506E-04 5.267E-05 3.357E-04 1.768E-04 Linear (Trial 1) Linear (Trial 2) Linear (Trial 3) Linear (Trial 4) Linear (Trial 5) Linear (Trial 6) Linear (Trial 7) Linear (Trial 8) 3 0 0 B4- Delta R (Wheatstone Bridge) 0 . 1 0 0 0 0 . 0 9 0 0 0 . 0 8 0 0 0 . 0 7 0 0 0 . 0 6 0 0 0 . 0 5 0 0 0 . 0 4 0 0 3.357E-04 0 . 0 3 0 0 2.275E-04 0 . 0 2 0 0 0 . 0 1 0 0 2.539E-04 0 Figure 12: Not Forced Through Zero Delta R 1.977E-04 2.869E-04 2.928E-04 1 Displacement Slopes 1.768E-04 0 -0.0200 Graph: B4-Delta R: First Data Point Eliminated 2.335E-04 5 0 0.0000 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 Displacement Linear (Trial 1) Linear (Trial 2) Linear (Trial 3) Linear (Trial 4) Linear (Trial 5) Linear (Trial 6) Linear (Trial 7) Linear (Trial 8) Figure 10: Eliminate 1st Data Point - 15 - Adhesive Research and Testing As of yet, the adherence of the sensor prototype to the foam block with Dermabond™ appears fairly strong strong. Over the course of seven days it visibly loosened only slightly. When force was applied, the strain sensor could be pulled off, but would not have fallen off of its own accord. Further data evaluating the adherence integrity from this and other tests will be forthcoming in the cases of Dermabond™, Cell-Tak™ , and other adhesives yet to be obtained. Discussion Overall, this project can be considered fairly successful. Although a significant number of tangible results may not have been produced, progress certainly did occur in each of the three overarching divisions of the study—COMSOL simulations, probe station measurements, and adhesive research and testing. By comparing theoretical spring constant data to spring constants found using COMSOL it was proven that successful simulations modeling the displacement caused by applied forces were generated. This data provides mean by which the device can later be evaluated. By comparing actual data to these theoretical data, inherent error will be assessed. Unfortunately, similar data could not be produced using COMSOL to find the resonant frequency of the device. Successful simulation did not occur, and although assistance from product support was sought, the matter requires further research in order to produce meaningful results. Finally, the simulations modeling heat transfer from the bone strain sensor into biological tissue also require further time. Generating the geometry and finding material properties, significant portions of the simulation, were completed, but the project was concluded before the simulations could be completed. Because determining the degree of potential thermal - 16 - damage as a result of implanted devices is essential, other researchers in the laboratory will likely finish the work this study began. The probe station measurements portion of the experiment produced a bit of useful information. First, it can be noted that there exists a correlation in the data produced by the digital multimeter and Wheatstone bridge regarding resistance changes as a result of cantilever displacement. The values are similar. It can also be noted that the standard deviations of the results produced by the multimeter are significantly lower than those produced by the Wheatstone bridge, indicating a problem in the procedure. One possible cause of this elevated standard deviation is the fact that an initial resistance measurement was not taken before each data set in the Wheatstone bridge measurements. Instead, the initial resistances in the multimeter trials were simply averaged and this value was assumed to be the initial resistance of the device in the Wheatstone bridge studies. In the future, this lab will perform similar studies modifying the procedure such that an initial resistance measurement is taken. Lastly, through the probe station data analysis, it was discovered that in both data sets the standard deviation for the slopes produced for the line of best fit forced through zero is significantly lower than the other options. In accordance with this finding, future probe station data produced by this lab will likely be analyzed in this manner only. By researching bioadhesives, this study first provided the lab with products which to pursue as well as requested samples and price information. This information will be valuable in the future. Additionally, initial testing on Dermabond™ indicates that it may be a potential bioadhesive in future studies. Further testing is necessary on this and other bioadhesives, however, in order to ensure this statement. - 17 - Again, this study produced results that will contribute to the ultimate goals of this laboratory. Through COMSOL modeling, it provided a way in which future devices may be evaluated as well as began models that can be completed for future use. Through measurements made using the probe station and consequent data analysis, it discovered the need for procedure refinement in addition to providing information on effective ways to evaluate future data. Finally, in the adhesive evaluation and research, the study provided information to the lab which will be utilized both in future product requests and testing. All of these results contribute to the larger projects currently being pursued by the Tang Micro-Biomechanics Laboratory. Acknowledgements I would like to express my gratitude to my mentor, William Tang, graduate student, Gloria Yang, and the Tang Lab as a whole for your roles in this project. I could not have completed anything without your guidance and understanding. Also, thank you to the National Science Foundation, the University of California, Irvine, and the UROP-IMSURE program for supporting this project. Works Cited Lazzi, Gianluca. “Thermal Effects of Bioimplants.” IEEE Engineering in Medicine and Biology Magizine. September/October 2005. 75-81. Mirnajafi, Ali, Jeremy M. Raymer, Leigh R. McClure, Michael S. Sacks. “The flexural Ridity of the aortic valve leaflet in the commissural region.” Journal of Biomechanics. (2005): 1-8. - 18 - Mirnajafi, Ali, Jeremy M. Raymer, Michael J. Scorr, Michael S. Sacks. “The effects of collagen fiber orientation of the flexural properties of pericardial heterograft biomaterials.” Journal of Biomechanics. (2004): 1-10. Summers, Jason. Personal Interview. 23 August 2006. Thaysen, J, A.D. Yalcinkaya, R.K. Vestergaard, S. Jensen, M.W. Mortenson, P.Vettiger, A. Menon. “SU-8 based piezoresistive mechanical sensor.” The Fifteenth IEEE International Conference on Micro Electro Mechanical Systems, 2002, pp. 320 – 323. Wen. Yu-Hsin, Gloria Y. Yang, Vasudev J. Bailey, Gizela Lin, William C. Tang, Joyce H. Keyak. “Mechanically robust micro-fabricated strain gauges for use on bones.” Proc., IEEE 3rd Cinferece on Microtechnologies in Medicine and Biology. Kahuku, Oahu, Hawaii, May 12-25, s005, pp. 302-304. Wen, Yu-hsin. Micro-Fabricated Cantilever Sensors for Brain Tissue Compliances Study. 2006. Yang, Gloria Y., Vasudev J. Bailey, Gisela Lin, William C. Tang, and Joyce H. Keyak. “Design of microfabricated strain gauge array to monitor bone deformation in vitro and in vivo.” Proc., IEEE 4th Symp. Bioinformatics Bioeng. (BIBE 2004), Taichung, Taiwan, May 19-21, 2004, pp. 30-37. Yang, Gloria Y, Vasudev J. Bailey, Yu-hsin Web, Giseela Lin, William C. Tang, Joyce H. Keyak. “Fabrication and characterization of microscale sensors for bone surface strain Measurement.” Proc., 3rd IEEE Int. Conf. Sensors, Vienna, Austria, Oct. 24 – 27, 2004, pp. 1355 – 1358. - 19 -