feature detection
advertisement

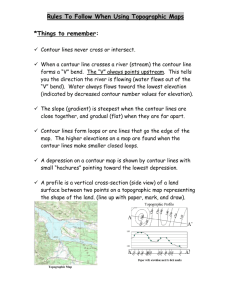
Feature detection and estimation: Differential geometric structures in Images Davi Geiger and Rosalba Giugno INTRODUCTION TO FEATURE DETECTION ~ ~ We have obtained image measurements such as D Iˆ( x, y, , s) , D I ( x, y, , s) , H ( x, y, s ) and D Iˆ( x, y, , , s) . We now wish to make detections and estimations, which are decisions based upon our models. Decisions are the result of some comparison followed by a choice. Examples (i) if a measurement is above a threshold we accept, not otherwise; (ii) if a measurement is the largest compared to others, we select it. In particular we will discuss edge detection, orientation, curvature, and junction detection and classification. 1. Edgels: edge detection, edge orientation (tangent) In order to detect an intensity edge we require that there is a value DIˆ( x, y, , s) in the set Iˆ( x, y ) above some threshold value, say T . In order to detect the orientation of a detected e edge element, at a given scale, we look for the angle that simultaneously maximizes the value DIˆ( x, y, / 2, s ) in magnitude and minimizes the value DIˆ( x, y, , s ) in magnitude. This is essence our model of extracting/detecting the orientation of a hypothesized contour present at a pixel (x,y). It requires a decision, and one possible criteria is to extract the orientation, at a given scale, via s max ( x, y) arg max ( | DIˆ( x, y, / 2, s) | | DIˆ( x, y, , s) | ) where only eight (8) directions are considered, and for locations where there is an angle such that ( | DIˆ( x, y, / 2, s) | | DIˆ( x, y, , s) | ) Te Figure 1 (right). Edgels Results of detecting and estimating s max ( x, y) . Dark levels represent 0 degrees orientation, while the brightest values represent 1 ~ Figure 2. Shows a step edge at The value | DI ( x, y, / 2, s ) | is (equally) large for both and as shown (in red) for scale s=3 pixels. It is also large for values not shownHowever, the quan- ~ ~ tity | DI ( x, y, / 2, s ) | | DI ( x, y, , s ) | is significantly larger for ~ Figure 3. Shows a step edge at The value | DI ( x, y, / 2, s ) | at “edge” locations is (equally) large for both and as shown (in red) for scale s=3 pixels. It is also (equally) large for values ~ ~ not shown)However, the quantity | DI ( x, y, / 2, s ) | | DI ( x, y, , s ) | is significantly larger for Figure 4. Shows a step edge at As the measurements are made away from the location of the edge, The quan- ~ ~ tity | DI ( x, y, / 2, s ) | | DI ( x, y, , s ) | decreases, and also spurious response are obtained, as in this case the response is equal for both and homogeneity measure will detect these locations. 2 We can further filter out spurious detections by removing locations where ~ H ( x, y, s) TH , and TH is a threshold to be estimated. We can define a routine called Edgel(x,y,s) which returns NIL if the location does not pass either the ˆ ˆ test ( | DI ( x, y, / 2, s) | | DI ( x, y, , s) | ) Te or the homogeneity test, and returns s ( x, y ) and | DIˆ( x, y, / 2, s ) | | DIˆ( x, y, , s ) | otherwise. max Pseudocode Edgel(x,y,s) D max 0 π 5π for θ 0, , ..., 6 6 DÎ ( | DÎ(x, y, θ π/2, s) | | DÎ(x, y, θ, s) | ) if (DÎ D max ) θ smax θ D max DÎ ~ if ( ( D max Te ) and ( H(x, y, s) TH ) ) return ( θ smax , D max ) else NIL end Note that s max ( x, y ) is selected among eight (8) directions from 2. Curvatures or changes of Edgel orientations We use the concept of the second derivatives D Iˆ( x, y, , , s) to construct a detector of angle changes (which is related to the curvature of a contour passing by pixel (x,y), as we will describe). Consider the quantity (change of angle) NIL s max ( x, y ) s s max ( x N , y N ) max ( x, y ) where if Edgel( x N , y N , s ) NIL otherwise , x N x x s max cos s max ( x, y), and y N y y s max sin s max ( x, y) and x and y will vary according to as x 1 and y 0 for 3 for x 0 and y 1 for x 2 and y 2 4 and y 2 for x 3 4 x 2 and y for 3 Note that the displacement length changes for different angles and for some angles such as the displacement is much larger in length as to reach a center of another pixel. The s ( x, y ) quantity can be best understood in figure 2. change in angle max s max ( x, y ) contour 2 ontour s max ( x x cos , y y sin ) y 2 s max ( x, y ) Figure 2. The geometrical quantity s max ( x, y) s max ( x, y) provides an estimation of how does the hypothetical contour x present in a pixel changes its tangent angle. It is proportional to the curvature of the contour. We can make the estimate symmetric by averaging over both sides of the pixel (x,y). More precisely, by considering s s max ( x, y) s max ( x x cos , y y sin ) max ( x x cos , y y sin ) , where s max ( x, y) . From s max ( x, y) we can readily compute the curvature of the hypothetical contour passing by pixel (x,y) as s max ( x, y ) where | ( x cos , y sin ) | (2 x cos 2 2 y sin 2 )1 / 2 . ( x, y, s) 4 3. Junctions and Corners For each pixel location we examine how well a simple junction model can fit the data. We ~ examine locations where large values of D I ( x, y, , s) occurs, i.e., where there is ~ D I ( x, y, , s) T for some and T is a threshold that needs to be estimated. We can further filter out spurious detections by removing locations where ~ H ( x, y, s) TH , and TH is a threshold to be estimated. Note that this filter also responds to edges, and so let us further filter out the junctions by characterizing them. Once a junction is detected one can also ~ compute the number n of directions such that D I ( x, y, , s) is above the threshold T. Thus, Corners or L-junctions will have n=2, T-junctions and L-Junctions will have n=3, Xjunctions will have n=4. More precisely, corners are expected to yield only two different an~ ~ gles, 1 and 2 , such that D I ( x, y,1 , s) T and D I ( x, y, 2 , s) T . Moreover we must require that min( 2 | 1 1 | , 2 2 ) 5 , 6 otherwise it is an edgel, not a corner. It is possible to detect T-junction or Y-junctions, where ~ there are three distinct angles with D I ( x, y, , s) T , i.e., there are three distinct regions 2 , 3 , 2 2 3 . In these cases the specific angles will define if it is a T- or Yjunction. T-junctions will have one while Y-junctions will not. T-junctions and Y- junctions usually characterize an occlusion, a surface on top of other surfaces. In this notation, corners are many times called L-junctions. X-junctions correspond to four angles detected such ~ that D I ( x, y, , s) T and they usually characterize a transparent surface intersecting other surfaces. ~ We next present a pseudocode for Junction detection and classification. The Input is Dθ I . 5 for Junctions Pseudocode ~ Junctions( Dθ I ) j=1 for y s …N-s for x s …N-s n(j)=0 ; list- θ( j) =NIL ; ~ if ( H(x, y, s) TH ) for i 1,2, ...,16 (loop for the sixteen different angles) ~ if ( | Dθ I (x, y, θ i , s) | Tθ ) n(j) n(j) 1 ; θn j θi ; add θ n j list- θ( j) ; (end loop for i) end if (n(j) 2) if (n(j) = 2) Δθ θ 2 j θ1 j ; (check it is corner not edgel) if ( MIN (Δ , 2 - Δ θ ) 5 6 ) continue ; x(j) x ; y(j) y ; j=j+1 ; (end loop for x) (end loop for y) end end return (j, x(j), y(j), n(j), list- θ( j) ) end Note that the final value of j carries the total number of junctions detected, while x(j), y(j) n(j) and list- θ( j) are arrays with entries for each junction. 4. Connecting Edgels Say we have detected edgels, and we wish to connect them to construct a contour representation. We are now moving from features represented at the pixel level to larger objects such as contours. Let us examine a simple recursive algorithm to link edgels. Say we start with an edgel located at (xc , yc) and with orientation of max(xc , yc). The idea of the algorithm is to examine the pixel neighbors defined by the orientation of the centered pixel and check if they are edgels, and if they are, link them and recursively apply the algorithm to the neighbors. So a pseudocode would be 6 Link-neighbors+(xc , yc ,max) xn+ = xc + xmax cosmax ; yn+ = yc + ymax sinmax ; if (Edgel(xn+ , yn+) NIL) Link((xc , yc), (xn+ , yn+)) Link-neighbors+( xn+ , yn+ ,max(xn+ , yn+) ) end Analogously we construct a routine that link neighbors in the other direction, more precisely Link-neighbors-(xc , yc ,max) xn- = xc - xmax cosmax ; yn- = yc - ymax sinmax ; if (Edgel(xn- , yn-) NIL) Link((xc , yc), (xn- , yn-)) Link-neighbors-( xn- , yn- ,max(xn- , yn-) ) End To apply a contour follower, it would have to select a seed to start. One possible approach is, given a seed we apply Contour-Follower(xc , yc) if (Edgel(xc , yc )) Link-neighbors+(xc , yc ,max) Link-neighbors-(xc , yc ,max) end One possible method of selecting such a seed is with the detection of junctions and following them. Here is how a contour follower could be designed ~ Contour-Follower( D I ) ~ Junctions( D I ) for i 1,2, ...,j for m 1,2, ...,n(j) if ( m i 5 6 ) Link-neighbors-(x(j) , y(j) ,m i) else Link-neighbors+(x(j) , y(j) ,m i) end (end loop for m) end (end loop for i) 7