mw_lidarcat
advertisement

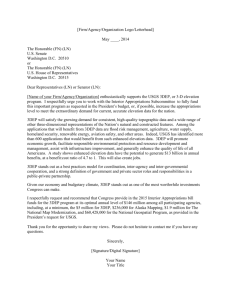
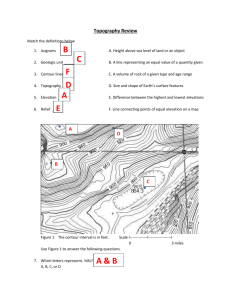
Short Catalog of MWISP Lidar Measurements Luc Bissonnette, Gilles Roy, Gilles Vallée, and Christian Bastille Defence Research Establishment Valcartier 2459 Pie-XI Blvd. North Val-Bélair, QC G3J 1X5 Canada POC: Luc Bissonnette Tel: 418-844-4000 Ext. 4437 FAX: 418-844-4511 Email: luc.bissonnette@drev.dnd.ca 1.0 Multiple-Field-of-View (MFOV) Lidar 1.1 Lidar Source: - Nd:YAG laser Wavelength: 1.06 micrometers Repetition frequency: 100Hz Pulse duration: 12 ns Beam diameter at transmitter: 25 mm Beam divergence: 0.5 mrad Polarization: linear 1.2 Receiver: - 200-mm diameter, 760-mm focal length, off-axis parabolic mirror The receiver field of view (FOV) is continuously scanned at the repetition frequency (100 Hz) of the laser source by means of an aluminized rotating glass disk at the periphery of which apertures of different sizes have been etched. The disk is placed in the image plane of the parabolic mirror so that each aperture defines a different FOV. Two disks were used. In the first case, the most frequently used configuration during MWISP, the disk has 32 circular apertures defining FOVs between 0.1 and 12 mrad full angle. Of these, only 16 are usable for cloud parameter retrieval, i.e. only 16 of them define FOVs greater than the beam divergence. The full sequence of all usable FOVs is completed in 32/100 s. In the second case, there are 4 identical groups of 8 annular FOVs ranging from 0.5 to 12 mrad. In this configuration, a full FOV sequence is completed in 8/100 s. 1.3 Scanner: Both the outgoing laser pulse and the received backscattered radiation pass through a 350 mm x 225 mm elliptical, 45-degree incidence plane mirror that can be rotated about a horizontal axis to allow scanning in the vertical plane perpendicular to the rotation axis. In the MWISP program, the laser beam was mechanically prevented to drop below 15 degrees at both ends. 1.4 Data Recording: The backscattered signal is split into its parallel and perpendicular polarization components with respect to the outgoing laser pulse, log-amplified to compress the dynamic range, and digitized (8-bit) at a selectable frequencies of 25, 50 or 100 MHz. The maximum achievable dynamic range is 4.5 decades or 32000. The digitization frequencies define range bins of 6, 3 and 1.5 m, respectively. The intrinsic lidar spatial resolution based on pulse length is 1.8 m. 1.5 Data Analysis: 1.5.1 Direct Backscatter: Lidar returns are proportional to the cloud or precipitation backscatter coefficient at the range position corresponding to the recorded time following the emission of the laser pulse. In turn, the backscatter coefficient is proportional to the droplet density. Hence, the raw backscatter results provide a qualitative picture of the cloud/precipitation structure. However, the signal strength is subjected to the inverse range squared dependence, and is attenuated by both scattering and absorption. Therefore, care must be exercised in interpreting the spatial and temporal maps constructed from the raw backscatter signals. 1.5.2 Depolarization: The ratio of the two polarization components of the received signal allows discrimination between the liquid, crystal and mixed phase of the cloud or precipitation. Large raindrops are aerodynamically squashed and give rise to depolarization but in a manner that, under most circumstances, can be easily differentiated from crystal depolarization. Hence, lidar depolarization gives temporal and spatial information on cloud phase and precipitation type. The lidar backscatter strength is heavily weighted by the small droplets because of their large number and their scattering efficiency at the operating wavelength of the lidar; this must be kept in mind in interpreting lidar depolarization in comparison with radar depolarization. Being a ratio, the depolarization values are not affected by range and extinction as long as the signal strength in either polarization component is above the noise level. 1.5.3 Liquid Water Content and Effective Droplet Diameter: The MFOV technique allows measurement of the FOV dependence of the multiple small angle forward scatterings induced by cloud and precipitation droplets or crystals. At the lidar operating wavelength, small angle forward scatterings are mostly the results of diffraction. From diffraction theory, we know that the angular width of the resulting forward scattering pattern is inversely proportional to the cross-section diameter of the scatterers. Thus, by properly modeling the scattering processes, we can retrieve from MFOV lidar measurements a good estimate of the effective droplet diameter defined as the ratio of the third to the second order moments of the size distribution. Combining the size information and the backscatter strength, and assuming a functional form for the size distribution (e.g. a modified gamma function for clouds), we can infer liquid water content (LWC). Both the LWC and the effective droplet diameter are derived as functions of radial range with the same range bin resolution as for the raw measurements. However, because of propagation effects, the diameter retrieval, and hence the LWC, is subject to averaging over a sliding axial length equal to one scattering mean free path. The lidar system and the retrieval method were designed for water droplet clouds. In the case of precipitation and ice crystal clouds, the MFOV method still returns values of droplet diameters and LWC. From preliminary analysis, these values appear reasonable but, at this stage of the analysis, we cannot determine their accuracy. There is probably a bias toward smaller raindrops or crystals, and in the case of ice crystals a totally different method of calculation of the equivalent LWC will have to be developed. 1.6 MWISP Lidar Measurements Three types of lidar measurements were performed in the MWISP program. Type 1 – Quick single-FOV elevation scans The FOV was set at a single intermediate value of 4 mrad and the elevation scanner was operated at a continuous constant speed of about 2 degrees/s. The scan plane was vertical and aligned in the azimuthal direction of the summit observatory, i.e. approximately 87 degrees from true north. The scan is from 16degree elevation looking east toward the summit to 15 degrees looking west. These scans provide a qualitative picture of the spatial structure of cloud base and precipitation, and give a good indication of their liquid, solid or mixed phase. A sample scan image showing a nearly uniform water cloud base on top of a lower ice cloud (or precipitation) that curls down the mountain slope is reproduced in Fig. 1. Type 2 – Step-by-step MFOV elevation scans These measurements were made at multiple FOVs for subsequent retrieval of droplet diameter and LWC. Since the FOV recordings are sequential, the scanner can not move during a least a complete set of FOVs. Therefore, the scanner was stopped at discrete elevation angles, and bursts of 1000 lidar shots were recorded at each scanner position. For most cases reported here, the scans were made from an elevation angle close to the vertical to 16 degrees looking east toward the summit, by steps of 2 degrees. Typically, it took 12 to 15 minutes to complete these scans. Since this is rather long, the step-by-step scans were performed only when conditions were sufficiently stable for the derived profiles to be representative of the spatial cloud and precipitation structure. An example of such measurements during a snow shower is shown in Fig. 2. The planned analysis in these cases is the retrieval of the elevation-range vertical profiles of LWC and effective droplet diameter up to the penetration depth of the lidar pulses. Type 3 – MFOV stare mode measurements The aim of these measurements is to derive the temporal evolution of the vertical profiles of LWC and effective droplet diameter in the clouds and precipitation above the Cog Railway Base site. For most of these measurements, the lidar was pointed vertically and bursts of 1000 MFOV lidar shots were fired at intervals of one minute for periods ranging from 10 to 60 minutes. An example of raw measurements is illustrated in Fig. 3. In a few cases, the elevation angle was set at 16 degrees looking toward the summit. However, the vertical direction was preferred because it allowed greater penetration depths through the cloud vertical structure. Figures 4 to 13 give the time lines delimiting each of these lidar measurement types for the 20 days of valid results. The lower line is for measurements of type 1, the middle line for measurements of type 3, and the upper line for measurements of type 2. The date is identified at the top of each graph and the time is given in UTC. Figure 1: Single FOV elevation scan recorded on 16 April 1999 at 23:54 UTC. Upper image is raw backscatter return; the color-coded scale is logarithmic but the units are arbitrary. Lower image is depolarization ratio; the scale is linear, white is 1% and black is 100%. The extended black regions in the depolarization image are not real but correspond to regions where signal strength has reached noise level. The radius grid size is 1500 m; scan is from 16 degrees looking east toward the summit to 15 degrees looking west. East is to the right and west to the left. The base of the water cloud is approximately at 2200 m above ground level. Figure 2: 1.03-mrad FOV image of step-by-step elevation scan recorded on 15 April 1999 from 16:10 UTC to 16:23 UTC. Upper and lower images and color code are as in Fig. 1. Total radius of pie shape display is 1350 m; scan is from 16 degrees looking east toward the summit to 72 degrees looking west. East is to the right and west to the left. The base of the water cloud is approximately at 500 m. The depolarization image shows nearly uniform snow below cloud base. Figure 3: 1.03-mrad FOV image of a 1-hour long stare mode measurement event recorded on 10 April 1999 between 17:59 UTC and 18:59 UTC. The lidar was pointed vertically. Vertical scale is range expressed in microseconds from 0 to 8 (1 microsecond = 150 m); horizontal scale is elapsed time in millihours, from 17980 to 18980. Upper image is raw backscatter return; the color-coded scale is logarithmic but the units are arbitrary. Lower image is depolarization ratio; the scale is linear, white is 1% and black is 100%. The palettes are the same as in Figs. 1 and 2. The extended black regions in the depolarization image are not real but correspond to regions where signal strength has reached noise level. The depolarization image indicates that precipitation is mixed rain and snow; at times rain is denser than snow (blue regions). The cloud base is very clearly delimited by the whitish band in depolarization image. 04-02-1999 MFOV stare mode 0.50 10 12 14 16 18 20 22 24 Time (UTC) 04-03-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 4 MFOV stare mode 20 MFOV elavation scan 22 24 04-04-1999 Single FOV elevation scan 10 12 14 16 18 MFOV stare mode 20 MFOV elevation scan 22 24 Time (UTC) 04-07-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 5 MFOV stare mode 20 MFOV elevation scan 22 24 04-08-1999 Single FOV elevation scan 10 12 14 18 16 MFOV elevation scan 20 MFOV elevation scan 22 24 Time (UTC) 04-10-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 6 MFOV stare mode 20 MFOV elevation scan 22 24 04-13-1999 Single FOV elevationscan 10 12 14 16 18 MFOV stare mode 20 MFOV elevation scan 22 24 Time (UTC) 04-14-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 7 MFOV stare mode 20 MFOV elevation scan 22 24 04-15-1999 Single FOV elevation scan 10 12 14 16 MFOV elevation scan 18 20 MFOV elevation scan 22 24 Time (UTC) 04-16-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 8 20 22 MFOV stare mode 24 26 04-17-1999 Single FOV elevation scan 10 12 14 16 18 20 MFOV stare mode 22 24 Time (UTC) 04-18-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 9 MFOV stare mode 20 MFOV elevation scan 22 24 04-19-1999 Single FOV elevation scan 10 12 14 16 18 20 MFOV stare mode 22 24 Time (UTC) 04-20-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 10 MFOV stare mode 20 MFOV elevation scan 22 24 04-21-1999 Single FOV elevation scan 10 12 14 16 18 20 MFOV stare mode 22 24 Time (UTC) 04-22-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 11 20 MFOV stare mode 22 24 04-24-1999 Single FOV elevation scan 10 12 14 16 18 20 MFOV stare mode 22 24 Time (UTC) 04-26-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 12 20 MFOV stare mode 22 24 04-27-1999 Single FOV elevation scan 10 12 14 16 18 20 MFOV stare mode 22 24 Time (UTC) 04-29-1999 Single FOV elevation scan 10 12 14 16 18 Time (UTC) Figure 13 20 MFOV stare mode 22 24