Chapter 2-0
advertisement

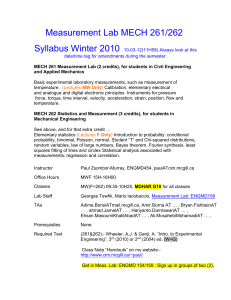
MECH 303 Chapter 2 2.2 Equation of Equilibrium in Plane Problems 0 x P xy yx y A x X D x xy Y B xy x x dx x dx C y yx y y y yx y dy dy Fig. 2.2.1 (1) Plane Stress x yx F 0 X 0 x x y y xy Y 0 F y 0 y x M 0 xy yx D (2) Plane Strain 2-2 MECH 303 Chapter 2 yx x X 0 y x xy y Y 0 x y z Z 0 Z 0 z 2-3 MECH 303 Chapter 2 2.3 Stress at a Point ---- Principal Stress x 0 y yx P A xy XN N x S N y B N YN Fig. 2.3.1 F F x y 0 X N dA x ldA yx mdA 0 YN dA y mdA xy ldA X N l x m yx YN m y l xy Normal stress N, shear stress N are: 2 2 N lYN mX N lm y x l m xy N lX N mYN l 2 x m 2 y 2lm xy i.e., the stress components x, y, xy at point P completely 2-4 MECH 303 Chapter 2 determines the stress states at this point (in any plane AB) Principle plane (xy=0), Principal stress X N l , X N l x m xy , m x l , xy YN m YN m y l xy on _ principal _ plane on _ any _ plane xy m l y (-x) (-y) = xy2 Two roots of : 1 x y x y 2 2 2 2 xy2 Let 1 be the angle between 1 and x axis, then 2-5 MECH 303 Chapter 2 tan 1 sin 1 cos90 1 m1 cos 1 cos 1 l1 tan 1 tan 2 1 x , xy 2 x xy tan 1 tan 2 1 1 2 Maximum and minimum stress at a point: Prove that maximum & minimum stress are 1 & 2 respectively, maximum & minimum shear stress are 1 2 2 respectively and acting on planes inclined at 45o with principal plane. 2-6 MECH 303 Chapter 2 2.4 Stress-strain relations (Physical equations, Constitutive equations, Hook’s law) Hook’s law in 3-dimensional form: (material property) , xy 1 xy G , yz 1 yz G , zx 1 zx G x 1 x y z E y 1 y x z E z 1 z x y E G E 21 , xy = xy (1) Plane Stress ( z=0, yz=xz=0 ) x 1 x y , E z E x y , y 1 y x , E xy 1 xy G yz = xz = 0. 2-7 MECH 303 Chapter 2 (x, y, xy) <==> (x, y, xy) (2) Plane Strain ( z=0, yz = xz=0 ) 1 2 z = (x+y), x E 1 2 y E x y , 1 y x , 1 xy 21 xy , E xz = yz = 0 (x, y, xy,) <==> (x, y, xy) (3) Plane stress equation Plane strain equation E If replace E by 1 2 by 1 ~ ~ If replace E by E 1 2 1 2 by 1 These two simple rules enable us to avoid the mathematical derivation of some equations required for 2-8 MECH 303 Chapter 2 the solution of a plane problem: by replacement of E and as stated above. 2.5 Geometric equations (Strain-displacement relation.) Rigid-body displacements 2-9 MECH 303 Chapter 2 Geometrical aspect of plane problem (suitable to any kinds of materials as far as they are continuous) Displacement components at any point (u=u(x,y); v=v(x,y)) (1) Relations between strains and displacements the normal strain of line PA, by definition, is x P' A'dx dx P' A' u v dx u dx u v dx v x x 2 2 u v dx dx dx x x 2 2 2 u v According to the basic assumption: x, , are small x x u v quantities, i.e.x<<1, <<1, x <<1, we have x 2-10 MECH 303 Chapter 2 x u x , similarly, y v u v xy , y y x (2) Rigid body displacement if u (x, y) and v (x, y) are given, then x, y ,x y are completely determined. If x, y, x y are given, the displacement u, v are not wholly determinate : rigid body displacement the non-zero displacements corresponding to zero strains: x u , x y v , y xy u v y x Let x y xy 0, then u 0, x v 0, y v u 0 x y 2-11 MECH 303 Chapter 2 u = f1(y) , v=f2(x) , df 1 y dy df 1 y df 2 x dy dx df 2 x , dx constan t constant ’s thus , we have : f1 y y u 0 , f 2 x x v0 u u 0 y , displacement v v0 x These components are the corresponding to y y x= x= x x 2-12 MECH 303 Chapter 2 x y xy 0 , and we can prove that u0 and v0 are the rigid body translation and the rigid body rotation. 2-13