First year report (without graphs)
advertisement
")
INDIVIDUAL-BASED MODELS OF
THE MOVEMENT OF COD
Helen J. Edwards
First Year Report
University of York
October 2003
Introduction
The Atlantic cod Gadus morhua is a commercially important demersal species of particular current
management concern (Righton & Metcalfe 2002). Overfishing (Pope & Macer 1996) has already devastated
some of the most extensive of the world’s cod stocks (e.g. northern cod stock, Hutchings 1996, Atkinson et al.
1997, Shelton & Lilly 2000), and it is feared that others may too be in an irreparable state (e.g. North Sea
stock, Hislop 1996, Cook 1998, O’Brien et al. 2000). Drastic quota cuts (e.g. North Sea, O’Brien et al. 2000)
and marine protected areas (Kenchington 1995, Shackell & Lien 1995, Bohnsack 1996) have already been
applied to help prevent further stock collapse, although additional conservation measures, requiring an
increased knowledge of cod behaviour, will be necessary to safeguard stock recovery (Turner et al. 2002).
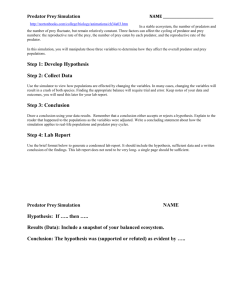
The life cycle of cod has several distinct stages (see Figure 1), individuals in each of these stages possessing
different physiological and behavioural characteristics. Cod are high-fecundity broadcast spawners (Jónsson
1982, Bergstad et al. 1987), and the number of eggs produced by an individual female is dependent upon its
size (Pitcher & Hart 1982, Kurlansky 1997). A female forty inches long, for example, can produce three
million eggs in a single spawning (Kurlansky 1997). Maturation may occur as early as two years or as late as
seven (Oosthuizen & Daan 1974), and spawning occurs in large aggregations on traditional areas or
“grounds” (Sund 1935, Rose, 1993, Brander 1994).
Adult
Egg
Larvae
Demersal juveniles
Pelagic juveniles
Figure 1: The life cycle of cod
1
The spatial distribution of cod varies both with age group, due to age-specific food and habitat requirements
(Tupper & Boutilier 1995, Hislop 1996, Anderson & Gregory 2000), and with the time of year as individuals
make seasonal migrations between nursery, spawning and feeding grounds (McKeown 1984). Whilst the
distribution of young cod is limited by the availability of suitable habitat to provide protection from predators
(Anderson & Gregory 2000), adults may migrate over large distances, and are thus capable of exploiting
seasonally variable environments. Spatial distribution patterns are also affected by patterns of exploitation
(Rijnsdorp & Pastoors 1995).
Studies investigating the diet of cod (Graham 1924, Rae 1967, Daan 1973, Cramer & Daan 1986, Bromley &
Kell 1993) indicate a wide variety of prey species eaten, from fish such as sandeels, haddock, herring and
flatfish, as well as other cod, to invertebrates such as shrimps, crabs, polychaetes and molluscs (Adlerstein &
Welleman 2000). Spatial and temporal changes in diet have been found to occur, and the prey species eaten
is dependent upon prey availability (Klemetsen 1982, Mattson 1990, Du Buit 1995, Høines & Bergstad 1999),
predator size (Werner 1972, Bromley 1995, Høines & Bergstad 1999) and upon the predators’ reproductive
status, both male and female cod having been found to suppress their feeding prior to and during most of
spawning (Fordham & Trippel 1999). Whilst it may be that feeding is entirely opportunistic (Rae 1967), it
could be that specific prey items are selected, either due to their size (Bromley 1995), nutritional value
(Buchman & Boerresen 1988, Bromley 1995) or to the low cost concerned with searching for and handling
them (Knutsen & Salvanes 1999). Brawn (1969) also showed that the tendency of wild cod to gather in
shoals might enable them to feed more effectively in a given area than a similar population of solitary
individuals.
Whilst foraging behaviour may have a major influence on cod movement patterns (Beverton & Lee 1965,
Rose & Leggett 1989, 1990, Arnold et al. 1994, Pitchford et al. 2003), the movement of cod may be
influenced by other environmental and ecological factors.
Temperature-related displacements of cod
concentrations have been reported both on small and large temporal and spatial scales (Lee 1952, Beverton &
Lee 1965, Woodhead & Woodhead 1965), temperature preferences appearing to be age-dependent (Nakken &
Raknes 1987, Swain & Kramer 1995). Water temperature has been linked to the growth of cod (Brander
2
1995, Michalsen et al. 1998), and if individuals are capable of selecting the habitat that maximizes the highest
growth rate, then preferred temperatures should decrease as food supply decreases (Elliot 1979, Crowder &
Magnuson 1983).
In general terms, the movements of migratory fish are related to those of the water currents. The eggs and
larvae of fish such as cod drift downstream with the residual current to the nursery grounds, and at a later
stage in the life history, adults must make a compensatory movement against the currents to spawn if the
population is to remain within the same hydrographic system (Arnold 1981). In tidally dominated waters,
individuals may use their interaction with the tides and water currents to reduce the energetic cost of
movement (Videler 1993) with the use of a mechanism known as selective tidal stream transport (Weihs
1978, Arnold & Cook 1984, Metcalfe et al. 1990, Arnold et al. 1994). Water currents and tides may also
provide possible directional clues for migrating fish (Arnold 1981, Arnold & Cook 1984).
An individual’s perception of the environment will undoubtedly have an effect upon its ability both to forage
and to navigate over large distances. Whilst several studies have looked at the way cod search for prey items
(e.g. Løkkeborg 1998, Løkkeborg & Ferno 1999), it may be that the mechanisms by which cod navigate over
short distances differ from those used over larger-scales (Robichaud & Rose 2002), and the cues and clues by
which cod migrate to oceanic spawning grounds are largely unknown. Aimed migration may occur when fish
perceive external stimuli that can be used for navigational purposes (Godø 1995), and it may also be that
individuals have the capacity to learn routes, either by making repeated migrations to the same grounds
(Ogden & Quinn 1984) or through the social transmission of routes within groups (Harden Jones 1968, Rose
1993).
Direct observations of fish behaviour at sea are both difficult and costly to undertake (Metcalfe & Arnold
1997, Godø & Michalsen 2000, Metcalfe et al. 2002). Whilst conventional, mark-recapture, tagging studies
(e.g. Bedford 1966, Daan 1978, Templeman 1979, Bagge et al. 1994, Hunt et al. 1999, Godø & Michalsen
2000) may provide information on the growth rates, distribution, abundance and migration patterns of cod
populations, these studies only provide information on cod behaviour at two points in time. The development
3
of electronic tags, capable of emitting radio or acoustic signals has enabled the continuous study of cod
behaviour (Clark & Green 1990, Arnold et al. 1994, Løkkeborg 1998, Green & Wroblewski 2000,
Wroblewski et al. 2000). The cost of such studies, however, has generally resulted in their being of limited
duration (Arnold et al. 1994, Metcalfe et al. 2002), despite the need for studies of behaviour over longer timescales for investigating migration mechanisms, spawning patterns and feeding behaviour and for assisting
with the development of fisheries management models (Righton & Metcalfe 2002).
Electronic data storage tags, or DSTs (Metcalfe & Arnold 1997, Righton & Metcalfe 2002, Turner et al.
2002), record and store environmental and behavioural data (Metcalfe et al. 2002), measuring variables such
as depth from pressure, light intensity and water temperature at specified time intervals. DSTs “provide a
means to observe behaviour under natural conditions over long periods (Metcalfe & Arnold 1997, Metcalfe et
al. 1998, Godø & Michalsen 2000, Righton et al. 2001) without the difficulties associated with sea-going
field work” (Righton et al. in prep). The simultaneous release and subsequent study of large numbers of
individuals has greatly increased the available information on cod behaviour, and permits the study of
population-level processes (Metcalfe & Arnold 1997).
Figure 2: An internally implanted data storage tag
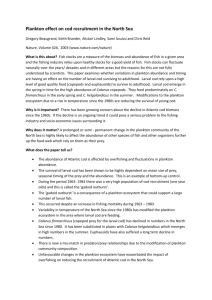
With the data recorded by DSTs it is possible to reconstruct not only each individual’s vertical movement in
the water column, using pressure as a measure of depth, but also its horizontal movement. Whilst the location
4
of an individual can only be determined for certain at the times of release and recapture (Righton et al. in
prep), the Tidal Location Method, or TLM, (Metcalfe & Arnold 1997) may be used to enable the geographical
construction of movements. The TLM uses hydrostatic data in the form of times of high and low water and
tidal range derived from pressure measurements to determine the geographic position of each individual
whenever they remain stationary on the sea bed for a full tidal cycle or more (Metcalfe & Arnold 1997).
Temperature data recorded by DSTs may also be compared with synoptic charts of sea surface temperature to
provide further information on geographic location (Metcalfe & Arnold 1997).
Recent data storage tag observations of cod indicate pronounced regional and temporal differences in
migratory and foraging behaviour (Righton et al. 2001, Righton & Metcalfe 2002), individuals in the Irish Sea
appearing to be a lot more active than those in the North Sea. Whilst Irish Sea cod were found to be
extremely active at all times, those in the North Sea showed a reduction in movement in June to July, with
fish in August and September only becoming active at night (Righton et al. 2001, Righton & Metcalfe 2002).
Variations in the behaviour of cod of different stocks have been documented before (Righton & Metcalfe
2002), as have seasonal variations in cod behaviour (Godø & Michalsen 2000), and the investigating of these,
possibly complex (Righton et al. 2001), interactions between cod and the environment may be key to
understanding both foraging and migratory behaviour.
5
1°0'0"W
0°0'0"E
1°0'0"E
2°0'0"E
3°0'0"E
4°0'0"E
55°0'0"N
55°0'0"N
54°0'0"N
54°0'0"N
53°0'0"N
53°0'0"N
52°0'0"N
52°0'0"N
1°0'0"W
0°0'0"E
1°0'0"E
2°0'0"E
3°0'0"E
4°0'0"E
Figure 3: Map showing the reconstructed horizontal movements (using the tidal location method) of
three cod tagged off Lowestoft in March 1999.
Aims
To predict the relationship between the movement of cod and key environmental and ecological factors,
and to therefore improve our understanding of why cod in different environments have adapted specific
behavioural strategies.
To use this knowledge to help understand the response of cod stocks to different patterns of exploitation.
6
Predator-prey Models
Horizontal migrations involve complex interactions between individuals and the environment, which are
generally not well understood (Huse et al. 2002). It has been proposed that differences in the level of activity
such as those observed between North and Irish Sea cod could be behavioural responses to variations in the
distribution and abundance of prey species (Godø and Michalsen 2000, Righton et al. 2001). To investigate
this hypothesis, and to begin to explore the mechanisms controlling the movement of cod, a number of twospecies predator-prey models have been constructed. Whilst the predator could be directly compared with the
species Atlantic cod, the prey species is given relatively simple dynamics and may be comparable with a
number of species upon which cod feed.
Throughout this section, the two-dimensional physically homogeneous environment is modelled as a discrete
lattice of N square ‘cells’. In contrast with those models in which a maximum of one individual of each
species occupies each cell in the grid (e.g. de Roos et al. 1991, Durrett & Levin 1994, Ellner et al. 1998,
Keymer et al. 1998), each cell shall be thought of as comparable with a colony or subpopulation of
individuals (Renshaw 1991, Travis & Dytham 1998).
Deterministic Models
Within each cell the two species undergo reproduction and mortality, both of which depend only upon the
number of individuals supported by that cell, and thus within each cell the two species undergo the same nonspatial Lotka-Volterra predator-prey process. Treating predators and prey as continuous variables, prey grow
exponentially at a rate r1 in the absence of predators, whilst predators are dependent upon the prey species for
survival. The ‘within-cell’ dynamics may then be described by
dX i
X i (r1 b1Yi ),
dt
dYi
Yi ( r2 b2 X i ),
dt
(1)
where Xi(t) and Yi(t) denote the number of prey and predator individuals respectively in cell i at time t for i =
1, …, N. These equations may be combined to form a single equation and integrated to obtain
7
r2 ln( X i ) b2 X i r1 ln(Yi ) bY
1 i c,
(2)
(see Renshaw 1991 for details).
This expression represents a family of closed curves, each determined by their initial position (Xi(0),Yi(0)).
Five such curves, with parameter values taken from Renshaw (1991) and initial values Yi(0) = 15 and Xi(0) =
1, 5, 10, 15 and 20 are shown in Figure 4. These parameter values give an equilibrium point of (Xi*, Yi*) =
(25, 15), and any trajectory follows a closed path in an anticlockwise direction indefinitely, there being
neither damping towards this equilibrium point nor any outward drift towards the axes (Renshaw 1991).
Figure 4: Closed phase plane trajectories for the Lotka Volterra process in (1),
with r1 = 1.5, r2 = 0.25, b1 = 0.1 and b2 = 0.01.
The time series corresponding to a typical periodic orbit (depicted in Figure 5) shows the familiar predatorprey cycles in the two populations, the prey cycle ‘leading’ the predator cycle.
Figure 5: Time series corresponding to a typical periodic orbit
The solutions to these equations are not structurally stable (Murray 2002), so that any small perturbation to
either the prey or predator numbers will move the solution onto another trajectory which does not lie
everywhere close to the original one.
The deterministic model for the entire lattice of subpopulations is constructed by combining within-cell
interactions with movement between cells, the term ‘movement’ being used to describe the event in which a
single individual moves from one cell to another, movement within cells being disregarded. No delay is
modelled between the time at which an individual departs a cell and that when it arrives at its destination,
movement being effective immediately under the assumption that there is no great distance between cells.
Denoting the rates of movement ui,j and vi,j per individual prey and predator respectively, from cell i to cell j,
8
and combining these with the equations in (1) gives 2N deterministic equations (i = 1, 2, … N) describing the
spatial process
dX i
X i (r1 b1Yi ) X i (ui1 ... uiN ) ( X 1u1i ... X N u Ni ),
dt
dYi
Yi (r2 b2 X i ) Yi (vi1 ... viN ) (Y1v1i ... YN vNi ).
dt
(3)
Stochastic Simulations
To incorporate the effects of demographic stochasticity, the Lotka-Volterra model is reformulated as an
individual-based model (IBM) in which the birth, death and movement of individuals are stochastic processes.
The model is individual-based in that individuals are the fundamental modelling unit, but not in the sense
described by Grimm (1999), since individuals possess only the unique attribute that is their spatial position,
and no other.
The model is simulated as a Monte Carlo process, in which events occur at random, but with underlying rates
specified by the deterministic model (3). Simulations are based on the following transition probabilities
describing the birth, death and movement of individuals
P[ X i (t h) X i (t ) 1] r1 X i (t )h,
P[ X i (t h) X i (t ) 1] b1 X i (t )Yi (t )h,
P[Yi (t h) Yi (t ) 1] b2 X i (t )Yi (t )h,
P[Yi (t h) Yi (t ) 1] r2Yi (t )h,
P[ X i (t h) X i (t ) 1 and
(4)
X j (t h) X j (t ) 1] ui , j X i (t )h,
P[Yi (t h) Yi (t ) 1 and Y j (t h) Y j (t ) 1] vi , jYi (t )h,
for small h and i, j = 1, …, N, where Xi(t) and Yi(t) now represent the stochastic number of prey and predators
in cell i at time t. The overall transition rate for the stochastic process may now be defined as
9
N
N
R(t ) X i (t ) r1 b1Yi (t ) ui , j
i 1
j 1
N
Yi (t ) r2 b2 X i (t ) vi , j .
j 1
(5)
Ecological systems are by their very nature concurrent (Palmer 1992), and this concurrency may have a
significant impact on the outcome of simulations (Topping et al. 1999). There is no place for explicit
ordering of mortality, reproduction and movement rules in this model, however, since ordering is determined
by the actual occurrence of particular events. At each time instant at most one event takes place (with
probability one), and thus no ‘collision rules’ are required (Berec 2002). Time intervals S between the
occurrence of successive events are independently and identically exponentially distributed random variables
P[ S s] exp{ R(t ) s},
(6)
and to simulate a value S = s, this can be set equal to a uniform pseudo-random number 0≤Z2≤1,
Z 2 exp{ R(t )s},
(7)
which upon taking logarithms of both sides gives simulated inter-event times
s [ln(Z 2 )]/ R(t ),
(8)
(Renshaw 1991). At each time step, the simulation program needs only to determine the appropriate event,
and to then update the populations of those cells of the lattice affected by this event. It proceeds as follows
i)
Distribute individuals of the two species across the lattice.
ii)
Generate two uniform pseudo-random numbers 0≤Z1,Z2≤1.
iii)
Compute the rates r1X1(t), b1X1(t)Y1(t) and so on (from equations (4)) over i, j = 1, …, N and
accumulate these step-by-step in a term called SUM. At each step, compare Z1 with SUM/R(t),
the appropriate event to occur at this step being determined when SUM/R(t) ≥ Z1 for the first
time.
iv)
Update the populations of the cells affected by the last event, and increase t by s = [ln(Z2)] / R(t).
v)
Return to step ii).
10
The stochastic simulation model described above may be used as a starting point for the construction of a
number of different predator-prey models. Beginning with the simplest case of a non-spatial model, it is
possible to progressively increase model complexity, both to make the models more ‘realistic’ and more
representative of the species being studied.
11
Results
1] Non-spatial predator-prey process (immobile individuals in a single cell)
Considering stochastic simulations of the non-spatial process, or the equivalent of the lattice being composed
of a single cell, it is possible to compare the results obtained with those from the deterministic non-spatial
model in (1). With values for the birth and death rates as before, two simulations of the process are shown in
Number of predators
Figure 6.
100
90
80
70
60
50
40
30
20
10
0
0
100
200
300
400
500
600
Number of prey
Figure 6: Stochastic simulations in a single cell with initial values (8,4) and (25,15)
In both simulations, the prey population in the cell becomes extinct before completing even one cycle. From
inspection of the deterministic curves in Figure 4 it can be seen that following each peak in the predator
population density, the prey numbers become dangerously close to zero. These extinctions of the prey
population in the stochastic simulations might therefore be expected, since it would take very few ‘death
events’ for this to occur.
12
2] ‘Global’ random movement
An investigation of the effect that introducing the movement of individuals has upon the dynamics of the
system requires a more thorough description of the habitat, as well as a set of probabilities with which
movement events occur. Whilst the assumption of an infinite habitat simplifies the derivation of many
mathematical results (Durrett & Levin 1994), computer simulations require finite habitats.
A lattice of one hundred square cells is used, with initial populations of 2500 prey and 1500 predators
distributed uniformly randomly across the grid. Beginning with a spatially implicit model in which uij = vij =
u = v for all i, j, in other words giving all individuals of each species an equal probability of moving to any
other cell in the grid, which from hereon shall be termed ‘global movement’, an example of the time series of
the two populations (summed over the entire grid) is shown in Figure 7.
Figure 7: Time series from a stochastic simulation of the (global) spatial process
Unlike in the non-spatial simulations, the addition of only a little (global) movement to the system allows the
populations to complete many predator-prey cycles before the prey population becomes extinct. As described
earlier, the local population dynamics are unstable, and whilst this movement is enough to allow the
possibility of cells becoming effectively ‘recolonised’ once their populations have died out, it is not enough to
allow the populations to persist indefinitely. Instead, the predator-prey cycles gradually increase in amplitude
until the two populations become extinct.
Figure 8: Phase plane corresponding to the time series in Figure 7
Any small perturbation in either of the (total) populations causes the solution to move onto a new periodic
orbit, resulting in a spiralling outward effect, away from the non-trivial equilibrium (see Figure 8). Varying
the rate at which individuals move has no effect upon the dynamics of the system and the two populations are
never able to persist under these movement rules.
13
CASE 3: ‘Local’ random movement
The range over which spatial interactions take place is closely linked to both the size of the lattice, or number
of grid cells, and to the size of each grid cell modelled. Since grid cells are assigned no size, or capacity for
the number of individuals they may support, an investigation of how varying the distance individuals are
capable of moving affects the dynamics and distribution of the two populations is required. A spatially
explicit model shall now be developed, in which individuals have the ability only to interact with those
individuals in a certain number of neighbouring cells.
For simplicity, the interaction neighbourhood, or “area about the individual circumscribing a part of the
habitat that influences its current behaviour” (Berec 2002) shall be of von Neumann type (von Neumann
1966), individuals moving only to one of four neighbouring grid cells in a single time step. Movement is
local and diffusive, individuals moving equiprobably in all directions.
To ensure that each individual has a complete interaction neighbourhood, periodic boundary conditions are
employed. Technically, each individual leaving the habitat reappears elsewhere in the grid, although this may
be thought of as a different individual with the same characteristics. There is therefore no reduction in
population size resulting from the movement of individuals, the total population numbers only being affected
by the events of reproduction and mortality.
Figure 9: Time series from a stochastic simulation of the spatial process
with ‘local’ interactions
The simulations with this form of ‘local’ movement again allow the populations to complete a number of
predator-prey cycles. In fact, unlike under ‘global’ movement, the amplitude of the cycles remains relatively
constant (Figure 9), and the two populations show no indication of becoming extinct. Upon examination of
the phase plane in Figure 10 corresponding to this time series, it is clear that there is no longer any ‘spiralling
14
outward’ effect as resulted under ‘global’ movement, and even large perturbations such as the one in the prey
population indicated by the orange arrow are not able to force the solution onto a new trajectory.
Figure 10: Phase plane corresponding to the time series in Figure 9
CASE 4: Cod with two distinct behavioural strategies
An investigation of the benefits of active movement as opposed to a ‘sit and wait’ strategy may be of use in
studying the reasons why some cod behave differently to others (e.g. Righton et al. 2001). The easiest way to
execute this is to divide the cod population in each cell, previously known as Yi , into two sub-populations,
each interacting with the prey species in the same way, but each with a different behavioural strategy.
Beginning with the case in which the prey and one (sub)population of predators are capable of global
movement, whilst the other (sub)population is incapable of any movement between grid cells, this could be
comparable with the behaviour of cod in July, in which those individuals in the North Sea remain stationary
upon the sea floor whilst those in the Irish Sea are still highly active in their search for food. The time series
in Figure 11 shows that it is advantageous to be a moving predator. Upon extinction of the stationary predator
population, the other two populations cycle with increasing amplitude as in the earlier simulations of global
movement. Therefore, whilst the two predator populations ultimately become extinct, the moving predators
are able to survive for a substantially greater period of time.
Figure 11: Time series with prey and predator 1 capable of ‘global’ movement and predator 2
incapable of any movement between grid cells
Again comparing stationary cod with individuals capable of movement, but this time allowing the moving cod
and prey only to move to one of their four neighbouring grid cells, it may be seen from Figure 12 that the
stationary cod population again becomes extinct, whilst the moving cod and prey populations both cycle
indefinitely.
15
Figure 12: Time series with prey and predator 1 capable of ‘local’ movement and predator 2 incapable
of any movement between grid cells
The results from comparing stationary cod with those capable of both ‘global’ and ‘local’ movement suggest
that in these simple models it is always advantageous for a cod to move, but the way in which individuals
move is vitally important. Moving only short distances allows populations to persist indefinitely, whereas
under ‘global’ movement, populations cycle with increasing amplitude until they become extinct.
16
Discussion
The use of tagging data to increase our understanding of fish behaviour has often consisted of only simple
statistical analyses (e.g. Hilborn 1990, Schweigert & Schwarz 1993, Anganuzzi et al. 1994), and whilst some
models have been developed to investigate behaviour itself, those studying fish movements have often
focused on the direction, distance and timing of movements directly implied from the analysis and
interpolation of data (e.g. Rijnsdorp & Pastoors 1995). There is thus a general need for more theoretical, or
‘behaviourally-driven’ models that focus on the mechanisms of movement to complement such ‘data-driven’
models and to aid the management of species in regions from which no data have been collected.
The Lotka-Volterra predator-prey equations have been the focus of a multitude of studies, and yet despite
their simplicity, only a fraction of these are spatially explicit. Whilst the models described here are simplistic
by nature, they show some interesting results regarding the temporal evolution of two interacting populations
under different behavioural movement rules. Spatial heterogeneities created by individuals moving only
within a local neighbourhood can allow populations of predators and prey to persist, and yet the ‘mixing’
produced under ‘global’ movement results in the ultimate extinction of the two populations.
Since these results indicate that it is best to move only short distances, an investigation of movement within
different interaction neighbourhoods may enable us to ascertain just how far individuals may move before
populations fail to persist. To capture better an idea of a circular neighbourhood, the grid could be modelled
as composed of regular hexagons rather than squares, or, as an extension to the von Neumann neighbourhood,
movement to the four cells at diagonals to the departure cell could be included.
The models described give predator and prey individuals the same capabilities, which is unlikely to be
realistic. For example, prey may be more limited in terms of their abilities to move large distances, and thus
there is a need to extend these models to look at different combinations of movement strategies. This will
enable an investigation of whether or not it is always best for a predator to move only short distances in these
simple models.
17
Each of the models described make the assumption that individuals are essentially identical with regard to
their modelled properties. In reality, no two individuals are the same; they differ in age, size, sex, stage and
many other physiological and behavioural traits (Berec 2002). The next step in the modelling process will
thus be to take this uniqueness of individuals into account and to determine whether or not the incorporation
of individual variability can reveal qualitatively different information about the system than that obtained with
population-based models. The use of an individual-based modelling approach (Huston et al. 1988, DeAngelis
et al. 1994, Grimm 1999) allows the properties of the populations to be derived from those of their constituent
individuals and the relations between them (Lomnicki 1992, Huse et al. 2002), thus permitting an
investigation of the role of the individual in determining population (or stock) behaviour, dynamics and
distribution.
Individual-based models (IBMs) keep track of every individual in the population, individuals being
characterised by attributes such as age, length and weight, as well as by their spatial position. Individuals
may also be given adaptive traits such as life history and behavioural strategies (Huse et al. 1999, Huse et al.
2002) and the ability to develop more ‘successful’ strategies, either through within-lifetime ‘learning’ (Ackley
& Littman 1991) or through simulated ‘evolution’ (Huse & Giske 1998).
Individual-based models have been most extensively applied to the study of fish (Grimm 1999), and whilst
the majority of these models have been constructed to explore variability in recruitment (Rose & Cowan
1993) and the early life stages (Bartsch et al. 1989, Hinckley et al. 1996, Hermann et al. 2001), others have
focused on species interactions (Clark & Rose 1997, Shin & Cury 2001), the effects of human activity on
growth and survival (Van Winkle et al. 1998, Scheibe & Richmond 2002), and more recently, on the
movement of fish (Dagorn et al. 1995, 1997, Fiksen et al. 1995, Romey 1996, Huse & Giske 1998, Railsback
et al. 1999a,b Kirby et al. 2000). IBMs have the potential to simulate key processes such as growth,
movement, reproduction and recruitment. There is a need, however, to balance any possible improvements in
‘realism’ with the complexities associated with model formulation, simulation and analysis (Berec 2002).
18
Future Work
The effects of within-cell interactions on population persistence and distribution shall be explored by
replacing the Lotka-Volterra predator-prey process with a non-linear alternative, for example, by allowing the
prey species to develop under a Ricker type model (see Pitcher & Hart 1982), or with the introduction of a
carrying capacity or alternative predator functional responses. The spatial distribution of the prey species
could be varied, and prey could be thought of as patchy, as in Pitchford & Brindley (2001), with different
movement rules for cod being applied within and outside patches.
An important question in any modelling effort is that of scales (Berec 2002), and a number of models could
be developed at different spatial and temporal scales to investigate different questions about individual
behaviour and population dynamics and distribution.
Modelling on large spatial scales will allow
investigation of the effects of different management strategies, of the processes driving substock separation,
and a comparison of behaviour in different ecosystems, whilst spatial models at a smaller scale will allow
more detailed investigation of foraging behaviour and interactions between individuals.
The temporal scale of IBMs is also of considerable importance. At one extreme, the evolution of behavioural
strategies will be modelled (e.g. Travis & Dytham 1998), allowing individuals to evolve their own strategies
either by learning within their lifetime or by passing on information to their descendants. It will then be
possible to investigate whether all individuals evolve the same ‘best’ strategy, or if different strategies are
able to co-exist. At the other extreme, models could focus on within-lifetime behaviour, for example to look
at the short-term foraging movements of adult cod.
As in the majority of IBMs, behavioural rules and movement strategies could be made dependent upon
various individual characteristics, so that the same local environment may have a different effect on each
individual. For example, older or larger individuals might be considered to be capable of moving greater
distances than smaller individuals of the same species. Also, whilst the movement of fish eggs and larvae
may be random or determined by tides, wind direction and turbulence, adults and older individuals may be
capable of exploring their surroundings and of making informed decisions, based either upon information they
19
obtain through searching or upon their memory, thus producing directed movements. By giving individuals
attributes it will therefore be possible to compare random movement with more ‘intelligent’ behaviour.
The representation of the environment is an integral part of individual-based modelling (Bian 2003), and to
make models both more ‘realistic’, and to investigate the relationship between cod movement and various
environmental characteristics and processes, the explicit representation of a heterogeneous environment is
required. Many features of the environment could be represented such as tidal and ocean circulation patterns,
temperature fields and topographic heterogeneity, and other species with which cod interact could be
modelled.
Spatial heterogeneity in physical characteristics is easily modelled in discrete-space by defining a variable and
giving each grid cell a value of its state. Alternatively, future models could be simulated in continuous space,
and it may therefore be necessary either to use a Geographic Information System (GIS) model as a
background description of the environment (Berec 2002), or to superimpose individuals in continuous space
onto a lattice containing environmental data. Simulating models in continuous space will also require the
replacement of the underlying Lotka-Volterra predator-prey equations with rules describing how predators
search for, encounter and handle a prey item.
Acknowledgements
This research is funded by a NERC studentship with CASE partner CEFAS. I would like to thank my
supervisors Calvin Dytham, Jon Pitchford and Dave Righton for their support and patience, and CEFAS for
supplying Figures 2 and 3.
Number of Words: 4993.
20