jgrb16417-sup-0001-readme
advertisement

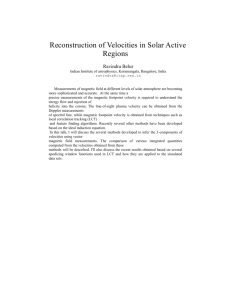
Auxiliary Material for Paper 2009JB007021 C. E. Acton and K. Priestley Bullard Laboratories, University of Cambridge, Cambridge, United Kingdom. V. K. Gaur Indian Institute of Astrophysics, Bangalore, India. S.S. Rai National Geophysical Research Institute, Hyderabad, India. Complete citation: Acton, C. E., K. Priestley, V. K. Gaur, and S. S. Rai, (2010), Group velocity tomography of the Indo-Eurasian collision zone, J. Geophys. Res., 115, B12335, doi:10.1029/2009JB007021. Introduction The auxiliary file contains seven figures giving additional details of the surface wave analyses. Figure S1 gives an example of data processing and group velocity dispersion measurement. Figure S2 shows the effect of varying the a priori smoothness parameter in the tomographic inversion for the group velocity dispersion maps. The checkerboard resolution tests for Rayleigh waves are shown in the paper. Here we include additional resolution tests. Figure S3 shows the Love wave checkerboard tests and Figure S4 gives the Rayleigh wave synthetic plate tests which illustrates how well isolated features are resolved in different parts of the region. Figure S5 shows the results of a correlation tests between group velocity dispersion data derived from CRUST2.0/AK135 and this study. Figure S6 shows the results of a correlation tests between Ritzwoller and Levshin [1998] Rayleigh wave group velocities and the Rayleigh wave group velocities determined in this study. Figure S7 shows a depth resolution tests for inversion of group velocity dispersion for shear velocity. A detailed description for each figure is given in the accompanying caption. 2009jb007021-fs01.pdf Figure S1. Group velocity dispersion curves were calculated for individual sourcereceiver paths using the multiple filter taper analysis (MFT) of Herrmann and Ammon [2004]. In this procedure the data are filtered by a set of narrowband Gaussian filters centered at discrete frequencies and a group velocity-period map is constructed from the arrival times of the maximum amplitudes at the center frequency of each filter. (a) Vertical component seismograms for a magnitude 5.6 event recorded at Hyderabad from a distance of 2177 km. The top trace shows the raw vertical component prior to removal of the instrument response, followed by the filtered and decimated vertical component, the isolated fundamental mode after phase match filtering and the residual after removal of the fundamental mode. The fundamental mode Rayleigh wave is picked out in red. (b) The corresponding group-velocity diagram as displayed by the MFT graphical interface, colored and contoured according to the amplitude of the seismogram at different frequencies. The fundamental mode can be picked out along a ridge in the contours. Dispersion is measured on the displacement trace. 2009jb007021-fs02.pdf Figure S2. Effect of varying the a priori smoothness parameter (apsl) which is a limit on the standard deviation of the slowness across a 10° reference distance. (a)–(c) show 10 s Rayleigh wave group velocity maps for a range of values of apsl with a corresponding map of the estimated error from the tomography, (d)–(f), plotted below each one. The scale for group velocities shown in (a)–(c) is given by (g), and (h) plots the relationship between apsl and the sum of the squares of the residual fits between observed and synthetic travel times. The red diamond marks the chosen value of apsl for 10 s period which can be seen to lie on the corner of the curve although the precise value is chosen subjectively with regard to the physical reasonableness of the results, the correspondence to known features and the presence of artifacts such as streaking and speckling. 2009jb007021-fs03.pdf Figure S3. Checkerboard tests for 20 s Love wave group velocity maps with cells of three different sizes: (a) 5°, (b) 7.5°, (c) 10°. The corresponding recovery maps produced by inverting synthetic travel times through the checkerboard model for the same paths as those used in the tomographic inversion of real data are shown below. The recovered velocities suffer from the poorer path coverage of the Love wave dataset compared to the Rayleigh wave dataset and a 5° checkerboard pattern is not well resolved except for the regions of highest path density in the northeastern Himalaya, southeastern Tibet and Iran. However 7.5° cells are reasonably well recovered across continental regions with some smearing across the Indian Shield and 10° cells are very well recovered throughout the region except for the Arabian Sea. 2009jb007021-fs04.pdf Figure S4. Plate tests for the 20 s Rayleigh wave group velocity map with a 3° low velocity square cell positioned over (a) the northeastern Himalaya, (b) the north central Indian Shield and (c) the east Indian coast next to the Bay of Bengal. These tests have been performed to address the limitations of standard checkerboard tests in testing for directional bias in the recovery of velocities or the production of velocity anomalies in the tomographic inversion as neighboring cells can obscure the effects. Each cell has a velocity of 2.5 km s-1 within a 4.0 km -1 homogeneous background. The method used is in every other way identical to the checkerboard tests included in the main body of the paper. The corresponding recovery maps produced by inverting synthetic travel times through the velocity model for the same paths as those used in the tomographic inversion of real data are shown directly below, (d)–(f). In all cases a 3° cell can clearly be resolved with limited smearing. Amplitude recovery is best in d) where 99% of the velocity is recovered in the center of the cell and slightly poorer in e) and f) where recovered amplitudes are 10% to 15% too high in the center of each cell. 2009jb007021-fs05.pdf Figure S5. Correlation tests between group velocity dispersion data derived from CRUST2.0/AK135 and this study. Group velocities were calculated from the CRUST2.0/AK135 model by extracting the shear velocity structure at points on a 2° grid within a 20° spherical cap, centered on 22.5° N, 77.5° E, and creating synthetic dispersion curves. Results for periods 10, 15, 20, 30, 50 and 70 s are plotted with group velocities from this study on the x axis. A linear regression line is plotted in red, with the gradient written above each plot. The Pearson's correlation coefficient, r, for the dataset is also noted. Pearson’s correlation coefficient, r, ranges from +1, signifying a perfect positive linear relationship, -1, signifying a perfect negative linear relationship. At shorter periods, there is a great deal of scatter in the data. The majority of this scatter comes from large errors in our measurements of group velocities across the Indian Ocean at 10 and 15 s due to poor path coverage at these periods. A subset of the data, containing only continental measurements and defined by a 10° radius spherical cap centered on 30° N, 77.5° E, is plotted for periods 10 and 15 s. This subset is used to calculate the linear regression line and Pearson's r, but the remainder of the dataset is plotted as pale gray crosses. Measurements plotted within the blue-dashed lines are all oceanic. It is clear that if oceanic measurements are excluded there is a better correlation between CRUST2.0/AK135 and our results at short periods, and that our values of group velocity are too high in the oceans at 10 and 15 s. Remaining scatter at short periods is likely due to the underestimation by CRUST2.0/AK135 of sediment thicknesses in areas such as the Tarim Basin and overestimation of upper crustal velocities in Tibet (Figure 6). At long periods there is good correlation between group velocities predicted by CRUST2.0/AK135 and our measurements, CRUST2.0/AK135 gives consistently higher group velocities, resulting in a decrease in the gradient of the linear regression line as period increases. This is partly due to the fact that CRUST2.0/AK135 overestimates average crustal velocities in tectonically active areas such as Tibet and underestimates crustal thicknesses beneath the plateau. It must also be true that AK135 mantle velocities are too high for this region. 2009jb007021-fs06.pdf Figure S6. Correlation tests between Ritzwoller and Levshin [1998] Rayleigh wave group velocities and this study. Group velocities are sampled from both maps for a number of periods (20, 25, 30, 40, 50 and 70s) every 2° for a 20° spherical cap centered on 22.5° N, 77.5° E and plotted with results from this study on the x axis. A linear regression line is plotted in red, with the gradient written above each plot. The value of Pearson's r for the data set is also noted. 2009jb007021-fs07.pdf Figure S7. Resolution tests for a) a cylindrical low velocity zone of radius 500 km centered on 32.5° E, 85° N and with velocities perturbed by 15% between 0 and 70 km depth relative to a smoothed reference model based on AK135 and b) a cylindrical low velocity zone at depth, centered on 34.5° E, 87.5° N, with radius 150 km and velocities perturbed by 15% between 70 and 100 km depth. The models output from synthetic tests for input a) and b) are shown respectively in c) and d). All four profiles run from 10° N, 87° E to 40° N, 88° E. Resolution tests were performed to test the recoverability of 3D heterogeneities in the velocity model. The first test is for a cylindrical low velocity zone of radius 500 km with velocities perturbed by 15% between 0 and 70 km depth relative to the reference model, intended to simulate the slow crust of the Tibetan Plateau. Path averaged velocity structures were calculated for each path through the model which were then used to create a synthetic dispersion curve for each path. Synthetic dispersion data were tomographically inverted in the same way as the real data to create group velocity maps. The shear velocity structure beneath the profile shown in a) was then estimated from inversion of group velocity dispersion curves extracted every 15 km along the profile from the group velocity maps. The recovered velocities in b) reasonably reproduce the input model in a). The base of the low velocity anomaly between 0 and 70 km, representing the slow Tibetan crust, is smeared out by approximately 20 km. The low upper mantle velocities seen beneath Tibet in this study extend more than 40 km below the base of the crust and are unlikely to be an artefact of the inversion process. Regions where the reference model is unperturbed are generally reproduced to an accuracy of 3% by the inversion. The second test c) is for a cylindrical low velocity zone of radius 150 km with velocities perturbed by 15% between 70 and 100 km. d) shows that a velocity anomaly of this magnitude and lateral extent (~3°) at this depth and location is resolvable but does incur a loss in amplitude and smearing. Herrmann, R. B., and C. J. Ammon (2004), Computer programs in seismology, surface waves, receiver functions and crustal structure, Saint Louis Univ., Saint Louis, Mo. Ritzwoller, M. H., and A. L. Levshin (1998), Eurasian surface wave tomography: Group velocities, J. Geophys. Res., 103(B3), 4839–4878, doi:10.1029/97JB02622.