IJTM/IJCEE PAGE TEMPLATEv2
advertisement

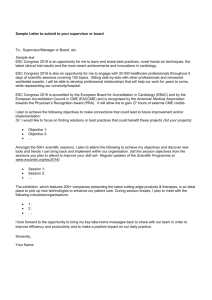
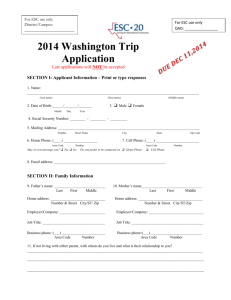
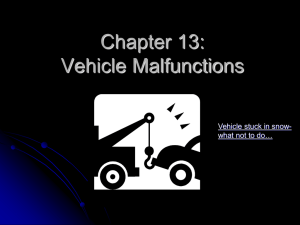
Int. J. of Vehicle Systems Modelling and Testing , Vol. x, No. x, xxxx Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Weidong Pan and Yiannis E. Papelis National Advanced Driving Simulator, The University of Iowa, 2401 Oakdale Blvd., Iowa City, IA 52242-5003, USA E-mail: wpan@nads-sc.uiowa.edu, yiannis@nads-sc.uiowa.edu Abstract: This paper presents an approach to real-time dynamic simulation of vehicles with electronic stability control (ESC). The approach involves the integration of ESC software into the powertrain and brake models of the realtime vehicle dynamic simulation environment of the National Advanced Driving Simulator (NADS). The ultimate goal of this integration is the use of ESC equipped vehicles in simulator-based human factors experimentation assessing the effectiveness of ESC in avoiding loss of control accidents. The effectiveness of this approach in simulating ESC is demonstrated through the development and validation of two vehicle models, one for a 2003 Ford Expedition and the other for a 2002 Oldsmobile Intrigue, both equipped with ESC. Results show close correlation of vehicle behavior between the test data and the simulation data. In addition, the timing and magnitude of the simulated ESC activity correlate closely with the test results. Keywords: active safety systems, driving simulator, electronic stability control, multibody vehicle dynamics, real-time vehicle dynamic simulation, vehicle modeling and validation Reference to this paper should be made as follows: Pan, Weidong, and Papelis, Yiannis E. (xxxx) ‘Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation’, Int. J. of Vehicle Systems Modelling and Testing, Vol. X, No. Y, pp. 000-000. Biographical notes: Weidong Pan is an associate research engineer at the National Advanced Driving Simulator. He earned his Ph.D. in mechanical engineering from the University of Iowa. His academic and research career has focused on flexible multibody dynamics, vehicle dynamics modeling and realtime simulation, and high-fidelity tire-soil and tool-soil interaction modeling and simulation technology. He has published in journals such as Computer Methods in Applied Mechanics and Engineering and Mechanics of Structures and Machines. Dr. Yiannis Papelis is a research scientist and chief technical officer at the National Advanced Driving Simulator. He earned a Ph.D. in electrical and computer engineering from the University of Iowa and has been involved in driving simulation research for the past 15 years. Dr. Papelis has initiated and led numerous transportation safety research projects focusing on in-vehicle devices and vehicle design. He has also consulted with industry on simulator development projects in the U.S., Europe, and Asia. His research interests include transportation safety research, synthetic environment modeling, and simulation, and he has published in journals such as IEEE Computer and Transactions on Software Engineering, as well as in numerous conference proceedings. Copyright © 200x Inderscience Enterprises Ltd. 1 W. Pan and Y. Papelis 1 Introduction Vehicle design has evolved significantly over the last decade, with new safety features available on more and more vehicles. The latest addition is electronic stability control (ESC). During severe maneuvers, such as obstacle avoidance, the ESC senses impending loss of control and selectively brakes individual wheels and intervenes in the enginemanagement system to help the driver maintain control of the vehicle. Early statistical studies have shown that vehicles with ESC have fewer accidents than vehicles without; however, there has been no empirical study of ESC effectiveness with normal drivers. Testing a new design or studying the effectiveness of an existing safety system like ESC in the real world is difficult because such systems are designed to prevent accidents and thus function only in severe and risky situations. High-fidelity driving simulation, where the virtual environment ensures maximum driver immersion without the risks associated with the driving situations necessary to exhibit the potential benefits of ESC, is an ideal alternative. However, properly testing ESC on a driving simulator requires the modeling and integration of ESC into the vehicle dynamics used in the real-time simulation. Real-time vehicle dynamics simulation is a key enabling technology in a high-fidelity driving simulator. Given the driver control over the steering wheel, brake pedal, accelerator pedal, and gear shift, vehicle dynamics must predict all information required by the motion system (velocity and acceleration), visual system (position and orientation), and audio system (powertrain, tires), in real time. The development of the NADSdyna software a decade ago represents an early effort to achieve this capability (CCAD, 1995). The software, with incremental enhancements over the years, now runs at the National Advanced Driving Simulator at the University of Iowa. There are several challenges when integrating an ESC model into real-time dynamics code. First, the ESC system is only activated during very aggressive maneuvers, at which point, there are severe nonlinearities in the vehicle suspension and tires. The vehicle dynamics model must be of adequate fidelity and utilize high-quality data. For example, the tire model must adequately simulate large slip angles and slip ratios. This problem was addressed by obtaining, in a test laboratory environment, tire data for large slip angles and slip ratios. This data was used to calibrate the simulation models, thus ensuring close match to real-world aggregate vehicle performance. Secondly, the ESC system implementation uses complicated proprietary algorithms that are not easily reproduced. In this case, this problem was addressed by two ESC manufacturers willingness to provide a library containing the actual software that runs in the vehicle ESC controller to the University of Iowa. This software was integrated into the NADS vehicle model, thus ensuring identical behavior of the ESC system between the real world and the simulation. The two ESC-equipped vehicles that were modeled are the 2003 Ford Expedition and the 2002 Oldsmobile Intrigue. The ultimate purpose of this modeling effort was to utilize these models in a simulator-based human factors study comparing loss of control with and without ESC, under typical loss-of-control driving situations (Papelis et al., 2004). This paper is organized as follows. The approach to incorporating ESC software into NADSdyna is presented in Section 2. In Section 3, the development of the real-time Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation model of a passenger car and the real-time model of a sports utility vehicle (SUV) is presented. In Section 4, effectiveness of the vehicle dynamics modeling approach is demonstrated by comparing simulation results and test data for several relevant maneuvers. The integration time step-size for all simulations presented in this paper is 1/960 second, and the sampling rate of ESC software is 960 Hz. 2 Incorporating ESC into powertrain and brake model Before the advent of ESC, the most popular active driving safety systems were the Antilock Brake System (ABS) and the Traction Control System (TCS). The primary function of ABS is to control the brake slip of the wheels to within a narrow range around the slip value at which the longitudinal tire force peaks. The range is also where the tire lateral force response to slip angle is usually sufficient to keep the vehicle stable and steerable (Pacejka, 2002). ABS uses wheel speed sensors to compute wheel slip and achieves its control objectives by modulating wheel brake pressure. The primary function of TCS is to control the drive slip of the driven wheels so that it is around the slip value at which the longitudinal tire force peaks. A TCS system uses the same wheel speed sensors as the ABS but calculates drive slip as input to the control algorithm that decides the appropriate brake pressure at driven wheels. To obtain optimal results, TCS sometimes intervenes with the engine management to reduce engine power. TCS prevents wheel spin during straight-line acceleration. It also prevents skidding when accelerating too much in a turn. Both ABS and TCS monitor wheel speed and take action based on the value of computed wheel slip (brake slip and drive slip, respectively). ESC contains all the capabilities of ABS and TSC. In addition, it also monitors steering wheel angle, accelerator position (read from engine ECU), primer pump pressure in the brake system, vehicle lateral acceleration, and vehicle yaw rate (Robert Bosch GmbH, 1999a). Based on this additional information, the ESC estimates driver intention, computes vehicle behavior, and then develops a control strategy to steer and/or slow the vehicle through brake application and engine intervention during situations where the vehicle is about to go out of control. For TCS/ESC to intervene with engine management, an electronic throttle control (ETC), also known as drive-by-wire, must replace the conventional mechanical linkage between the accelerator pedal and the internal combustion engine throttle valve (or diesel injection pump). Let ˆ 0,90 be the accelerator pedal angle, 0,1 be the commanded throttle by the TCS/ESC system, and I etc be a Boolean variable with a 1 indicating the TCS/ESC command should be honored and a 0 indicating the command should be disregarded. An ETC model can be expressed using the following equation: if I etc 1 (1) ˆ / 90 if I etc 0 where is the actual throttle passed to engine model. Note that in a drive-by-wire system, control commands from TCS/ESC have higher priority than commands from the driver (Robert Bosch GmbH, 1999b). W. Pan and Y. Papelis 2.1 Definition of the inputs and outputs of driving safety systems Based on the above discussion, one can summarize that an ESC takes three groups of information--driver inputs; chassis and wheel translational and rotational velocity and acceleration (vehicle states); and powertrain states--and achieves its control objectives through braking and engine/powertrain intervention. Thus, a generic interface for describing ESC in the context of vehicle dynamic simulation can be defined as shown in Fig. 1. The interface is general because all driver, vehicle, and powertrain information is included as input and different types of brake and engine intervention are included as output. It is expected that the interface will cover current and future driving safety systems to a great extent. Details of the inputs and outputs are described in the following paragraphs. Information that is not used by today’s ESC systems is intentionally included, with the assumption that future sensor technology and vehicle control algorithms will lead to more advanced driving safety systems that can use the information. The vector of driver inputs consists of accelerator pedal position ˆ , brake pedal force Fbpedal , steering wheel angle , steering wheel velocity , and current gear selection I selector ; i.e., T (2) x1 ˆ, Fbpedal , , , I selector The vector of wheel kinematic information consists of wheel spin velocity i , i 1, i , , 4 and wheel spin acceleration i 1, , 4 at previous time step; i.e., x 2 1 , 2 , 3 , 4 , 1 , 2 , 3 , 4 T (3) The vector of powertrain information consists of engine speed e , engine output torque Te , the current gear in transmission gear box I gear , transmission output torque TTR , powertrain operation model I mode (two-wheel drive, four-wheel drive, or all-wheel drive), differential operation mode J mode (locked, unlocked, or controllable), transfer case operation mode K mode , and transfer case torque split ratio tcase ; i.e., T x3 e , Te , I gear , TTR , I mode , J mode , K mode ,tcase (4) The vector of chassis kinematic information, assuming use of the SAE vehicle coordinate system, is T x4 x , y , z , x , y , z , x , y , z , vx , vy , vz , ax , a y , az (5) where x| y| z are the roll, pitch, and yaw angles; x| y| z are the roll, pitch, and yaw rates; x| y| z are the roll, pitch, and yaw accelerations at the previous time step; v x| y | z are the longitudinal, lateral, and vertical velocities at the center of gravity; and a x| y| z are the longitudinal, lateral, and vertical acceleration at the center of gravity at the previous time step. These quantities can be computed from chassis location r1 , orientation matrix A1 , angular velocity ω1 , and CG location ρ1 relative to the origin of the chassis body reference frame, all reported by multibody dynamics, using the following equations: Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation x atan2 A1 , A1 , y atan2 A1 , A12 A12 , z atan2 A1 , A1 32 33 T 31 11 21 21 T x , y , z A1T ω1 , x , y , z A1T ω1 The contents of T (6) (7) vx , vy , vz A1T r1 ω1ρ1 , ax , a y , az A1T r1 ω1ρ1 ω1ω1ρ1 T 11 (8) x 5 depends on the ESC software to be integrated. While some of these values are often hard-coded, for the purpose of simulation it is beneficial to have the ability to disable ESC to facilitate the necessary comparison. Thus, a Boolean flag I esc is included in the x5 vector and is defined as follows: I esc 0 : disable all safety feature 1: enable ABS 2 : enable ABS/TCS 3 : enable ABS/TCS/ESC (9) On the output side, the generic interface lists three quantities for engineintervention; y1 , y2 , and y3 . They are redundant, and only one is active for a specific ESC model. The redundancy is necessary to make the interface useful for integrating ESC software developed by different manufacturers. A flag, I eng , must be included in the y 6 vector to indicate which channel is to be used by multibody vehicle dynamics. The flag is defined as follows: 0 : to disregard y1 , y2 , y3 1: to honor y1 I eng (10) 2 : to honor y2 3 : to honor y3 Similarly, the brake intervention quantities, y 4 and y 5 , are redundant, and only one is active for a specific ESC model. Another flag, Ibrk , must be defined in the y 6 vector, as follows: 0 : to honor y 4 I brk 1: to honor y 5 (11) 2.2 Integration into vehicle dynamics As shown in Section 2.1, ESC outputs are directed to powertrain (via engine intervention) and brake systems. In real-time vehicle dynamics formulation, a powertrain model consists of models for the engine, torque converter, automatic transmission, transfer case, differential, and final drive. The inputs to the engine model are throttle opening and current engine speed; the output is engine torque. The inputs to the torque converter are engine torque and the speed ratio of torque convert input shaft (which equals engine speed) to the transmission input shaft speed. Outputs are the load applied on the engine W. Pan and Y. Papelis flywheel and the driving torque applied on the transmission input shaft. The primary function of all other components, including transmission, transfer case (if applicable), differential, and final drive, is to transmit the torque at the transmission input shaft to individual driven wheels through a sequence of gear pairs and shafts connected by universal joints or constant velocity joints. Depending on the value of I eng , the ESC engine intervention is achieved in different ways involving different components of the powertrain model. When I eng 1 , ESC directly computes the desired engine throttle engine . This control can be realized by simply feeding the desire throttle to the ETC model in Eq. 1; i.e., y1 , I etc 1 (12) In the case of I eng 2 , the ESC model computes desired engine torque. Because engine torque is an output of the engine model, a controller such as a ProportionalIntegral-Derivative (PID) controller must be designed to use the difference between the engine output torque and the ESC-desired torque to gradually adjust the throttle until the difference diminishes, as shown in Fig. 2. A much simpler approach is to ignore the torque computed by the engine model and directly use the desired torque as an input to the torque converter. This approach is equivalent to having an infinitely powerful controller in Fig. 2 that brings the throttle to the desired value instantly. Such implementation is shown in Fig. 3. Some ESC software computes only the desired torque at the transmission output axle, which corresponds to I eng 3 . In this case, a controller must be introduced to adjust the throttle until the desired axle torque equals the torque computed from the powertrain model, as shown in Fig. 4. It is generally not acceptable to directly apply the desired torque at the transmission output shaft in order to maintain consistency in the powertrain model formulation. The model for the conventional brake system in real-time vehicle dynamics formulation contains a model of a pneumatic/hydraulic system that transforms brake pedal force into caliper pressure at individual wheel brakes and a model that converts caliper pressure into brake torque for each wheel. Thus, depending on the value of I brk , the brake intervention function of ESC can be brought into the vehicle dynamics model in two ways, as shown in Figs. 5 and 6. When I brk 0 , the ESC system computes the desired caliper pressure at each wheel. The pressure is then passed to the second part of the conventional braking system model to compute wheel brake torque. When Ibrk 1 , the ESC system computes the desired wheel torque at individual wheels. In this case, the desired torque is directly applied to the wheels. Thus, the conventional brake model is entirely bypassed. In either case, brake pressure dynamics are handled by ESC software. The complexity of the brake pressure dynamics model in ESC software varies. As a final note, almost all ESC software contains digital controllers, which usually require a sampling rate of as high as 1000 Hz. When vehicle dynamics equations of motion are integrated at the same rate, vehicle information at the current time step can be directly passed into ESC software. When the equations of motion are integrated at a lower rate, computed vehicle information should be re-sampled, and multiple calls to ESC software must be made for each integration time step of vehicle dynamics. Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation 3 Modeling of two ESC-equipped vehicles Two vehicle models are described in this section. All model data, except for the powertrain and aerodynamics, were derived from measurements made by SEA, Inc. and its subcontractors (S.E.A. Inc., 2003a; S.E.A. Inc., 2003b). 3.1 2003 Ford Expedition The Expedition employs a short-long arm (SLA) or double A-arm suspension on all four wheels. For each wheel a lower control arm, upper control arm, and knuckle are modeled as bodies. The upper and lower control arms are connected to the chassis with revolute joints and to the knuckles with spherical joints. The Expedition uses rack and pinion steering. Only the rack is modeled as a body, and it is connected to the chassis using a translational joint. The ratio of steering wheel angle to rack displacement is 121.0 rad/m. The tie rods connecting the front knuckles to the rack and the lateral links connecting the rear knuckles to the chassis are not modeled as bodies but as distance constraints to save computational effort. The wheels are not modeled as rigid bodies; only the rotational degree of freedom relative to the knuckle it attaches to is modeled as a state equation. The rotational inertia for the front wheels is 2.5462 kg- m 2 and the rotational inertia for 2 the rear wheels is 2.2642 kg- m . Mass and inertia of the wheels (except rotational inertia) are added to the knuckle bodies. A topology map showing how the bodies are connected is shown in Fig. 7. The mass, initial position of center of gravity (CG), and inertia of each of the bodies are shown in Table 1. The CG locations are relative to a global coordinate system whose origin is located at ground level directly below the front axle and at the vehicle centerline and whose axes follow the SAE convention; i.e., x forward, y to the right, and z down. The local coordinates used to define the inertia properties in Table 1 for the chassis are the SAE vehicle coordinates. The x axis of the upper and lower control arms is the line of the pivot of the revolute joint connecting the control arms to the chassis. The y axis is normal to the line of pivot through the point of the spherical joint connecting the control arm to the knuckle. The z axis is then normal to each of these axes. The y axis for the knuckles is the rotation axis of the wheel pointing to the right of the vehicle. The x axis is in the forward direction, and the z axis is downward. The x axis for the rack is along its direction of motion. The y and z axes are arbitrarily chosen as normal to the x axis. For each corner of the suspension, the locations of the ten points shown in Fig. 8 are measured. Global positions of the points describing the driver-side front and rear suspension are shown in Table 2. Symmetry is assumed about the vehicle’s centerline to describe the passenger-side suspensions. These points are used to define the joints and force elements on each body by converting the global coordinates into the body’s local coordinate system. The curves for the front and rear suspension springs and shocks are shown in Fig. 9. The roll stiffness of the front stabilization bar is set to 125000N/rad. The roll stiffness of the rear stabilization bar is set to 25000N/rad. These values are determined via a trialand-error procedure so the simulated roll angle best matches the test data for steering maneuvers. W. Pan and Y. Papelis The powertrain model for the Expedition is based the model used for the 1997 Jeep Cherokee (Salaani, Guenther, and Heydinger, 1999), with the following changes: The engine map is scaled such that it generates 260 horsepower at 4500 RPM and 350 Lb-ft torque at 2500 RPM. The speed of the engine is limited to 628.3 rad/s or 6000 rpm. Gear ratios for the Expedition’s 4-speed automatic transmission are 2.84, 1.55, 1.00, and 0.70 for the forward gears and -2.32 for the reverse gear. The final drive gear ratio is 3.55. The steady-state tire model by Allen et al. (Allen, Rosenthal, and Chrstos, 1997) is used in conjunction with the transient slip and slip angle formulation (Bernard and Clover, 1995) to compute real-time tire forces and moments. The tire model relies heavily on test data for accurate simulations. A full description of the model is given by Allen, Rosenthal, and Chrstos (1997), Bernard and Clover (1995), and Salaani and Heydinger (1998). Tire parameters for computing normal force FN , transient slip, and transient slip angle are: tire free radius 0.397 m, tire rolling radius 0.37338 m, radial stiffness 270394 N/m, lateral relaxation length 0.5916168 m, radial damping 2000 Nsec/m, longitudinal damping coefficient 5000 N-sec/s, lateral damping coefficient 5000 N-sec/s, and longitudinal relaxation length 0.1 m. In addition, rolling resistance is set to 2% of normal force, and the nominal friction coefficient in both longitudinal and lateral directions is set to 0.85. Parameters for computing tire forces and moments are as follows, where the “ft-lbf” unit system is used for all parameters unless otherwise indicated. Meanings of the symbols can be found in references 9 and 11. Tw 10.4 in, FZT 2403 lbf, Tp 35 psi A0 1063.4, A1 21.169, A2 4794.7, A3 0.87326, A4 29825 Ka 0.0365, Kx 0.3014, K y 7.9655 105 0.45091FN B1y 1.9037 104 , B3 y 1.1947, B4 y 2.2025 108 K 0.9, CSFZ=17.7325, K1 1.1993 104 C1 0.6633, C2 0.2184, C3 0.4867, C4 0.1622, C5 1.2732 G1 1.3139, G2 1.0 B1x 4.7226 104 , B3x 1.2688, B4 y 2.879 107 , K x 0.303 Klt 3.0012 108 3.514 105 FN The coefficients B1x , B3x , B4 x are obtained by curve-fitting the peak longitudinal force coefficient, px , to test data using a second-order polynomial (Allen, Rosenthal, and Chrstos, 1997); i.e., . px B3x B1x FN B4 x FN2 (13) Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation The maximum normal load for all straight-line braking/traction tests is 1000 lb, which is exceeded during simulation because the curb load per rear wheel is 1410 lb. It is observed from test data that px approaches a constant value as normal force approaches 1000 lb. Simple calculation using Eq. 13 yields an erroneous prediction when the normal load is larger than 1000 lb. To avoid this problem, Eq. 13 is modified as follows: px B3 x B1x min 1000, FN B4 x min 10002 , FN2 (14) The aerodynamics model and data for the Expedition are taken from the Jeep Cherokee model in reference 8, with the cross-sectional area increased to 2.750 m 2 and the wheelbase increased to 3.018 m. The ESC software for the Expedition was provided by Continental-Teves. This software models all the logic of the onboard computer that determines when to activate the ABS, TCS, or ESC and models the hydraulics of the braking system. This software was integrated into NADSdyna with Ibrk 1 and I eng 3 . The PID controller parameters are K P 0.06 / 90, K I 30 / 90, K D 1.5 / 90 (15) 3.2 2002 Oldsmobile Intrigue The Intrigue employs a MacPherson strut suspension on the front and rear. In the front, each wheel has a lower control arm, knuckle, and piston modeled as bodies. The lower control arms are connected to the chassis with revolute joints and to the knuckle with spherical joints. Each piston body is connected to the chassis with a translational joint, and the knuckles are connected with a spherical joint. In the rear, each wheel has two lateral links, a knuckle, and a piston modeled as bodies. The lateral links are connected to the chassis with universal joints, and the knuckles are connected with spherical joints. As in the front, the pistons are connected to the chassis with a translational joint, and the knuckles are connected with a spherical joint. The Intrigue uses rack and pinion steering. Only the rack is modeled as a body, and it is connected to the chassis using a translational joint. The ratio of steering wheel angle to rack displacement is -141.8 rad/m. The tie rods connecting the front knuckles to the rack and the lateral links connecting the rear knuckles to the chassis are not modeled as bodies, but rather as distance constraints to save computational effort. Similar to the Expedition model, the wheels are not modeled as rigid bodies; only the rotational degree of freedom is modeled as a state equation. The 2 inertia for the front wheels is 1.3992 kg- m , and the inertia for the rear wheels is 1.3437 2 kg- m . Mass and inertia of the wheels (except rotational inertia) are added to the knuckle bodies. A topology map showing how all bodies are connected is shown in Fig. 10. The mass, initial position of CG, and inertia of each of the bodies are shown in Table 3. The CG locations are relative to a global coordinate system whose origin is located at ground level directly below the front axle and at the vehicle centerline and whose axes follow the SAE convention. The local coordinates used to define the inertia properties in Table 3 for the chassis are the SAE coordinates. For the front suspension, the x axis of the lower control arms is the line of the pivot of the revolute joint connecting the control arms to the chassis. The W. Pan and Y. Papelis y axis is normal to the line of pivot through the point of the spherical joint connecting the control arm to the knuckle, and the z axis is then normal to each of these axes. The pistons have the z axis along the motion of the translational joint, and the x and y axes are arbitrarily chosen normal to the z axis. The y axis for the knuckles is the rotation axis of the wheel pointing to the right of the vehicle. The x axis is in the forward direction, and the z axis is downward. The x axis for the rack is along its direction of motion. The y and z axes are arbitrarily chosen as normal to the x axis. For the rear suspension, the pistons have the z axis along the motion of the translational joint, and the x and y axes are arbitrarily chosen normal to the z axis. The lateral links have the x axis s along the length of the tubular bodies, and the y and z axes are arbitrarily chosen normal to the x axis. The y axis for the knuckles is the rotation axis of the wheel pointing to the right of the vehicle. The x axis is in the forward direction, and the z axis is downward. In addition to the body CG location, several “hard points” shown in Fig. 11 were measured. The points describing the driver-side front and rear suspension are shown in Table 4. Symmetry is assumed about the vehicle’s centerline to describe the passengerside suspensions. The measurements are relative to the global coordinate system--the same as the CG locations. These points are used to locate the joints and force elements on each body by converting the global coordinates into the body’s local coordinate system. The curves for the front and rear suspension springs and shocks are shown in Fig. 12. The roll stiffness of the front stabilization bar is set to 37500N/rad. The roll stiffness of the rear stabilization bar is set to 5000N/rad. These values are determined via a trial-anderror procedure so the simulated roll angle best matches the test data for steering maneuvers. The powertrain model for the Intrigue is based on the model used for the 1998 Chevrolet Malibu (Salaani, Heydinger, and Grygier, 20001), with the following changes: The engine map is scaled so it generates 215 horsepower at 5600 RPM and 230 lb-ft at 4400 RPM. The speed of the engine is limited to 586.5 rad/s or 5600 rpm. Gear ratios for Intrigue’s four-speed automatic transmission are 2.92, 1.57, 1.0, and 0.71 for the forward gears and -2.39 for the reverse gear. The shifting logic map for the Jeep (Salaani, Guenther, and Heydinger, 1999) is used instead of the Malibu’s. The final drive gear ratio is 3.29. Tire parameters for computing tire normal force, transient slip, and transient slip angle are: tire free radius 0.339 m, tire rolling radius 0.327 m, radial stiffness 209530 N/m, lateral relaxation length 0.5873496 m, radial damping 2000 N-sec/m, longitudinal damping coefficient 5000 N-sec/s, lateral damping coefficient 5000 N-sec/s, and longitudinal relaxation length 0.1 m. In addition, rolling resistance is set to 2% of normal force, and the nominal friction coefficient in both longitudinal and lateral directions is set to 0.85. Parameters for computing tire forces and moments are as follows, where the “ftlbf” unit system is used for all parameters unless otherwise indicated. Tw 6.39 in, FZT 1609 lbf, Tp 34 psi A0 309.41, A1 20.059, A2 3567.6, A3 0.74501, A4 8454 Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Ka 0.0441, Kx 0.0088, K y 1.8821104 0.64896FN B1y 3.6045 104 , B3 y 1.348, B4 y 6.4635 108 K 0.9, CSFZ=19.4019, K1 1.5125 104 C1 0.7566, C2 0.6061, C3 0.7454, C4 0.2879, C5 1.2732 G1 1.1904, G2 1.0 B1x 1.6071105 , B3x 1.0656, B4 y 2.2099 108 , K x 0.2732 K lt 6.1435 108 7.3796 10 5 FN The peak longitudinal force coefficient, px , is computed using the following equation: px B3 x B1x min 1250, FN B4 x min 12502 , FN2 (16) Aerodynamics model and data for the 1998 Malibu (Salaani, Heydinger, and Grygier, 2001) is used, with the wheelbase increased to 2.769 m. The ESC software for the Intrigue was provided by Bosch. This software models all the logic of the onboard computer that determines when to activate the ABS, TCS, or ESC, and models the hydraulics of the braking system. This software was integrated into the NADSdyna with Ibrk 1 and I eng 2 with the simplified approach shown in Fig. 3. 4 Validation To validate the vehicle models presented in Section 3, a 2002 Oldsmobile Intrigue and a 2003 Ford Expedition were instrumented and run through a series of maneuvers in a proving ground by Bosch and Continental-Teves, respectively. The driver response for each of these maneuvers; i.e., steering wheel angle, accelerator pedal position, and brake pedal force, was measured. The measured driver inputs were passed through a low-pass Butterworth filter with a frequency cutoff of 4 Hz and then used to drive the simulated vehicle. The measured vehicle data was compared to the simulated data for each maneuver. There are some known discrepancies between the NADSdyna simulation and the test vehicle. First, outriggers were installed on the vehicle for some maneuvers for safety reasons but were not modeled in NADSdyna as the effects were assumed to be small. Also, acceleration values were taken at the chassis CG location in NADSdyna. The exact location of the instruments on the test vehicle is unknown but is assumed to be fairly close to the CG. 4.1 Straight-line acceleration The straight-line acceleration maneuver is intended to validate the powertrain model, including the engine torque map, transmission shifting curves, gear ratios, and torque converter. For the Expedition model, simulations were performed to accelerate the W. Pan and Y. Papelis vehicle from 0 to 70 mph with throttle values of 25%, 50%, 75%, and 100%. The vehicle speed is shown in Fig. 13. For all simulations, the speed was very close to the test data. For the Intrigue model, simulations were performed to accelerate the vehicle from 20 to 70 mph with throttle values of 25%, 50%, 75%, and 100%. The vehicle speed comparison is shown in Fig. 13. For the 25% throttle maneuver, the vehicle speeds are very close throughout the simulation. The other maneuvers are not as close, but are still fairly good. 4.2 Straight-line braking The straight-line braking maneuver is intended to test the overall performance of the braking system. For the Expedition, two maneuvers were performed; the results are shown in Fig. 14. Also shown in the Fig. 14 are the time histories of brake pedal force that were measured during the field test and fed into the simulation model. For each maneuver, the test vehicle has a slightly larger longitudinal acceleration than the simulation vehicle, which is seen in the vehicle speed. For the Intrigue, simulations were performed to brake the vehicle with initial vehicle speeds of approximately 25, 40, and 60 mph; the vehicle speed is shown in Fig. 14. Also shown in Fig. 14 are the time histories of brake pedal force that are fed to simulation model. Note that only brake pedal displacement was measured during the field test and that the brake pedal force fed to simulation is computed from brake pedal displacement using a steady-state relation between them. For each maneuver, the simulated vehicle stops before the test vehicle. The most likely reason for the discrepancy is the lack of actual brake pedal force time histories experienced during field test. 4.3 Pulse steer The pulse steer maneuver is a very quick steering input to test the transient directional dynamics of the vehicle. For the Expedition, one maneuver was performed, and the results are shown in Fig. 15. Also shown in the figure is the time history of steering wheel angle that was measured during the field test and fed into the simulation model. As shown in Fig. 15, the roll rate, yaw rate, and lateral accelerations are all very close except for the peaks of the maneuvers. For the Intrigue, one maneuver was performed; the results are shown in Fig. 15. Also shown in the figure is the time history of steering wheel angle that was measured during the field test and fed into the simulation model. The steering maneuver was severe enough to cause the intervention of ESC. The vehicle speed, lateral acceleration, and yaw rate all match very well, which points to good overall correlation of the directional dynamics of the vehicle. 4.4 Double lane change The double lane change is used to test the handling of the vehicle. This maneuver is important because it most resembles the types of maneuvers that the ESC responds to in order to help prevent vehicle spin-out. For the Expedition, the maneuver was first performed with ESC activated (i.e., I esc 3 in Eq. 9), and the results are shown in Fig. 17. As illustrated, there are some differences in the lateral accelerations and yaw rate Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation between the test vehicle and the simulated vehicle. The brake pressures shown in Fig. 18 indicate that the ESC is activated at similar times, except for a small activation around two seconds for the simulated vehicle. Next the maneuver was performed without ESC, and the results are shown in Fig. 16. Here the lateral acceleration and yaw rate diverge a little more than with ESC activated. For the Intrigue, two double lane change maneuvers are performed at 60 mph with and without ESC. Both maneuvers, shown in Figs. 16 and 17, give similar results. In both cases, the lateral acceleration and yaw rate remain close until the return to the original lane, when the simulated vehicle maintains better control and the results diverge. Brake pressures shown in Fig. 18 indicate that the ESC is activated at very similar times, except for the rear right wheel. 5 Conclusions The approach to incorporating ESC software into a real-time vehicle dynamics simulation environment is described, and its effectiveness is demonstrated through integration of ESC software provided by Continental-Teves and Bosch. Vehicle models of a 2003 Ford Expedition and a 2002 Oldsmobile Intrigue, both come equipped with ESC, were developed. The results of these models have been compared with test data for several key maneuvers, including straight-line accelerations, straight-line braking, pulse steer, and double lane change. Results show that the timing and magnitude of the ESC activity correlate very closely with the test results and that the simulated vehicles behave very similarly to the test vehicles. Areas that could use improvement are the stabilization bar model, the shock absorber model, and the tire model. The stabilizer bar stiffness is treated as a constant, although it is very likely that the stiffness of the stabilizer bars is nonlinear. The current shock absorber model does not include any dependence on the frequency of the motion, although the test data shows a clear dependence on frequency. In order to improve accuracy in very aggressive maneuvers, a more physical-based tire model is need. Acknowledgments We would like to thank Continental-Teves and Bosch for their support in this effort. Also, we would like to thank M. Kamel Salaani of the Transportation Research Center, Inc. and Gary J. Heydinger of S.E.A., Inc. for supporting the modeling efforts in this study. References Allen, R.W., Rosenthal, T.J., and Chrstos, J.P. (1997) ‘A vehicle dynamics tire model for both pavement and off-road conditions’, Technical Paper 970559, SAE. Bernard, J.E. and Clover, C.L. (1995) ‘Tire modeling for low-speed and high-speed calculations’, Technical Paper 950311, SAE. Center for Computer-Aided Design (CCAD) (1995), ‘NADS Vehicle Dynamics Simulation, Release 4.0’, The University of Iowa, Iowa City, IA. W. Pan and Y. Papelis Pacejka, H.B. (2002) Tyre And Vehicle Dynamics. Butterworth-Heinemann, Oxford. Papelis, Y., Brown, T., Watson, G., Holtz, D., and Pan, W. (2004) ‘Study of ESC assisted driver performance using a driving simulator’, Technical Report N04-003, The National Advanced Driving Simulator, The University of Iowa, Iowa City, IA. Robert Bosch GmbH (1999a) Driving-safety systems [Editor-in-chief, Horst Bauer; translation, Peter Girling], 2nd edition. Robert Bosch GmbH, Stuttgart, Germany. Robert Bosch GmbH (1999b) Automotive electrics and electronics [Editor-in-chief, Horst Bauer; translation, Peter Girling], 3rd edition. Robert Bosch GmbH, Stuttgart, Germany. S.E.A. Inc. (2003a) ‘Vehicle inertia measurement facility, suspension kinematics and compliance, shock absorber, suspension component geometric and inertia, and tire test measurement results, 2003 Ford Expedition’, Report for Continental Teves, Continental Teves. S.E.A. Inc. (2003b) ‘Vehicle inertia measurement facility, suspension kinematics and compliance, shock absorber, suspension component geometric and inertia, and tire test measurement results, 2002 Oldsmobile Intrigue’, Report for Bosch, Bosch. Salaani, M.K. and Heydinger, G.J. (1998) ‘Powertrain and brake modeling of the 1994 Ford Taurus for the National Advanced Driving Simulator’, Technical Paper 981190, SAE. Salaani, M.K., Guenther, D.A., and Heydinger, G.J. (1999) ‘Vehicle dynamics modeling for the National Advanced Driving Simulator of a 1997 Jeep Cherokee’, Technical Paper 1999-010121, SAE. Salaani, M.K., Heydinger, G.J., and Grygier, P.G. (2001) ‘Parameter determination and vehicle dynamics modeling for the NADS of the 1998 Chevrolet Malibu’, Technical Paper 2001-010140, SAE. Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation y1 : Requested throttle opening x1 : Driver inputs y2 : Requested engine torque x 2 : Wheel kinematic info x3 : Powertrain info x 4 : Chassis kinematic info x5 : ABS/TCS/ESC parameters Figure 1 y3 : Requested axle torque ABS/TCS/ESC Model y 4 : Brake pressure at each wheel y 5 : Brake torque at each wheel y 6 : ABS/TCS/ESC status Inputs and outputs of a generic ABS/TCS/ESC model I esc ˆ ETC Model Engine W. Pan and Y. Papelis Flywheel, Torque Converter, and Transmission Models Te PID Figure 2 y2 Integration of ESC engine intervention into powertrain system I eng 2 TTR ˆ Engine Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Te min Flywheel, Torque Converter, and Transmission Models TTR y2 Figure 3 Simpler integration of ESC engine intervention into powertrain system I eng 2 I esc ˆ ETC Model PID Engine W. Pan and Y. Papelis Flywheel, Torque Converter, and Transmission Models Te y3 Figure 4 Integration of ESC engine intervention into powertrain system I eng 3 TTR Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Tb 4 Wheel 4 p1 Pnematic/Hydraulic System Model p4 y4 1 Figure 5 Tb1 Wheel 1 Wheel Brake 1 Wheel Brake n y4 4 Integration of ESC brake intervention into brake system I brk 0 W. Pan and Y. Papelis Wheel Brake 1 Tb1 Pnematic/Hydraulic System Model Wheel Brake n Tb 4 y5 1 Figure 6 Integration of ESC brake intervention into brake system when Ibrk 1 Wheel 4 p4 Wheel 1 p1 y5 4 Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation 2003 Expedition -------------------------------1 Chassis 2 Steering Rack 3 Front Right Upper Control Arm 4 Front Right Lower Control Arm 5 Front Right Knuckle 6 Front Left Upper Control Arm 7 Front Left Lower Control Arm 8 Front Left Knuckle 9 Rear Right Upper Control Arm 10 Rear Right Lower Control Arm 11 Rear Right Knuckle 12 Rear Left Upper Control Arm 13 Rear Left Lower Control Arm 14 Rear Left Knuckle r: revolute joint t: translational joint s: spherical joint d: distance constraint (tie rod or lateral link) Figure 7 2 d d 8 s t 6 7 4 r r d d 12 r r 9 r s s s 3 r r 1 14 5 s s s r 11 13 10 Graphical representation of a multibody model of a 2003 Ford Expedition s W. Pan and Y. Papelis Figure 8 Expedition points where joints and force elements are connected Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Figure 9 Expedition suspension spring and shock absorber curves W. Pan and Y. Papelis 2002 Intrigue ----------------1 chassis 2 strrack 3 piston_fr 4 lca_fr 5 knuckle_fr 6 piston_fl 7 lca_f1 8 knuckle_f1 9 piston_rr 10 latlink1_rr 11 latlink2_rr 12 knuckle_rr 13 piston_rl 14 latlink1_rl 15 latlink2_rl 16 knuckle_rl d d 2 8 5 t s t t 6 s s 7 s 3 4 r r d 16 t d 13 s s s 1 s u u 14 15 u: universal r: revolute s: spherical t: translational d: distance (tie rod or trailing arm) u u t 9 12 s 10 11 Figure 10 Graphical representation of a multibody model of a 2002 Oldsmobile Intrigue s Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Figure 11 Intrigue points where joints and force elements are connected W. Pan and Y. Papelis Figure 12 Intrigue suspension spring and shock absorber curves Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Figure 13 Straight-line acceleration at 25%, 50%, 75%, and 100% throttle (left: Expedition, right: Intrigue) W. Pan and Y. Papelis Figure 14 Straight-line braking (left: Expedition, right: Intrigue) Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Figure 15 Pulse steer maneuver (left: Expedition, right: Intrigue) W. Pan and Y. Papelis Figure 16 Double lane change maneuver with ESC off (left: Expedition, right: Intrigue) Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Figure 17 Double lane change maneuver with ESC on (left: Expedition, right: Intrigue) W. Pan and Y. Papelis Figure 18 Brake pressure during double lane change maneuver with ESC on (left: Expedition, right: Intrigue) Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Table 1 Expedition mass, CG, and inertia properties (base units: kg for mass, meter for length) W. Pan and Y. Papelis Table 2 Initial position of the points that define joints and force elements (unit: meter) Real-time dynamic simulation of vehicles with electronic stability control: Modeling and validation Table 3 Intrigue mass, CG, and inertia properties (base units: kg for mass, meter for length) W. Pan and Y. Papelis Table 4 Initial position of the points that define joints and force elements (unit: meter)