1.10 r.water.fea: A Distributed Hydrologic Model
advertisement

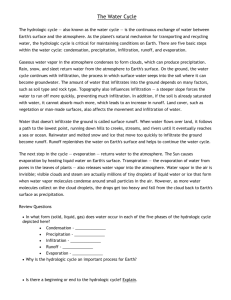
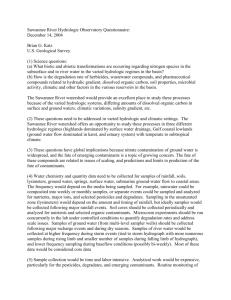
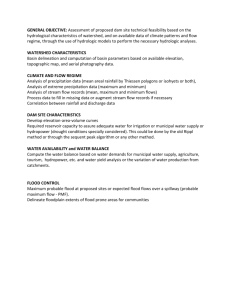
Chapter 1 Distributed Hydrologic Modeling Using GIS Excerpt from the book Distributed Hydrologic Modeling Using GIS, by Baxter E. Vieux, published by Kluwer, Dordrecht, the Netherlands, forthcoming in 2000/2001. Considering the spatial character of parameters and precipitation controlling hydrologic processes, it is not surprising that Geographic Information Systems (GIS) have become an integral part of hydrologic studies. The primary motivation of this book is to bring together the key ingredients necessary to use GIS to model hydrologic processes, i.e., the spatial and temporal distribution of the inputs and parameters controlling surface runoff. GIS maps describing topography, land use/cover, soils, rainfall, and meteorological variables may become model parameters or inputs in the simulation of hydrologic processes. Difficulties in managing and efficiently using spatial information have prompted hydrologists either to abandon it in favor of lumped models or to develop more sophisticated technology for managing spatial data (Desconnets et al., 1996). As soon as we embark on simulating hydrologic processes using GIS, we must address the issues that are the subject of this book. 1.1 Why Distributed Parameter Modeling? Historical practice has been to use lumped representations because of computational limitations or because sufficient data was not available to populate a distributed model database. How one represents the process in the mathematical analogy and implements it in the hydrologic model determines the degree to which we classify a 1 2 Chapter 1 model as lumped or distributed. Several distinctions on the degree of lumping can be made in order to better characterize a mathematical model, the parameters/input, and the model implementation. Whether a model is lumped or distributed depends on whether the domain is subdivided. It is clear that this is relative to the domain. If the watershed domain is to be distributed, the model must subdivide the watershed into smaller computational elements. This process often gives rise to lumped sub-basin models that attempt to represent spatially variable parameters/conditions as a series of sub-basins with average characteristics. In this manner, almost any lumped model can be turned into a semi-distributed model. Drawbacks associated with sub-basin lumping include: 1. The model is not physics-based, and 2. Sub-basin lumping may turn out to be extremely cumbersome to handle the data for a large number of sub-basins. Sub-basin lumping was an outgrowth of the concept of hydrologically homogeneous subareas. This concept centered on overlaying areas of soil, landuse/cover, and slope attributes producing sub-basins of homogeneous parameters. Sub-basins then could logically be lumped at this level. Whether hydrologically homogeneous areas can be justified depends on the uniform nature of many spatially variable parameters. For example, the City of Cherokee, Oklahoma suffers repeated flooding from storms having return intervals on the order of 2-year frequency falling on Cottonwood Creek (Figure 1.1). A lumped sub-basin approach using HEC-HMS 1. Distributed hydrologic modeling using gis 3 Figure 1.1. Contour map of the City of Cherokee in North-western Oklahoma and Cottonwood Creek draining through town. (HEC, 2000) is represented schematically in Figure 1.2. ‘Junction-2’ is located where the creek crosses Highway 64 on the Northwestern outskirts of the City limits. Each sub-basin must be assigned a set of parameters controlling the hydrologic response to rainfall input. Practitioners are just starting to profit from research into the development of distributed hydrology (ASCE, 1999). As distributed hydrologic models become more widely used in practice, the need for scientific principles relating to spatial variability, temporal and spatial resolution, information content, and calibration will become more apparent. Though contour lines are the traditional way of mapping topography, distributed hydrologic modeling requires a digital elevation model. The Cottonwood basin represented using a 60-m resolution digital elevation model is seen in Figure 1.3. A distributed 4 Chapter 1 Figure 1.2. HEC-HMS sub-basin definitions for the 125 km2 Cottonwood Creek. Figure 1.3. Hillshade digital elevation model and road network of the City of Cherokee and surrounding region. 1. Distributed hydrologic modeling using gis 5 approach to modeling this watershed would consist of a grid representation of topography, precipitation, soils, and landuse/cover. 1.2 Distributed Model Representation Figure 1.4 shows a schematic for classifying a deterministic model of a river basin. Deterministic is distinguished from stochastic in that a deterministic river basin model estimates the response to an input using either a physics-based or a conceptual mathematical representation. Conceptual representations usually rely on some type of linear reservoir theory to delay and attenuate the routing of runoff generated. Runoff generation and routing are not closely linked and therefore do not interact. Physics-based models use equations conservation of mass, momentum, and energy to represent both runoff generation and routing in a linked manner. Following the left-hand branch in the tree, the distinction between runoff generation and runoff routing is somewhat artificial, because they are intimately linked in most distributed model implementations. However, by making a distinction we can introduce the idea of lumped versus distributed parameterization for both overland flow and channel flow. A further distinction is whether overland flow or subsurface flow is modeled with lumped or distributed parameters. Routing flow through the channels using lumped or distributed parameters distinguishes whether uniform or spatially variable parameters are applied in a given stream segment. Hybrids between these branches exist. For example, the model TOPMODEL (Beven and Kirkby, 1979) simulates flow through the range of hillslope parameters found in a watershed. The spatial arrangement is not taken into account, only the distribution of values in order to develop a basin response function. It is only a semidistributed model since the statistics of the spatially variable parameters are operated on without regard to location. TOPMODEL falls somewhere between conceptual and distributed with some physical basis. Temporal lumping occurs with aggregation over time of such phenomena as stream flow or rainfall accumulations at 5 minute, hourly, daily, 10-day, monthly, or annual time series. Hydrologic models driven by intensities rather than accumulations are more sensitive to temporal resolution. A small watershed may be sensitive to rainfall time series at 5 minute intervals, whereas a large river basin may be sensitive to only hourly or longer time steps. 6 Chapter 1 Figure 1.4. Model classification according to distributed versus lumped treatment of parameters. Changing spatial resolution of datasets requires some scheme to aggregate parameter values at one resolution to another. Resampling involves taking the value at the center of the larger cell. If the center of the larger cell happens to fall on low/high value, then a large cell area will have a low/high value. Resampling rainfall maps can produce erratic results as the resolution increases in size, as found by Vieux and Farajalla (1996). For the basin and storms tested, as the resolution exceeded 3 km, the simulated hydrograph became erratic because of the resampling effect. Resampling is essentially a lumping process which, in the limit, a single value for the spatial domain results. How to determine which resolution is adequate for capturing the essential information contained in a parameter map for simulating the hydrologic process is taken up in Chapter 4. Farajalla and Vieux (1995) and Vieux and Farajalla (1994) applied information entropy to 1. Distributed hydrologic modeling using gis 7 infiltration parameters and hydraulic roughness to discover the limiting resolution beyond which little more was added in terms of information. Over-sampling a parameter or input map at finer resolution may not add any more information either because the map, or the physical feature, does not contain additional information. Of course variations exist physically, however, these variations may not have any impact at the scale of the modeled domain. Numerical solution of the governing equations in a physics-based model employs discrete elements. The three representative types are finite difference, finite element, and stream tubes. At the level of a computational element, a parameter is regarded as being representative of an average process. Thus, some average property is only valid over the computational element used to represent the process of flow. For example, porosity is a property of the soil medium, but it has no meaning at the level of the pore space itself. From a model perspective, a parameter should be representative of the surface or medium at the scale of the computational element used to solve the governing mathematical equations. This precept is often exaggerated as the modeler selects coarser grid cells, losing physical significance. In other words, runoff depth in a grid cell of 1 km resolution can only be taken as generalization of the actual runoff process and may or may not produce physically realistic model results. Computational resources are easily exceeded when modeling large basins at fine resolution, motivating the need coarser model resolution. One of the great questions facing operational use of distributed hydrologic models for large river basins is how to parameterize sub-grid processes. At the scale of more than a few meters in resolution, runoff depth and velocity have little physical significance. Depending on the areal extent of a river basin and the spatial variability inherent in each parameter, small variations may not be important. Can physically realistic behavior be expected from a model that uses such coarse resolution as to have lost physical significance? We will see in Chapter 6 how hydraulic roughness may be inferred from landuse/cover at the watershed scale. Chapter 4 deals with resolution issues related to information content. Chapter 10 takes up the issue of adjusting parameters for distributed model calibration. 8 1.3 Chapter 1 Mathematical Analogy Physics-based models solve governing equations derived from conservation of mass, momentum and energy. Unlike empirically based models, differential equations are used to describe the flow of water over the land surface or through porous media, or energy balance in the exchange of water vapor through evapotranspiration. Simplifications are made, because the differential equations contain terms for which the accompanying parameters, boundary or initial conditions are unknown, or because the resulting nonlinear equations are difficult to solve. The resulting mathematical analogies are simplifications of the complete form. The full dynamic equations describing the flow of water over the landsurface or in a channel contain gradients that may be negligible under certain conditions. In a mathematical analogy we discard the terms in the equations that are orders of magnitudes less than the others. Simplifications of the full dynamic governing equations give rise to zero inertial, kinematic, and diffusive wave analogies. If the physical character of the hydrologic process is not supported by a particular analogy, then errors result in the physical representation. Difficulties also arise from the simplifications because the terms discarded may have afforded a complete solution while their absence causes mathematical discontinuities. This is particularly true in the kinematic wave analogy, in which changes in parameter values can cause discontinuities, sometimes referred to as shock in the equation solution. Special treatment is required to achieve solution to the kinematic wave analogy of runoff over a spatially variable surface. Vieux et al. (1990) and Vieux (1991) presented such a solution using nodal values of parameters in a finite element solution. This method effectively treats changes in parameter values by interpolating their values across finite elements. The advantage of this approach is that the kinematic wave analogy can be applied to a spatially variable surface without numerical difficulty introduced by the shocks that would otherwise propagate through the system. Vieux and Gaur (1994) presented a distributed watershed model based on this nodal solution using finte elements to represent the drainage network. Chapter 9 presents a detailed description of the solution methodology used by r.water.fea. The naming convention stems from the original concept of a GIS tool resident within the GRASS GIS for simulation of surface runoff in watershed. This model employs a 1. Distributed hydrologic modeling using gis 9 kinematic wave analogy solved with finite elements in space and finite difference in time. This analogy is most suited to watersheds in which backwater is not important. Such watersheds are usually in the upper reaches of major river basins where landsurface gradients dominate flow velocities. The diffusive wave analogy is necessary where backwater effects are important. This is usually in flatter watersheds or low-gradient river systems. Mathematically, the diffusion term smoothes out numerical discontinuities due to changes in parameters typical in most watersheds. CASC2D (Julien and Saghafian, 1991; and Julien, et al., 1995) uses the diffusive wave analogy to simulate flow in a grid cell (raster) representation of a watershed. This model solves the diffusive wave analogy using a finite difference grid corresponding to the grid cell representation of the watershed. The diffusive wave analogy requires additional boundary conditions to obtain a numerical solution in the form of supplying a gradient term at boundaries or other locations. CASC2D essentially uses a more complex mathematical analogy to overcome numerical difficulties, even though in many cases watershed conditions do not have flat slopes requiring this analogy. 1.4 Runoff Processes Two basic flow types can be recognized: overland flow, conceptualized as thin sheet flow before the runoff concentrates in recognized channels, and channel flow, conceptualized as occurring in recognized channels with hydraulic characteristics governing flow depth and velocity. Overland flow is the result of rainfall rates exceeding the infiltration rate of the soil. Surface runoff may be generated either as infiltration excess or saturation excess depending on soil type and topography. 1.4.1 Infiltration Excess (Hortonian) Infiltration excess first identified by Horton is typical in areas where the soils have low infiltration rates and/or the soil is bare. Rain drops striking bare soil surfaces break up soil aggregates, allowing fine particles to clog surface pores. A soil crust of low infiltration rate results particularly where vegetative cover has been removed due to farming or fire. Infiltration excess is generally conceptualized as flow 10 Chapter 1 over the surface in thin sheets. Model representation of overland flow uses this concept of uniform depth over a computational element though it differs from reality where small rivulets and drainage swales convey runoff to the major stream channels. Figure 1.5 shows two zones, one where rainfall, R, exceeds infiltration I (R>I); the other where R < I. In the former, runoff occurs; in the latter, rainfall is infiltrated, and infiltration excess runoff does not occur. However, the amount of infiltrated rainfall may contribute to the watertable, subsurface conditions permitting. Figure 1.5 is a simplified representation, since more than two zones are likely present in a natural watershed. From hill slope to stream channel there may be areas of infiltration excess which runs on to areas where the combination of rainfall and run-on from upslope does not exceed the infiltration rate, resulting in losses to the subsurface. Simulation of infiltration excess requires soil properties and initial soil moisture conditions. Figure 1.6 shows two plots: rainfall intensity as impulses, and infiltration rate as smoothly decreasing with time. The infiltration rate is a potential rate governed by soil properties and the initial degree of saturation. Infiltration excess occurs when the rainfall rate exceeds the infiltration rate. Richards equation fully describes this process using principles of conservation of mass and momentum. The Green and Ampt equation (Green and Ampt, 1911) is a simplification assuming piston flow (no diffusion). Modeling infiltration excess at the watershed scale requires estimation of infiltration parameters from mapped soil properties. Loague (1988) found that the spatial arrangement of soil hydraulic properties at hillslope scales (< 100 m) were more important than rainfall variations. Order of magnitude variation in hydraulic conductivity at length scales on the order of 10 m controlled the runoff response. This would seem to say that infiltration modeling at the river basin scale is impossible unless very detailed spatial patterns of soil properties are known. The other possible conclusion is that not all of this variability is important over large areas. Considering that detailed measurement is not economically feasible over large spatial extent, deriving infiltration rates from soil maps is an attractive alternative. Estimating infiltration parameters from soil maps and associated databases of properties is considered in Chapter 5. 1. Distributed hydrologic modeling using gis Figure 1.5. Schematic diagram of runoff produced by infiltration excess Figure 1.6. Infiltration excess modeled using the Horton equation. 11 12 Chapter 1 1.4.2 Saturation Excess (Dunne) Saturation excess runoff is common in mountainous terrain or watersheds with highly porous surfaces. Under these conditions, overland flow may not be observed. Runoff occurs by infiltrating to a shallow watertable. As the gradient of the watertable steepens, more runoff to stream channels occurs. As the watertable surface intersects the ground surface areas adjacent to the stream channel, the surface saturates. As the saturation zone grows in areal extent, and rain falls on this area, more runoff occurs. Figure 1.7 shows the location of saturation excess first identified by Dunne. Figure 1.7. Schematic diagram of runoff produced by saturation excess. 1.5 GIS Data Structures and Sources New sources of geographic data, often in easily available global datasets, offer tantalizing detail if only they could be used in a hydrologic model designed to take advantage of the tremendous information content. Unfortunately, hydrologic models have not kept pace with many new data sources. Once a particular spatial data 1. Distributed hydrologic modeling using gis 13 source is considered for use in a hydrologic model, data structure, file format, quantization (precision), and error propagation become important. GIS offers efficient algorithms for dealing with most of this data. However, the relevance of the data to hydrologic modeling is often not known without special studies to test whether a new data source provides advantages meriting its use. Chapter 2 deals with the major data types necessary for distributed hydrologic modeling. Depending on the particular watershed, many types of data may require processing before they can be used in a hydrologic model. 1.6 Surface Generation Models often require a surface representation of a parameter that is measured at points. Much work has been done in the area of spatial statistics and the development of Kriging techniques to generate surfaces from point data. In fact, several methods for generating a two-dimensional surface from point data may be enumerated: Linear interpolation Local regression Distance weighting Moving average Splines Kriging The problem with all of these methods when applied to geophysical fields such as rainfall, ground water flow, wind, or soil properties is that the interpolation algorithm may violate some physical aspect. Gradients may be introduced that are a function of the sparseness of the data and/or the interpolation algorithm. Values may be interpolated across distinct zones where natural discontinuities exist. Suppose, for example, that several piezometric levels are measured over an area and that we wish to generate a surface representative of the pressure within the aquifer. Using an inverse distance-weighting scheme, we interpolate pressures in a raster array. We will almost certainly generate a surface that has artifacts of interpolation that violates physical characteristics, viz., gradients are introduced that would indicate flow in directions contrary to the known gradients or flow directions in the aquifer. In fact, a literal interpretation of the interpolated surface may indicate that, at each measured point, pressure decreases in a radial direction away from the 14 Chapter 1 well location. None of the above methods ensure physical correctness in the interpolated surface. Depending on the sampling interval, spatial variability, physical characteristics of the measure, and the interpolation method, the contrariness of the surface to physical or constitutive laws may not be apparent until model results reveal intrinsic errors introduced by the surface generation algorithm. Chapter 3 deals with surface interpolation and hydrologic consequences of interpolation methods. 1.7 Spatial Resolution and Information Content How resolution in space affects hydrologic modeling is of primary importance. The resolution that is necessary to capture the spatial variability is often not addressed in favor of simply using the finest resolution possible. It makes little sense, however, to waste computer resources when a coarser resolution would suffice. We wish to know the resolution that adequately samples the spatial variation in terms of the effects on the hydrologic model and at the scale of interest. This resolution may be coarser than that dictated by visual esthetics of the surface at fine resolution. The question of which resolution suffices for hydrologic purposes is answered in part by testing the quantity of information contained in a data set as a function of resolution. We can stop resampling at finer resolution once the information content ceases to increase. Information entropy, originally developed by communication engineers, can test which resolution is adequate in capturing the spatial variability of the data (Vieux, 1993). We can relate the information content to model performance effects. For example, resampling rainfall at coarser resolution and inputting this into a distributed hydrologic model can produce erratic hydrologic model response (Vieux and Farajalla, 1996). Chapter 4 provides an overview of information theory with an application showing how information entropy is descriptive of spatial variability lost by resampling to coarse resolution. 1.8 Drainage Networks and Resolution Drainage networks are derived from digital elevation models (DEMs) by connecting each cell to its neighbor in the direction of principal slope. DEM resolution has a direct influence on the total 1. Distributed hydrologic modeling using gis 15 drainage length and slope. Too coarse resolution causes an undersampling of the hillslopes and valleys where hilltops are cut off and valleys filled. Two principal effects result: 1. Drainage length is shortened by short-circuiting, 2. Slope is flattened. Though these effects on hydrograph response may be compensating, shorter drainage length accelerates arrival times at the outlet, whereas flatter slopes delay. The influence of DEM grid cell resolution is discussed in Chapter 7, and the effect on hydrograph response is demonstrated in Chapter 11. Input to the distributed hydrologic model consists of rain and/or snow. Depending on the climatic zone considered, rainfall may be the only significant source in the hydrologic cycle. For more mountainous watersheds, we will need to consider both snow and rain not only from the standpoint of input but also in order to model runoff from frozen ground and snowmelt. In this book we focus on rainfall and runoff resulting from infiltration excess. 1.9 Spatially Variable Precipitation Besides satellite, one of the most important sources of spatially distributed rainfall is radar. Spatial and temporal distribution of rainfall is the driving force for both infiltration and saturation excess. In the former case, comparing rainfall intensity with soil infiltration rates determines the rate and location of runoff. One of the most hydrologically significant radar systems in the US is the WSR-88D (popularly known as NEXRAD) radar. Understanding how this system produces rainfall estimates is paramount for deriving accurate input to hydrologic models. Resolution in space and time, errors, quantizing (precision), and availability in real-time or post-analysis will be taken up in Chapter 8. 1.10 r.water.fea: A Distributed Hydrologic Model The model r.water.fea was developed for the U.S. Army Corps of Engineers, Construction Engineering Research Laboratory, Champaign, Illinois (USA-CERL). This model is a part of the Geographic Information Systems (GIS), GRASS (Geographic Resource Analysis Support System). A description of the interface between GIS and the finite element and finite difference algorithms to 16 Chapter 1 solve the kinematic wave equations are examined in detail in Chapter 9. Assembly of finite elements representing the drainage network produces a system of equations solved in time. The resulting solution is the hydrograph at selected stream nodes, cumulative infiltration, and runoff depth in each grid cell. 1.11 Distributed Model Calibration Once the assembly of input and parameter maps for distributed hydrologic model is completed, the model must still be calibrated. The argument that physics-based models do not need calibration presupposes perfect knowledge of the parameter values and location as well as rainfall input. This is clearly not the case. Besides the parameter and input uncertainty, there are resolution dependencies as presented by Vieux et al. (1993). Lumped modelers have long argued that there are too many degrees of freedom in distributed modeling vis-a-vis the number of observations. This concern does not take into account that if we know the spatial pattern of a parameter, we can adjust its magnitude while preserving its relative variation in space. This calibration procedure can be performed manually by applying scalar multipliers or additive constants to parameter maps until the desired match between simulated and observed is obtained. Automatic calibration of non-physics-based models must rely on optimization such as the shuffled complex evolution method (Duan, et al., 1992). Physics-based models have the advantage that there are governing differential equations. This fact may be exploited using the adjoint technique, which has enjoyed success in meteorology in retrieving initial conditions for atmospheric models. Chapter 10 covers the manual and automatic calibration of the r.water.fea model. The fact that we can invert the differential equations in the presence of data dismisses the concern that there are too many degrees of freedom and unique solutions are not possible. There is the limitation that the problem is ill-conditioned, meaning that optimal parameters may exist but search algorithms may not efficiently retrieve them. In any case, it is clear that multiple minima do not exist, at least in the cases examined, in spite of the difficulty of retrieving the optimal solution automatically. 1. Distributed hydrologic modeling using gis 1.12 17 Case Studies and Concluding Remarks Chapter 11 contains case studies showing the influence of lumping spatially variable parameters. If there is no effect due to lumping, the spatial variation has little or no impact on the simulation results. Resolution effects on hydrograph response are also demonstrated, showing influence of drainage length and slope. These case studies are presented for a series of several storms using radar input for the 2400 km2 Illinois River basin straddling the border between Oklahoma and Arkansas. Ideally, this book raises more questions than it answers. Depending on the reader’s interest, the techniques described should have wider application than just the subset of hydrologic processes that are addressed in the following chapter. They have been used to develop scientific principles of distributed hydrologic modeling using GIS. In an effort to make the book general, techniques described may be applied using many different GIS packages. With this framework in mind, the principles are general to distributed hydrologic modeling without the restriction to any particular proprietary GIS routine or software. 1.13 1. 2. 3. 4. 5. 6. 7. 8. References ASCE (1999), GIS Modules and Distributed Models of the Watershed, Report, ASCE Task Committee GIS Modules and Distributed Models of the Watershed, P.A. DeBarry, R.G. Quimpo, eds. American Society of Civil Engineers, Reston, VA., p. 120. Beven, K.J. and M.J. Kirkby (1979), “A physically based variable contributing area model of basin hydrology.” Hydrologic Sciences Bulletin, 240(1), pp.43-69. Duan, Q., Sorooshian, S.S., and Gupta, V.K. (1992), “Effective and efficient global optimization for conceptual rainfall runoff models.” Water Resources Research, 28(4), pp.1015-1031. Desconnets, J.-C., B.E. Vieux, and B. Cappelaere, F. Delclaux (1996), “A GIS for hydrologic modelling in the semi-arid, HAPEX-Sahel experiment area of Niger Africa.” Transactions in GIS, 1(2), pp. 82-94. Farajalla, N.S. and B.E. Vieux (1995). “Capturing the essential spatial variability in distributed hydrologic modeling: Infiltration parameters.” J. of Hydrological Processes, 8(1), Jan., pp. 55-68. Green, W.H. and Ampt, G.A. (1911). “Studies in soil physics I: The flow of air and water through soils.” Journal of Agricultural Science, 4, pp.1-24. HEC, (2000), Hydrologic Modeling System: HEC-HMS, U.S. Army Corps of Engineers Hydrologic Engineering Center, Davis California. Julien, P.Y. and B. Saghafian (1991), “CASC2D User’s Manual”. Civil Engineering Report, Dept. of Civil Engineering, Colorado State University, Fort Collins, Colorado 80523. 18 9. 10. 11. 12. 13. 14. 15. 16. 17. Chapter 1 Julien, P.Y., B. Saghafian, and F.L. Ogden (1995), “Raster-based hydrological modeling of spatially-varied surface runoff.” Water Resources Bulletin, AWRA, 31(3), June, pp. 523-536. Loague, K.M. (1988), “Impact of rainfall and soil hydraulic property information on runoff predictions at the hillslope scale.” Water Resources Research, 24(9), pp.15011510. Vieux, B.E., V.F. Bralts, L.J. Segerlind and R.B. Wallace (1990), "Finite element watershed modeling: One-dimensional elements." ASCE J. of Water Resources Management Planning, 116(6), November/December, pp. 803-819. Vieux, B.E. (1991), "Geographic information systems and non-point source water quality modelling" J. of Hydrological Processes, John Wiley & Sons, Ltd., Chichester, Sussex England, Jan., 5, pp. 110-123. (Invited paper for a special issue on digital terrain modeling and GIS.) Vieux, B.E. (1993), "DEM aggregation and smoothing effects on surface runoff modeling." ASCE J. of Computing in Civil Engineering, Special Issue on Geographic Information Analysis, 7(3), Jul., pp. 310-338. Vieux, B.E., N.S. Farajalla, and N. Gaur (1993), "Integrated GIS and distributed stormwater modeling." Proceedings of the Second Int. Conference on GIS and Environmental Modeling, National Center for Geographic Information Analysis, Breckenridge, Colorado, September, pp. 26-29. Vieux, B.E. and N.S. Farajalla (1994), "Capturing the essential spatial variability in distributed hydrologic modeling: Hydraulic roughness." J. of Hydrological Processes, 8, pp. 221-236. Vieux, B.E. and N.S. Farajalla (1996), "Temporal and spatial aggregation of NEXRAD rainfall estimates on distributed hydrologic modelling." Proceedings of Third International Conference on GIS and Environmental Modeling, NCGIA, Jan. 21-25, pp. 199-208. Vieux, B.E. and Gaur, N. (1994). “Finite element modeling of storm water runoff using GRASS GIS”, Microcomputers in Civil Engineering, 9(4), pp.263-270.