INSTRUCTIONS TO AUTHORS FOR THE PREPARATION
advertisement

The Numerical Solutions of System of General First-order Stiff Differential
Equations by Three Types of Methods
Ali KONURALP* Necdet BİLDİK*
*Celal Bayar University, Faculty of Art and Sciences,Department of Mathematics, Manisa 45047
Turkiye (Tel: 00905055770937; e-mail: ali.konuralp@bayar.edu.tr necdet.bildik@bayar.edu.tr ).
Abstract: The Padé approximation, The Rosenbrock method and The Adomian’s decomposition method have been applied to
solve many functional equations. We presented initial value problems of system of stiff differential equations by considering
these methods and also compared solutions with large calculations. Rosenbrock methods turned out to be rather successful for
integrating small systems with inexpensive function and Jacobi evaluations. Our computational study shows how to use and
apply the methods to the specific initial value problems of the two dimensional systems.
Keywords: Linear Systems, The Padé approximation Method, Rosenbrock Method, The Adomian’s
Decomposition Method, Stiff differential equations.
1. INTRODUCTION
The goal of this paper is to implement the Padé
approximation method, Rosenbrock method and Adomian’s
method to the system of stiff differential equations, which are
often encounter in physical and electrical circuits problems.
Most of the system of ordinary differential equations do not
solve analytically. So some numerical techniques prefer to
consider overcoming this type of problem.
In recent years, much research has been focused on numerical
solution of the system of differential equations by using
technique of Adomian’s decomposition methods. In the
literature, the Adomian’s decomposition is used to find
approximate numerical and analytic solutions of a wide class
of linear or nonlinear differential equations [Adomian
1994,1998; Kaya 2004; Repaci 1990].
Let us consider the problems in the following system of
ordinary differential equations:
dyi (t )
fi (t , y1 (t ), y2 (t ), , yk (t )) , y (t ) |
(1)
i
t 0
i
dt
where i is a specified constant vector, yi (t ) is the solution
vector for i 1, 2, , k . In the decomposition method, (1) is
approximated
by
the
operators
in
the
form:
Lyi (t ) fi (t , y1 (t ), y2 (t ), , yk (t )) where L is the first
order operator defined by L d / dt and i 1, 2, , k .
1
Assuming the inverse operator of L is L
1
invertible and denoted by L (.)
1
L
which is
t
t0
(.) dt , then applying
to L y (t ) yields
i
1
1
The basic purpose of this paper is to illustrate advantages of
using Rosenbrock method over the other methods namely
Padé approximation method and Adomian’s decomposition
method in terms of numerical comparisons. However, it shall
be considered the Rosenbrock method [Hairer Wanner 1996;
Rosenbrock 1960; Schmitt and Weiner 2004; Zhao et al.
2005], Padé approximation method [Baker and Morris 1996],
and the Adomian’s decomposition method in order to solve
the system of first order differential equations.
L Ly (t ) L f (t , y (t ), y (t ), , y (t ))
i
i
1
2
k
where i 1, 2, , k . Thus
1
y (t ) y (t ) L f (t , y (t ), y (t ), , y (t )) . Hence the
i
i 0
i
1
2
k
decomposition method consists of representing yi (t ) in the
decomposition series form given by
yi (t ) fi , n (t , y1 (t ), y2 (t ), , yk (t ))
n0
2. ANALYSIS OF THE NUMERICAL METHODS
where the components yi , n , n1 and i 1,2, , k can be
computed readily in a recursive manner. Then the series
solution is obtained as
2.1 Adomian’s Decomposition Method
Suppose k is a positive integer and f1 , f 2 ,
, f k are k real
continuous functions defined on some domain G . To obtain
k differentiable functions y1 , y2 , , yk defined on the
interval I such that (t , y1 (t ), y2 (t ),
, yk (t )) G for t I .
yi (t ) yi ,0 (t ) {L1 fi, n (t , y1 (t ), y2 (t ), , yk (t ))} .
n 1
For a detailed explanation of decomposition method and a
general formula of Adomian polynomials, we refer reader to
[Adomian 1994].
numerator coefficients and M independent denominator
coefficients which makes L M 1 unknown coefficients in
all. This number suggests that normally the [ L / M ] must to
2
2.2 Introduction to Rosenbrock Method
The Rosenbrock method is a zeroth order approximating
search algorithm that does not require any derivatives of the
desired function, just only simple evaluations of the objective
function are used. This was published by Rosenbrock in the
60th [Rosenbrock 1960]. This method is particularly well
suited when the objective function does not require a great
deal of computing power. In such a case, it is useless to use
very complicated optimization algorithms which are needed
to loose more spare time in the optimization calculations,
instead of making a little bit more evaluations of the
objective function that will lead, at the end, to a shorter
calculation time. The numerical solution of systems of
ordinary differential equation of the form, y ( x) f ( y ( x)) ,
m
m
m
y ( x0 ) y0 where y :
and f :
. The
Rosenbrock method searches to look for the solution of the
s
form yn 1 yn h ci ki where the corrections k i are
i 1
found by solving s linear equations that generalize the
structure in
i 1
k 1
(1 h f ) ki h f y0 i j k j h f i j k j , i 1, ..., s (2)
j 1
j 1
f
Here Jacobi matrix is denoted by f ( )( yn ) . The
y
coefficients , ci , ij , and ij
are fixed constants
independent of the problem. If ij 0 , this is simply a
Runge-Kutta scheme. Then (2) can be solved successively for
k1 , k2 ,... .
L M
3
fit the power series through the orders 1, x, x , x ,..., x
in the notion of formal power series
L
i 0 1 x L x O ( x L M 1 ) (4)
ci x
0 1 x M x M
i 0
Substituting (4) in (3), then
M
2
L
L M 1
( x x )(c c x ) x x x O ( x
)
0 1
M
0 1
0 1
2
L
L 1
L2
Equating the coefficients of x , x
then
c
c
M L M 1
M 1 L M 2
(5)
,..., x L M in (5),
c
0
0 L 1
M cL M 2 M 1cL M 3 0 cL 2 0
…
(6)
c
c
c
0
M L
M 1 L 1
0 L M
are obtained. If j 0 , then c j 0 is defined for
consistency. Since 0 1 , the system which is given by (6)
become a set of M linear equations for M unknown
denominator coefficients as follows:
cL M
cL M 1 cL M 2 cL M 3
cL 1
c
c
cL 1 M 1
L M 2 cL M 3 cL M 4
L 2
cL M 3 cL M 4 cL M 5
cL 2 M 2 cL 3
cL M 1 cL M 1 cL M 1
cL M
cL M 1 1
Thus
i
can be calculated easily. The numerator
coefficients 0 , 1 ,
equating
the
, L follow immediately from (5) by
coefficients
1, x, x 2 , x3 ,..., x L ,
then
0 c0 , 1 c1 1c0 , 2 c2 1c1 2 c0 , … ,
min( L, M )
2.3 Padé Approximation Method
Suppose that f ( x) has a Maclaurin expansion about the zero
such as f ( x ) ci xi where ci 0,1,2, .A Padé
i 0
approximant is a rational function
x 2 x2 L x L
(3)
Pf [ L / M ] 0 1
0 1 x 2 x 2 M x M
which has a Maclaurin expansion which agrees with power
series as far as possible. Notice that Pf has a quotient of
polynomials, which has L 1 terms numerator coefficients
and M 1 denominator coefficients. There is a more or less
irrelevant common factor between them, and for definiteness
we take 0 1 . This choice turns out to be an essential part
of the precise definition and Pf is here conventional notation
with this choice for 0 . So there are L 1 independent
L cL
i cL i are obtained. Thus normally it is
i 1
determined the Padé numerator and denominator and called
Padé equations. So it can be constructed a [ L / M ] Padé
approximant, which agrees with f ( x)
c x
i
i
through
i 0
order x L M [Baker Morris 1996; Corliss and Chang 1982;
Hirayama 2000]. To give clear overview of the
methodology let us consider several examples in the
following section.
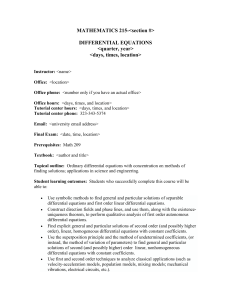
3. APPLICATIONS AND NUMERICAL RESULTS
Example 1. Let us to consider the following system of
differential equation as a test problem:
y1 10 y1 6 y2
and y2 13.5 y1 10 y2
(7)
with initial conditions y1 (0) 4e 3 and y2 (0) 0 where
0 x 1 . The exact solution of this problem is
y1 ( x) 23 e(e x e 19 x ) , y2 ( x) e(e x e19 x ) . Firstly we
solve the initial value problem with Padé approximation
method. The aim of this method is to find series expansion
using by matrix representation as
6 y1 0
y1 ' 10
y '
y 0
13.5
10
2
2
where initial conditions y1 (0) 4e 3 and y2 (0) 0 is
denoted as y1,0 y1 (0) and y2,0 y2 (0) . Using the initial
conditions, the solutions of (7) can be considered as
y1 ( x) y0,1 1 x 4e / 3 1 x
y2 ( x) y0,2 2 x 2 x
Substituting
terms, then
(8)
(8) into (7) and neglecting the higher order
1 40e / 3 101 x 6 2 x 0
2 108e / 6 271 x / 2 10 2 x 0
and
4e
3
3.6243757700
1.9107818470
1.5242339940
1.3485653230
1.2156527780
x\y2
Exact
0.0
0.1
0.2
0.3
0.4
0.0000000000
2.0530334510
2.1647308650
2.0046574300
1.8207584320
y1 Absolute Error
(Adomians)
0.0000E+00
4.4408E-16
2.4424E-15
5.0448E-11
3.5918E-07
x
0.01
0.02
0.03
0.04
0.05
8491781521e
30240
y1 32 y1 66 y2 2 x / 3 2 / 3
49659541e
280
x8
2304912127 e
3888
x9
3065533128901e
2721600
x10 O( x11 )
with initial conditions y1 (0) 1 / 3 and y2 (0) 1 / 3 such
that 0 x 1 . The exact solution of this problem is
y1 ( x)
2
3
4
3.624375770 2.057914264 x 129.6082474 x 73.74538199 x 348.9539654 x 203.1856237 x
2
3
4
1 9.432201738 x 39.58217461x 93.52709832 x 126.3975849 x 79.78502234 x
5
2
3
x 23 e x 13 e 100 x
y2 ( x) 13 x 13 e x 23 e 100 x
e 8 1991899369e 9
e 10
x7 11794141
x 2240 x 3406147921
x O( x11 )
28
2016
As if one desires to solve the problem in the restricted
domain, 0 x 1 , where no delayed time is minimum, it can
also be taken more terms to get high accuracies with any
computer program as Mathematica or others. The Padé
approximation solutions of system (7), can be written as
y1 [ 5 5 ]( x )
To solve the initial value problem with Padé
Approximation Method, the analogue procedure which was
used Example 1, then The Padé approximation solutions of
system (9), can be written as
y1 [ 5 5 ]( x)
2
3
2
48.92907290 x 20.92483208 x 413.5655807 x
2
3
169.3803363 x
3
4
2
3
4
1 49.77419745x 1100.889544 x 13693.77341 x 97315.37512 x 322673.3475 x
5
5
5
136.1017021x
4
4
0.3333333333 49.92473248x 359.7697630x 13875.94938x 30787.42799x 340369.8101x
2
y2 [ 5 5 ]( x )
(9)
y2 66 y1 133 y2 x / 3 1/ 3
e 5 130683e 6
y2 ( x) 18ex 180ex 2 1143ex3 5430ex 4 412683
x 2 x
20
Absolute Error
(Rosenbrock)
0.0000000012
0.0000001871
0.0000001194
0.0000001065
0.0000000235
Absolute Error
(Rosenbrock)
0.0000000000
0.0000002799
0.0000001782
0.0000001591
0.0000000340
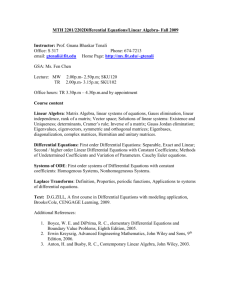
Example 2. We consider the system
11
e 2
e 3
e 4 123805e 6
e 7
403e x 362
x 6860
x 65161
x 9 x 44693587
x
3
9
18
378
0.0
0.1
0.2
0.3
0.4
Absolute Error
(Padé)
0.0000000000
0.0000000330
0.0000131900
0.0002560760
0.0015603340
Absolute Error
(Padé)
0.0000000000
0.0000000500
0.0000204850
0.0003933590
0.0023685610
y2 Absolute Error
(Adomians)
0.0000E+00
4.44089E-16
2.22045E-15
7.58580E-11
5.38771E-07
solutions and the approximate solution of Adomian’s decomposition
method considering by 30 terms.
are obtained where Q 1 ( x) and Q2 ( x) are the error terms
with respect to related equation where its solution is readily
obtained y1 ( x) 4e / 3 40e x / 3 and y2 ( x) 18ex . With the
same iterative procedure, it is found that we have power
y1 ( x)
Exact
Table 1. Comparison of Padé and Rosenbrock approximate
1 40e / 3 Q1 ( x) 0
2 108e / 6 Q2 ( x) 0
series of order x
x\y1
y2 [ 5 5 ]( x)
5
1 9.572343585 x 40.67578447 x 97.11894158 x 132.3740297 x 84.12285991x
3
4
0.3333333333-50.01912345x 373.1626781x -13931.77445x +33749.15668x -337628.9958x
2
3
4
1 49.94262964x 1108.513962 x 13839.31067 x 98725.83778 x 328651.2020 x
5
where it is constructed y [5 / 5] and y [5 / 5] of order 11. At
1
2
last, the solutions of the system of differential equation by
using Adomian’s method are
e 3
e 4
e 5
e 6
y1 43e / 403e x 3623 e x2 6890
x 65161
x 123805
x 23522941
x
9
18
9
540
2
3
4 412683 5 130683 6
y2 18ex 180ex 1143ex 5430ex
ex
ex
20
2
Regarding to these approximate solutions, it is illustrated
with tables in which the errors can be seen as follows:
where it is constructed y [5 / 5] and y [5 / 5] of order 11.
1
2
Finally, the Adomian’s decomposition method yields
1 100
4999 2 499999 3 49999999 4 4999999999 5 499999999999 6
y1
x
x
x
x
x
x
3 3
3
9
36
180
1080
1 200 19999 2 1999999 3 199999999 4 19999999999 5 19999999999999 6
y2
x
x
x
x
x
x
3 3
6
18
72
360
2160
Regarding to these approximate solutions, it is illustrated
with table in which the errors can be seen as follows:
5
5
x\y1
Exact
0.0
0.1
0.2
0.3
0.4
0.3333333334
0.6698764787
0.6791538347
0.6938788138
0.7135466974
x \ y2
Exact
0.0
0.1
0.2
0.3
0.4
0.3333333334
-0.3349155394
-0.3395769163
-0.3469394069
-0.3567733486
y1 Absolute Error
(Adomians)
1.11022E-16
3.33067E-16
3.33067E-16
1.77636E-15
1.77636E-15
x
0.01
0.02
0.03
0.04
0.05
Absolute Error
(Padé)
Absolute Error
(Rosenbrock)
0.0000000001
0.0011362443
0.0148117320
0.0347299717
0.0492348969
Absolute Error
(Padé)
0.0000000001
0.0024447172
0.0337939568
0.0862218254
0.1369962953
y2AbsoluteError
(Adomians)
0.176194E-12
0.486352E-12
0.600581E-12
0.642772E-12
0.658502E-1
0.0000000001
0.0000000035
0.0000000021
0.0000002301
0.0000000012
Absolute Error
(Rosenbrock)
0.0000000001
0.0000000071
0.0000000066
0.0000001129
0.0000000010
Table 2. Comparison of Padé and Rosenbrock approximate
solutions and the approximate solution of Adomian’s
decomposition method considering by 40 terms.
6. CONCLUSIONS
In this paper, we compare the illustrated examples of the
system of linear stiff differential equations by Rosenbrock,
Pade Approximation and Adomian’s Decomposition Method.
For illustration purposes, we chose two examples to get the
best computational accuracy. It may conclude that
Rosenbrock Method is efficient in finding approximate
solution for large classes of problems. The numerical
solutions in the tables are clearly indicated that how the
Rosenbrock technique obtains efficient results much closer to
the exact solutions and also very convenient to use comparing
with the Adomian’s and Padé approximation method. The
solution is rapidly convergent by using this method. The
other two methods converge to the exact solution after the 30
terms approximation.
REFERENCES
Adomian, G. (1994) Solving Frontier Problems of Physics:
Decomposition method. Kluwer, Boston, MA.
Adomian, G. (1998) A Review of the Decomposition Method
in Applied Mathematics. J. Math. Anal. Appl. 135, 501544.
Baker G.A., Graves-Morris (1996) Essentials of Padé
Approximations. Cambridge.
Corliss G., Chang Y.F. (1982) Solving Ordinary Differential
Equations Using Taylor Series. ACM Trans. Math. Soft. 8.
Hairer E., Wanner G. (1996) Solving Ordinary Differential
Equations II, Stiff and Differential-Algebraic Equations.
Springer-Verlag, Berlin.
Hirayama H. (2000) Arbitrary Order and A-Stable Numerical
Method for Solving Algebraic Ordinary Differential
Equation by Power Series. 2nd International Conference
on Mathematics and Computers in Physics,
Vouliagmeni, Athens, Greece.
Kaya D. (2004) A Reliable Method for the Numerical
Solution of the Kinetics Problem. Appl. Math. Comp.
156, 261-270.
Repaci A. (1990) Nonlinear Dynamical Systems: On the
Accuracy of Adomian’s Decomposition Method. Appl.
Math. Lett. 3, 35-39.
Rosenbrock, H.H. (1960) An automatic method for finding
the greatest or least value of a function. Comp. J. 3, 175184.
Schmitt B.A., Weiner R. (2004) Parallel Two Step Wmethods with Peer Variables”, SIAM J. Numer. Anal. 42
265-282.
Zhao J.J., Xu Y., Dong S.Y, Liu M.Z. (2005) Stability of
Rosenbrock Methods for the Neutral-Delay DifferentialAlgebraic Equations. Applied Mathematics and
Computation. 168, 1128-1144.