FOAM-RUBBER SAMPLE VOLUME MEASURING
advertisement

380
FOAM-RUBBER SAMPLE VOLUME MEASURING
S. Yu. Yakovlev1, I. V. Safonov1
1Moscow
Engineering Physics Institute (State University), Kashirskoe sh. 31, Moscow, 115408,
Russia, {Yakovlev.Serge; Ilia.Safonov}@gmail.com
For industrial quality control of foam-rubber material, it is required to measure volume
of the sample. A new approach is proposed to measure sample volume by images of
sample faces. Faces images are got via flatbed scanner. The faces images are processed
and the sample is approximated by hexahedron. Then the sample volume is calculated
analytically. Also we proposed an iterative approach based on splitting geometrical
model of the sample into several smaller hexahedrons. The test results have shown that
results of volume measurements obtained by proposed approach coincide well with ones
obtained by the standard method. However, repeatability and reproducibility of
measurements is better for proposed algorithm, and it is faster.
Introduction
Many modern industries use image processing
systems to control workflows and quality of
materials.
Chemical industries producing
porous material such as elastic foam-rubber
exploit a quality control system [1], where a
flatbed scanner is used to capture images. One
of key parameters influencing on foam-rubber
quality and cost is so-called apparent density,
i.e. a ratio of a porous sample mass to its
volume.
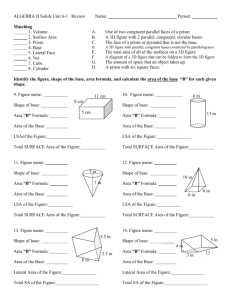
To measure the apparent density, test samples
in the form close to parallelepiped are cut out
the produced material [2]. Electronic balance
is used to measure the sample mass with high
precision. However, it is hard to estimate the
sample volume precisely enough by traditional
means, because the material is elastic, and it is
impossible to cut an ideal parallelepiped, using
existing and inexpensive tools. With cutting,
foam-rubber is subject to resiliences, sample
faces are not ideal and not orthogonal to each
other (Fig. 1).
Measurement of porous material sample linear
sizes is a conventional method to calculate its
volume. Such measurements are carried out by
a ruler or a thickness gage [3]. Then the
volume is calculated by multiplying linear
sizes. Since a sample is not an ideal
parallelepiped and because of human factor,
repeatability
and
reproducibility
of
measurements are not so good and the
measurement error can reach 5% that is
unacceptable in many cases.
Fig. 1. Foam-rubber sample faces images
We propose a novel algorithm to measure a
sample volume, using its faces images, which
are obtained by uncovered CCD flatbed
scanner. Six sample faces are scanned in a
fixed order, which allows identifying uniquely
face vertices and edges with recovering a 3D
model of the sample.
Sample volume evaluation by its faces
images
There are two stages in the proposed volume
measurement algorithm:
381
Faces images processing and vertices
and edges identification in the faces;
Recovering a 3D model of the sample.
2.1. Face Processing
After a face image was captured, one carries
out its binarization with a threshold calculated
automatically by the Otsu criterion [4]. It
results in one wide area object being the face
image and a lot of small objects representing
noise in the task framework. These small
objects are easily rejected by their areas. There
may be holes in the projection binary image,
which are to be filled. Morphological close
operation [5] allows to smooth the object
contours (Fig. 2). In the scope of the paper,
face projection means its binary image unless
otherwise indicated.
There are four sides of every sample face
projection, which correspond to the sample
edges. Further, “edge” term means the sample
edge unless otherwise indicated.
At the next algorithm stage, a face projection
is approximated by a tetragon. For that, we
detect the projection contour and then classify
the contour points according to their belonging
to one of face projection edges.
The contour is detected by the Inner Boundary
Tracing algorithm [6]. The detection results in
a sequence of object pixels located on the
contour. The sequence of two-dimensional
coordinates of pixels located on the object
contour is considered as a sequence of
perimeter points (Fig. 3): P pti , i 1, N ,
where pt i is a couple of the i-th perimeter
point coordinates and N is the number of
perimeter points.
Classification of perimeter points means their
division into four disjoint subsequences, each
of them representing one edge. For that, we
detect corner points of the face. Then the
sequence of points located between two corner
points describes the corresponding edge.
Let us define the corner point term. Let
pti P , i 1, N . We introduce function
angle ( pti ) calculating the angle included
between vectors pti ptk and ptm pti ,
where pt k P and pt m P . Index
k min j ,
j [1, i ) ,
where
and
pti ptk Lang . Index m max j , where
pt m pt i Lang . Here Lang is
the parameter that is specified as much as
possible acceptable length of considered
vector (Fig. 4).
Face projection corners are fuzzy: they are
chamfered and rounded. So, we assume that
the projection point pt ang is a corner point if
the
following
condition
holds:
angle ( ptang ) min angle ( pti ) . Here pt i lies
inside the circle which center corresponds to
physical location of the corner on the face
projection, and the radius is chosen such that
the circle does not intersect the circles around
other corners of the face projection.
j (i, N ] , and
ptk
Lang
pti
Lang
ptm
Fig. 4. Determination of angle in point pti
We propose the following algorithm to find
corner points. Perimeter points are analyzed
step by step with the pre-defined step
S Lang . Index l of the next point is
l min j ,
j (i, N ] ,
determined
as
Fig. 3. Face contour detection
ptl pti S , where pt i and ptl are the
current and the next points, respectively.
Points are analyzed until the angle value
becomes less a pre-defined threshold.
382
Then the corner point is localized. The found
corner point is put into the set of found corner
points, and the next corner point is looked for.
After all corner points were found, the
perimeter is divided into four subsequences
corresponding to edges. To avoid errors
caused by inaccurate localization of corner
points, some of points (corresponding to about
2% of edge length) at the beginning and at the
end of every subsequences are dropped.
After face projection perimeter points
classification, the found subsequences are
approximated by straight lines, using the Total
Least Squares (TLS) method [7]. After the
approximation, we find the tetragon vertices,
which describe the face projection. Further, the
built geometric model of the face projection is
used to compute face parameters: lengths of
edges and angles included between edges.
F
G
E
H
B
C
A
D
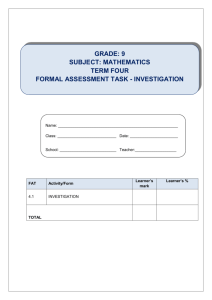
Fig. 6. Geometric model of the investigated sample of
porous material
Each of the pyramids is described by three
edges exiting from the same vertex and angles
included between them. Inner pyramid
parameters are calculated by the known
parameters of faces. Every pyramid volume is
computed analytically. The sample volume is
the sum of these pyramids volumes.
3D model recovery
Iterative approach
After approximation of face projections by
tetragons, lengths of the corresponding edges
of adjacent faces may differ. The difference is
explained by errors introduced by scanning,
binarization and approximation. Therefore,
correction of edge lengths should be one of the
algorithm steps.
Correction of edge lengths is carried out for
every couple of corresponding edges.
Arithmetic mean value of their lengths is taken
as a new length. Then geometric models of
adjacent faces are processed separately. After
the correction of edge lengths, parameters of
projection geometric models are re-calculated.
Thus, at this stage, we have six face
projections approximated by tetragons, which
define the sample. For every face projection
model, we have calculated lengths of edges
and angles included between them. An
irregular hexahedron is a 3D model of the
considered solid. To compute the hexahedron
volume, every face model is divided on the
diagonal into two parts, so that we obtain four
outer pyramids ABDE, CBDG, EGHD, EFGB
and one inner pyramid DEGB (Fig. 6).
The algorithm described above approximates
the sample by an irregular hexahedron. This
approach allows taking into account that faces
are not perpendicular to each other. However,
faces are not ideal planes. Sample model is
partitioned
to
decrease
the
volume
computation error. Ever part volume is
computed separately, and the sample volume
is resulted from the sum of the part volumes.
With the sample model partition, every edge of
every face projection geometric model is
divided into two parts. For that, the middle of
ever edge is found. The subsequence of
perimeter points representing the edge is
divided into two parts too. As the edge
partition result, a face projection is divided
into four parts. Then each of them is
approximated by a tetragon, according with
the algorithm described above. Since every
face projection is partitioned, the hexahedron
is divided into eight parts, each of them being
hexahedron too. Reaching a prescribed
accuracy, exceeding a prescribed maximum of
iterations, and/or decreasing a face edge length
below a prescribed length threshold serve as
the iterative algorithm stop criteria. The last
criterion is connected with physical features of
383
an investigated object: minimal edge length
depends on the sample pore dimension.
difference is calculated by the formula:
Results
average volume calculated in conventional
way and V a is the volume calculated in the
proposed automatic way. One can see that
volume measurement results obtained in the
automatic way almost coincide with the results
obtained in the conventional way: the relative
error does not exceed 1.5%.
Test series for five samples were carried out to
investigate
the
measurement
process
convergence. Within every series, a sample
volume was measured 30 times by the
considered system. For comparison, similar
sample measurement series were carried out in
the conventional way.
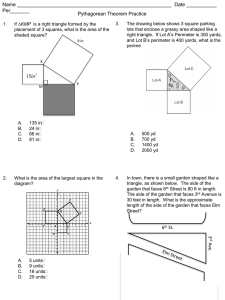
Fig. 8 shows the histogram of relative error of
the measurements. The proposed automatic
way of measuring the volume of the same
sample provides the relative error not
exceeding 0.5%.
Testing of the proposed algorithm was carried
out in industrial laboratory conditions, with the
system consisting of the flatbed scanner HP
Scanjet 3670 and PC Pentium 4 (3,2 GHz,
1GB RAM). As tested objects, we used
samples, which form is close to parallelepiped
and which dimensions are (1003, 1003,
503) mm. Faces of samples are scanned in
grayscale mode with spatial resolution 300
dpi.
30 objects were used with the algorithm
testing. Every object volume was preliminarily
measured by three specialists in conventional
way (using a thickness gage). Then the data
were assumed to be lost, and every object
volume was measured by the considered
system.
D 2 Vm Va /(Vm Va ) , where V m
is the
Conclusion
0,016
0,014
0,012
0,010
D 0,008
0,006
0,004
0,002
0,000
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
Sample #
Fig. 7. Normalized difference between sample volume
values obtained in automatic and conventional ways
0,03
0,025
0,02
Conventional
D 0,015
Proposed
0,01
0,005
0
1
2
3
4
5
Sam ple #
Fig. 8. Histogram of relative error vs. measurement
series number
Fig. 7 shows the normalized difference
between sample volume values obtained in
automatic and conventional ways versus the
measured sample number. The normalized
The paper goal is to describe proposed
algorithm to measure the volume of a porous
material sample, which form is close to
parallelepiped. The algorithm is integrated into
the existing system for elastic foam-rubber
quality control, where samples images are
captured by a flatbed scanner. In the proposed
algorithm, 6 sample faces are scanned and
processed preliminarily to find their vertices
and edges. Then, the sample is approximated
by a hexahedron, which volume is calculated
analytically. Also we proposed an iterative
approach based on splitting geometrical model
of the sample into several smaller
hexahedrons.
The algorithm trials carried out in industrial
laboratory conditions show that measurement
results obtained in the proposed automatic way
almost coincide with the results obtained in the
conventional way being an industry standard.
However, the proposed method provides better
repeatability
and
reproducibility
of
measurement system. Taking into account that
the software implementing the proposed
algorithm allows processing 4 samples
384
concurrently, the measurement rate increases
by a factor of more than 5. Possibility of
retrospective analysis and documentation of
measurement results are additional advantages
of the proposed and implemented approach.
Quality control system using the proposed
algorithm is deployed and exploited
successfully in several chemical enterprises.
References
1. I. V. Safonov, G. N. Mavrin, K. A. Kryzhanovsky.
Segmentation of convex cells with partially
undefined boundaries. Pattern recognition and image
analysis, vol.16, No.1, 2006, pp.46-49.
2. ISO 845 : 1977. Cellular plastics and rubbers
Determination of apparent density.
3. ISO 1923 : 1981. Cellular Plastics and Rubbers Determination of Linear Dimensions.
4. K. Ch. Lin. On improvement of the computation
speed of Otsu’s image thresholding. Journal of
Electronic Imaging 14(2), Apr–Jun 2005.
5. L. G. Shapiro, G. C. Stockman. Computer Vision.
Prentice Hall, 2001.
6. M. Sonka, V. Hlavac and R. Boyle. Image
Processing, Analysis, and Machine Vision. An
Imprint of Brooks and Cole Publishing, 1998.
7. V. Vezhnevets, A. Degtiareva. Line fitting or
methods of approximation of points set by line.
Graphics and multimedia online, 2003. (In Russian)