The purpose of this experiment was to calibrate a
advertisement

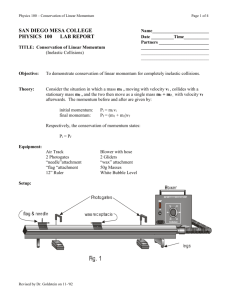
Jason Fong 702847140 date of experiment: 10-24-00 partner: Rosanne Hong Physics 4AL Lab 5 Experiment 3 Abstract and Introduction The purpose of this experiment was to investigate the conservation of energy in a mass and spring system. The resulting graph of the data showed that the system behaved as expected for a system that conserves energy. There was a small energy loss due to air resistance, the slight friction with the track, and energy lost from the springs. The experiment was performed using a glider on an air track. The glider had a spring attached to each end, and the other ends of each of the springs were attached to the ends of the air track. As the glider was set into motion, measurements were taken for the time elapsed for the glider to travel across 0.004 m intervals. The time measurements were used to calculate the kinetic energy of the glider at the center of each interval, and the distance from equilibrium of the glider was used to calculate the potential energy at the center of each interval. Those energy values were then plotted on a graph in order to see if the system was conserving energy. Formulas and Preparations for Data Analysis In order to make the calculations for potential energy, the spring constant k needed to be determined. The force exerted on the glider by the springs is given by this equation: F kx where F is the force, k is the spring constant, and x is the displacement from equilibrium. The force exerted on the glider by the hanging weight is given by this equation: F Mg where F is the force, M is the mass of the hanging weight, and g is the acceleration due to gravity. Since the two forces are in balance when the glider is at rest: kx Mg Mg force k x displaceme nt Thus, the spring constant k is given by the force of the weight pulling on the glider divided by the distance the glider is displaced from equilibrium. This values corresponds to the slope of the line fitted to the graph of force versus displacement for the various masses of the hanging weight. The value does not depend on the y-intercept of the equation for the line since it only depends on the slope of the graph. The value of k found in this manner was 5.72 ± 0.03 N/m. This value was obtained by fitting a line to the plots and performing a regression analysis. Next, the location of the center points of the timing intervals needed to be determined. Those locations were needed to calculate the average velocities at each interval. Each interval began at the leading edge of one tooth and ended at the leading edge of the next tooth. Since each tooth and space was .002 m wide, each interval was .004 m wide; and the center of each interval was at the trailing edge of the tooth that began the interval. The location of the first interval's center is found according to this formula: X (0.004 E 0.002) 0.004 E 0.002 where X is the displacement from equilibrium and E is the number of the next tooth to pass the photogate at equilibrium, with the first tooth being numbered zero. The initial displacement of the glider before it is released is considered to be negative, and the displacement of the glider after it passes equilibrium is considered to be positive. The center of every interval thereafter is found by adding the length of an interval, 0.004 m: X n 1 X n 0.004 where Xn+1 is the next interval and Xn is the current interval. The average velocity for each interval was found by dividing the 0.004 m length of each interval by the measured time elapsed to travel across the interval: v 0.004 t where v is the average velocity and t is the time to travel across the interval. The potential energy at a point during the glider's motion is found by: PE 12 kx2 where PE is potential energy, k is the spring constant, and x is the displacement from equilibrium. The kinetic energy at a point during the glider's motion is given by: KE 12 mv2 where KE is kinetic energy, m is the mass of the glider, and v is the velocity. The mass of the glider was measured to be 225.3 ± 0.05 g. The uncertainty is based on the fact that the balance used was marked to tenths of a gram. The total energy of the system at a given point of the motion of the glider is found by adding the potential and kinetic energies at that point: Etotal PE KE The total energy should remain constant throughout the movement of the glider if the system conserves energy. Procedure To prepare for the experiment, the air track was leveled by adjusting the feet of the track and checking that the glider did not move when the air was turned on. After the track was made level, the spring constant of the springs needed to be determined. This was found by placing the glider on the air track with the springs attached and attaching a weight to glider through a string and pulley and hanging the weight over the edge of the table. When the glider was allowed to come to rest, the force exerted on the glider by the springs is balanced by the force exerted on the glider by the hanging weight. The equilibrium position of the glider was found by noting the position of the glider on the air track with no weights attached. Then weights of various masses were used and the resulting displacement was noted. The forces exerted by the weights were calculated by multiplying the mass of the weight by g, the acceleration due to gravity. A graph of force versus displacement was then made using data from the various masses. The above section showed how the slope of this graph is the spring constant. The slope of the line was found by fitting a line to the points of a scatter plot and performing a regression to determine the formula of the line. The value of k found in this manner was 5.72 ± 0.03 N/m. After the value of the spring constant was determined, the air track was setup to record data for the glider's movements. A photogate was positioned over the air track and connected to the Pasco Science Workshop(PSW). A comb was place on top of the glider so that the photogate's beam would be blocked and unblocked during the glider's movement. The photogate would measure the time taken to travel across an interval. The positioning of the intervals was described in the above section. The PSW software was setup to record data from a smart pulley since a smart pulley has the same behavior of repeated blocking and unblocking of a photogate's beam. The photogate was positioned on the leading edge of a tooth so that a slight movement forward of the glider would block the photogate and begin the measuring of an interval. This position is the equilibrium position of the cart for a data run. To begin the data run, the cart is pulled back so that tooth zero has not passed the photogate. The glider is then released and the times to travel across interval is recorded by the PSW software. Information is gathered only for the time while the glider is moving forward and until it comes to a rest as it reverses its motion. Once the glider begins moving backwards, the information gathered is not used since the photogate does not know whether the glider is moving forwards of backwards. This data gathering is done three times for equilibrium positions at three different teeth. Then the potential, kinetic, and total energies were calculated as detailed in the above section. The graphs of the results are given on attached pages. Data Analysis and Error Analysis Each of the three graphs for the different equilibrium positions showed behavior which indicated that the mass and spring system was conserving energy. The kinetic energy increased as potential energy decreased, and vice versa. Kinetic energy was highest and potential energy was lowest at the equilibrium point. Potential energy was highest and kinetic energy was lowest at the ends of the graph where the glider had stopped movement as it reversed its motion. The total energy was nearly constant, which indicated that the system was conserving energy. It should be perfectly constant for a system that conserves energy, but some of the energy in the system is lost to air resistance, the slight friction with the track, and energy lost from the springs. There were also other areas which may have introduced errors into the results. If the comb on the glider was loose, it could slip as it moved. The slipping of the comb would have altered the positioning of the intervals in relation to the photogate and this would cause the times for the intervals to be incorrect. This would cause the values of kinetic energy to be incorrect. The spring attaching the glider to the air track might sag and touch the air track. This would cause the velocity of the glider to be lower since the contact between the spring and track would cause friction. The graph would show the total energy decreasing more quickly since energy is lost to the increased friction. An error in the mass of the glider would also effect the results for total energy. The formulas for velocity and kinetic energy can be combine to give the following: 0.004 KE mv m t 1 2 2 2 1 2 Using this result, the formula for the error in KE is given by the following: KE KE KE m t m t 2 2 2 .000008 .000016m KE m t 2 t3 t 2 For the data run with the 20th tooth as the equilibrium, if the mass of the glider was in error by 50 grams (0.05 kg), the error just before the equilibrium position will be: .000008m .000016m.2253kg KE .05kg .0001s .0045 J 2 3 (.0095s) (.0095s) 2 2 Thus, a change of 50 grams in the mass of the glider causes a change of .0045 Joules in the kinetic and total energy at equilibrium. The effect on the total energy would be greater when kinetic energy is a larger portion of the total energy, and it would be greatest at equilibrium. There would be no effect at the point when the glider is at rest and reversing motion since the total energy will be all potential energy, which does not depend on the mass of the glider. An error giving a larger mass would cause an increase in the calculated total energy since the kinetic energy would be calculated to be larger. Similarly, an error giving a smaller mass would cause a decrease in the calculated total energy. Another source of error is in the timer since its resolution is 0.1 milliseconds (.0001 s). For the data run with the 20th tooth as the equilibrium, this gives the following error: .000008m .000016m.2253kg KE .00005kg .0001s .00042 J 2 3 (.0095s) (.0095s) 2 2 Thus, .00042 J is the amount that the kinetic energy can fluctuate at the position just before equilibrium. It is nearly the same as the uncertainty in the total energy near the equilibrium position since there is little potential energy near equilibrium. This uncertainty can account for the scatter of the kinetic energy points since it fluctuates around .00042 J near equilibrium. Another source of error is in the positioning of the photogate. If the position of the photogate was off by the width of a tooth (.002 m), the position of the kinetic energy plot will be shifted in relation to the potential energy plot. This will cause the total energy plot to appear to dip below then rise above its line, or rise above then dip below its line, depending on which direction the photogate was mispositioned. The change in energy with respect to the glider's displacement can be found by taking the slope of the line fitted to the total energy plots. For the data run with the 20th tooth as equilibrium, the slope of the total energy line was -0.0034 ± 0.0006 J/m. This value was obtained from the regression analysis of the data. It means that the system would lose 0.0034 ± 0.0006 Joules of energy for every meter the glider traveled. Since J/m = N, the frictional force of the track is 0.0034 ± 0.0006 N. The negative was dropped because it only means that the force acts against the motion of the glider. This can be used to approximately calculate the coefficient of friction between the glider and track. The normal force on the glider is equal to the glider's weight since the track is level: FN mg .2253 kg 9.85 m s 2 2.219 N F FN N m gm 9.85 m s 2 0.00005 kg 0.0005 N m FN 2.219 N 0.0005 N 2 The coefficient of friction multiplied by the normal force should give the frictional force of the track. Using Ft = the frictional force of the track (the slope of the graph): k FN Ft k Ft 0.0034 N 0.0015 FN 2.219 N 2 k k Ft k FN Ft FN 2 2 1 F k Ft t 2 FN FN FN 2 2 2 0.0034 N 1 k 0.0006 N 0.0005 N 0.0003 2 2.219 N (2.219 N ) k 0.0015 0.0003 Thus the coefficient of friction is approximately 0.0015 ± 0.0003. If the manufacturer had made a mistake and made the distance from tooth to tooth to be twice as wide at .008 m, it would affect the apparent conservation of energy. In the graph, the potential energy would not be changed since it is based on the assumption that each interval will change the displacement by the .004 m. However, the kinetic energy values will be lower since it will take longer to travel across the wider intervals, so the velocity and kinetic energy will appear to be lower. Thus, the total energy will be lower when kinetic energy is a larger part of the total energy. The total energy plots will appear to dip down then rise back up as kinetic energy increases then decreases, and as potential energy decreases then increases. The mass of the springs that were attached to glider were not taken into account when calculating the mass of the glider. This was because parts of the spring moved more than others, and the spring did not move the entire distance of the glider, so the spring's mass was neglected to simplify the calculations. The error introduced into the kinetic energy calculations did not seem large enough to be significant since the graphs follow the pattern expected of a system that conserves energy. Conclusion The results of this experiment show that the mass and spring system used in this experiment conserves energy. The graph of the data showed that the system behaved as expected for a system that conserves energy. The kinetic energy increased as potential energy decreased, and vice versa. The total energy was nearly constant throughout the glider's movement, but there was a small energy loss due to air resistance, the slight friction with the track, and energy lost from the springs. Despite the slight energy loss due to those factors, the system still demonstrated behavior that strongly supports that the system is conserving energy.