Design considerations for an assembler
by
Ralph C. Merkle
Xerox PARC
3333 Coyote Hill Road
Palo Alto, CA 94304
merkle@xerox.com
www.merkle.com
Copyright 1995 by Xerox Corporation. All Rights Reserved.
This paper was presented at the Fourth Foresight Conference on Molecular
Nanotechnology. The final version was published in Nanotechnology 7 (1996) pages 210215. This web version differ in some respects from the published version.
This paper is available on the web at
http://www.zyvex.com/nanotech/nano4/merklePaper.html
WARNING: This page uses the <sup> and <sub> convention for superscripts and
subscripts. If "103" is the same as "103" then your browser does not support superscripts.
If "xi" is the same as "xi" then your browser does not support subscripts. Failure to
support superscripts or subscripts can lead to confusion in the following text, particularly
in interpreting exponents.
Abstract
Assemblers have been proposed as general purpose manufacturing devices, able to build
a wide range of useful products as well as copies of themselves. If such systems are to be
built they must first be designed; and before they can be designed in detail we need to
know at the system level what major subsystems are needed, what functions they
perform, and how they interact with each other. This paper attempts to fill this need and
describes the subsystems and components required for a relatively "simple" assembler.
Introduction
It is now widely believed that nanotechnology (see http://www.zyvex.com/nano) is
feasible and will likely be developed in the coming decades. However, there is still
significant uncertainty about what molecular manufacturing systems might look like and
even greater uncertainty about how best to proceed in developing such systems. This
uncertainty is not aided by the fact that many different development pathways are likely
to work, and that to a significant extent the selection of a specific pathway is arbitrary.
Further, as our present vantage point suggests that all pathways will require at least a few
major stages, the analysis of the advantages and disadvantages of alternative paths is
rendered complex. We try to reduce this complexity by outlining a "simple" molecular
manufacturing system.
The direct manufacture of this "simple" system with current technology seems unlikely to
be feasible. As a consequence, it will probably be necessary to develop other systems that
are easier to synthesize using today's methods, but which are sufficiently powerful that
we can use them to synthesize more sophisticated systems. This might be likened to the
ascent of a tall mountain in stages, with base camps established at intermediate
elevations. The precise nature of these intermediate stages depends on the design of the
final stage. The present proposal might be likened to a final base camp, close enough to
the peak that it's clear that a final assault from this final base camp would reach the peak,
but far enough removed that it's significantly easier to reach the base camp than the peak.
A present guess about what a mature molecular manufacturing system might look like is
some form of convergent assembly system (Merkle, 1997a). It should be possible to
manufacture such a system given the capabilities of the simple diamondoid assembler
described here. We do not propose the construction of a convergent assembly system
directly because it would be significantly more complex and would need significantly
more resources to complete.
What is nanotechnology?
The term nanotechnology is often used to refer to almost any technology where some
characteristic dimension is smaller than a micron. By contrast, the usage in this paper
refers specifically to molecular nanotechnology, a.k.a. molecular manufacturing. The
basic thesis of this field is that most structures consistent with physical and chemical law
can be manufactured inexpensively. This possibility was first mentioned by Feynman in a
visionary talk in 1959 (Feynman,1960). More recently, it has been the subject of
considerably more detailed analysis in Nanosystems (Drexler, 1992).
Current proposals for molecular manufacturing systems revolve around two central
concepts: positional control (Merkle, 1993) and self replication (Merkle, 1992). At the
macroscopic scale, the idea of using positional control as part of the manufacturing
process is not only quite natural it is hard to imagine a modern factory without it. Parts
are moved from place to place by conveyor belts, robotic arms, human arms, and a
variety of other contrivances. After being positioned appropriately with respect to each
other they are then bonded, glued, soldered, screwed, clamped, hooked or otherwise
connected to each other. The resulting assemblage of parts is then moved along and
usually connected to other parts.
At the molecular scale, the most common method of assembling parts is some form of
self assembly. Molecular parts (in test tubes) are stirred together and allowed to gyrate,
bump, jostle and bang into each other under the influence of thermal noise. By exercising
great ingenuity, chemists are routinely able to synthesize a remarkably wide range of
small molecular structures without the molecular equivalent of hands: the parts
spontaneously arrange themselves in the desired pattern. It seems intuitively plausible
that adding positional control at the molecular level should enable the synthesis of a
much broader range of structures than is now feasible.
Positional control at the molecular scale is, however, a new concept that has yet to be
fully accepted. While experimental successes (Eigler and Schweizer, 1990) clearly
demonstrate that positioning molecular parts does not violate any fundamental laws of
nature, such successes are today limited to specific systems. Perhaps the clearest support
for the idea that more general capabilities are feasible comes from ab initio and molecular
mechanics modeling of specific reactions that should prove useful in the synthesis of
desired structures. See, for example, Theoretical studies of a hydrogen abstraction tool
for nanotechnology (Musgrave et al., 1991) or Surface patterning by atomicallycontrolled chemical forces: molecular dynamics simulations (Sinnott et al., 1994), as well
as the discussion of mechanosynthesis in Nanosystems (Drexler, 1992).
We shall assume, for the remainder of this article, that molecular positional control is an
essential prerequisite for molecular manufacturing.
Self replication
The second central concept on which current proposals for molecular manufacturing are
based is that of self replication. The utility of this is fairly obvious: it lets us make things
inexpensively. While the addition of positional control to our manufacturing methods
should let us build a much wider range of structures than could otherwise be considered,
the manufacture of a few molecular sized components will not, by itself, greatly alter the
economics of the world's manufacturing base. If we are to build macroscopic structures
which are molecular in precision using positional control to position and assemble
molecular size components, we will need mole quantities of positional devices. This has
two implications: the devices themselves will have to be small, and their manufacture
will have to be completely automated (human intervention in the manufacture of each of
a mole of devices seems implausibly labor intensive given the present population).
A conceptually simple way of meeting these requirements is to embody the needed
capabilities in a self replicating device called an assembler, which has one or more
positional devices controlled by a small general purpose computer. As the assembler can
make copies of itself (the author does work at Xerox) a single assembler can manufacture
a second, those two can make two more, those four can make four more, etc. Exponential
growth allows the rapid manufacture of as many assemblers as might be desired, while
the fact that they are under computer control permits them to be reprogrammed to build
other structures that are deemed useful (molecular computers, for example).
Although we have elevated the concept of self replication to the status of a central
principle, it would be incorrect to assume that self replication, in and of itself, is valuable.
A device able to make copies of itself but which was unable to make anything else (and
was otherwise of no particular value) would be of no great value. The value of the
assembler rests fundamentally on its ability to make a great many different things under
programmatic control. Self replication is used as a method of achieving economy in the
manufacturing process, not as an end in itself.
Design objectives
As there are a great many possible assemblers, and as their characterisics vary
considerably, it is necessary to provide some context for the particular design approach
selected here.
First, we seek a design which fairly obviously will let us build a reasonably broad range
of useful products, including more sophisticated assemblers. We do not demand that the
proposed design be able to directly manufacture the full range of products which might
be desirable, but will instead restrict ourselves to the class of "diamondoid" structures,
defined in Nanosystems (Drexler, 1992) as including structures made from hydrogen;
first row elements such as boron, carbon, nitrogen, oxygen and fluorine; and perhaps
some second row elements such as silicon, phosphorous, sulfur and chlorine. Metals and
other elements will generally (though not always) be excluded from consideration. We
will frequently confine ourselves to hydrogen and carbon, as hydrocarbon structures are
relatively easy to analyze and can often provide remarkable materials properties (e.g.,
diamond, graphite, and related structures). Potential energy functions which provide a
good description of the behavior of hydrocarbons are available. Brenner's potential
(Brenner, 1990) is an example. It is able to model not only relatively stable structures, but
also transition states and less stable structures. The utility of this potential for modeling a
wide variety of hydrocarbon-based molecular machines and synthetic reactions has been
noted by Brenner (Brenner et al., 1996). One example available on the web is the work of
Robertson (Robertson et al., 1994), who did molecular dynamics simulations of
molecular gears (available at
http://chem.iupui.edu/Chem/Research/Robertson/Roberston.html).
The restriction to diamodoid structures has two major advantages. First, these structures
have some of the most desirable materials properties known. They involve strong
covalent bonds, and hence include the strongest and stiffest materials. Their other
materials properties -- chemical, thermal, electrical, optical etc. -- are also remarkable.
Second, their behavior (particularly when we confine ourselves to relatively simple
structures) is easier to understand and analyze.
We will further restrict ourselves to the class of "small" diamondoid structures, e.g.,
structures which are about the same size as the proposed assembler.
We choose the broadcast architecture. In this architecture, the assembler does not have
an on-board computer, but is instead directed by simple broadcast instructions. This
architecture is similar to the "SIMD" architecture used in some massively parallel
computers. A central computational element (macroscopic) broadcasts simple
instructions to a large number of assemblers. The assemblers are barely able to decode
and execute these simple instructions, thus reducing their complexity and size.
Several things must be described if we are to specify an assembler, as discussed in
(Merkle, 1992). For this proposal, we will use:
The double tripod (Merkle, 1997c). This is a relatively compact, six degrees of
freedom positional device which combines high stiffness with a wide range of
motion.
To allow the synthesis of diamondoid structures, we will use molecular tools with
highly reactive tips (Merkle, 1993). These reactive tips will include radicals,
carbenes, and other highly reactive species of the general type found today in the
CVD synthesis of diamond. Some proposals for reactive tips are:
The use of highly reactive compounds as molecular tools implies that the internal
environment of the assembler must be inert. We select compressed neon. While
vacuum is also inert, as will be made clear later we require an internal medium
that is able to carry acoustic (pressure) signals. Helium is an attractive alternative
and should also work. As the design might use sliding seals which should block
diffusion of the inert gas (useful for the design of pressure actuated ratchets and
pistons -- though bellows, which have no sliding seals at all, are also feasible) it is
convenient to select the slightly larger inert gas. While sliding seals that block the
passage of helium should be feasible, they must be tighter and present a greater
design challenge.
The internal transport of molecular tools and other components will be done by
the double tripod positional device, mentioned above. This "pick and place"
approach is not the most efficient, but simplifies the design. Note that within the
shell of the assembler, the location of every structural atom is known to within the
uncertainty created by thermal noise (positional uncertainty caused by quantum
effects is smaller than uncertainty caused by thermal noise for the conditions
considered here (Drexler, 1992, figure 5.2)). As the internal structural components
have relatively high stiffness, the positional uncertainty caused by thermal noise is
small. The basic equation relating temperature to thermally induced uncertainty in
position in one dimension is:
positional variance = kT/ks
where k is Boltzmann's constant, T is the temperature in Kelvins, and ks is the
stiffness in newtons/meter (Drexler, 1992, equation 5.4).
At room temperature, kT is approximately 4 x 10-21 joules. A reasonable value for
ks is 10 newtons/meter. The resulting variance in position is 4 x 10-22 meters2,
leading to a standard deviation in position of 2 x 10-11 meters or 0.02 nanometers.
In short, provided that reasonably stiff structural elements are used, the position of
every structural atom in the system can be known to within a fraction of an atomic
diameter with high reliability at room temperature and without the need for
explicit positional sensing. This approach might be likened to a blind man
assembling a product at a workbench where every tool and every component had
a known position -- the blindman would be able to perform the assembly
operations despite the absence of positional sensing capabilities because the
location of every nut and bolt was known.
While this approach requires that the positional device have very good absolute
positional accuracy, the positional device is itself molecular in precision.
Therefore there will be no structural errors in the positional device to cause wear
or other unpredictable sources of positional uncertainty. Thermal noise will be the
only significant contributor to positional uncertainty, and by designing a system
that is sufficiently stiff this can be reduced to acceptable levels.
To isolate the internal environment from the external environment, we will use a
diamondoid wall. Much of this wall could be graphitic, as this is both thin and
should be sufficient to prevent the entry of unwanted contaminants from the
external environment.
The external environment will be liquid. Several candidates are possible including
water, a suitable hydrocarbon (e.g., hexane), or a wide range of others. A major
factor in determination of the liquid external environment is the need to dissolve
the feedstock molecules in it. As the design of these molecules has not yet been
specified, the selection of the external liquid environment is also not specified.
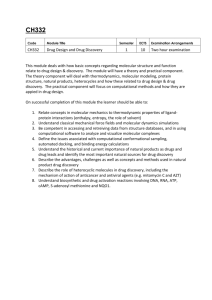
While feedstock molecules could be transported from the exterior of the
assembler to the interior using multiple stages of variable affinity binding sites
(one of which is depicted in the following figure from Nanosystems (Drexler,
1992)) simpler but less general alternatives are explored in (Merkle, 1997b).
Broadcast signals will be transmitted from the central (macroscopic) computer
control system to the assemblers by acoustic waves. These will be carried outside
the assemblers by the liquid in which they are immersed, and inside each
assembler by the compressed neon used as the internal environment.
Each degree of freedom of the double tripod will be controlled by a suitable
threshold pressure actuated rachet. These ratchets will be operated by using
pressure actuated pistons.
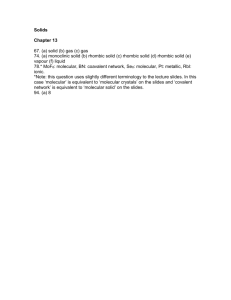
A design using a constant force spring is relatively compact. Once the external
pressure exceeds the threshold, the piston will move to the left by its full throw.
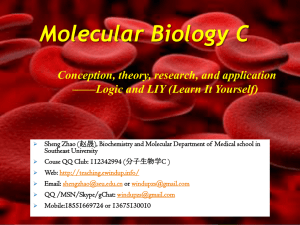
An alternative design is:
The pressure threshold in this design is adjusted simply by altering the pressure of
the confined gas. By contrast, the threshold in the constant force spring is adjusted
by small shifts in the diameter of the internal shaft and external sleeve -- which
makes the threshold more sensitive to the precise details of the potential energy
function, and in particular the repulsive van der Waals interaction between the
shaft and sleeve. The use of compressed gas in the second design makes it less
sensitive to the details of the potential energy function.
Unfortunately, these advantages are purchased at a cost: the use of compressed
gas results in a larger piston and reduces its sensitivity to changes in external
pressure. In particular, when the external pressure is increased the volume of the
confined gas is decreased by the piston, and hence its pressure increases. This
implies that a larger change in external pressure is required to move the piston the
same distance. While this can be compensated by increasing the total volume of
the confined gas, (and hence decreasing the relative change in volume caused by
movement of the piston a specific distance), it will cause a further increase in the
size of the piston.
If the piston in the first design has a working volume of 125 cubic nanometers,
then a pressure change of 3.2 x 106 Pascals (about 32 atmospheres) would permit
the piston to generate 4 x 10-19 joules (2.5 electron volts, 58 kilocalories/mole).
This means that forcing the piston to the "wrong" end of its throw will require an
amount of energy much greater than thermal noise. In consequence, reliable
operation, even in the face of thermal noise at room temperature, is feasible when
the piston size is on the order of 100 cubic nanometers.
Qualitatively similar but numerically somewhat different results hold for the
second design.
Different ratchets could have different activation pressures, and so by adjusting
the static pressure to the threshold value of a specific ratchet, and then varying the
pressure to just above and just below the threshold, the specific ratchet can be
activated. Nanosystems (Drexler, 1992) discusses pressure actuated ratchet
mechanisms and the fundamental issues surrounding reliable ratchet operation in
the face of thermal noise.
We adopt a variant of the pressure actuated ratchets proposed in Nanosystems that
provides somewhat greater flexibility in addressing individual ratchets. In
particular, we will adopt a "two band" signaling model. That is, instead of
adressing each individual ratchet by assigning it its own pressure range, we use
pairs of ratchets and use only two pressure ranges. The first pressure range
activates the first of the pair of ratchets, which we will call stepping ratchets, and
causes a circular band to be stepped forwards. At one or more points on the
circular band are notches that indicate that the second of the pair of ratchets is to
be made active. Each pair of ratchets has a unique set of notches in its associated
circular stepping band. The second ratchets we will call working ratchets: they
control the actual activities of the assembler. All working ratchets are either active
or inactive, depending on the presence or absence of a notch in the stepping band.
Signals sent in the second pressure range cause the active working ratchets to step
but have no effect on the inactive working ratchets. By this method an indefinite
number of working ratchets can be made active or inactive, and in fact can be
made active and inactive in sets (if that should prove useful). We might, for
example, arrange matters so that all working ratchets that extend their respective
struts could be made active at the same time, permitting the more rapid extension
of the double tripod.
The price we pay for this mechanism is the need to send stepper signals to
activate the stepper ratchets and so select which working ratchets are to be active.
While this will somewhat slow the signaling process, it has the distinct advantage
over the original proposal in Nanosystems that the addition of new working
ratchets will not require an extension in the pressure range of the system. Thus,
new working ratchets can be readily added late in the design or implementation
cycle with minimal bother. In addition, the total pressure range that the system
must accomodate is made much smaller, simplifying both the pressure control
mechanisms and the design of the pressure actuated ratchets (the amount of
overpressure that a ratchet is required to tolerate is greatly reduced, for example).
As the pressure actuated ratchets are inside the assembler and the source of the
pressure changes is outside, we must insure that pressure changes are transmitted
with reasonable accuracy from the outside to the inside. A piston at the end of the
assembler (see the final illustration in this article showing the "simple"
diamondoid assembler) is one method for insuring equilibration of pressure inside
and outside the assembler. As the external pressure is varied the piston slides back
and forth, transmitting pressure changes from the outside of the assembler to the
inside.
Bellows would also work, and would have the advantage that they could be more
compact in the collapsed state. Because a new assembler is manufactured inside
an existing assembler, reducing the volume occupied by the pressure equilibration
subsystem in its compact state (i.e., the state in which it is manufactured) is
advantageous. If the objective is to achieve the smallest manufactured size while
simultaneously having the largest expanded size, manufacturing a collapsed
sphere would seem to be the limiting case. A somewhat simpler system to
manufacture in the collapsed state might be a tube. A tube is very compact when
rolled up, much like a toothpaste tube after the toothpaste has been squeezed out
or a rolled up sleeping bag. Inflating the tube (somewhat like a party blowout)
would create a large increase in volume.
A second reason for keeping the external and internal pressures approximately the
same is to reduce the changes in geometry caused by such pressure shifts. While
mostly harmless, even relatively small shifts in geometry could influence the
position of the tool holder with respect to the workpiece under construction. As
this relative position must be maintained to within a fraction of an atomic
diameter, the introduction of additional stresses on the positional mechanism and
the mechanical path between it and the object under construction should normally
be avoided.
We could have adopted a different approach. If, for example, we had decided on a
vacuum for the internal environment, and had also decided to use external
pressure changes to transmit information, we could have isolated the positional
mechanism from the adverse affects of external pressure changes by introducing
an external pressure shell decoupled from the internal mechanisms. The reader
might note that we already have such an external shell, so it should be feasible to
adopt this approach for the present design. The issue of geometry changes caused
by external pressure changes when the new external pressure shell is itself being
constructed would need to be addressed before this approach could be adopted, as
well as the mechanisms for controlling the positional device and other internal
devices when the pressure changes are not transmitted to the interior. While
hardly insurmountable, these issues made the present approach appear somewhat
simpler.
Other devices required for assembler operation besides the struts of the double
tripod will also be operated by threshold pressure actuated ratchets. As will be
appreciated, the use of the broadcast architecture and compressed neon as the
broadcast medium for acoustic signals provides a great deal of flexibility in the
positioning of mechanically operated control devices.
To maintain the internal neon environment while at the same time preventing
entry of contaminants requires a selective transport mechanism for neon. Note
that in this respect, the use of neon requires a slightly more complex design than
helium. A selective transport mechanism for helium would involve little more
than small pores, large enough in diameter to permit the passage of helium but
sufficiently small to exclude other contaminants. For neon, a somewhat larger
pore size will be required. This larger pore size might permit the entry of linear
molecules composed of first row elements: e.g., N2, O2, CO2, etc. A simple pore is
therefore insufficient. A mechanism for dealing with this problem would be to (a)
block both ends of the pore, (b) adopt a short pore length, insufficient to hold any
molecule longer than neon in the pore when the ends are blocked and (c)
alternately open either end of the pore. It is important that both ends of the pore
never be open at the same time, as this would permit entry of linear molecules.
Various mechanisms for achieving this are possible. Drexler has proposed a
molecular pump which should be able to pump neon.
Hydrogen gas will likely be able to penetrate such a mechanism, and so hydrogen
gas must be excluded from the external liquid -- suitable gettering should suffice.
Helium will also be able to penetrate such pores. While the concentration of
helium should be kept small, some trace amounts of helium should be harmless.
Proposed designs for pores must be compared with the expected profile of
contaminants in the surrounding liquid to insure that the rate of entry of
contaminants is sufficiently small.
A few other small contaminants (such as N2) might also be of concern. While it
seems unlikely that they would enter as readily as Ne, H2 or He, their entry rate
might still be unacceptably high. If this proves to be the case, then their
concentration in the external liquid environment must also be kept low. For the
present proposal this is acceptable as a major objective is to simplify the design of
the assembler even if that increases the cost of creating and maintaining the
environment in which it operates. More generally, the complexity of the self
replicating component can often be reduced by imposing tighter constraints on the
environment in which it functions.
Many pore designs are possible. One approach would be to use buckytubes of
suitably selected diameter. Particularly when we include helical bucky tubes, the
range of possible diameters is very large and so the selection of an appropriate
pore size should be relatively easy.
Finally, self replicating systems that employ a barrier to prevent external
contaminants from entering the internal regions also require a method of
increasing the volume of the internal region. We adopt a proposal by the author
(described in Nanosystems along with several other approaches) which has
sometimes been called the replicating brick. In this approach, a brick with
dimensions X > Y > Z extrudes a new brick along the Z axis oriented such that
the Y dimension of the newly extruded brick is aligned with the X dimension of
the original brick, and the Z dimension of the newly extruded brick is aligned
with the Y dimension of the original brick. The X dimension of the newly
extruded brick is aligned with the Z dimension of the original brick, but because
this is the direction of extrusion the fact that X > Z does not create a problem.
Rather than directly extruding a new brick of dimensions X, Y and Z; we will
instead extrude a somewhat larger "hollow shell" of dimensions 2*X+deltaX,
Y+deltaY, and Z+deltaZ. The hollow shell permits the construction inside it of
two assemblers of dimensions X, Y and Z. When the two new assemblers have
been manufactured inside the hollow shell, the shell is pushed out of the original
assembler. This breaks the seal of the original assembler (the parent "dies" in the
process of releasing the two offspring) and opens up one end of the hollow shell,
thus permitting the two newly manufactured assemblers to exit the shell.
While this process is clearly wasteful (retaining the parent assembler in a
functional state would be desirable), it simplifies the design of the extrusion
process as the hollow shell is called upon to perform only a single task, rather
than also acting as the wall of the new assemblers. Changes in the design of the
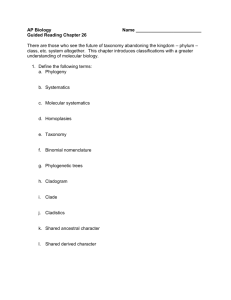
hollow shell and its extrusion process have little impact on the design of the
assembler.
The following diagram illustrates the main features:
Conclusions
We have briefly outlined an architecture for a self-replicating assembler able to
synthesize the class of small diamondoid structures. While there is no obvious synthetic
route to manufacturing this system with today's technology, it is significantly simpler
than previous proposals. Further work aimed at defining more accessible proposals
appears worthwhile. A series of proposals ranging from simple low performance systems
that might be directly synthesized with today's technology to high performance systems
able to make a wide range of diamondoid structures is needed, along with a clear
description of how each proposed system would manufacture systems in the next stage of
complexity and performance.
References
Brenner, D.W. (1990) Phys Rev B, 42 No. 15, November 15, pages 9458-9471.
Empirical potential for hydrocarbons for use in simulating the chemical vapor
deposition of diamond films
Brenner, D.W.; Sinnott, S.B.; Harrison, J.A.; and Shenderova, O.A. (1996)
Nanotechnology 7, pages 161-167. Simulated engineering of nanostructures
Drexler, K.E. (1992) Nanosystems: Molecular Machinery, Manufacturing, and
Computation, Wiley.
Eigler, D.M. and Schweizer, E.K. (1990) Nature 344, pages 524-526. Positioning
single atoms with a scanning tunnelling microscope
Feynman, R.P. (1960) Caltech's Engineering and Science, February. There's
Plenty of Room at the Bottom
Merkle, R.C. (1992) Journal of the British Interplanetary Society, 45, pages 407413. Self Replicating systems and molecular manufacturing
Merkle, R.C. (1993) Chemical Design Automation News, 8, Nos. 9 & 10,
September/October. Molecular Manufacturing: adding positional control to
chemical synthesis
Merkle, R.C. (1997a) Nanotechnology 8, pages 18-22. Convergent Assembly
Merkle, R.C. (1997b) Nanotechnology 8, pages 23-28. Binding sites for use in a
simple assembler
Merkle, R.C. (1997c) Nanotechnology 8, pages 47-52. A new family of six degree
of freedom positional devices
Musgrave, C.B.; Perry, J.K.; Merkle, R.C.; and Goddard, W.A. (1991)
Nanotechnology 2, pages 187-195. Theoretical studies of a hydrogen abstraction
tool for nanotechnology
Robertson, D.H.; Dunlap, B.I.; Brenner, D.W.; Mintmire J.W. and White, C.T.
(1994) Materials Research Society Symposium Proceedings, 349, pages 283-288.
Fullerene/tubule based hollow carbon nano-gears. See also
http://chem.iupui.edu/Research/Robertson/Robertson.html.
Sinnott, S.B.; Colton, R.J.; White, C.T.; and Brenner, D.W. (1994) Surface
Science 316 pages L1055-L1060. Surface patterning by atomically-controlled
chemical forces: molecular dynamics simulations
This page is part of the nanotechnology web site.