Final Project Report Template (MS Word)
")
Texas A&M University-Kingsville
Fabrication of Composite Structures
MEEN 4385
DEVELOPMENT OF A SIMPLE MORPHING WING USING ELASTOMERIC COMPOSITES
AS SKINS AND ACTUATORS
James Mejia (undergraduate student)
Ben Narvaez (undergraduate student)
Kyle Thompson (undergraduate student)
Madhuri Lingala (graduate student)
Texas A&M University-Kingsville
Mechanical and Industrial Engineering
MSC 191, 700 University Blvd
Kingsville, Texas-78363-8202, USA
Phone (361) 593-2003, Fax (361) 593-4026
ABSTRACT
Morphing wings are desired for their ability to reduce drag, change flight characteristics, and perhaps reduce weight by with a heat-activated CRG shape memory polymer composite skin. Thermal problems prompted a change to a fiberreinforced silicone elastomeric skin [2]. FlexSys has developed eliminating flap / aileron mechanisms. Development of two generations of a student morphing wing project is documented.
The second wing was further developed by Peel. The work shows how a relatively low cost but realistic morphing wing test-bed can be fabricated. Wing skin, actuator, and actuator attachment development are discussed, as well as possible auxetic skin behavior. Aerodynamic characterization of the wing will be discussed in another paper.
A very simple morphing wing was fabricated in phase one.
The nose was able to elastically camber down ~ 25º and the tail
20º. Actuation was provided by three pneumatic “Rubber
Muscle Actuators” (RMA) that produce high contractive forces.
Upper and lower wing skins were fabricated from carbon fiber / polyurethane elastomer laminates. Lower skin buckling, actuator air leaks and actuator attachment problems were resolved in the second phase. A finite element model of the generation II wing was developed and is being used to refine/ explore the morphing wing test-bed. The second generation wing fabrication methodology shows smooth elastic cambering and no buckling or waviness in the skins. The nose cambered down 23º and the tail cambered down to 15º. Improved leakfree biomimetic actuators and attach points now include no metal parts, have higher actuation forces due to new braided sheaths and functionally gradient matrix properties.
BACKGROUND AND OTHER WORK
There are many morphing wings in development. Perhaps the most well-known is Lockheed Martin’s Z Wing concept [1].
This aircraft has rigid internal components, hinged at appropriate locations, with the hinged areas initially covered a Mission Adaptive Compliant Wing (MACW), fabricated with aluminum skins where the leading edge can deflect downward by 6º and the trailing edge can deflect ±10º [3]. Skillen and
Crossley [4] consider the folding wing and a variable sweepwing approach, in a modeling and optimization study. Their research will be used in future sweep-wing phases of the current work. Kikuta [5] explicitly outlines a number of requirements for a morphing skin of an aircraft wing: a) Elastic/flexible in the chord-wise direction to allow low force actuation in cambering, b) Stiff in the spanwise direction to withstand aerodynamic and inertial loads, c) Toughness, d) Abrasion and chemical resistant, e) Resistance to varying weather conditions, f) High strain capability, g) High strain recovery rate, h) Environmental longevity and fatigue resistance. i)
These requirements are addressed throughout the paper but at first glance the current fiber-reinforced elastomer system fulfills a-g, but more study is needed to reach fulfillment of h. Thill et. al. [2] review many types of morphing skins, structures, and actuation methods. On elastomer skins, they note that the high strain capability is useful but that it would be “difficult to design elastomeric skins that can sustain and transfer aerodynamic loads to the underlying structure.” By incorporating reinforcement into a suitable elastomer, load transfer is more easily accomplished. They review a number of foam and cell-like auxetic materials and Alderson’s auxetic
1 Copyright © 2008 by ASME
composites [6]. Thill et. al. [2] note some of the useful properties of auxetic materials to be high energy absorption, fracture toughness, and resistance to indentation. “Large inplane Poisson’s ratio skins would give anticlastic shapes and negative inplane Poisson’s ratio skins would induce synclastic behavior when bent out of plane.”
Peel [7-9] has experimentally obtained inplane Poisson’s ratios as high as 21 and as low as -5, using fiber reinforced elastomer laminates, and has predicted inplane Poisson’s Ratios between -60 to 100. In 2004 Rathnam and Peel [10] compared impact resistance and fracture toughness of several fiberreinforced polyurethane composites with epoxy composites and baseline metals. The intermediate (RP 6442 polyurethane) and rigid (RP 6444 polyurethane) elastomer composites had greater specific impact strength than equivalent epoxy composites and baseline aluminum and steel. Their carbon fiber/ semi-rigid polyurethane tubes had higher residual compressive strength than their carbon fiber/ epoxy counterparts. In 2005
Keshavamurthy, Hossakere, and Peel [11] show that nonoptimized FRE laminates which exhibit negative Poisson’s
Ratios can produce damping about 100% greater than an equivalent axial stiffness FRE laminate with positive Poisson’s ratio.
Klute, Hannaford, and others have worked with pneumatic muscle actuators (McKibben-like) for many years, and have explored their actuation, fatigue, and control characteristics [12-
14]. In 1997 Peel fabricated McKibben-like actuators using a filament winder. As the winder laid down the fiber, it was impregnated with a compliant elastomer [9]. Hossain conducted linear finite element analyses of Peel’s and other pneumatic muscle actuators, and reviewed many types of actuator attachments [15]. Using a fabrication method similar to Peel [9], Shan, Bakis and others at Penn State have fabricated and characterized pneumatic muscle actuators for use in morphing structures [16, 17].
RESEARCH OBJECTIVES
Many research papers discuss the modeling of morphing aircraft structures, but less has been said on the fabrication of such structures. The current work shows a relatively inexpensive approach to the fabrication of simple but realistic morphing structures using conventional composites fabrication techniques. The work draws heavily on Peel’s work with elastomeric composites. Aerodynamic characterization of the
Generation II wing will be covered in a separate paper.
FIRST GENERATION WING
Peel and two undergraduate students, Krystal Gunter, and
Royce Coons, fabricated and tested the first prototype morphing wing during a two week “Maymester” undergraduate research experience program in May 2006. The wing was to be built with supplies from the TAMUK composites fabrication lab, using Peel’s expertise. The two students drew a reasonable airfoil cross-section and created a paper model of the wing as shown in Figure 1. The working paper model allowed the students to simulate camber change and consider possible problems.
Figure 1. Paper model of initial morphed wing.
It was decided that the wing would have a rigid wing box fabricated from carbon/epoxy, and that the upper and lower skins would be a flexible composite using IM7 carbon tow and a rigid polyurethane elastomer. Actuation would be provided by three “Rubber Muscle Actuators (RMA).”
A simple finite element model of the wing was created, and applied enforced displacements to the nose and tail. The resultant positive camber change indicated that their wing configuration, with internal contracting actuators would indeed camber down.
Fabrication –Wing Skins and Wing Box
All parts of the wing, as shown in Figure 2, except the lower wing skin (which was fabricated earlier) were fabricated from scratch. The upper composite skin is a [±10º] carbon fiber laminate, impregnated with Huntsman’s RP6444 semi-rigid polyurethane elastomer. The elastomer has an initial Young’s modulus of 1.8 Gpa (26,300 psi), and can elastically stretch up to 300% (A rubber band has an initial Young’s Modulus of about 1.65 Mpa (230 psi) and can stretch about 700%).
RP6444 is commonly used as a resilient coating on ore-hauling truck beds and is very impact resistant when combined with carbon or fiberglass fibers [10]. The bottom skin is a [90º] carbon fiber laminate, impregnated with a less stiff RP6442 elastomer. The low fiber angle on top makes the upper skin stiffer in bending (about the spar), and helps the wing to have a smooth curvature as the skin bends downward. The nose section was formed over a male mold. All other skin sections were laminated and formed on a flat surface.
Figure 2. Initial morphed wing.
The wing box was formed by wrapping epoxy-impregnated carbon cloth around a shaped Styrofoam core and vacuumbagging it. After cure, the foam core was dissolved with acetone
2 Copyright © 2008 by ASME
and the wing box was trimmed. As this wing was to only demonstrate the morphing concept, no effort was made to use aerospace grade composites-specific fasteners. All skins were attached to the wing box with small wood screws and washers.
Fabrication –Actuators
The wing’s movement is enabled by three McKibben-like rubber muscles actuators. As explored by Hossain and Peel [9,
15] the rubber muscles expand radially, but contract axially when filled with compressed air. The magnitude of force and contraction are functions of fiber angle, actuator diameter, and pressure. method did not place any tension loads on stoppers or air fittings that are under internal pressure, but caused the fibers to take all tension loads.
Figure 3. High force filament wound (FW) Rubber
Muscles Actuators used in the first morphing wing.
These rubber muscles actuators (RMA), as shown in Figure
3, are 0.5 inches ID, and are fabricated using AS4 carbon tow and Huntsman’s RP6410 very flexible elastomer. Traditional
McKibben-like actuators use pre-braided sheaths with minimum fiber angles near 20º. Using a filament winder the generation I actuators were wound at 10º, producing higher contractive forces for the same actuation pressure. Each produced approximately 200 lbs (90.7 kg) initial contractive force at 30 psi (207 kPa) as indicated in Figure 4.
The rubber muscles are attached to shaped wooden leading and trailing edge blocks which were attached to the skins with screws and washers. One problem noted by Peel in previous works was the method of attaching the RMAs [9, 15]. Early
RMAs [9] consisted of a filament wound fiber-reinforced elastomer tube, with air inlet at one end and a rigid “stopper” at the other end. The metal inlet fitting and stopper were covered by the wound tube and a hose clamp was tightened over it to seal the RMA. To measure actuation force, the metal air inlet and the “stopper” were held in grips. However, if too much air pressure was applied the stopper or metal air inlet would come off the muscle, possibly causing injury and loss of actuation force. To partially alleviate this problem, the RMAs shown in
Figure 3 did not have elastomer applied to their whole length.
The loose fibers were gathered into two bundles at each end of the muscle. These bundles were passed through holes drilled in the wooden blocks and the fiber ends were then clamped. This
Figure 4. Static test results and predicted actuation forces as a function of displacement (300 lb=136kg).
To seal the actuators, short wooden dowels were inserted in one end of the RMA, and wire was tightly wrapped around the outside. Flash tape was wrapped over the wire for protection.
Similarly, plastic non-load bearing air inlets were inserted in the other end and had wire and tape wrapped tightly around the actuator tube and fitting. This method was less intrusive and just as effective as hose clamps. However, both methods tend to cause stress concentrations in the RMA skins at high pressures, and are likely spots for failure if the RMAs are overpressurized.
Generation I Wing Successes and Problems
With a cash outlay of approximately $300 for materials, a working morphing wing was developed. The nose would camber down about 20º and the tail would camber down about
25º, considerably greater than the FlexSys wing [3]. A web page [17] was set up to showcase the student success and has several videos. The three RMAs provided excellent actuation but developed pinhole leaks in the fiber-reinforced elastomer
RMAs after about 30 cycles. It was noted that the dry fiber attachments at the end of the RMAs would eventually fray. The lower skin was too compliant in the chord-wise direction and also buckled as predicted by finite element analysis. The wing had a “typical” airfoil shape, and consisted of several skin sections. These skin sections had small waves where they were attached to the wing box and cambered. This wing used simple wood screws and washers as fasteners. It was understood that if the wing was disassembled too many times, the wood screws would “strip out” the composite laminates.
DEVELOPMENT OF THE GENERATION II WING
The major objectives of the second prototype were to solve the lower skin buckling problem, make a prototype small
3 Copyright © 2008 by ASME
enough to fit in a suitcase, and improve actuator issues. The main concern was to provide a structure flexible enough to handle all morphing behavior while maintaining rigid characteristics of normal wing structures. That is, the wing skin must maintain its rigidity but be flexible enough to deflect and either stretch or contract in the specified direction. A composite drawing of Generation II [18] is shown in Figure 5. The airfoil section is the common Clark Y. The wing has a 20 inch chord and a 13 inch span and fits nicely in a large suitcase.
0.051 inches (1.3 mm). This lay-up meant that the skins would be quite stiff in bending; however, the RMA actuators provide adequate force. The stiffer skins will not tend to wrinkle and will bend in a uniform manner, giving smooth aerodynamic surfaces. As noted in the Simulation section, future skin lay-ups will be optimized.
Figure 5. Drawing of generation II morphing wing.
To eliminate lower skin buckling the front lower skin is much stiffer and slides against the rigid wing box. Simple guides that slide in wing box slots are attached to the skin. The rear skin is attached rigidly to the lower wing box and slides against the tail section as shown in Figure 6. The semi-rigid lower wing skin slides out beyond the tail, effectively increasing wing area, somewhat like a fowler flap. Other possible solutions to the buckling problem included pre-stretched skins and corrugated skins that would thicken when compressed.
Sliding skins were chosen for their simplicity and proven capabilities.
A traditional wing box design was also chosen for the second generation. A piano hinge was used to secure the upper wing skin to the wing box. The piano hinge allows for a solid axis of flexure and a secure method of attachment using a Hysol
9394 structural adhesive. The hinge is removable at the wing box using common wood screws. The second generation wing, without actuators shown in Figure 6, was actuated by “hand” with some effort.
The upper wing skin and nose section was molded in a matched female / male mold, again using IM7 fiber and RP6444 polyurethane resin. All skins had a lay-up of [±10] ns
however the upper skin has an approximate thickness of 0.064 inches
(1.63 mm) while the lower skin has an average thickness of
Figure 6. Second generation morphing wing with no lower skin buckling.
The [±10] s
lay-up was obtained by filament winding fiber, while impregnating with resin, around a large PVC pipe mandrel covered with peel-ply. After winding, the wet laminate was covered with another peel ply. Before curing, this laminate was carefully cut off the mandrel and formed into shape in the matched molds. The lower skins were vacuum-bagged and cured on flat surfaces.
The wing box was again fabricated from IM7 cloth and epoxy, but was formed in a closed mold with a Styrofoam core that was later removed. The lower box plate had a molded indentation to allow a flush attachment of the lower rear wing skin.
Actuator Development
The Generation I RMAs provided sufficient contractive force, but developed pinhole leaks and had a less-than-perfect attachment method. To fabricate these actuators, a 0.5 inch steel rod was covered with peel-ply and a layer of compliant
RP6410 polyurethane elastomer was applied while the rod was rotating in a filament winder. This layer of elastomer was allowed to cure and became the inner bladder of the RMA.
After curing, carbon tow was wound while being impregnated with more elastomer. Additional elastomer was applied over the fiber. The average outside diameters were approximately 0.70 inches (17.8 mm). As noted above, sections of the RMA fiber were left dry. A proprietary method was used to remove the
RMAs from the constant diameter mandrel.
This method of fabrication worked but took approximately
3 days to obtain a set of 3 RMAs that were wound on the same mandrel. If the inner elastomer layer had any surface irregularities in it, a weak spot was formed and eventually caused pinhole leaks to form when the RMA expanded up to
300% in diameter.
The first attempt to solve this problem involved curing thin sheets of degassed elastomer on peel-ply. The thin sheets were wrapped around a prepared mandrel and bonded in place with more uncured elastomer resin. IM7 6K carbon tow was again
4 Copyright © 2008 by ASME
wound and impregnated with RP6410 resin. Sections of the fiber were left dry. After curing and removal of the RMAs from the mandrel, a plastic air inlet fitting was secured in place with carbon fiber, and the opposite end was also sealed. The dry fiber ends were sandwiched between several layers of carbon cloth, were impregnated with a rigid polyurethane resin, and were vacuum bagged and cured. The inspiration for the resultant RMAs came from compliant biological muscles attached to stiff tendons which thus form an actuator that has functionally gradient matrix properties. In the RMA, this stiffness gradient is intended to reduce stress concentrations where the actuator starts to expand radially. These set of actuators are shown in Figure 7. It is noted that the rigid attachment strips have permanent wrinkles resulting from a poor vacuum bag. Despite this, these updated RMAs were easily attached in the Gen II morphing wing. However, the actuators soon developed pinhole leaks and would not produce significant actuation force.
RMA was attached to the nose and tail sections with a series of wood screws through the flat strips.
Actuator Test Results
To determine whether the filament wound or braided sheath actuators produced the highest contractive force and contracted the most, a series of tests were conducted. Two previously 0.5 inch (1.27 cm) ID filament wound actuators (FW1 and FW2) were repaired with 3/8 in latex tube bladders. Three new
“Phase 3” braided sheath actuators (B1, B2, and B3) were also fabricated with a nominal 0.5 in (1.27 cm) ID, and 3/8 in latex bladders.
(a)
Figure 7. First functionally gradient rubber muscle actuators, un-inflated.
Conversations with an S & P Technology executive led to the development of a new and better braided sheath that would contract down to ±10º at 0.5 inches (1.27 cm) in diameter. It was also decided to use a latex rubber tube as an inner liner for the next generation of functionally gradient rubber muscle actuators. They are shown in Figures 8 a and b.
To fabricate these actuators, a braided sheath was drawn over a mandrel and pulled down to 0.5 inches (1.27 cm) in diameter. The center portion of the actuator was impregnated with a compliant elastomer to help the braided fibers maintain their configuration. After curing, the braided sheaths were removed while keeping the dry ends from unraveling. A latex tube was sealed at one end, had the other end attached to a plastic hose fitting, and was inserted in the braided sheath.
Carbon tow was tightly wound around the braided sheath over each end of the latex tube; this keeps the latex tube on the plastic fitting, and maintains an airtight seal at the other end.
All flexible parts and plastic fittings were covered with Teflon tape. The dry tow and braided sheath were impregnated with a rigid Polyurethane RP 6444 and vacuum-bagged. When cured flat, the braided sheaths form a strip at each end of the muscle that is strong enough to carry any tensile load, yet thin and flexible enough to allow insertion into the wing-box. Future
RMAs might have fastener holes molded in, but the current
(b)
Figure 8. a) Braided functionally gradient rubber muscle actuators, un-inflated. b) Same actuators partially inflated to 30 psi (207 kPa).
Actuator B3 was pressurized to failure to determine maximum safe operating pressures and unloaded actuator geometry as a function of pressure. It failed at 55 psi (379 kPa) due to latex bladder rupture.
FW1 and FW2 were tested and found to have the contractive force versus pressure relationship as shown in
Figure 9. Note that the RMAs do not start producing much force until about 25 psi (172 kPa). This is likely due to the resistance of the inner latex tube as well as the elastomer impregnated in the filament wound layer. The actuators were
5 Copyright © 2008 by ASME
250
200
150
FW1
FW2
FW1 Prestressed
FW2 Prestressed
100
50
0
0 10 20 30 40 50
Pressure (psi)
Figure 9. Contractive force vs. pressure for filament wound RMAs with latex bladders (250 lbs = 113.4kg) . fixed in a tensile testing machine and had zero tensile load applied to them. Then, air pressure was increased and recorded along with tensile force. At 50 psi (345 kPa), the machine crosshead was lowered and the actuator allowed to contract until the force readout was approximately zero or did not change. At this point, it was raised to its original length. At the original zero displacement position, the actuators were now in a
‘pre-stressed’ state and typically produced a much higher force.
Hence, two force vs. pressure curves are shown for each actuator. Typically, the higher curve is when the actuator is in a pre-stressed state. The exception to this is for the FW2 actuator. Since FW2 is an older, repaired actuator; this characteristic may be a function of the viscoelastic and/or hysteretic nature of the compliant elastomer bladder and skin, and may disappear over time.
B1 and B2 were also tested and found to have the contractive force versus pressure relationship shown in Figure
10. Likewise, they did not start producing much force until about 20 psi (138 kPa). The un-stressed B1 andB2 curves show a similar maximum force at 50 psi (344.7 kPa) of approximately
200 lbs (90.7 kg). This is similar to all of the FW test results.
However the pre-stressed B1 and B2 maximum forces are much higher, reaching as high as 406 lbs (184 kg).
450
400
350
B1
B2
B1 Pre-Stressed
B2 pre-stressed
300
250
200
150
100
50
0
0 10 20 30 40 50
Pressure (psi)
Figure 10. Contractive force as a function of pressure for braided RMAs with latex bladders (Max:
345 kPa, 204 kg) .
Representative force versus contraction curves for B1 are shown in Figure 11 and in Figure 12 for FW2. The braided actuators produced higher forces than the filament wound actuators in contraction, and on the return stroke. Note also that the braided actuator produced a force up to a maximum contraction of about 1.1 inches (2.8 cm), where the filament wound actuator only reached a maximum contraction of 0.75 inches (1.91 cm) at its minimum force. The FW2 curve in
Figure 12 appears somewhat like an elastomeric hysteresis curve. More performance data will be verified and published later.
B1 @ 40 psi Contract
B1 @ 40 psi Return
300
250
200
150
100
50
0
-1.25
-1 -0.75
-0.5
-0.25
0
Contraction (in)
Figure 11. Axial force as a function of contraction for B1 at a constant pressure of 40 psi (276 kPa).
Shadow Robotics [19] in the UK, fabricates McKibben-like actuators and has noted similar behavior in its ‘pre-stressed’ testing. Preliminary comparisons indicate that the ~13 mm B1 and B2 produce higher “blocked” forces at 30 psi (207 kPa) or
2 Bar than the 20 mm Shadow Air Muscle.
6 Copyright © 2008 by ASME
Load v Displacement of FW2, 40 psi
FW 2 @ 40 psi Contract
FW 2 @ 40 psi Return
160
140
120
100
80
60
40
20
0
-0.8
-0.6
-0.4
-0.2
0
Contraction (in)
Figure 12. Axial force as a function of contraction for FW2 at a constant pressure of 40 psi (276 kPa).
Performance of the Generation II Morphing Wing
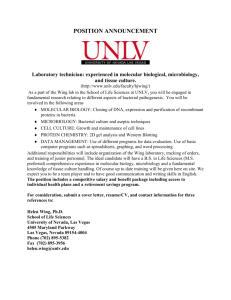
A photograph of the Gen II wing, actuated at 40 psi (276 kPa) is shown in Figure 13. The wing is placed against a grid of 2 inch squares. Little or no difference in deformation was noted between 40 and 45 psi (276 and 310 kPa) because the actuators had essentially fully contracted. At 45 psi, a tracing of the morphed outline was taken and analyzed. The nose deformed down to 23º and the tail deformed down to 15º.
Future simulation, as discussed in the simulation section, will enable increased cambering if needed.
Figure 13. Generation II wing morphed at a pressure of 40 psi (276 kPa) on a 2 inch grid.
The generation II wing shows no sign of skin buckling or wrinkling. The crude guide carbon/epoxy guides enable the lower skin to easily slide back and forth. Three phases of
Rubber Muscle Actuators were developed and refined, with further refinement possible. The wing currently uses standard wood screws as fasteners, but could easily be modified to use composites-specific fasteners. At a later date, the wing will be modified to allow the tail to actuate separately from the nose.
Access holes and cut-outs on the next wing box also need to be optimized.
Discussion of Auxetic Wing Skins
Fiber-reinforced elastomer laminates can be tailored to produce a large range of Poisson’s ratios. Figure 14 shows the
Poisson’s ratio for a series of [
] s
laminates, where
ranges from -90º to 90º and
ranges from 5º to 45º. Note that for a balanced or angle-ply laminate such as [±10] s
the inplane
Poisson’s ratio v xy
is about 8, or extremely positive. A less axially stiff laminate such as [±30] s
has an inplane Poisson’s ratio of 3. On the other hand an unbalanced laminate such as
[15/45] s
has a negative inplane Poisson’s ratio of approximately
-3. Heracovitch [20] showed that certain angle-ply laminates can produce negative through-the-thickness v xz
Poisson’s ratios.
Peel [9] uses the definition of cubical dilatation to show that for a laminate with an incompressible matrix, such as an elastomer, that the relation
1v xy
= v xz
(1) is valid, where v xy
is the major inplane Poisson’s ratio and v xz
is the major through-the-thickness Poisson’s ratio. This assumes that the cubical dilatation is close to zero and is much smaller than the laminate axial strain.
10
8
6
4
-2
-4
2
0
=5
=10
=15
=20
=30
=45
-6
-90 -75 -60 -45 -30 -15 0 15 30 45 60 75 90
Angle (
)
Figure 14. Poisson's ratios for IM7/RP6444,
(V f
=0.4) with a [
] s
lay-up schedule.
This means that the Generation II wing skin should have an approximate thickness-direction Poisson’s ratio of approximately -7, while a less stiff [±30] s
skin would give -2, and a [±45] s
skin should have a v xz approximately zero. Future works will explore these skin characteristics. As noted by Thill et. al. [2] some of the useful properties of auxetic materials to be high energy absorption, fracture toughness, and resistance to indentation. They also state that “Large inplane Poisson’s ratio skins would give anticlastic shapes and negative inplane
7 Copyright © 2008 by ASME
Poisson’s ratio skins would induce synclastic behavior when bent out of plane.” These behaviors have not been noticed in current finite element models, but will be explored in a future work.
Simulation of Generation II Wing
A finite element model of the second generation wing, as shown in Figure 15, has been developed by Madhuri Lingala, a graduate student. The wing skins, wing box all have the dimensions, lay-up and material properties of the fabricated
Gen II wing. Sliding contact elements were used on the lower skin to simulate the sliding skins on the lower wing box and lower tail section. All mechanical properties are found in Table
1.
Table 1. Selected Material Properties
V f
(%)
E
1
MPa,
(psi)
E
2
MPa,
(psi)
υ
12
G
12
MPa, (psi)
IM7/
RP6410*
Carbon/
RP6442*
IM7 graphite fiber
RP6410**
Urethane
RP6442***
Urethane
Typical
Epoxy
42.1
41.8
-
-
-
-
122,000
(17.6x10
6 )
126,600
(18.4x10
6 )
288,890
(41.9x10
6 )
1.65
(239)
6.095
(884)
2096
(304,000)
2.85
(413)
12.02
(1743)
-
-
-
-
0.41
0.41
0.27
0.49
0.49
0.3
0.949
(138)
4.00
(580)
113,736
(16.6x10
6 )
0.549
(79.6)
2.034
(295)
806
(117,000)
* Obtained using Rule of Mixtures. ** Peel dissertation. *** From ref. [7]
Based on the B1 and B2 force versus contraction test results at 40 psi, a force of 100 lbs was applied to 3 nodes in the nose of the wing, simulating the three braided rubber muscle actuators. The nose translated down 1.3 inches and 0.5 inches to the rear, closely matching the deformation shown in Figure
13. The maximum predicted Von Mises stress in any ply is
37,500 psi.
Kikuta [5] suggested that a wing skin should be highly compliant in the chord-wise direction and stiff in the span-wise direction. The Gen II prototype is much stiffer in the chordwise direction for the reasons discussed earlier. Linear and nonlinear simulations for a [±45] s
lay-up were essentially identical and produced too much deformation for the given loads. If the upper and lower wing skin lay-ups were changed to a [±30] s
lay-up, the nose translates down 2.1 inches and 0.95 inches to the rear as shown in Figure 16. This would give more camber, but edge effects are starting to show on the upper skin and the max Von Mises stress in any ply increased to 54,900 psi, which is likely too high. In reality the braided rubber muscle actuators only provide a resistive force, and have a maximum contraction of about 1 inch, and so would not contract as far as shown.
An inplane auxetic laminate of [10/30] s
for the upper and lower skins was simulated. It showed slightly lower displacements but otherwise behaved similar to the model shown in Figure 16. A longer chord-wise model has been created and will be used to simulate the effects of various laminates that might be used in a morphing UAV.
Figure 15. Finite element model of the Gen II wing with current lay-up.
Figure 16. Finite element model of the Gen II wing with [ ±30] s
.
CONCLUSIONS
Two morphing wing prototypes have been fabricated and are being characterized, and a finite element model of the second wing is demonstrated. These wings show excellent angles of deflection, and the Gen II wing shows no buckling or wrinkling of its wing skins. A series of Rubber Muscle
Actuators were developed and refined. The latest braided actuators have functionally gradient properties, produce higher forces than similar filament wound actuators and have not developed air leaks. The upper and lower skins of Gen II show excellent rigidity but elastically camber in a smooth manner.
The second wing is of high enough quality to be used for physical demonstrations or in a wing tunnel. Extremely tough fiber-reinforced elastomers have enabled both the morphing wing skins, their internal actuators and can enable auxetic behavior if needed.
8 Copyright © 2008 by ASME
FUTURE WORK
The Generation II wing will be modified so that the tail and nose will actuate separately and is intended to be tested in a wind tunnel. Aerospace quality fasteners will be used to replace current wood screws. A shape memory polymer resin system has been purchased and will be used to fabricate a series of wing skins and actuators and will be tested on the current Gen
II system. The current finite element model will continue to be used to optimize morphing behavior for the current configuration and future compliant truss-like configurations.
Inplane and through-the-thickness auxetic skins will be explored.
ACKNOWLEDGMENTS
We would like to thank Texas A&M University –
Kingsville for the use of their facilities, especially the
Composites Fabrication Lab; Victor DeLeon for all his great machine work; Krystal Gunter and Royce Coons for their preliminary Maymester work; and the MEEN 4263/64 Senior
Design class for their constructive feedback; also, Juan Rangel for his formatting and Excel plotting expertise.
REFERENCES
[1] Lawlow, M., Oct. 2006, “The Shape of Wings to Come,”
SIGNAL [online journal], www.afcea.org/signal/articles/templates/SIGNAL_Article_Te mplate.asp?articleid=1205&zoneid=56
[2] Thill, C.l, Etches, J., Bond, I., Potter, K. and Weaver, P.,
2008, “Morphing Skins,” The Aeronautical Journal, No.
3216.
[3] FlexSys, 2008. www.flxsys.com/Projects/MACW/
[4] Skillen, M.D., and Crossley, W.A., 2007, “Modeling and
Optimization for Morphing Wing Concept Generation,”
NASA/CR-2007-214860.
[5] Kikuta, M.T., 2003, “Mechanical Properties of candidate materials for Morphing Wings,” Dept. of Mech. Engr,
Virginia Tech, p. 123.
[6] Alderson, K.L., et. al., 2005, “How to Make Auxetic Fibre
Reinforced Composites,” Wiley-VCH, Poznan-Bedlevo,
Poland.
[7] Peel, L.D., Sep. 2006, “Experimental Results of High and
Negative Poisson's Ratio Elastomer-Matrix Laminates,” 3rd
Workshop on Auxetics & Related Systems, Exeter, UK, presentation.
[8] Peel, L.D. , 2007, “Exploration of High and Negative
Poisson’s Ratio Elastomer-Matrix Laminates,” J. Physica
Status Solidi (b) 244, No. 3, 988–1003.
[9] Peel, L.D., Dec. 1998, Fabrication and Mechanics of Fiber-
Reinforced Elastomers, Ph.D. dissertation, Brigham Young
University, Provo, UT.
[10] Rathnam, K.V. and Peel, L.D., May 2004, “Impact Resistant
Fiber-Reinforced Elastomer Composite Materials,” SAMPE
2004, Long Beach CA.
[11] Keshavamurthy, D., Hossakere, K., Peel, L.D. , May 2005,
“Vibration Damping Using High and Negative Poisson's
Ratio Laminates,” SAMPE 2005, Long Beach CA.
[12] C.P. Chou, B. Hannaford, Feb. 1996, 'Measurement and
Modeling of McKibben Pneumatic Artificial Muscles,' IEEE
Transactions on Robotics and Automation, vol. 12, pp. 90-
102.
[13] Klute, G.K., Hannaford, B., June 2000, 'Accounting for
Elastic Energy Storage in McKibben Artificial Muscle
Actuators,' ASME Journal of Dynamic Systems,
Measurements, and Control, vol. 122, pp. 386-388.
[14] Klute, G.K., B. Hannaford, B., Nov. 1998, 'Fatigue
Characteristics of McKibben Artificial Muscle Actuators,'
IROS-98 Proceedings, pp. 1776-82, Victoria, B.C., Canada.
[15] Hossain, M. Z. , May 2003, “Linear Finite Element Analysis of a Rubber Muscle Actuator,” Masters Report, Texas A&M
University – Kingsville, Kingsville, TX.
[16] Shan, Y., and Bakis, C.E., “Flexible Matrix Composite
Actuators,” 20th Annual Technical Conference of American
Society for Composites, Sep., 2005, Philadelphia, PA.
[17] Peel, L.D., Gunter, K., Coons, R., May 2006, “Morphing a
Wing,” Maymester Program, Texas A&M University –
Kingsville, Kingsville, TX, www.engineer.tamuk.edu/ departments/ieen/faculty/DrLPeel/maymester_wing_warp.htm
[18] Peel, L.D., Mejia, J., Thompson, K., Narvaez, B., Dec. 2007,
“Morphing Wing Senior Design Presentation,” Texas A&M
University – Kingsville, Kingsville, TX.
[19] Shadow Robotics, “Technical Specification,” www.shadowrobot.com/airmuscles/techspec.shtml
[20] Heracovitch, C.T., 1984, “Composite Laminates with
Negative Through-the-Thickness Poisson’s Ratios,” Journal of Composite Materials, vol. 18, pp. 447-455.
9 Copyright © 2008 by ASME