Nanorobotic Strategies for Handling and Characterization of
advertisement

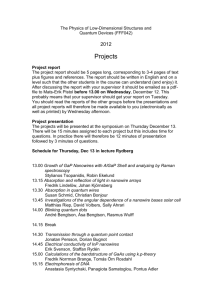
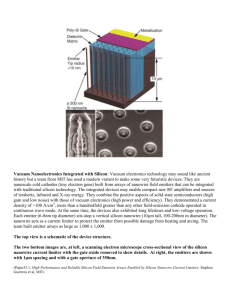
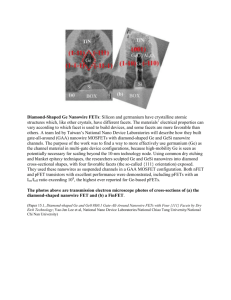
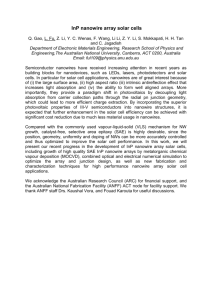
1 Nanorobotic Strategies for Handling and Characterization of Metal Assisted Etched Silicon Nanowires Christian Stolle1, Malte Bartenwerfer1, Caroline Celle2, Jean-Pierre Simonato2 and Sergej Fatikow1, Fellow, IEEE 1 Division Microrobotics and Control Engineering, University of Oldenburg, Germany 2 CEA-Grenoble, LITEN/DTNM/LCRE, France This paper gives insight into nanorobotic handling and electrical characterization of silicon nanowires inside a scanning electron microscope. The synthesis of metal assisted etched, both end doped silicon nanowires is presented. Several nanorobotic pick and place strategies for handling individual nanowires are discussed. Key approaches such as force-based and adhesive bonding (focus ion and electron beam induced deposition) have been realized experimentally and evaluated towards their suitability for automation. Preliminary results on electrical characterization are presented. Index Terms—Nanorobotics, silicon-nanowires, handling strategies, material characterization, electrical characterization I. INTRODUCTION N in general objects with dimensions in the nanometer regime have grown more and more in importance over the last years. Especially carbon nanotubes, different types of metallic, metal-alloy, semi-conducting, and insulating nanowires offer outstanding and partly unique physical properties caused by their atomic configuration and their tiny size, which primarily affects of all the surface-tovolume-ratio. Nanotubes and nanowires are predetermined to improve sensors and even actuators in several ways. This is not related to size, sensitivity, and performance only [1], but also to energy consumption and the prospects of new material properties on the nanometer scale caused by quantum mechanics, such as ballistic electron transport [2]. For these reasons, nanotubes and nanowires are discussed to be crucial parts in novel sensors, actuators, and ICs based on these structures. All application fields of sensors are addressed: temperature, flow, chemistry, biosensors, pressure, strains, resonators, and antennas [3, 4, 5, 6, 7, 8]. Among nanowires, one of the most discussed kinds are silicon nanowires (SiNW). Due to the fact that this material is very well know in the entire microelectronics- and MEMSindustry, several processing and modeling techniques are known and available, mostly for bulk- and surfacemicrofabrication. For most semiconductor products, silicon technology is the basis and therefore, the application of SiNWs add low contamination risk by similar material properties such as thermal expansion. Overall, the interest of SiNWs is reported in several publications over the past few years [9, 10, 11, 12, 13]. Especially, SiNWs are discussed to work as light traps for solar cells [14], tunneling field effects transistors [1], transducers for biological/chemical sensors and first of all transducers for all kinds of nano-electromechanical systems [15, 16]. Despite the growing interest, the high understanding of silicon, and all positive attributes of nanowires, they are hardly ANOMATERIALS Manuscript received April 8th, 2011. Corresponding author: C. Stolle (email: christian.stolle@uni-oldenburg.de). Digital Object Identifier inserted by IEEE used as individual objects, even though all proposed applications would benefit especially from the utilization of single nanowires. Some of the main challenges for a successful and directed application in industrial products still remain. For instance, the techniques for positioning of the aforementioned individual nanowires between two metallic electrodes for electrical characterization in a reproducible way are still in their infancy. In general there are two different approaches to tackle this challenge. The bottom up approach often referred to as selfassembly and the top-down approach that tries to scale down techniques and strategies from the macro world to the nanoworld. Self-assembly strategies that have been applied to this specific challenge are dielectrophoresis [17] and sliding or fluidic motion [18, 19]. Robotic handling of nanowires has been reported in [20, 21]. The rest of this article is organized as follows: Section II describes the microrobotic setup which has been used throughout the handling experiments. The synthesis process of the SiNWs is described in detail in Section III. Different handling strategies are identified and their applicability is discussed based on the experimental results in Section IV. In Section V the main results of the electrical characterization are presented, and finally the article is concluded in Section VI. Fig. 1: Microrobotic set-up for handling and characterization of SiNWs. 2 Fig. 2: In lens Detector image of the doped nanowires. The differently doped regions are visible due to different electron absorption levels. II. EXPERIMENTAL SETUP A nanorobotic system consisting of a coarse and a fine positioning stage (Fig. 1) has been set-up. The coarse positioning stage has three degrees of freedom (DoF). It consists of linear axes, which are arranged as a Cartesian robot system. The z-axis is carrying an endeffector mounting. All three axes are slip-stick-driven with build in optical position sensors. The linear axes offer strokes of 35 mm in the x- and y-direction and 27 mm in the z-direction with a resolution of several nanometers. In contrast to the high velocity and range of the coarse positioning system, the fine positioning system (3 DoF) is based on piezo stacks, and offers a resolution of 1.6 nm. The three orthogonally aligned axes have a maximum stroke of 50x50x50 μm and build in capacitive sensors. Combining a coarse and a fine positioning robot system enables large work space, while keeping high resolutions. These advantages are required for switching between several substrates and still having a high enough resolution for aligning nano-objects. During the experiments the coarse positioning unit was carrying manipulation tools such as grippers and tungsten tips. The different SiNW-substrates and electrical characterization structures were mounted next to each other and on top of the fine positioning stage tilted towards the handling tool (see Fig. 1). The entire system has been modular designed and can be mounted onto the stage of a scanning electron microscope (SEM) chamber. This way, most of the workspace of the SEM stage can be used, including tilting and rotating, to position the robotic setup optimally inside the view of the SEM and towards the SEM’s secondary electron detector. For the force closure handling experiments a LEO 1450 SEM is used. The adhesive bond handling experiments took place in an FEI Quanta 600 SEM. Finally, the ion-beam-based handling experiments took place in a Tescan Lyra 3 fieldemitter SEM with focused ion beam (FIB). layers were deposited in a 200 mm CVD Centura reactor (Applied Materials) via epitaxial growth at 600 °C, using silane (SiH4) and phosphine (PH3) diluted in hydrogen [24]. A stack of three silicon layers is build. The first layer has a thickness of 3µm, is highly phosphorous n-doped (2.1019 at/cm3). The second layer is 5 µm thick and is nonintentionally doped (4.1017at/cm3). The third layer has a thickness of 3µm, and is highly phosphorous n-doped (2.1019at/cm3). The chemicals AgNO3 (99.9%), HF (>40% and 1%), HNO3 (65–68%), H2O2 (30%) and H2SO4 (> 98%) were used, as received from Aldrich without further purification. The aqueous solution HF (10%)/AgNO3 (0.02M) were used for the synthesis of SiNWs. Silicon wafers were cut into 1 cm2 chips and were immersed in a piranha solution (1:3 vol. of H2O2:H2SO4) for 15 min, rinsed with deionised water, and were finally blown dry with argon. Before etching, the chips were cleaned by a 30s dipping in HF 1% at room temperature, followed by rinsing with DI water and drying under argon flow. First, the cleaned silicon chips were immersed into aqueous HF and AgNO3 reactants. The process was carried out at 50°C. After etching, samples were rinsed with diluted HNO3 to entirely remove silver and thoroughly washed with DI water. The morphologies of the samples were observed by SEM (LEO 1530) and the highly doped wire-ends are easily observable in Fig. 2. The density of nanowires was ca. 200 SiNWs.µm-² and the mean diameter ca. 50 nm. IV. HANDLING STRATEGY Robotic handling of nanowires introduces several challenges which are distinct from those in macro robotic handling. For example, the influence of adhesive forces compared to gravity increases, such that gravity is the smallest force starting in the low micrometer scale [25]. Therefore, III. SYNTHESIS OF BOTH END DOPED SINWS Silver assisted electroless etching ) [22, 23] was chosen for the synthesis of Si nanowires (SiNWs), because it is an easy, rapid and straightforward route to make monocrystalline SiNWs in high yield. Four-inch single-polished (100) silicon wafers with doping profiles were used as substrates for the SiNW-fabrication in order to obtain SiNWs bearing two highly doped ends for electrical contact improvement. Silicon Fig. 3: An outline of the SiNW handling task. It consists of four phases. The pick and the place phase depend on the handling strategy. 3 contact areas of materials and tools strongly influence the outcome of pick and place operations. In addition, materials act differently in thin layers. While silicon will brittle break as bulk material during bending, it becomes very flexible in the shape of a nanowire. These challenges need to be addressed for successful manual handling operation and especially automation. Therefore, experiments on several handling strategies have been performed and investigated with different SiNWs and the results are presented in this section. Pick and place operations can be subdivided into four different phases (see Fig. 3): Selection, pick, transport and place phase. During the selection phase a nanowire needs to be identified which fulfills the following requirements: the dimension of the nanowire needs to meet the target’s requirements (e.g. length to fill the gap between two electrodes), and the spacing between the nanowire and the surrounding needs to be large enough to move the handling tool into contact. This task can be time consuming depending on the layout of the nanowire substrate. The nanowires for the handling experiments (Fig. 2) are rather dense. For an automation of the pick and place process a preprocessing of the substrate or a substrate with defined spaces between single nanowires as described [21] would be required. The alignment of tool and nanowire in a way that their relative distance is below 10 µm finalized this step in our experiments. The pick phase itself is tool dependent and described in the following subsections. The transport phase is used to move the tool towards the target structure with the nanowire. In the scope of our experiments the SiNW substrate has been lowered and the target substrate with the four point probe has been moved below the tool. A course z-alignment has been performed such that the distance between the nanowire and the target substrate surface was below 1 µm. The place phase is, similar to the pick phase, tool dependant and is described in the following subsections. The most time consuming steps of the pick and place phase are the fine alignment phases. The uncertainty about the actual z-position leads to lowering the tool towards the substrate or the nanowire stepwise. A. Force Closure Handling Approach The force closure handling experiments have been performed with an electrostatic gripper (FT-G30, FemtoTools) with a maximum opening gap of up to 30 µm and a gripper area of 20µm x 50µm. Fig. 3 (blue area) illustrates the different tasks of the pick and place phases during force closure handling. The pick phase is subdivided into two steps. During the pick step the nanowire is clamped between the gripper jaws. Then in the pull out step the nanowire is separated from the substrate. The most obvious approach is a pull-out movement perpendicular to the substrate surface. However, this method mostly fails because the clamping forces that can be applied by the gripper jaws are smaller than the forces that need to be applied to break the nanowires. The second approach, Fig. 4: Electrostatic microgripper grips a SiNW from the substrate. separation of nanowire and gripper by a shearing-off movement, is theoretically investigated and supposed to apply much higher forces at the nanowires base [20]. In the experimental performance, this approach achieved much better results than the pull-out movement. However, the experiments indicate, that this method cannot be applied to thinner nanowires, since the higher flexibility of thinner wires prevents them from breaking at the bottom. This particular experiment is illustrated in Fig. 4 and shows the aligned gripper and the nanowire before the first task (left) and the gripped nanowire after the second task (right). The outcome of the place phase is less predictable then the grip phase. First, the gripper is opened. Then the nanowire is brought into contact with the target structure. Due to the high adhesive forces and the low gravity influence the SiNWs stick to the gripper surface. Therefore, the nanowire needs to be stripped off the substrate by increasing the adhesive forces between the substrate and the nanowire, until they outweigh the forces between the gripper and the nanowire. However, this process is not predictable and failed during the experiments. A functionalized target structure might overcome this problem. B. Adhesive Bond Handling Approach During the following experiments a tungsten tip was used as manipulation tool. The tips are prepared from a tungsten wire (0.2 µm diameter) and cut into 10 mm long parts which are soldered to a socket. The edges are thinned by etching in NaOH leach. The average tip diameter was about 30 nm. As an additional infrastructure adhesive bond handling requires an SEM equipped with a gas injection system (GIS). This allows injecting different precursor gases through micro capillary tubes. Activated by the energy of the electron beam, this technique facilitates beam-induced etching and beaminduced deposition [26]. The green squares in Fig. 3 indicate the different strategies during adhesive bond handling in the pick and place phases. The pick phase starts with the coarse aligned tip and nanowire. First, the GIS is moved into its working position. The distance of the GIS nozzle and the bond side needs to be such that the 4 Fig. 5: Schematic description of the adhesive bonding handling approach. precursor gas concentration is high enough for a successful deposition, but still far enough that the handling scene can be monitored via the SEM image. In our experiments this distance was at about 400-500 µm. The second step of the pick phase is the actual beam-induced deposition and the subsequent separation of the wire and the substrate. This step is described in more detail in the following sections. The adhesive bond place phase is illustrated in Fig. 5 where a) indicates the pick phase. The tip and the target substrate are aligned and brought into contact. The contact has been detected by visually monitoring the deflection of the wire during surface contact. The nanowire and the target substrate are mechanically and electrically connected by several beaminduced deposition steps (Fig. 5b), one at each contact pad. As precursor gas hexacarbonyltungsten has been employed. The separation step (Fig. 5c) is technology dependant and will be described in the following sections. The final result (Fig. 5d) is a mechanically and electrically connected nanowire, which can be characterized in absence of any disturbing influences (e.g. the STM-tip or the electron beam). A successfully established connection can be detected by measurements of finger-to-finger resistances. C. Fully EBiD-based Handling Experiments During the fully electron beam induced deposition (EBiD) based handling experiments all deposition steps are performed by electron beam and hexacarbonyltungsten as precursor gas. As separation strategy during the pick phase we tried two different approaches. The nanowire and the STM tip are detached by a) electron beam induced etching (EBiE) by fluorine gas or b) by pulling the SiNW out of the substrate. Neither strategy was very reliable. The EBiE strategy suffered from hard to control precursor concentrations at the etching side. The reliability increased when etching at the bottom of the SiNW close to the surface and decreased on freestanding nanowires. The second strategy was hard to control as well, because the break position of the nanowire is hard to predict. While the deposition itself is very stable the wire often broke close to the deposition side because this was the position of the highest stress due to bending forces. During the place phase the welding process allows well directed placing of wire and the electrical connection is Fig. 7: SiNW positioned between the center electrodes of a four point probe. The silicon substrates shows signs of under etching. necessarily established during the tungsten deposition. However, the direction of the etching process is hardly controllable. While the silicon oxide surface layer requires the electron beam for etching. The florin gas itself etches the pure silicon substrate isotropically. The results can be seen in Fig. 7. The dark spots close to the electrodes indicate underetched areas which influences the electrical measurement due to the change in the conductivity of the substrate surface. The most time consuming part of the fully EBiD-based handling is the amount of time required for the deposition or etching process itself. In our experiments we required five to ten minutes for bonding and about three minutes for etching. Another source of delay is the GIS itself which requires outgassing and preheating of precursor reservoirs between switching precursors. D. Ion-Beam-based Handling Experiments During the pick and place phases (Fig. 6) all deposition steps are performed by FIB (Ga+) and tungsten as depositing material. The nanowire and STM tip as well as the nanowire and surface are detached by ion beam cutting (physical Fig. 6: Handling sequence starting from SiNW-substrate (upper left), to the electrical connected nanowire (lower right). Intermediate steps are tungsten tip with SiNW (upper center), target substrate with tungsten tip (upper right), target substrate with tungsten deposition electrical connecting the outer electrodes (lower left) and SiNW connected by a tungsten deposition on one side and connected to the tungsten tip on the other side (lower center). 5 Fig. 8: Final result of the ion beam-based handling experiments. A SiNW is mounted between the inner electrodes of a four point probe. etching). The pick phase and the deposition step in the place phase are similar to the fully EBiD-based approach. Therefore, this handling strategy includes most of the advantages and disadvantages of full EBID-based handling. However, the ion beam-based deposition is very fast and avoids drift problems. Ion cutting is regional without any collateral damage. In addition, it avoids the switching of precursor gases since no fluorine precursor is required and very fast (seconds) due to the physical etching process. However, the instrumental effort is the highest of all methods outlined in this article. The outcome of the FIB-based experiments can be seen in Fig. 8. The SiNW is interconnecting the inner electrodes of the four point probe. The gap between the electrodes is about 5 µm long. The nanowire is electrically connected by squarelike tungsten depositions to the gold electrodes. The outer electrodes are each connected by a wire-like tungsten deposition to the corresponding inner electrode. Some remaining nanowire and bond parts of previous experiments can also be seen. However, they are not electrically connecting the electrodes, so the influence on the electrical measurement can be neglected and all electrical measurement analysis take the state before nanowire placing in account. Small substrate cuts can be seen to the left of the left SiNW-contact deposition, which are due to the FIB etching process. E. Handling Strategy Analysis The main results of the handling experiments are illustrated in Table 1. The risk of contamination of force closure handling is negligible compared to adhesive force handling. For adhesive force handling the deposition itself is a source of controllable contamination. The contamination area can be controlled by setting the area of the beam accordingly. The pick reliability was high for the adhesive bond handling process, and medium for the force closure bonding process. The reason for this estimation is the issue of finding a suitable 1 If possible at all, SiNWs that meet the requirements for gripping are hard to find SiNW which meets the geometric constraints introduced by the gripper. The EBiD- and gripper-based separation step both had similar issues controlling the pull out of the SiNW. The experiments indicate that the strategy is less successful for smaller diameter nanowires than for larger ones. EBIE as described in the previous section suffered from damaging the substrate by under etching. The highest reliability could be achieved by focused ion beam induced etching (FBiE). Both EBiE as well as FBiE have the advantage that no force needs to be applied during separation. The reliability during the place phase was rather undefined during the force closure handling approach. We did not succeed in striking off the nanowire on the contact pads. However, by structuring the contact area such that the gripper does not touch the surface and functionalizing the contact areas of the electrodes by increasing the adhesive forces, it might be feasible to reproducibly place nanowires with a gripper. Due to the under etching and the problem of concentrating the precursor at the surface of the SiNW during EBiE the adhesive bond handling had medium reliability during the separation step. This problem is solved by the focused ion beam induced deposition (FBiD) due to the very defined impact of the ion beam. The time effort for gripper based handling was medium. The extra time was required for finding a suitable SiNW and for separation. The effort for placing the nanowire to the substrate is not taken into account. The EBiD/EBiE-based adhesive bond handling has the most overhead due to the low growth rate of the tungsten depositions and the preheating and cooling of the precursor reservoirs. The FBiD/FBiE-based approach overcame these problems due to the higher growth rate and the very short separation overhead. The electrical contact could not be guaranteed by the force closure handling approach. Due to possible thin oxide layers on the SiNWs as well as a weak mechanical contact the electrical contact is rather undefined. The tungsten depositions in the adhesive bond handling experiments however are conductive and lead to a well defined mechanical and electrical contact between the electrodes and the nanowire. One major drawback of FBiD/FBiE handling is the high instrumental effort. A GIS as well as a FIB is required. The EBiD/EBiE approach is less expensive, however, it still requires the GIS. The gripper handling experiments can take place in a standard SEM and therefore this method is the least Table 1 Main results of the adhesive bond and force closure handling experiments. Contamination risk Pick reliability Place reliability Time effort Electrical contact Instrumental effort Automation of handling Gripper based handling EBiD/EBiE FBiD/FBiE low low1 undefined medium1 undefined low low high medium medium long yes medium medium medium high high small yes high medium Adhesive bond handling 6 1,E-06 1.10-6 1,E-07 1.10-7 5.10-4 5,E-04 1,E-09 1.10-9 4.10-4 4,E-04 -10 1,E-10 1.10 1/2) √IDS (A(A^1/2) Id^1/2 abs(Id) (A) |IDS| (A) 1.10-8 1,E-08 3.10-4 3,E-04 2,E-04 2.10-4 1.10-4 1,E-04 -11 1,E-11 1.10 0 0,E+00 -30 -20 -10 -30 -10 00 Fig. 9: Comparison of the current-voltage characteristics. The curve shows strong diode characteristics before the placement of the nanowire (blue) and more ohmic characteristics after the placing (red). expensive one. However, if we consider that the target structure needs to be designed for gripper based handling, this estimation might change. The automation of the whole handling task strongly depends on the reliability of the different steps. Low or undefined reliability of the gripper based handling makes gripper-based automation rather complicated. The best results can be expected with FIB-based adhesive bond handling. If we consider the scalability of these three approaches gripper based handling has a rather limited scalability. While down-sizing of the gripper is possible, the applicable force also decays [27]. In contrast, the FIB has a medium scalability. While etching is still possible at smaller structures the deposition areas might not be much smaller due to the reversing effects of material abrasion and deposition at smaller deposition areas. The solution could be a mixed method of EBiD and FBiE, because EBiD can deposit smaller structures and is only limited by the diameter of the electron beam impact area [28]. V. ELECTRICAL CHARACTERIZATIONS An electrical characterization of the four-finger-sample is performed before and after the placement of the nanowires. Thus, the already semiconducting-behavior of the underlying substrate can be subtracted in order to determine the nanowire’s resistivity. Fig. 9 shows the current-voltage characteristics of the fourfinger sample with and without placed nanowires. The fourfinger alone has a distinct diode-behavior caused by silicon of the four-finger-smple carrier. After the placement of the SiNW, the diode-characteristic almost vanishes and an ohmiccurve is measured. The resistivity of the nanowires can be estimated by the difference of these measurements and amounts to about 4 kΩ. The ohmic characteristic of the nanowires measurement confirms that the connected part of the wire consists of intrinsic silicon only. Another device was fabricated in order to investigate the SiNW as a standard field effect transistor in a bottom gate–top contact geometry. They were made up of SiNWs, 30 10 20 30 VVg GS (V) -12 1,E-12 1.10 -30 -30 -20 -20 -10 -10 00 10 10 20 20 30 30 Vg (V) VGS (V) Fig. 10: Transfer characteristic of localized SiNW field effect transistor in the linear regime (VDS = -10 V). mechanically handled onto highly As-doped silicon substrates, and also used as gate electrodes, coated with 200 nm of thermal SiO2 as a dielectric. Ti/Au (10/50nm) source and drain pads were used. Fig. 10 exhibits the electrical characterization of the undoped part of one nanowire bridging the channel. Due to the nanowire release procedure, Tungstenbased FIB top contacts pads are used. It clearly shows a field effect transistor behavior. This device has exhibited effective mobility of 6 cm².V-1.s-1, Ion/Ioff ratio of 2.105, Off current of 1.10-12A and subtreshold slope of 1V/dec. Same performances have been reported in the litterature on non flexible substrate [29]. These first preliminary promising results demonstrate that it is possible to fabricate SiNW-based FET with the mechanical handling procedure. Further experiments are ongoing to improve this issue. VI. CONCLUSION AND FUTURE WORK Throughout this paper we addressed several key challenges related to robotic handling of single SiNWs. The synthesis of both end doped SiNWs has been presented. A robotic handling station for SiNWs has been setup inside the vacuum chamber of an SEM/FIB. Several pick and place strategies have been discussed in detail and their results are presented in Section IV. The experience gathered in the different handling sequences and techniques reveals that deposition-based techniques are a very promising approach, due to the controllability of the tiny particles and the reliable electrical and mechanical junction. An automation of the handling sequences could be possible and would be a tremendous improvement of the experiment‘s most time consuming elements such as alignment of endeffector and SiNW as well as selection of a suitable SiNW. Due to its reliability, FBiD/FBiE-based adhesive bond handling has been identified as the most promising handling technique for automation. 7 First preliminary yet promising electrical measurements on mechanically handling nanowire were performed. As main result, the resistivity of the intrinsic part of the nanowires is determined by a high sensitive measurement engaging sensor lead, while almost no diode characteristic could be discovered. However, in order to improve the electrical characterization results, the length of the nanowire has to be much longer than the width of the four-finger-probe. This would enable a real four-terminal sensing measurement. Therefore, specific SiNWs etching has to be developed to allow easy handling and picking of isolated and well organized nanowires [30]. Moreover surface functionalization should be considered for gripping and releasing the nano-objects [31]. Further improvement with automated localization systems can allow us to develop new electronic SiNW-based devices such as sensors [13]. [14] [15] [16] [17] [18] ACKNOWLEDGMENT This research was supported in part by the European integrated project Hydromel NMP2-CT-2006-026622. [19] [20] REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] M. T. Björk, J. Knoch, H. Schmid, H. Riel, and W. Riess, “Silicon nanowire tunneling field-effect transistors,” Applied Physics Letters, vol. 92, no. 19, p. 193504, 2008. [Online]. Available: http://link.aip.org/link/?APL/92/193504/1 A. Krüger, Neue Kohlenstoffmaterialien - Eine Einführung, ser. Studienbücher Chemie. Teubner, 2007, vol. XIII. N. Sinha, J. Ma, and J. T. W. Yeow, “Carbon Nanotube-Based Sensors,” Journal of Nanoscience and Nanotechnology, vol. 6, p. 573–590, 2006. [Online]. Available: http://biomems.uwaterloo.ca/papers/JNN.pdf U. Yogeswaran and S.-M. Chen, “A Review on the Electrochemical Sensors and Biosensors Composed of Nanowires as Sensing Material,” Sensors, vol. 8, pp. 290–313, 2008. K. L. Ekinci, “Electromechanical transducers at the nanoscale: Actuation and sensing of motion in nanoelectromechanical systems (nems),” small, vol. 1, pp. 786–797, July 2005, review. A. K. Hüttel, G. A. Steele, B. Witkamp, M. Poot, L. P. Kouwenhoven, and H. S. J. van der Zant, “Carbon Nanotubes as Ultrahigh Quality Factor Mechanical Resonators,” Nano Letters, vol. 9, no. 7, pp. 2547– 2552, 2009. C. Rutherglen and P. Burke, “Nanoelectromagnetics: Circuit and electromagnetic properties of carbon nanotubes,” Small, vol. 5, no. 8, pp. 884–906, 2009. [Online]. Available: http://dx.doi.org/10.1002/smll.200800527 I. Popov, S. Gemming, S. Okano, N. Ranjan, and G. Seifert, “Electromechanical switch based on mo6s6 nanowires,” Nano Letters, vol. 8, no. 12, pp. 4093–4097, 2008. [Online]. Available: http://pubs.acs.org/doi/abs/10.1021/nl801456f Y. Cui and C. M. Leiber, “Functional nanoscale electronic devices assembled using silicon nanowire building blocks,” Science, vol. 291, pp. 851–853, 2001. [Online]. Available: 10.1126/science.291.5505.851 W. Lu and C. M. Lieber, “Nanoelectronics from the bottom up,” Nature Materials, vol. 6, no. 11, pp. 841–850, November 2007. [Online]. Available: http://dx.doi.org/10.1038/nmat2028 B. K. Teo and X. H. Sun, “Silicon-based low-dimensional nanomaterials and nanodevices,” Chemical Reviews, vol. 107, no. 5, pp. 1454–1532, 2007. [Online]. Available: http://pubs.acs.org/doi/abs/10.1021/cr030187n L. J. Chen, “Silicon nanowires: the key building block for future electronic devices,” J. Mater. Chem., vol. 17 (44), pp. 4639–4643, 2007. [Online]. Available: http://dx.doi.org/10.1039/B709983E S. Clavaguera, A. Carella, L. Caillier, C. Celle, J. Pecaut, S. Lenfant, D. Vuillaume, and J. Simonato, “Sub-ppm detection of nerve agents [21] [22] [23] [24] [25] [26] [27] [28] [29] using chemically functionalized silicon nanoribbon field-effect transistors.” Angewandte Chemie Int. Ed., vol. 49, pp. 1–5, 2010. E. Garnett and P. Yang, “Light trapping in silicon nanowire solar cells,” Nano Letters, vol. 10, no. 3, pp. 1082–1087, 2010, pMID: 20108969. [Online]. Available: http://pubs.acs.org/doi/abs/10.1021/nl100161z G. Zheng, X. P. A. Gao, and C. M. Lieber, “Frequency domain detection of biomolecules using silicon nanowire biosensors,” Nano Letters, vol. 10, no. 8, pp. 3179–3183, 2010. [Online]. Available: http://pubs.acs.org/doi/abs/10.1021/nl1020975 R. He, X. L. Feng, M. L. Roukes, and P. Yang, “Self-transducing silicon nanowire electromechanical systems at room temperature,” Nano Letters, vol. 8, no. 6, pp. 1756–1761, 2008, pMID: 18481896. [Online]. Available: http://pubs.acs.org/doi/abs/10.1021/nl801071w M. Lu, M.-W. Jang, G. Haugstad, S. A. Campbell, and T. Cui, “Wellaligned and suspended single-walled carbon nanotube film: Directed self-assembly, patterning, and characterization,” Applied Physics Letters, vol. 94, no. 26, p. 261903, 2009. [Online]. Available: http://link.aip.org/link/?APL/94/261903/1 X. Duan, C. Niu, V. Sahi, J. Chen, J. W. Parce, S. Empedocles, and J. L. Goldman, “High-performance thin-film transistors using semiconductor nanowires and nanoribbons,” Nature, vol. 425, pp. 274– 278, Sep. 2003. [Online]. Available: http://www.sciencedirect.com/science/article/B6WVB-49KTGDS-1FR/2/bb298bab2434024333844f44914c9f3a G. Yu, A. Cao, and C. Lieber, “Large-area blown bubble films of aligned nanowires and carbon nanotubes.” Nature Nanotechnology, vol. 2, no. 6, p. 372, 2007. K. N. Andersen, D. H. Petersen, K. Carlson, K. Molhave, O. Sardan, A. Horsewell, V. Eichhorn, S. Fatikow, and P. Bøggild, “Multimodal electrothermal silicon microgrippers for nanotube manipulation,” IEEE Transactions on Nanotechnology, vol. 8, no. 1, pp. 76–85, January 2009. T. Wich, C. Stolle, O. Frick, and S. Fatikow, “Automated NanoAssembly in the SEM I: Challenges in setting up a warehouse,” in Proceedings of the 17th International Federation of Automatic Control world congress, Seoul, pp. 12751–12756. N. Megouda, R. Douani, T. Hadjersi, and R. Boukherroub, “Formation of aligned silicon nanowire on silicon by electroless etching in hf solution,” Journal of Luminescence, vol. 129, no. 12, pp. 1750 – 1753, 2009, special Issue based on The 15th International Conference on Luminescence and Optical Spectroscopy of Condensed Matter (ICL’08). [Online]. Available: http://www.sciencedirect.com/science/article/B6TJH-4WB3NJB-1/2/0016d2235d4b9754e306ca3fcff17083 K. Peng, H. Fang, J. Hu, Y. Wu, J. Zhu, Y. Yan, and S. Lee, “Metalparticle-induced, highly localized site-specific etching of si and formation of single-crystalline si nanowires in aqueous fluoride solution,” Chemistry – A European Journal, vol. 12, no. 30, pp. 7942–7947, 2006. [Online]. Available: http://dx.doi.org/10.1002/chem.200600032 S. Bozzo, J.-L. Lazzari, C. Coudreau, A. Ronda, F. A. d’Avitaya, J. Derrien, S. Mesters, B. Hollaender, P. Gergaud, and O. Thomas, “Chemical vapor deposition of silicon-germanium heterostructures,” Journal of Crystal Growth, vol. 216, pp. 171–184(14), 15 June 2000. [Online]. Available: http://www.ingentaconnect.com/content/els/00220248/2000/00000216/00000001/art00429 R. S. Fearing, “Survey of Sticking Effects for Micro Parts Handling,” in Proc. of IEEE/RSJ Intl. Conference on Intelligent Robots and Systems, Pittsburgh, PA, USA, 1995, pp. 212–217. T. Wich, T. Luttermann, and I. Mircea, “Hardness determination of EBiD-layers containing tungsten and cobalt,” in 3rd Int. Conference On Computational Methods And Experiments In Materials Characterisation III, Bologna, Italy, June 2007, pp. 73–82. T. Wich, Werkzeuge und Methoden zur Automatisierung der seriellen Nanomontage im Rasterelektronenmikroskop. Logos Berlin, Oktober 2008, vol. 1. I. Utke, P. Hoffmann, and J. Melngailis, “Gas-assisted focused electron beam and ion beam processing and fabrication,” Journal of Vacuum Science & Technology B: Microelectronics and Nanometer Structures, vol. 26, no. 4, pp. 1197–1276, 2008. [Online]. Available: http://scitation.aip.org/getabs/servlet/GetabsServlet?prog=normal&id=JVTBD900002600000400119700000 1&idtype=cvips&gifs=yes C. Celle, A. Carella, D. Mariolle, N. Chevalier, E. Rouviere, and J.-P. Simonato, “Highly end-doped silicon nanowires for field-effect 8 transistors on flexible substrates,” Nanoscale, vol. 2, pp. 677–680, 2010. [Online]. Available: http://dx.doi.org/10.1039/B9NR00314B [30] S.-W. Chang, V. P. Chuang, S. T. Boles, C. A. Ross, and C. V. Thompson, “Densely packed arrays of ultra-high-aspect-ratio silicon nanowires fabricated using block-copolymer lithography and metalassisted etching,” Advanced functional materials, vol. 19, pp. 2495– 2500, 2009. [31] C. Suspene, R. Barattin, C. Celle, A. Carella, and J.-P. Simonato, “Chemical functionalization of silicon nanowires by an electroactive group: A direct spectroscopic characterization of the hybrid nanomaterial,” The Journal of Physical Chemistry C, vol. 114, no. 9, pp. 3924–3931, 2010. [Online]. Available: http://pubs.acs.org/doi/abs/10.1021/jp912118m