Multi-beam Maximum Likelihood Estimation of Target Angle of Arrival

Maximum Likelihood Estimation (MLE) of Target Direction in a Digital Beamforming (DBF) Radar System
—
David J. Murrow
12/16/2012
1
Abstract
The advent of affordable digital beamforming (DBF) receiver/downconverter/analog-to-digital
(A/D) converter technology is enabling more sophisticated signal processing algorithms to be used in future radar systems. These include optimal algorithms for finding the angular direction of a detected/tracked target in space. In this paper, sophisticated DBF-based signal processing algorithms are developed for this purpose and analyzed for performance. These employ the technique of Maximum Likelihood Estimation (MLE) to find the target direction. Algorithms derived include the Full Array MLE, where the digitized received data directly from the antenna array elements are used to derive the MLE, and also various Multiple Beam MLEs, where the digital outputs from a fixed set (cluster) of pre-formed beams are used to derive the MLE.
The accuracy performance of each of the several MLE approaches is quantified in terms of its
Root-Mean-Square-Error (RMSE) and compared to that of the conventional delta/sum monopulse approach used in many of today’s radars. In this paper it is established that the Full Array MLE provides the best possible accuracy for targets both on and off beam boresight. It is also shown that the Multiple Beam MLE approaches can provide accuracy performance either better or worse than conventional monopulse, depending on the nature, placement, and number of beams processed in the MLE.
Key Words
Radar, antenna array, digital beamforming (DBF), signal processing, maximum likelihood estimation (MLE), target direction, optimal algorithms, multiple beam, full array, conventional monopulse, accuracy, RMSE.
2
Table of Contents
1.0
Introduction
2.0
Conventional Monopulse Processing
2.1
Performance of Conventional Monopulse Processing
2.1.1
Uniform Sum, Linear Odd Delta Performance
2.1.2
Taylor Sum, Bayliss Delta Performance
2.1.3
Effect of Transmit Beam Broadening/Spoiling on Performance
3.0
Digital Beamforming (DBF) Radar and Maximum Likelihood Estimation (MLE)
3.1
Full Array DBF MLE Processing
3.1.1
Full Array MLE Accuracy Performance
3.1.2
Effect of Transmit Beam Spoiling on Full Array MLE
Performance
3.2
Multiple Beam DBF MLE Processing
3.2.1
Multiple Independent Receive Sum Beam MLE Performance
3.2.1.1
Two Independent Uniform Sum Beam MLE Performance
3.2.1.2
Transmit Beam Broadening/Spoiling on Two Beam MLE
Performance
3.2.1.3
Three Uniform Sum Beam MLE Performance
3.2.2
Sum and Delta Beam Pair MLE Performance
3.2.2.1
Two Independent Receive Beam MLE; Uniform Sum,
Linear Odd Delta
3.2.2.2
Two Independent Receive Beam MLE; Taylor Sum,
Bayliss Delta
3.2.2.3
Six Receive Beam DBF MLE; Three Pairs of Uniform
Sum, Linear Odd Delta
3.2.3
Subarrayed MLE Performance
3.2.3.1
Two Adjacent Non-Overlapped (Independent) Subarray
DBF MLE—21 Elements Each
3.2.3.2
Seven Adjacent Non-Overlapped (Independent) Subarray
DBF MLE—6 Elements Each
3.2.3.3
Three Sum Beam DBF MLE from Seven Overlapped
Subarrays of 24 Elements Each
4.0
Summary of Results
5.0
Conclusions
6.0
Recommendations for Future Work
7.0
Appendices
Appendix 1 Cramer-Rao Bound for Full Array MLE Accuracy
Appendix II “Exact” Conventional Monopulse Accuracy via Monte Carlo vs
High SNR Approximate Accuracy Performance
8.0
References
3
Maximum Likelihood Estimation(MLE) of Target Direction in a Digital Beamforming (DBF) Radar System
— D.J. Murrow
1.0
Introduction
The development of low cost high performance coherent receiver/downconverters and analog-todigital (A/D) converter technology in recent years has opened the door to the implementation of digital beamforming (DBF) in radar systems. Amongst the many advantages of DBF in radar is the ability to apply advanced digital signal processing algorithms such as maximum likelihood estimation (MLE) to more acurately determine target echo direction using the digitized array receive data.
The primary objective of this paper is to quantitatively compare the performance of DBF
MLEs of target direction to that of a conventional delta/sum monopulse system. Full array DBF MLE and multiple-beam DBF MLEs are examined and compared in performance.
In actual radar systems, angle/direction estimation is only done on detected targets. This is implicitely understood, though not shown, in the analyses to follow in this paper.
Furthermore, detected targets are analyzed for direction within a radar resolution cell
(range, azimuth, elevation, and/or Doppler). Multiple simultaneous targets within a radar resolution cell are not considered in this paper. Also not addressed are targets in the near field of the radar antenna, as this is not a typical scenario in a radar system.
Microwave radars typically employ deterministic narrowband waveforms and processing, and so the direction finding techniques and associated accuracies analyzed herein address only the narrowband deterministic signal case.
The conventional delta/sum monopulse system is defined and analyzed for performance first, so as to establish a baseline of performance for comparison.
2.0 Conventional Monopulse Processing
In a conventional monopulse processing radar, two simultaneous receive beams are formed in an array RF analog beamformer, both steered in the same direction as the transmit beam. Furthermore, the transmit beam is typically uniformly illuminated, so that for a linear array, with elements uniformly spaced at d y
, y n
d y
[
( N
1 ) / 2
n
1 ] , the transmit beam shape is g
T
( T y
)
snic
N
( T y d y
/
0
) , where T y
is the direction cosine of the target angle relative to the array. Of course, the actual array might be two-dimensional, so that both directions may be estimated, but a linear array aligned with the y-axis is used as a mathematical device in this paper to simplify the analysis. The “sum” receive beam is formed as an even-symmetry weighted sum of the elemental received data and the “delta” or “difference” beam is formed as an odd-symmetry weighted sum of the elemental received data. These beams are then brought through receiver/ downconverters to inphase and quadrature (I+jQ) baseband complex signals. These signals are then processed
4
in one of two equivalent ways: 1) The signals are first match filtered and then A/D smapled at the range-time of the target, or 2) The signals are first A/D sampled and then digitally match filtered and sampled at the range-time of the target. In either case, the resultant two complex samples constitutes the beam output data to be monopulse processed.
Thus, the two beam samples are r
w
T
r
and r
w
T
r
, where r
complex vector of elemental (noise-corrupted) received data samples,
vector of sum beam weights, and w
is the N x 1
w
is an N x 1
is an N x 1 vector of delta beam weights. The sum beam weights are real and even w n
=w
(N-n+1)
and the delta beam weights are imaginary
||
w
||
||
w
n
||
=-w
1
(N-n+1)
, and also, without loss of generality, normalized for unity norm,
. The superscript “T” above is used throughout this paper to denote the vector or matrix transpose operation.
The monopulse estimate of target direction (re boresight) is then formed from the algorithm
( T y
)
w
T
T
ˆ y
( T y
) f
1
(Re{ r
, and
( T y
/
) r
}) where f ( T y
)
( T y
) /
( T y is the N x 1 vector of cissoids
) , exp( j
2
(
T y
T y
) y
n
/
w
T
0
)
( T y
) ,
. To further simplify the analysis, the beams are taken to be steered to array broadside. The extension to the off-broadside case is not difficult, and is left to the reader.
This conventional delta/sum monopulse processing is illustrated in Figure DJM-1
Figure DJM-1 Array and Signal Processing for Conventional Delta/sum
Monopulse
The function f(T y
) is the ratio of two real known antenna patterns, f ( T y
)
( T y
) /
( T y
) , and is hence a known function of the target echo incident direction. The monopulse processor thus performs essentially a table look-up of the estimate of target direction, given the observed value of Re{r /r }.
5
2.1 Performance of Conventional Monopulse Processing
The performance of the conventional delta/sum monopulse processing is quantified in terms of the bias and RMSE of the direction estimate. This performance is now analyzed,
The Nx1 complex vector of elemental received data is r
Ag
T
( T yT
)
( T yT
)
n , where
T yT
is the actual target direction. Thus, the delta beam output is given by r
w where
T
r
(
T yT
Ag
)
T
( T yT
w T
)
w
T
( T yT
( T yT
)
)
and
w n
T
n
w
T
Ag
n .
T
( T yT
)
( T yT
)
n
Also, the sum beam output is where
( T yT
)
w
T
( T yT
) and r
n
w
T
w
T
r
n
.
Ag
T
( T yT
)
w
T
( T yT
)
w
T
n
Ag
T
( T yT
)
( T yT
)
n
The statistics of the complex Gaussian random variables are independent and zero mean, i.e., E { n
}
w
T
E
{ n }
0
E { n
}
w
T
E
{ n } . and
E
E
E
{|
{|
{ n n n
n
*
|
|
2
2
}
}
}
w
T
w
T
w
T
E
{ n
E { n n
n
E { n n
} w
} w
*
*
}
w
*
2
2
2
2 n
||
2 n
2 n
w
||
T
w
w
w
*
||
2
||
2
2
n
2
2
n
2
The apostrophe notation above (e.g. n
) is used throughout this paper to denote the matrix or vector complex conjugate transpose operation. (Other authors have also used a superscript “H” for this operation).
Substituting these results into the conventional delta/sum estimation algorithm yields
T
ˆ yT
f
1
(Re{( Ag
T
( T yT
)
n
) /( Ag
T
( T yT
)
n
)}) or f ( T
ˆ yT
)
Re{ f ( T yT
)
n
/ Ag
T
( T yT
)) /( 1
n
/ Ag
T
( T yT
))}
To simplify the notation in the above equation, define
n
/ Ag
T
( T yT
) , and recall that f ( T yT
)
( T yT
) /
( T yT
) n
/
, so
Ag
T
( T yT
) , f ( T
ˆ yT
)
Re{( f ( T yT
)
) /( 1
)} .
When the signal-to-noise ratio is high, these two newly defined error terms are small.
Then to a good approximation, neglecting yet smaller product error terms,
Re{( f ( T yT
)
) /( 1
)}
Re{ f ( T yT
)
f ( T yT
)
} , or with x
Re{
} and x
Re{
} ; f ( T
ˆ yT
)
f ( T yT
)
x
f ( T yT
) x
6
It is reasonable to suppose that the above estimate of target direction, T
ˆ , deviates from yT the actual target direction T yT by a small amount, say
Ty
, i.e., that T
ˆ yT quantity
Ty
is termed the estimation error. Then f ( T yT
Ty
)
f ( T yT
)
x
f ( T yT
) x
T yT
Ty
. The
Expanding the left side of this equation in aTaylor series about T yT
and neglecting higher powers of the estimation error gives f ( T yT
)
f
( T yT
)
Ty
f ( T yT
)
x
f ( T yT
) x
Solving for the estimation error gives
Ty
( x
f ( T yT
) x
) / f
( T yT
) .
This last equation shows that the conventional delta/sum estimate of target direction is unbiased, i.e., E {
Ty
}
E { x
f ( T yT
) x
} / f
( T yT
)
0 , because the noise terms are zero mean.
The variance of the estimate is
2
T
ˆ y
var{
Ty
}
(var{ x
}
f
T
2 var{ x
}
2 f
T cov ar { x
x
}) / or, using the definitions of x and x
2
T
ˆ y
n
2
|| w
f
T w
||
2
/ | A
T
|
2 g
2
T f
T
2 f
T
2
This expression for the estimate error variance, also the mean-square-error (MSE) for the unbiased estimate, may be placed into the form
2
T
ˆ y
1 /(
2
2 SNR ) , from which the rootmean-square-error (RMSE) may be written as
T
ˆ y
1 /(
2 SNR ) .
There are several ways in which the various component factors may be allocated to the two factors, the sensitivity factor
and the SNR.
In one approach, the SNR in the RMSE expression is the expected average (offboresight) SNR of the target echo in a transmit/receive sum beam steered to the search beam position. If this particular SNR is denoted as SNR
T
, then SNR
T
| A
T
|
2 g
T
2
/ 2
n
2 and
T
| f
T
| / || w
f
T w
|| .
The quantity
T is herein termed the conventional delta/sum monopulse sensitivity factor.
Note that it is a function of target direction.
Another way to allocate factors is to use the boresight sum beam SNR
T0
in the RMSE expression.
7
In this case, SNR
T 0
| A
T 0
|
2 g
T
2
0
/ 2
n
2
and
T
| g
T
T
/ g
T 0
T 0
|| f
T
| / || w
f
T w
|| .
This approach puts all of the target direction dependent factors into the sensitivity factor, and none in the SNR factor.
Either approach is valid, and the literature is not consistent in the associated terminology, especially with respect to the term “monopulse sensitivity”, and “monopulse sensitivity factor”.
In the interest of completeness, there are yet a third and fourth way of allocating the factors. In these approaches, the RMSE is first written in the form
T
ˆ y
(
0
/ L y
) /(
2 SNR ) .
This form tends to show the frequency dependence of the RMSE explicitly, because the sensitivity factor
is also usually independent of frequency.
Then depending on whether the off-boresight or boresight target echo SNR is used, the sensitivity factor becomes either
T
(
0
/ L y
) | f
T
| / || w
f
T w
|| or
T
(
0
/ L y
) | g
T
T
/ g
T 0
T 0
|| f
T
| / || w
f
T w
||
In this paper it will be apparent from the text or data which of the above approaches is being taken.
Recall f
T
f ( T yT
)
( T yT
) /
( T yT
) , so f
T
f
( T yT
)
( T yT
) /
( T yT
)
( T yT
) /
2
( T yT
)
Also recall that
( T y
)
w
T
( T y
) , so that
( T y
)
w T
( T y
)
n
N
1
( j 2
y n
/
0
) w
n exp( j 2
y n
T y
/
0
) .
Some special cases often encountered in conventional monopulse processing are now considered.
Case 1: Suppose the monopulse receive beams are orthonormal, in the sense that w
T
w
*
0 and || w
||
|| w
||
1 . Then the conventional delta/sum monopulse sensitivity factor becomes
T
| f
T
| /( 1
f
T
2
)
1 / 2
.
Case 2: Suppose the target is at the boresight of the beams. Then the target echo SNR becomes SNR
T
| A
T 0
|
2 g
T
2
0
/ 2
n
2
, where
T 0
n
N
1 w
n
and (typically) g
T0
=1.
8
The conventional delta/sum monopulse boresight sensitivity becomes
T 0
| f
T 0
| / || w
f
T 0 w
||
| f
T 0
|
|
T 0
| /
T 0
| n
N
1
2
y n w
n
/
0
| / n
N
1 w
n
.
Case 3 : Suppose the monopulse beams are uniformly illuminated sum and linearly odd weighted imaginary delta, i.e., w
n
1 / N and w
n
jy n
/ || y || . This makes the sum delta pair orthogonal with SNR
TU
| A
TU
| 2 g
T
2 / 2
n
2
and
TLU
| f
TLU
| /( 1
f
2
TLU
)
1 / 2
, where f
TLU
TL
/
TU
( n
N
1 jy n exp( j 2
T yT y n
/
0
) / ||
y ||) /( n
N
1 exp( j 2
T yT y n
/
0
) / N ) .
Case 4 : Suppose the monopulse beams are uniformly illuminated sum and linearly odd weighted imaginary delta, i.e., w
n
1 / N and w
n
jy n
/ || y || , and the target is on the boresight of the beams. This makes the sum delta pair orthogonal with
SNR
TU 0
| A
TU 0
|
2 g
T
2
0
/ 2
2 n
| A |
2
N / 2
n
2
and
TLU 0
| f
TLU 0
|
|
L 0
| /
U 0
2
||
y || / N
0
, where f
TLU 0
L 0
/
U 0
N
(
n
1 jy n
) /(||
y || N )
0 .
For example, suppose N=42 and d=0.5*
0
. Then
TLU 0
2
d ||
n
( N
1 ) / 2
1 || / N
0
||
n
21 .
5 || / 41
38 .
079
Suppose additionally that the target echo SNR at the boresight of a uniformly illuminated receive sum beam is SNR
TU 0
100 ( 20 dB ) , Then
T
ˆ y
1 /(
TLU 0
2 SNR
TU 0
)
1 /( 38 * 10 * 1 .
4142 )
0 .
0019
1 .
9 msines.
The target echo SNR in a uniformly illuminated sum beam may be written in terms of this reference boresight SNR as
SNR
TU
| A
TU
|
2 g
T
2
/ 2
2 n
SNR
TU 0
|
TU g
T
|
2
/ |
TU 0 g
T 0
|
2
SNR
TU 0
|
TU g
T
|
2
/ N and in a general sum beam as
SNR
T
| A
T
|
2 g
T
2
/ 2
n
2
SNR
TU 0
|
T g
T
|
2
/ |
TU 0 g
T 0
|
2
SNR
TU 0
|
T g
T
|
2
/ N
2.1.1
Uniform Sum, Linear Odd Delta Beam Performance
The various performance parameters of a conventional uniform sum( odd ( w
n
jy n
/ || y || w
n
1 / N )-linear
) delta monopulse system, including the monopulse accuracy
(RMSE) is shown in Figures DJM-2 though 6 below for an example system with
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB.
9
Figure DJM-2 Monopulse Ratio for Conventional Monopulse Example
Uniform Weighted Sum, Linear Odd Imaginary Weighted Delta
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Figure DJM-3 Derivative of Monopulse Ratio for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Uniform Weighted Sum, Linear Odd Imaginary Weighted Delta
10
Figure DJM-4 Monopulse Sensitivity for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Uniform Weighted Sum, Linear Odd Imaginary Weighted Delta
Figure DJM-5 Signal-to-Noise Ratio (SNR) for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Uniform Weighted Sum, Linear Odd Imaginary Weighted Delta
11
Figure DJM-6 Monopulse Accuracy (RMSE) for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Uniform Weighted Sum, Linear Odd Imaginary Weighted Delta
Note from the above figures that the direction finding accuracy is best for a target at boresight (1.9msines), and degrades substantially as the actual target direction is farther off-boresight.
2.1.2
Taylor Weighted Sum, Bayliss Weighted Delta Beams
Often it is desireable to weight the monopulse beams in order to reduce the beam sidelobes. This provides a measure of protection from sidelobe interference sources.
The direction finding performance parameters of a conventional Taylor weighted
(SLR=30dB, nbar=6) sum and Bayliss weighted delta monopulse system, including the monopulse accuracy (RMSE) is shown in Figures DJM-7 though 11 below for the same example system with
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB.
12
Figure DJM-7 Monopulse Ratio for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Taylor, Bayliss Weighting: nbar=6, SLR=30dB
Figure DJM-8 Derivative of Monopulse Ratio for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Taylor, Bayliss Weighting: nbar=6, SLR=30dB
13
Figure DJM-9 Monopulse Sensitivity for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Taylor, Bayliss Weighting: nbar=6, SLR=30dB
Figure DJM-10 Signal-to-Noise Ratio (SNR) for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Taylor, Bayliss Weighting: nbar=6, SLR=30dB
14
Figure DJM-11 Monopulse Accuracy (RMSE) for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Taylor, Bayliss Weighting: nbar=6, SLR=30dB
Figure DJM-12 Monopulse Accuracy (RMSE) for Conventional Monopulse Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Uniform Sum Beam Weighting, Linear Odd Imaginary Delta Beam Weighting
Taylor, Bayliss Weighting: nbar=6, SLR=30dB
15
This last figure (Figure DJM-12) compares monopulse accuracy for the two different sets of conventional Delta/Sum beam pairs: 1) Uniform Sum, Linear Odd Imaginary Delta weighting and 2) Taylor, Bayliss nbar=6, SLR=30dB weighting. The figure shows that the former gives better monopulse accuracy at all directions re boresight. At boresight
(Ty=0), the Taylor, Bayliss monopulse pair gives an accuracy of 2.4msines. The corresponding performance of the Uniform, Linear Odd monopulse pair at boresight is better at 1.9msines. This 21-26% difference in boresight accuracy performance must often be traded against beam sidelobe levels/protection.
2.1.3
Effect of Transmit Beam Broadening/Spoiling on Monopulse Performance
The transmit beam shape has a significant effect on the overall accuracy performance of the monopulse system, through the SNR factor. Figure DJM-13 shows the effect on the
SNR of broadening (spoiling) the transmit beam by a factor of 2.
Figure DJM-13 Effect of Transmit Beam Shape/Spoiling on Conventional MP SNR
The boresight SNR is reduced by a factor of 2 (3dB) while the beamwidth is broadened by a factor of 2.
The effect of the 2:1 broadening/spoiling of the transmit beam on the conventional linear odd imaginary delta/uniform sum MP Accuracy is shown in Figure DJM-14.
16
Figure DJM-14 Effect of Transmit Beam Shape/Spoiling on Conventional MP
RMSE Accuracy
The boresight accuracy is degraded by a factor of 2
1/2
(2.62msines/1.86msines) while the off-boresight accuracy is improved. The crossover in the above example occurs where
Ty=.024, which corresponds to approximately 0.5
0
/L.
Conventional Monopulse can be implemented by analog RF beamformers or by Digital
Beamformers in a DBF radar. From a theoretical performance point of view, there is no difference. However, DBF radars can also execute Maximum Likelihood Estimation
(MLE), whereas analog beamformers cannot. DBF Radar with MLE is next considered.
17
3.0 Digital Beamforming (DBF) Radar and Maximum Likelihood
Estimation (MLE)
A ground based DBF radar transmits a radio frequency carrier signal out to an aircraft target which is located at angle
from a linear array of transmit/receive elements. The signal echoes from the target and returns to the radar. An array digital beamformer (DBF) forms N b
simultaneous receive beams from the noise corrupted signal echo. The N b resulting signal plus noise in-phase (I) and quadrature (Q) samples are to be processed in such a way as to produce a maximum likelihood estimate of the target location angle. In the limiting case, the beams may be the elements themselves, leading to the full array
MLE. The radar processing situation is as shown in Figure DJM-15.
Figure DJM-15 Radar Array with Multibeam Receive Digital Beamforming (DBF)
Next consider the full array DBF MLE, as this should be the best accuracy one can obtain from the array at a fixed SNR.
18
3.1 Full Array DBF MLE Processing
At the receiver downconverter outputs, the signal plus noise samples may be represented as a complex (I+jQ) N x 1 vector as r
Ag
T
( T y
)
( T y
)
n , where A is an unknown complex amplitude, g
T
( T y
) is the transmit beam pattern, T y
=cos(
)=sin(
,
is the signal incidence angle relative to the array (y-)axis,
is the signal incidence angle relative to the array broadside normal,
( T y
) | n
exp( j 2
T y y n
/
0
)
( T y
) is an Nx1 complex cissoidal vector with nth component
, y n
is the nth array element location,
is the
transmit/receive carrier signal wavelength, and n is an Nx1 complex vector of
independent random noise samples. Note that getting an MLE of T y
is equivalent to getting one of
because is a monotonic function of
on the front side of the array, where it is responsive to incident signals
The receiver noise samples may be well-modeled as independent complex zero mean
Gaussian random variables. This makes the joint probability density function (PDF) of the N elemental complex output samples p ( r
)
( 2
2 n
)
N b exp(
|| r
Ag
T
( T y
)
( T y
) ||
2
/ 2
n
2
) , of
|| r
Ag
T
( T y
)
( T y
) ||
2
( r
Ag
T
( T y
)
( T y
) )
( r
y
Ag
T
is equivalent to minimization
( T y
)
( T y
))
The complex amplitude scalar A is a nuisance parameter which is unknown and hence also must be estimated. This is done by setting the gradient of
with respect to A
*
to zero and solving for A
or
A
*
0
( T y g
)
*
T r
( T
/( y g
)
T
(
T y
)
*
( T y
.
)(
||
r
( T y
Ag
T
) ||
2
)
( T y
)
( T y
))
. Note that ||
( T y
) ||
2
N , so
( T y
) r
/( Ng
T
( T y
))
1
||
( I
|| r
where
P (
[(
T
P ( T y y
)
( T
)) r
y
)
||
2
r
/
( T y
N
)
]
(
( T
T y
) y
/
) ||
N
2
gives is an N x N projection matrix. Let
u ( T y
)
( T y
) / N
Then
1
|| ( I
u ( T y
)
u
( T y
))
r ||
2
|| r
u ( T y
) u
( T y
) r ||
2
||
r
This quantity may be minimized by maximizing
||
2
2
|
u
( T y
| u
( T y
) r
)
|
2 r
||
|
2
.
r ||
2
( 1
|
u
( T y
) r |
2
/ ||
r ||
2
)
This is one form of the Full Array MLE Estimator equation, referred to herein as the
"canonical" form.
19
A 3D graphical visualization of this N dimensional situation is depicted in Figure DJM-
16.
.
.
r
, ,
Figure DJM-16 3D Graphical Visualization of N Dimensional Optimization
The measured data vector u r
is a point on a 2N ( N complex) dimensional unit hypersphere. The unit vector u(T projected into an N y
) is a trajectory on the surface of the hypersphere dimensional (complex) subspace. The quantity u
( T y
) u r
is the cosine of the angle between the two unit length vectors. This cosine is maximized when the two vectors are closest together in angle. The value(s) of T y
at which that happens is the desired MLE of T y
. If the measured data point happens to lie on the beam trajectory, then the two vectors align perfectly at that point, the value of
2
becomes unity, and the corresponding value of T y
is the MLE of T y
.
The processing corresponding to this canonical form of the Full Array MLE is shown in
Figure DJM-17.
20
Figure DJM-17 Digital Processing for the Full Array Canonical MLE Form
The processing consists of searching T
2
| u
( T y
) r
|
2 y
values for the one which maximizes
. The complex received data vector r
consists of a fixed set of elemental samples of the target echo plus received noise. The MLE DBF processor then steers a uniformly illuminated sum receive beam around in space in the vicinity of the transmit beam direction until a maximum is found. No additional transmissions are required in this process. The search may be done by any number of techniques, including systematic, random, gradient, Newton-Raphson, or other.
The search technique selected is an important implementation aspect of the radar design, and may have a substantial effect of the radar’s accuracy performance. However, to the extent that the search converges on the theoretical MLE estimate, the particular search technique is an implementation detail and is not addressed further in this paper.
21
Another form is found for the Full Array MLE as follows.
Note that
2
|
u
( T y
) r
|
2
u
( T y
) r
r
u ( T y
) .
Taking the derivative of this quantity with respect to T y
and setting it to zero gives
2
/
T y
0
u
( T y
) r
r
u
( T y
)
u
( T y
) r
r
u
( T y
) or
Re{ u
( T y
) r
r
u
( T y
)}
0
Recall that
Re{
( T y
u ( T y
)
) r
r
( T y
)}
( T y
0
) / N , so the above requirement may also be expressed as
, or alternatively as Re{
( T y
) r
r
( T y
)} /(||
( T y
) || N )
0
The quantity r
U
( T y
)
( T y
) r
/ N
n
N
1 r n exp(
j 2
T y y n
/
0
) / N ) is the complex scalar output of a uniformly illuminated (real) sum beam steered to direction T y
. The quantity r
L
( T y
)
( T y
) r
/ ||
( T y
) ||
j n
N
1 r n y n exp(
j 2
T y y n
/
0
) / ||
y || is the complex scalar output of a linear odd illuminated (real) delta beam steered to direction T y
. Hence the above zero requirement may be written as
Re{ r
L
( T y
) r
*
U
( T y
)}
0 .
Providing solutions are excluded where | r
U
( T y
) |
0 , the above equation may be divided through by | r
U
( T y
) | 2 giving Re{ r
L
( T y
) / r
U
( T y
)}
0 . This form of the full array MLE is herein referred to as the Full Array Delta/Sum Null Seeking MLE.
The DBF signal processing for the Full Array Delta/Sum Null Seeking MLE is shown in
Figure DJM-18.
22
Figure DJM-18 Digital Processing for the Full Array Delta/Sum Null Seeking MLE Form
The processing consists of searching T y
values for the one which zeros
2
Re{ r
L
( T y
) / r
U
( T y
)} . The search may be done by any number of techniques, including systematic, random, gradient, Newton-Raphson, or other.
Even though this form of the estimator equation appears similar to conventional monopulse, it is quite different. In conventional monopulse, the sum and delta beams are fixed in direction ( in the same direction as the transmit beam), while the target direction estimate is extracted. In the above MLE, the uniform sum and linear odd delta beams are steered around in space as the T y
values are searched (around the direction of the transmit beam), seeking a null in the above Full Array MLE Delta/Sum equation.
The direction accuracy performance of the full array MLE is next presented.
23
3.1.1 Full Array MLE Accuracy Performance
Recall again that r
Ag
T
( T yT
)
( T yT
)
n , where T yT
is the actual target direction. Thus, the output of the linear odd delta beam channel in the Full Array MLE processor is r
L
( T
Ag y
T where
)
( T
yT
L
(
)
T
(
T yT
L y
(
)
T r
T yT y
/
)
||
( T y
) ||
Ag
T
T y
)
( T y n
L
)
( T y
( T yT
)
)
(
/
T
|| yT
)
(
T
( y
T
) y
||
)
( j
T
y yT
T
) / ||
( T yT
( T
T y y
)
) /
||
||
y
||
( T y
)
n
and
/ ||
( T y
) || n
L
( T y
)
( T y
) n / ||
( T y
) || .
Also, the output of the uniform sum beam channel in the Full Array MLE processor is r
U
( T y
)
( T y
) r
/ N
Ag
T
( T yT
)
( T y
)
( T yT
) / N
( T y
)
n / N
Ag
T
( T yT
)
U
( T yT
T y
)
n
U
( T y
) where n
U
( T y
)
U
( T y
( T y
T yT
) n /
)
N
( T y
)
( T yT
) /
.
N
Nsnic
N
(( T yT
T y
) d y
/
0
) and
Note incidenally that the noise free MLE solves the equation
0
j y
T
L
( T y
( T y
T yT
T yT
)
)
/
U
/(||
y
( T y
||
T yT
N
) snic
N
N
(( T y
( T y
T yT
)
)
d
( T yT
/
0
) /(||
( T y
) ||
( T y
)
( T yT
)) or, since the above function is odd about T y
-T yT
; the MLE becomes T
ˆ yT
T yT
.
The statistics of the complex Gaussian random processes are independent, zero mean and stationary, i.e., E { n
L
( T y
)}
( T y
) E {
n } / ||
( T y
) ||
0
E { n
U
( T y
)}
( T y
) E {
n } / N and
E {|
E {| n
L n
U
E { n
L
( T y
( T y
( T y
)
)
) n
*
|
2
|
2
U
}
}
( T y
( T y
( T y
)}
)
)
E
(
{
n
n
}
E
{ n
n
}
T y
) E {
( T y
n
( T y
n
}
)
)
/
/
||
N
( T y
)
(
T
/(||
2 y
)
||
2 n
2
( T y
||
2
( T y
2 n
) ||
) ||
2
N )
/
N
0
2
n
2
Substituting these results into the full array delta/sum null seeking MLE equation yields
Re{( Ag
T
L
( T yT
T y
)
n
L
( T y
)) /( Ag
T
U
( T yT
T y
)
n
U
( T y
))}
0 or
Re{(
L
( T yT
T y
) /
U
( T yT
T y
)
n
L
( T y
) / Ag
T
U
( T yT
T y
)) /( 1
n
U
( T y
) / Ag
T
U
( T yT
T y
))}
0
Define
f ( T y
)
L
( T y
)
L
( T y
) / n
L
( T y
) /
U
( T y
)
Ag
T
U
( T yT
, so Re{( f
T y
))
( T yT
,
U
T y
)
( T y
)
n
U
( T y
)
L
( T y
)) /( 1
/
U
Ag
T
U
( T y
))}
( T y
T yT
0
)) , and
24
In the high SNR case, to a good approximation;
Re{ f ( T yT
T y
)
L
( T y
)
f ( T yT
T y
)
U
( T y
)}
x
L
( T y
) f ( T yT
Re{
T y
)
L
( T y x
L
( T y
)
)}
and f x
U
( T y
)
( T yT
T y
) x
U
Re{
U
( T y
)
( T y
0
0
)}
, or with
The value of T y
which solves the above equation is the MLE of the target direction. It is reasonable to suppose that this estimate deviates from the actual target direction by a small amount, i.e., that T
ˆ y
T yT
Ty
. Then f (
Ty
)
x
L
( T yT
Ty
)
f (
Ty
) x
U
( T yT
Ty
)
0
Expanding terms in a single term Taylor series expansion gives f ( 0 )
f
( 0 )
Ty
x
L
( T yT
)
x
L
( T yT
)
Ty
( f ( 0 )
f
( 0 )
Ty
)( x
U
( T yT
)
Neglecting product error terms, and product of error and noise terms, f ( 0 )
f
( 0 )
Ty
x
L
( T yT
)
f ( 0 ) x
U
( T yT
)
0
U
( T yT
)
Ty
)
0
Solving for the error gives
Ty
( f ( 0 )
x
L
( T yT
)
f ( 0 ) x
U
( T yT
)) / f
( 0 )
Recall from above that if the array elements are symmetric about y=0, then f(0)=0 and
Ty
x
L
( T yT
) / f
( 0 )
This last equation shows that the full array MLE of direction is unbiased, i.e.,
E {
Ty
}
E { x
L
( T yT
)} / f
( 0 )
0
The variance of the MLE, also the MSE, is
2
T
ˆ y
var{
Ty
}
var{ x
L
( T yT
)} / f
2
( 0 )
var{Re{
L
( T yT
)}} /
var{Re{ n
L
( T yT
)}} / | A |
2
2
T
ˆ y
n
2
/(| A |
2 g
2
T
( T
Ng
T
2
( T yT
) f
2
( 0 )) yT
)
2
U
( 0 ) f
2
( 0 ) f
2
( 0 ) or
Recall f ( T y
)
L
( T y
) /
U
( T y
) , so f
( T y
)
L
( T y
) /
U
( T y
)
L
( T y
)
U
( T y
) /
2
U
( T y
) and f
( 0 )
L
( 0 ) /
U
( 0 )
L
( 0 )
U
( 0 ) /
2
U
( 0 )
Also recall that
L
( T yT
L
( T y
)
T y
)
( 0 )
( T y
) / ||
( 0 ) ||
( T y
)
( T yT
) /
n
N
1 jy n exp(
||
( T y
) || , so that j 2
y n
T y
/
0
) / ||
y ||
And therefore that
L
( T y
)
( 2
/
0
) n
N
1 y n
2 exp(
L
( 0 ) /
U
( 0 ) j 2
y n
T y
/
0
) / ||
y || and so
L
( 0 )
( 2
/
0
) ||
y || .
This makes the boresight sensitivity f
( 0 )
L
( 0 ) /
U
( 0 )
2
||
y || /(
0
N )
25
Thus the MLE MSE is
2
T
ˆ y
n
2
/(| A |
2 g
T
2
( T yT
)( 2
)
2
||
As before, let SNR
UT 0
| A |
2
Ng
T
2
( T yT
) / 2
n
2
and let
terms, the RMSE of the MLE is written as
T
ˆ y
1 /
2 SNR
UT 0
.
y ||
2
/
2
0
)
2
||
y || /
0
N . Then in these
Note that as defined above the sensitivity factor
in the full array MLE is not a function of the target direction.
The SNR in this expression is the expected SNR of the target echo in a uniformly illuminated sum receive beam steered to the target direction illuminated by a transmit beam steered to the search beam position. Note that it can be expressed as
SNR
UT 0
SNR
U 0 g
T
2
The various performance parameters of a full array DBF MLE system, including the
MLE accuracy (RMSE) is shown in Figures DJM-19 though 23 below for an example system with
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB. Note that the
MLE noise-free monopulse ratio and it’s derivative depends on both the estimated target direction (or candidate estimate target direction) and the actual target direction. The actual estimation performance, i.e., RMSE depends only on the actual target direction.
26
Figure DJM-19 Monopulse Ratio for DBF Full Array MLE Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Figure DJM-20 Derivative of Monopulse Ratio for DBF Full Array MLE Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
27
Figure DJM-21 Sensitivity for DBF Full Array MLE Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Figure DJM-22 SNR for DBF Full Array MLE Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
28
Figure DJM-23 Accuracy (RMSE) for Full Array MLE Example
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
It is shown in Appendix I that the Full Array MLE target direction accuracy (RMSE) shown above in Figure DJM-23 achieves the Cramer-Rao Lower bound. Thus, the Full
Array MLE provides the best possible accuracy obtainable, at any target direction, from the full N=42 element L-Band array given a 20dB boresight SNR. The accuracy on a boresight target for this array example is 1.86 msines. At |T y
|=0.03, the accuracy is 4.0 msines.
29
3.1.2 Effect of Transmit Beam Spoiling on Full Array MLE Performance
The effect of transmit beam broadening/spoiling on the performance of Full Array MLE is shown in Figure DJM-24 below.
Figure DJM-24 Effect of Transmit Beam Spoiling on Full Array MLE Accuracy
(RMSE)
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Broadening the transmit beam reduces the SNR at all directions out to |T y
|=0.023 and increases the SNR for all directions outside this regime. This completely accounts for the crossover in accuracies between the two cases of transmit beam.
30
A direct comparison between the DBF Full Array MLE and the Conventional Uniform
Sum, Linear Odd Delta Monopulse performance is presented in Figure DJM-25 to follow.
Figure DJM-25 Accuracy (RMSE) Comparison for DBF Full Array MLE vs
Conventional Monopulse
0
=0.2308 (L-Band), d=0.5
0
, N=42, and SNRTU0=20dB
Note that for a target at boresight, there is no difference in the performance of the two systems. In other words, the conventional (uniform sum, linear odd delta) monopulse is equivalent to full array MLE for a target at boresight. However, for an off-boresight target, the full array DBF MLE shows a considerable advantage in accuracy performance over the conventional uniform sum-linear odd delta monopulse system. For example, for a target +-0.03 sines off-boresight, the full array DBF MLE is 33% better in accuracy (4 msines vs 6 msines). This can also result in a substantial search advantage when beam packing is considered.
Next, the technique of multiple receive beam DBF MLE is examined, along with it’s performance. In this technique, a fixed set (cluster) of multiple receive beams are first formed from the array. It is properly viewed as a constrained MLE technique. It should not be expected to achieve the accuracy performance of the full array MLE.
31
3.2 Multiple Beam DBF MLE Processing
The cost of a DBF radar may be reduced by reducing the number of required receiver downconverter channels. This may be accomplished by a combination of subarraying and/or beamforming on the receive array at RF prior to downconversion and A/D conversion. A cost-effective approach to target direction finding then becomes to preform a small cluster of beams around the direction of the transmit beam and then apply maximum likelihood estimation (MLE) to the beam cluster digital output samples. This approach is called Multiple Beam DBF MLE processing.
At the receiver downconverter outputs, the signal plus noise samples may be represented as a complex (I+jQ) N x 1 vector as complex amplitude, g
T array element location,
( T y
) r
Ag
T
( is the transmit beam pattern, T y
=cos(
), complex cissoidal vector with nth component
T
( y
)
( T y
)
n , where A is an unknown j 2
( T y
) is an Nx1
0
T y
) | n
exp( T y y n
/
0
) , y n
is the nth
is the transmit/receive carrier signal wavelength, and n is an
Nx1 complex vector of independent random noise samples. be compactly modeled as a complex matrix operation on the received data vector, r
r b
w
T b r
, where w b
is an N x N b
, as
matrix of complex weights. The superscript T denotes terms of its columns as, w b
w b 1
w b 2
...
w bN b
b
may be written in
. Thus, the mth beam output is r bm
w bm
T r
n
N
1 w bnm r n
. The receive beam weight w bnm
generally consists of a steering phase and an amplitude weight.,i.e., w bnm
bnm exp(
j 2
T y 0 m y n
/
0
) .
Typically, but not always, the amplitude weights are the same for all the receive beams, i.e.,
bnm
=
bn
so in those cases w bnm
bn exp(
j 2
T y 0 m y n
/
0
) . Also, without loss of generality, the weights of each beam may be normalized for unity noise gain, i.e.,
N n
1
|
bnm
| 2 n
N
1
| w bnm
| 2
1 .
The beam output data is given by
r b
r r b 1 r b
...
2 bN b
w
T b r
w
w
w
T
T b 1
T b
...
2 bN b
r
w w w
b
T
T b 1
T
...
2 bN b
r r
r
w
T
(
b 1 w
T b 2
Ag
T
( Ag
T
(
T y
T
n
n
)
)
w
T bN b
...
( Ag
T
T
n )
Ag
T
w
T
w
T b b 1
2
( T
( T y y
w
T bN b
...
( T y
)
)
)
w w
T b 1
T b 2
w
T
...
bN b
n
n
n
Let g bk
( T y
)
w
T bk
( T y
)
N n
1 w bnk exp( j 2
T y y n so
/
0
)
n
N
1
bnk exp( j 2
( T y
T y 0 k
) y n
/
0
) ,
32
r b
Ag
Ag
T
T
( T y
( T y
)
)
g b
g
( T g g y
1
2
N b
)
( T y
( T y
...
(
T y
)
)
n b
)
n b
The receiver noise samples at the beam outputs may be well-modeled as (possibly correlated) complex zero mean Gaussian random variables. If the noise samples at the beam outputs have an invertible covariance matrix, the joint PDF of the beam output samples may be written as p
( r b
)
N b det
1
( M nb
) exp(
(
r b
Ag
T
( T y
)
g b
( T y
) )
M
1 nb
( r b
Ag
T
( T y
)
g b
( T y
))) , where M nb
is the covariance matrix of the beam output noise samples.
M nb
E {
n b
n b
}
E { w
T b
n
n
w b
*
}
2
2 n w
T b w b
*
2
2 n
nb
, where
nb
w T b w * b
.
If the beam weights are mutually orthonormal, i.e.,
nb
w
T b w b
*
w
T b 1
w
T b 2
...
w
T bN b
w
* b 1
w b
*
2
...
w
* bN b
1
0
...
0
0
1
...
0
w
bk
w bp
...
...
...
...
0
1
0
...
k
p
I
N b
, then
N b
x N b
identity matrix
In this case, the beams are said to be independent, in the sense that their noise outputs are independent random processes.
In general, however, the beam weights are not mutually orthonormal, and the beams are not therefore independent. In this case their noise outputs are correlated and p ( r
b
)
( 2
2 n
)
N b det
1
(
nb
) exp(
( r
b
Ag
T
( T y
)
g b
( T y
) )
( 2
2 n
nb
)
1
( r
b
Ag
T
( T y
)
g b
( T y
)))
For the maximum likelihood estimate based on this data, the target direction T y
is to be found to maximize this joint PDF. This is equivalent to minimizing
( r
b
Ag
T
( T y
)
g b
( T y
) )
1 nb
( r
b
Ag
T
( T y
)
g b
( T y
)))
.
The complex amplitude scalar A is a nuisance parameter which is unknown and hence also must be estimated here. This is done first by setting the gradient with respect to A
*
to zero and solving for A.
A
*
0
g
T
g b
1 nb
( r b
Ag
T
g b
) or A
(
g b
1 nb
r b
) /( g
T
||
g b
||
2
)
.
Substituting this estimate of A back into
gives
33
r b
r b
r b
1 nb
1 nb
r b
1
r b
nb r b
|
( r b
g
b
((
g
b
1 nb
1 nb
g
b r b
1
r b nb
g b
|
2
/
)
||
1 r nb
g b
/(||
)
g
/ b
||
2 b
||
||
g
2 b
))
g
||
2
b
1 nb
r b
The first term in this expression is not a function of T y
, and so the expression may be minimized by maximizing
2
|
g
b
1 nb
r b
|
2
/ ||
g b
||
2
.
Let
u b
g b maximizes
/ ||
2
g b
|
||
u b
be a normalized version of the beam vector, so the MLE of T y
1 nb
r b
|
2
. In this paper, this is referred to as the canonical form of the multiple beam MLE (for correlated beams).
Note that if the beam noise outputs are uncorrelated, the beams are said to be independent and
nb
I . In this case, the multiple beam MLE maximizes
2
| u
b
r b
|
2
.
A 3D graphical visualization of this 2N b
complex dimensional situation is depicted in
Figure DJM-26. The corresponding DBF MLE processing for the independent beams is shown in Figure 27a.
Figure DJM-26 A 3D Graphical Representation of Multiple Beam MLE Geometry
The measured data vector u rb
is a point on a 2N b
( N b
complex) dimensional unit hypersphere. The vector u b
(T y
) is a trajectory on the surface of the hypersphere projected
34
into an N b dimensional (real) subspace. The quantity
u b
( T y
)
u rb
is the cosine of the angle between the two unit length vectors. This cosine is maximized when the two vectors are closest together in angle. The value(s) of T y
at which that happens is the desired MLE of
T y
. If the measured data point happens to lie on the beam trajectory, then the two vectors align perfectly at that point, the value of
2
becomes unity, and the corresponding value of T y
is the MLE of T y
.
Figure DJM-27a Multiple Beam DBF MLE Processing Canonical Forms—
Independent Beams
For the more general correlated beams case, There are several ways to process for the
MLE, depending on how the terms within the magnitude are organized.
1) Let r
b
1 nb r
b
, so multiple beams,
r b
2
u b
r
| b
|
2
. In this case the received data at the output of the
, is first pre-processed with the inverse covariance matrix digital beamformer. Note that this leaves the noise at the modified beams output correlated, but instead with the inverse of the original covariance matrix. Then the normalized original beam vector
u
* b
( T y
)
g
* b
( T y
) / ||
g b
( T y
) || is used on the modified data to form a single beam output. The MLE is found as the largest magnitude of this beam output as the value of T y
is searched. This variant of the canonical multiple beam MLE for correlated beams is illustrated in Figure DJM-
27b.
35
Figure DJM-27b Digital Processing for the Canonical Multi-Beam MLE Form-
Correlated Beams Variant 1
2) Let v
b
( T y
)
1 nb
u b
( T y
)
1 nb
g b modified beamforming vector,
v
( T y
* b
)
( T y
/ ||
g b
( T y
) || , so
2
|
v
b
r b
|
2
. In this case the
) , is used on the original beam output data to form a single beam output. The MLE is found as the largest magnitude of this beam output as the value of T y
is searched. This variant of the canonical multiple beam MLE is illustrated in Figure DJM-27c.
Figure DJM-27c Digital Processing for the Canonical Multi-Beam MLE Form-
Correlated Beams Variant 2
36
3) Let
2
r b
r
b
h
|
v
b
h
1 / r
b
h nb
|
2
2
r b
, and
v b
h
( T y
)
1 / nb
2
u b
( T y
)
1 / nb
2
g b
( T y
) / ||
g b
( T y
) || so
. In this case the received data at the output of the multiple beams,
, is first pre-processed with the square root of the inverse covariance matrix
DBF. The resultant noise at the output of this pre-processor beamformer is then beam-to-beam uncorrelated, or “white”. Then the normalized beam vector
v
* b
h
( T y
) is used on the modified data to form a single beam output. The MLE is found as the largest magnitude of this beam output as the value of T y
is searched.
This variant of the canonical multiple beam MLE is illustrated in Figure DJM-
27d.
Figure DJM-27d Digital Processing for the Canonical Multi-Beam MLE Form-
Correlated Beams Variant 3
Yet a fourth variant of the canonical form of the Multiple Correlated Beam MLE may be expressed in terms of the eigenvalues and eigenvectors of the beam output noise covariance matrix.
The noise covariance matrix M nb
may be written in terms of its eigenvalues and eigenvectors as
nb
M nb
/ 2
n
2 w
T b w b
*
E
E
, where E is an N b
x N b
matrix whose columns are the eigenvectors of the N b
x N b
normalized Hermitian covariance matrix
nb and
is an N
1 nb
M
1 nb
/ b
2
x N b
diagonal matrix of real non-negative eigenvalues. Its inverse is then
2 n
( w
T b w b
*
)
1
( E
E
)
1
E
1
E
E
1 / 2
1 / 2
E
Then the MLE minimizes
2
|
u b
1 nb
r b
|
2
|
u b
( E
1 / 2
1 / 2
E
)
r b
|
2
or
2
|
u
bE
( T y
)
r bE
|
2
,
37
where
r bE
1 / 2
E
r b
and u
bE
1 / 2
E
u b
“whitens” the noise at it’s output.
. Note that this pre-processing beamformer also
Define a modified set of N b
weights represented by the N x N b
weighting matrix w bE
w b
E
g bE
w
T bE
*
1 / 2
, and let
r bE
w
T bE r
be a modified beam output data set, and let be a modified set of N b
beams formed from the modified weights. The modified weights could be formed by first forming the original beams and then modifying them by E
* -1/2
, or they could be formed directly from the elements using w bE
. In either case, the resulting noise outputs from the modified beams are uncorrelated
(and equal variance), and hence the modified beams are independent.
The multiple beam MLE is found by maximizing
2
|
u
bE
( T y
) r bE
|
2
. This is the fourth variant of the canonical form of the multiple correlated beam MLE equation. The processing consists of searching T y
values for the one which maximizes
2
|
u
bE
( T y
) r
bE
|
2
. The search may be done by any number of techniques, including systematic, random, gradient, Newton-Raphson, or other.
Again, this result reduces to maximizing
2
|
u b
( T y
) r b
|
2
when the original beams are independent, as do all of the correlated beam variants of the canonical form.
The processing corresponding to this fourth variant of the canonical form of the Multi-
Beam MLE is shown in Figure DJM-27e.
Figure DJM-27e Digital Processing for the Canonical Multi-Beam MLE Form-
Correlated Beams Variant 4
38
Another completely different set of forms are found for the Multiple Beam MLE as follows. Note that (for independent beams)
2
|
u b
( T y
) r
b
|
2
u b
( T y
) r b r
b u b
( T y
) .
Taking the derivative of this quantity with respect to T y
and setting it to zero gives
2
/
T y
0
u
b
( T y
) r
b r
b
u
b
( T y
)
u
b
( T y
) r
b r
b
u
b
( T y
) or Re{ u
b
( T y
) r
b r
b
u
b
( T y
)}
0
Providing no solutions are sought for equivalently expressed as Re{ u
b
( T y
) r b r
b
u b
/
u b
( T y
)
( T y
)
r b
}
0 , the above MLE form may also be
0 .
Note that u
b
( T y
)
r b
n
N b
1
* u bn
( T y
) r bn is a weighted sum of the DBF beam output samples. For values of T y
near the actual target direction, the real part of this function tends to be near a maximum and is not near zero. In this respect it acts as a composite "sum" beam near the actual target direction. Also note that u
b
( T y
)
r b
n
N b
1
* u bn
( T y
) r bn is a weighted sum of the DBF beam output samples. However, this function is near zero, and changes from positive to negative or vice versa, in the neighborhood of the target direction. In this respect it acts as a composite "delta" beam near the target direction. For this reason, the
MLE is herein referred to as the Normalized Delta/Sum Null Seeking MLE.
Let r b
( T y
)
u
b
( T y
)
r b
/ || u
b
( T y
) ||
u b
( T y
)
r b
and r b
( T y
)
u
b
( T y
) r
b
/ || u
b
( T y
) ||
The Multi-Beam Delta/Sum Null Seeking MLE then takes the familiar monopulse looking form Re{ r b
( T y
) / r b
( T y
)}
0
The digital signal processing corresponding to this Multi-beam Delta/Sum Null Seeking form of the MLE is shown in Figure DJM-28.
39
Figure DJM-28 Digital Signal Processing for the Multi-Beam Delta/Sum Null
Seeking MLE Form
The processing consists of searching T y
values for the one which zeros
Re{ r b
( T y
) / r b
( T y
)} . The search may be done by any number of techniques, including systematic, random, gradient, Newton-Raphson, or other. If multiple zeros are found, these must be reduced to those absolutely maximizing
2
| u
b
T
( T y
) r
b
|
2
.
Even though this form of the estimator equation appears similar to conventional monopulse, it is quite different. In conventional monopulse, the sum and delta beams are fixed in direction ( in the same direction as the transmit beam), while the target direction estimate is extracted. In the above Multi-Beam MLE, the composite sum and delta beams are being moved around in space as the T y
values are searched (around the direction of the transmit beam), seeking a null in the Multi-Beam MLE Delta/Sum output. No additional transmissions are made, and the search may be done at a very high sample rate as no additional dwells are required.
Formed by weighting and combining the multiple fixed receive beams, the composite sum and delta beams in the Multi-Beam MLE are sub-optimal in overall accuracy
40
performance compared to the uniform sum, linear odd delta beams in the Full Array
MLE.
The beam unit vector in this case is given by:
u b
u b
( T y
)
g b
( T y
) / ||
g b
( T y
) ||
g b
/ ||
g b
||
The derivative of this unit vector with respect to direction Ty is u
b
u
b
( T y
)
b
/ ||
g b
||
g b
g
b
b
/ ||
g b
||
3
( I
P b
) g
b where Q b
I
Q b g
b
P b
, P b
g b
g
b
/ ||
g b
||
2 are sub-space projection matrices.
This results in || recognizing that
b
||
2
P b
b
Q
b
Q b
b
P b
and that
b
( I
P b
P b
P b
P b
)
( I
;
||
P b
)
b
b
||
2
b
b
( I
( I
P b
P b
)
b
P b
P b
P b
)
b
Q b
b
b
. Now
Then the composite sum and delta beams of the Null Seeking form of the MLE are: r b
u b
r b
/ ||
u b
||
u b
r b
g
b
r b
/ ||
g
b
|| and r b
If the vector operators on the beam data vector
b r b
r b
/ ||
b
||
b
Q b r
b
/( b
Q b
b
)
1 / 2
.
are viewed as candidate direction dependent weighting vectors, then the Null-Seeking Delta/Sum form of the MLE becomes :
Re{
T
r b
/
*
*
( T y
)
T
r b
}
g b
/
0
||
, where
g b
|| .
*
*
( T y
)
Q b g b
/( g
b
Q b g
b
)
1 / 2
and
The value of T y
that solves this equation ( and absolutely maximizes
2
|
u b
T
( T y
)
r b
|
2
) is the MLE.
The Multi-Beam Delta/Sum Null Seeking MLE Form may also be developed for correlated beams using each of the four canonical form variants discussed previously.
The accuracy performance of the Multiple Beam MLE is next developed and presented.
41
3.2.1 Multiple Independent Receive Sum Beam MLE Performance
Recall that the N direction T yT
is
b r b
x 1 complex received data vector corresponding to a target with actual
Ag
T
( T yT
) g bT
n b
.
Substituting this result into the Null Seeking Delta/Sum Multibeam MLE gives
0
Re{
Re{(
Ag
T
T r
b
/
T
g
T
bT r
b
}
T
Re{
n b
)
/(
T
(
Ag
Ag
T
T
T
( T yT
g bT
)
g bT
T
n b
n b
)}
) /
T
( Ag
T
( T yT
)
g bT
n b
)}
Re{( f
b
) /( 1
b
)}
f
x b
fx b
where x b
f
Re{
b
f ( T y
, T yT
)
} ,
b
[
T b
Q b
g bT n b
/ Ag
T
T
/(
g bT g
b
,
Q b
b
g
b
)
1 / 2 n b
]
/[
/
g
T b
Ag
g
T bT
T
/
g
||
g b bT
,
||] n b
,
x b
T
n b
Re{
b
, and
} n b
,
T
n b
.
Expanding f in Taylor Series about T yT
and neglecting higher order terms gives
0
f
T
f
T
T
ˆ y
x b
( f
T
f
T
T
ˆ y
) x b
, where f
T
f ( T yT
, T yT
) and f
T
(
f /
T y
) |
T y
T yT
.
Neglecting small product of error-noise terms and recognizing that f
T
=0 because
Q bT
g bT
( I
P bT
)
g bT
g bT
P bT
g bT
g bT
g bT
g
bT
g bT
/ ||
g bT
||
2
g bT
g bT
0 ,
The MLE Estimation error becomes
T
ˆ y
x b
/ f
T
This error is unbiased and has a variance (MSE) of
2
T
ˆ y
2 n
/(| A |
2 g
2
T
|
T
T
g bT
|
2 f
T
2
)
2 n
/(| A |
2 g
2
T
||
g bT
||
2 f
T
2
)
Then the RMSE can be written as
T
ˆ y
1 /(
T
2 SNR
UT 0
) where SNR
UT 0
| A |
2 g
T
2
N / 2
n
2
and
T
| f
T
|||
g bT
|| / N .
This is in the same form as the full array MLE but it exhibits a different sensitivity, and hence RMSE accuracy. Note that in the multi-beam MLE case here, the sensitivity is a function of the target direction relative to the transmit beam boresight.
The SNR in this expression is the expected SNR of the target echo in a transmit beam steered to the search beam position with a uniformly illuminated sum receive beam steered to the target direction . Note that it can be expressed as SNR
UT 0
SNR
U 0 g
T
2
This result is applicable as shown to any Multiple Beam MLE as long as the multiple beams are mutually orthonormal. It is also applicable to correlated beams as long as the pre-processed modified beams are used in the performance evaluation. The author has written a Matlab program MLEACCMB.m which evaluates the above RMSE versus target direction for a given line array, wavelength, SNR
UT0
, and beam set.
42
There are many cases to consider for the Multiple Independent Receive Beam DBF MLE technique performance:
Case 1a Two Receive Sum Beams + Unspoiled Transmit Beam
Case 1b Two Receive Sum Beams + Spoiled Transmit Beam
Case 2a Three Receive Sum Beams + Unspoiled Transmit Beam
Case 2b Three Receive Sum Beams + Spoiled Transmit Beam
……
In general there may be N b
orthogonal Receive Sum Beams with either unspoiled or unspoiled transmit beams
43
The above are cases where the receive beams are uniformly weighted sum (snic
N
) beams properly spaced peak-to-null for othogonality.
In addition, there are other special cases of multiple independent receive beams. For example there may be multiple monopulse beam pairs, spaced so as to be mutually independent. Another special case is where the beams are actually non-contiguous subarray outputs, where each subarray beam is steered to multiple directions.
In the cases of multiple independent uniformly illuminated sum beams spaced peak-tonull, the beam patterns are given by g k
( T y
)
w
T k
( T y
)
w nk exp( j 2
T y n
N
1 y n
/
0
)
n
N
1
nk exp( j 2
( T y
T y 0 k
) y n
/
0
)
n
N
1 exp( j 2
( T y
T y 0 k
) y n
/
0
) / N
N snic
N
(( T y
T y 0 k
) d y
/
0
)
3.2.1.1 Two Independent Uniform Sum Beam MLE Performance
For example, consider the two independent sum beam situation, viz., N b
=2. In this case u
( T y
)
u
1 u
2
( T y
( T y
)
)
snic snic
N
N
(( T y
(( T y
T y 01
T y 02
) d
) d
/
/
0
0
)
/( snic
2
N
(( T y
T y 01
) d /
0
)
snic
2
N
(( T y
T y 02
) d /
0
))
1 / 2
These 2 snic beam, the corresponding unit vector trajectory, and the associated derivatives are shown in Figures DJM-29 for the example case of N=42, d/
0
=0.5,
Ty01=-
0
/2L, and Ty02=
0
/2L.
44
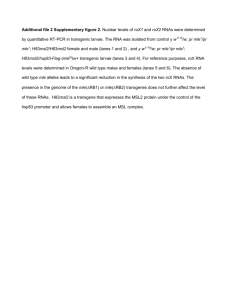
Figure 29 Case 1a: Two Independent Uniform Sum Beams with Uniform Transmit Beam
The MLE Delta/Sum Ratios as a function of candidate and actual direction are shown in
Figure DJM-30 below.
Figure 30 Case 1a: Two Sum Beam MLE Monopulse Ratios
45
Figure 31 Case 1a: Two Sum Beam MLE Sensitivity Factor
The MLE Sensitivity factor for the Two Sum Beam MLE Case 1a is shown in Figure
DJM-31 above.
Figure DJM-32 MLE SNR for Case 1a: Two Uniform Receive Sum Beams w Uniform
Transmit Beam
46
Figure DJM-33 MLE Accuracy for Case 1a: Two Uniform Receive Sum Beams w Uniform
Transmit Beam
A comparison of the accuracy performance of the Case 1a Two Uniform Sum Beam MLE to Full
Array MLE and Conventional Linear Odd Delta/Uniform Sum Monopulse is shown below in
Figure DJM-34.
47
Figure DJM-34 Comparison of the Accuracy Performance of the Case 1a Two
Uniform Sum Beam MLE vs Full Array MLE vs Conventional Linear Odd
Delta/Uniform Sum Monopulse—Uniform Transmit Beam
As expected, Full Array MLE accuracy (RMSE) performance is uniformly better than both the Case 1a Two Sum Beam MLE and the Conventional Linear Odd Delta/Uniform
Sum Monopulse. What might be mildy surprising to some, however, is that the accuracy performance of the Conventional Linear Odd Delta/Uniform Sum Monopulse is uniformly better than that of Case 1a Two Uniform Sum Beam MLE. What must be kept in mind is the the Multi-Beam MLE is a constrained MLE. The two sum beams are formed a priori ahead of the maximum likelihood processing. The Multi-Beam MLE processing gives the best possible estimate of target direction given the available two beam data. There are no guarantees that the accuracy performance of the constrained
MLE will be superior to another approach where the input data may contain better target direction information.
48
3.2.1.2 Two Sum Beam MLE Performance w 2:1 Spoiled Transmit Beam
Figure DJM-35 shows the same comparison only for the 2:1 spoiled transmit beam.
Figure DJM-35 Comparison of the Accuracy Performance of the Case 1b Two
Uniform Sum Beam MLE vs Full Array MLE vs Conventional Linear Odd
Delta/Uniform Sum Monopulse—2:1 Spoiled Transmit Beam
The effect of the 2:1 transmit beam spoiling is reduce the boresight SNR, and hence boresight accuracy in all three cases. However, accuracy is improved at off –boresight target directions in all three cases, due to the broader transmit beam. The relative accuracy performance of the three approaches remains the same.
Performance of the 3 Receive Sum Beam MLE Cases is next presented.
49
3.2.1.3 Three Uniform Sum Beam MLE Performance
Now consider the three independent sum beam situation, viz., N b
=3. In this case
u ( T y
)
u
1
( T y
)
u
2 u
3
( T y
( T y
)
)
snic
N
snic
N snic
N
((
((
T
(( T y
T y y
T y 01
) d
T y 02
) d
T y 03
) d /
/
/
0
0
0
)
)
)
/( snic 2
N
(( T y
T y 01
) d /
0
)
snic 2
N
(( T y
T y 02
) d /
0
)
snic 2
N
(( T y
T y 03
) d /
0
)) 1 / 2
These 3 snic beams, the corresponding unit vector trajectory, and the associated derivatives are shown in Figures DJM-36 for the example case of N=42, d/
0
=0.5,
Ty01=-
0
/L, Ty02=0, and Ty03=
0
/L.
Figure DJM-36 Case 2a: Three Recive Uniform Sum Beam MLE—Uniform
Transmit Beam
50
The MLE Delta/Sum Ratios as a function of candidate and actual direction are shown in
Figure DJM-37 below.
Figure 37 Case 2a: Three Sum BeamMLE Monopulse Ratios
The MLE Sensitivity factor for the Three Sum Beam MLE Case 2a is shown in Figure
DJM-38 below.
Figure 38 Case 2a: Three Sum Beam MLE Sensitivity Factor
51
Figure DJM-39 MLE SNR for Case 2a: Three Uniform Receive Sum Beams w Uniform
Transmit Beam
Figure DJM-40 MLE Accuracy for Case 2a: Three Uniform Receive Sum Beams w Uniform
Transmit Beam
52
Figure DJM-41 Comparison of the Accuracy Performance of the Case 2a Three
Uniform Sum Beam MLE vs Full Array MLE vs Conventional Linear Odd
Delta/Uniform Sum Monopulse vs Case 1a Two Uniform Sum Beam MLE—all w
Uniform Transmit Beam
The Case 2a Three Uniform Sum Beam MLE exhibits off-boresight accuracy that approaches that of the Full Array MLE. However, at boresight and for near boresight targets, the accuracy is degraded compared to the Full Array MLE, and to the two other cases.
53
3.2.2 Sum and Delta Beam Pairs MLE Performance
The multiple beams used for MLE need not be sum beams. The multiple beam processing
MLE algorithms presented in Section 3.2 are applicable to any number and type of receive beams. The performance analysis presented earlier in Section 3.2.1for independent beams is also applicable to any Multiple Correlated Beam MLE, provided the modified data and/or beams used in the variants are also used in the performance analysis.
In the cases under consideration in this section, the beam pairs used to develop the MLE are fixed sum and delta beam pairs, each steered in the same direction. Two questions addressed here are 1) Is the MLE processing with two (sum, delta) beam outputs identical to Conventional Monopulse? 2) If not, how does the MLE accuracy performance using these two beams compare to that of conventional monopulse, to that of the two sum beam MLE, and to that of the Full Array MLE ? Other cases involving more monopulse beam pairs is also addressed here.
This processing involves derivatives of the conventional sum and delta beams and is therefore not identically the same as conventional monopulse processing.
Now consider the accuracy performance of the multiple monopulse beam pair MLE. The accuracy performance of this special class of multiple beam MLE using delta, sum beam pairs is shown below for several cases. Note that if the number of monopulse beam pairs is N mpbp
then the number of beams is N b
=2N mpbp
.
Case 1a Two Independent Sum, Delta Receive Beams; Uniform Sum, Linear Odd Delta with Uniformly
Illuminated Transmit Beam ( N mpbp
=1, N b
=2)
Case 1b Two Independent Sum, Delta Receive Beams; Taylor Sum, Bayliss Delta with Uniformly
Illuminated Transmit Beam ( N mpbp
=1, N b
=2)
Case 2 Six Receive Sum, Delta Beams, Three Pairs of Uniform Sum, Linear Odd Deltas with Uniformly
Illuminated Transmit Beam ( N mpbp
=3, N b
=6)
In Case 2 the beams are not all independent. The sum beams are independent of each other and the delta beams are independent of their co-located sum beams. However, each of the delta beams is correlated with all the other beams except for it’s colocated sum beam. This requires that the beams be modified, either in the fixed DBF or in the DBF
MLE, to produce an equivalent 6 pre-processed modified beam set before the MLE is found. The accuracy performance of the 3 MP beam pair MLE is then identical to that of the 6 equivalent pre-processed beam MLE.
54
3.2.2.1 Two Independent Receive Beams MLE; Uniform Sum, Linear
Odd Delta with Uniformly Illuminated Transmit Beam ( N mpbp
=1, N b
=2)
55
Figure DJM-42 Accuracy Performance of a Two Beam MLE Using a Linear Odd
Delta beam and a Uniform Sum Beam
A direct comparison of the accuracy performance of this 2 beam MLE technique, using the outputs of a uniform sum and a linear odd delta beam, relative to that of a conventional monopulse system is displayed in the next figure.
56
Figure DJM-43 Comparison of the Accuracy Performance of the Linear Odd Delta,
Sum Two Beam MLE with that of Conventional Monopulse
The above figure shows that there is neglible difference in the accuracy performance of the 2-Beam MLE using DeltaL, SumU Beams vs Conventional Monopulse using
DeltaL/SumU.
57
3.2.2.2 Two Independent Receive Beams MLE; Taylor Sum, Bayliss
Delta with Uniformly Illuminated Transmit Beam ( N mpbp
=1, N b
=2)
58
Figure DJM-44 Accuracy Performance of a Two Beam MLE Using a Bayliss
Weighted Odd Delta beam and a Taylor Weighted Even Sum Beam
A direct comparison of the accuracy performance of this 2 beam MLE technique, using the outputs of a Taylor weighted sum and a Bayliss weighted delta beam, relative to that of a conventional monopulse system using the same beams, is displayed in the next figure.
59
Figure DJM-45 Comparison of the Accuracy Performance of the Bayliss Weighted
Odd Delta, Taylor Weighted Sum Two Beam MLE with that of Conventional
Monopulse
The above figure shows that there is neglible difference in the accuracy performance of the 2-Beam MLE using Taylor,Bayliss Monopulse Beams vs Conventional Monopulse using the same beams. One could thus conclude that convenventional monopulse using
Bayliss Delta/Taylor Sum beams is essentially equivalent to a 2-Beam MLE using the same beams.
60
3.2.2.3 Six Monopulse Receive Beams; Three Pairs of Uniform Sum,
Linear Odd Deltas with Uniformly Illuminated Transmit Beam (
N mpbp
=3, N b
=6)
61
Figure DJM-46 6 MP Beam MLE Accuracy Performance and Comparison to Full
Array MLE
It can be seen from the last frame of the above graphical set that the accuracy performance of the 6 beam (3 beam pair) monopulse MLE is virtually the same as that of the Full Array MLE.
3.2.3 Subarrayed DBF MLE Performance
The multiple beam MLE algorithm developed in Section 3.2 is applicable to subarrays as multiple beams. If the subarrays are non-overlapped, the subarray “beams” are independent. If they are overlapped, the subarray “beams” are not independent.
There is however, one subtle difference in subarray “beams” from a typical full array beam. A full array beam is generally a real function of T y
. The kth subarray is typically located somewhere other than at array center, and hence has a phase center which makes the subarray beam pattern complex, in fact mostly cissoidal. As long as the complex nature of the subarray “beams” is properly treated, the previous analysis holds.
3.2.3.1 Two Adjacent Non-Overlapping (Independent) Subarrays of 21
Elements Each
In this case two adjacent non-overlapped subarrays, each consisting of 21 elements, make up the 42 element linear array. The twenty-one elements in each subarray are, in this simplified case, steered to broadside and summed uniformly to form the two subarray
(beam) outputs. The subarray “beam” outputs are then processed to develop the MLE of target direction.
62
63
Figure DJM-47 Multibeam MLE Accuracy Performance—Two Adjacent Non-
Overlapping Subarrays of 21 Elements Each
From the above figures, as expected, the Multibeam MLE using two adjacent nonoverlapping subarrays as co-directed beams does not perform as well as the Full Array
MLE. There is a degradation in boresight accuracy, and a substantial off-boresight accuracy degradation.
3.2.3.2 Seven Adjacent, Non-Overlapping (Independent) Subarrays of 6
Elements Each
In this case seven adjacent non-overlapped subarrays, each consisting of 6 elements, make up the 42 element linear array. The six elements in each subarray are, in this simplified case, steered to broadside and summed uniformly to form the seven subarray
(beam) outputs. The subarray “beam” outputs are then processed to develop the MLE of target direction.
64
65
Figure DJM-48 Multibeam MLE—Seven Adjacent Non-Overlapping Subarrays of 6
Elements Each
It can be seen from the above figures that the Multibeam MLE using seven adjacent nonoverlapping subarrays as co-directed beams provides RMSE accuracy very nearly as good as the Full Array MLE.
3.2.3.3
Three Sum Beam DBF MLE from Seven Overlapped
Subarrays of 24 Elements Each
In this case the three sum beams are tightly packed but heavily weighted for sidelobe control. The noise outputs from these three beams are highly correlated, and so the beams are not independent in this sense. The Multibeam MLE then requires the initial step of beam filtering the three beam outputs to form three independent Eigen-based beam outputs. The performance of this case is shown in Figure DJM-49 below.
66
67
Figure DJM-49 Multibeam MLE—Three Sum Beam MLE Using Seven
Overlapping Subarrays of 24 Elements Each
It can be seen from the above figures that the Three Sum Beam MLE using seven overlapping subarrays of 24 elements each provides RMSE accuracy very nearly as good as the Full Array MLE.
68
4.0 Summary of Results—Comparisons of Accuracies of All Approaches
A comparison of the accuracy (RMSE) of all the cases considered in this paper is displayed in the two tables of Figure DJM-50 below.
|Ty*L/ | 0 0.1
0.2
Summary of Results
Accuracy (RMSE) Performance(msines)
SNRU0=20dB
0.3
0.4
0.5
0.6
General Case
Specific Case
Conventional Monopulse
Linear Delta/Uniform Sum, Uniform Transmit
Linear Delta/Uniform Sum, 2:1 Spoiled Transmit
Bayliss Delta/Taylor Sum, Uniform Transmit
Bayliss Delta/Taylor Sum, 2:1 Spoiled Transmit
1.86
2.63
2.35
3.32
1.91
2.67
2.41
3.37
2.09
2.81
2.62
3.52
2.41
3.04
3.00
3.78
2.95
3.38
3.65
4.17
3.82
3.82
4.71
4.71
5.27
4.38
6.54
5.44
0.7
7.87
5.06
9.99
6.42
0.8
13.34
5.83
17.69
7.73
0.9
30.12
6.67
43.09
9.54
Full Array DBF MLE
Full Array w Uniform Transmit
Full Array w 2:1 Spoiled Transmit
Multiple Beam DBF MLE
Multiple Independent Sum Beams
Two Independent Sum Beams w Uniform Transmit Beam
Two Independent Sum Beams w 2:1 Spoiled Transmit Beam
Three Independent Sum Beams w Uniform Transmit Beam
Three Independent Sum Beams w 2:1 Spoiled Transmit Beam
Sum and Delta Beam Pair DBF MLE
Uniform Sum, Linear Delta (Two Beam) DBF MLE
Taylor Sum, Bayliss Delta (Two Beam) DBF MLE
Three Pairs of Uniform Sum, Linear Delta (6 Beam) DBF MLE
1.86
2.63
1.87
2.65
2.38
1.86
2.35
1.86
1.89
2.64
1.96
2.74
2.36
1.91
2.41
1.89
1.98
2.67
2.24
3.01
2.35
2.09
2.62
1.98
2.16
2.73
2.77
3.48
2.38
2.41
3.00
2.16
2.45
2.81
3.69
4.22
2.54
2.95
3.65
2.45
2.92
2.92
5.29
5.29
2.93
3.82
4.71
2.92
3.68
3.06
8.23
6.84
3.75
5.27
6.54
3.68
5.05
3.24
14.33
9.16
5.47
7.87
9.99
5.05
7.94
3.47
29.28
12.70
9.56
13.34
17.69
7.94
16.98
3.76
82.68
18.30
23.28
30.11
43.09
16.98
1 inf
7.47
inf
12.06
inf
4.12
inf
27.84
inf inf inf inf
Subarrayed DBF MLE
Two Adjacent Non-Overlapped (Independent) Subarrays DBF MLE (21 elems ea)
Seven Adjacent Non-Overlapped (Independent) Subarrays DBF MLE (6 elems ea)
Three (Corr) Sum Beams from Seven Overlapped Subarrays DBF MLE (24 elems ea) a) RMSE in Millisines
2.14
1.88
2.66
2.19
1.91
2.67
2.33
2.01
2.71
2.59
2.19
2.82
3.03
2.49
3.06
3.74
2.97
3.53
4.95
3.76
4.42
7.18
5.18
6.19
12.10
8.18
10.24
28.03
17.61
23.68
inf inf inf
Summary of Results
Accuracy (RMSE*L/ ) Performance
SNRU0=20dB
0.3
0.4
0.5
0.6
/L= 47.6
msines
General Case
Specific Case
Conventional Monopulse
Linear Delta/Uniform Sum, Uniform Transmit
Linear Delta/Uniform Sum, 2:1 Spoiled Transmit
Bayliss Delta/Taylor Sum, Uniform Transmit
Bayliss Delta/Taylor Sum, 2:1 Spoiled Transmit
Full Array DBF MLE
Full Array w Uniform Transmit
Full Array w 2:1 Spoiled Transmit
Multiple Beam DBF MLE
Multiple Independent Sum Beams
Two Independent Sum Beams w Uniform Transmit Beam
Two Independent Sum Beams w 2:1 Spoiled Transmit Beam
Three Independent Sum Beams w Uniform Transmit Beam
Three Independent Sum Beams w 2:1 Spoiled Transmit Beam
Sum and Delta Beam Pair DBF MLE
Uniform Sum, Linear Delta (Two Beam) DBF MLE
Taylor Sum, Bayliss Delta (Two Beam) DBF MLE
Three Pairs of Uniform Sum, Linear Delta (6 Beam) DBF MLE
|Ty*L/ | 0
0.039
0.055
0.049
0.070
0.039
0.055
0.039
0.056
0.050
0.1
0.040
0.056
0.051
0.071
0.040
0.055
0.041
0.057
0.050
0.2
0.044
0.059
0.055
0.074
0.042
0.056
0.047
0.063
0.049
0.051
0.064
0.063
0.079
0.045
0.057
0.058
0.073
0.050
0.062
0.071
0.077
0.088
0.052
0.059
0.078
0.089
0.053
0.080
0.080
0.099
0.099
0.061
0.061
0.111
0.111
0.062
0.111
0.092
0.137
0.114
0.077
0.064
0.173
0.144
0.079
0.7
0.165
0.106
0.210
0.135
0.106
0.068
0.301
0.193
0.115
0.8
0.280
0.123
0.372
0.162
0.167
0.073
0.615
0.267
0.201
0.9
0.633
0.140
0.905
0.200
0.357
0.079
1.737
0.384
0.489
1 inf
0.157
inf
0.253
inf
0.087
inf
0.585
inf
0.039
0.049
0.039
0.040
0.051
0.040
0.044
0.055
0.042
0.051
0.063
0.045
0.062
0.077
0.052
0.080
0.099
0.061
0.111
0.137
0.077
0.165
0.210
0.106
0.280
0.372
0.167
0.633
0.905
0.357
inf inf inf
Subarrayed DBF MLE
Two Adjacent Non-Overlapped (Independent) Subarrays DBF MLE (21 elems ea)
Seven Adjacent Non-Overlapped (Independent) Subarrays DBF MLE (6 elems ea)
Three (Corr) Sum Beams from Seven Overlapped Subarrays DBF MLE (24 elems ea) b) RMSE Normalized to
/L
0.045
0.039
0.056
0.046
0.040
0.056
0.049
0.042
0.057
0.054
0.046
0.059
0.064
0.052
0.064
0.079
0.062
0.074
0.104
0.079
0.093
0.151
0.109
0.130
0.254
0.172
0.215
0.589
0.370
0.498
Figure DJM-50 Accuracy Comparison of Conventional Monopulse, Full Array
DBF MLE and Multiple Beam DBF MLE Cases inf inf inf
The comparison of performance above is based on a single reference L-Band linear array radar configuration consisting of 42 omni-directional radiating/receiving elements spaced at half-wavelength. The reference signal-to-noise ratio of 20dB for all cases is for a uniformly weighted transmit beam and a uniformly weighted sum receive beam, both
69
boresighted at the target direction. For simplicity of analysis, the target direction is taken to be aligned with the array broadside.
The accuracy results in Figure DJM-50a are tabulated in units of millisines (msines), which are approximately equivalent to milliradians for small values of the RMSE. The peak-to-null beamwidth of the example (uniformly illuminated) array is
/L=0.0476 or
47.6msines. Normalization of the target incidence direction to
/L takes out the array frequency of operation effect on the radar accuracy performnce.
The same accuracy results normalized to 47.6msines are displayed in Figure DJM-50b .
These results are relatively insensitive to the number of elements in the array and to its frequency of operation.
5.0 Conclusions
The following conclusions may be drawn from the analysis and results presented in this paper:
1) Full Array MLE offers the best accuracy performance in all directions. It achieves the Cramer-Rao bound on RMSE.
2) Six Beam MLE using Three Pairs of Sum and Delta Beams is virtually equivalent in accuracy performance to the Full Array MLE.
3) Seven Subarray MLE using 6 Elements per subarray provides accuracy performance very close to that of the Full Array MLE.
4) Conventional Monopulse Accuracy using uniformly weighted sum and linearly weighted delta beams is better than that of the Two Uniform Sum Beam MLE, near and off-boresight. For a target at boresight the accuracy performance of the two different approaches equals that of the Full Array MLE.
5) The Two Uniform Sum Beam MLE accuracy is better for targets near boresight than that of Conventional Monopulse with Taylor, Bayliss weighted sum and delta beams, but falls off worse for targets off-boresight.
6) Even though the processing is different, Two Beam MLE using Sum and Delta
Beams is very close to equivalent in accuracy performance to Conventional
Monopulse using the same two beams.
7) Two Subarray MLE using the two halves of the array gives accuracy performance slightly better than that of Conventional Monopulse with Taylor Sum and Bayliss
Delta Beams. However, while it’s near-boresight performance is not as good as that of Conventional Monopulse with Uniform Sum and Linear Odd Delta Beams, it provides better off-boresight performance.
70
8) Three Independent Uniform Sum Beam MLE provides off-boresight accuracy performance better than that of the Two Independent Sum Beam MLE and also better than that of Conventional Monopulse. Its near boresight accuracy performance is close to that of Conventional Monopulse with Taylor,Bayliss weightings, but not as good as the near boresight accuracy of Conventional
Monopulse with Uniform Sum and Linear Odd Delta Beams.
9) Three (correlated) sum beam MLE formed from seven overlapped weighted subarrays offers accuracy performance almost as good as that of Three
Independent Sum beams while providing much better sidelobe protection.
10) Transmit beam spoiling improves far off boresight accuracy at the expense of near boresight performance.
6.0 Recommendations for Future Work
This paper has developed algorithms and accuracy performance for a Full Array
Maximum Likelihood Estimate and a Multiple Beam Maximum Likelihood Estimate of target direction for a DBF radar. Performance has been compared to that of a conventional delta/sum monopulse radar. The paper was limited in scope as follows:
1) A single narrowband far-field target echo direction of unknown complex amplitude.
2) A line array with uniformly spaced isotropic elements.
3) No equipment errors or mismatches
4) In-clear accuracy performance
It follows naturally that the work in this paper may be extended by removing each of these scope limitations.
Even within the framework of a line array with uniformly spaced elements, the work in this paper may be extended as follows:
1) Extend to multiple simultaneous target echoes and directions
2) Extend to wideband signals
3) Extend to near field echoes
4) Extend to stochastic signals
5) Incorporate the effects of receiver equipment errors and mismatches.
6) Extend the processing and performance to interference environments such as clutter, multipath, and electronic jamming.
In addition, the extension to a 2-dimensional array would open up additional areas for future work such as beam cluster size and shapes—rectangular, circular, elliptical, polygonal, etc..
Finally, the work might be extended to include the limitations and efficacies of the MLE search algorithm employed, the interaction between the detection and estimation processes, and/or to the size, speed, technology of the required processor implementation.
71
7.0 Appendices
Appendix 1: Cramer-Rao Bound for Full Array Target Direction
Accuracy p ( r
)
( 2
n
2
)
N exp(
|| r
Ag
T
( T y
)
( T y
) ||
2 r
/
is given by
2
n
2
) .
The main parameter in this pdf to be estimated is T y
, the target direction. However, the target echo complex amplitude A=A
1
+jA
2
is also unknown and must be simultaneously estimated.
Define a 2x1 complex parameter vector
T y
A
*
. The Cramer-Rao bound for the
M
2
T y
(
M
N
) log(
p log(
1
E
(
{(
( r
2
,
)
2 n
)
|
1 , 1
))
, where
)(
( r
N
)
} and log(
A
*
M g
T
2
(
) is the 2x2 Hermitian Fisher Information matrix given by
2 n
)(
)
r
||
r
Ag
T
Ag
)
T
/
2
||
2
2 n
/ 2
2 n
Taking the required derivatives
/
/
T
A y
*
Re{ A
*
(
( g g
T
T
)( r
g
T
)(
Ag
T r
) /
Ag
T
2
)}
2 n
/
n
2
Consequently, the 2x2 Hermitian Fisher Information matrix is
M
(
E
{
E {
|
Recall that
M (
)
(
)
g
A
T
E
|
2
{
)(
(
(
Re{
A
T
r g
T
|
(
A
Re
Ag
)(
E {(
A g
|
T
*
2
2
(
(
{ r
T
g
A g
T
r
T
T
*
(
)
||
g
)(
T
)(
T
r g
Re{
)(
Ag
r
T
Ag
T
T
T
A
Ag
)(
*
g
(
r g
T
)(
Ag
T
)(
T
T
g
T
r
r
T
)
)(
)(
Ag
||
2
r
)
T
/
Ag
r
n
Ag
Ag
T
/
/
2
g
)
T
T
2
n
2
)}
)(
Ag
T
2
(
T
T
2 n
/
r
)}
)
(
)
}
2 n
/
Ag g
A
T
T
*
2
( n
Re{
4
T
)
A
)}
T g
/ n
2
I
||
A
T
/
4
*
(
2
(
n
)} 2
g
T
(
r
4 n
, so that
g
4
T n
T
4
/
g
T
)
||
2
)(
/
)( g
2
T
r
2 n
) /
Ag
T
2
2 n
)}
/
.
2 n
(
r
A * g
T
)( g
T
) / 2
2 n
A *
A
*
(
( g
T g
T
(
T
)(
g
)(
T
g
T
r g
)(
T
r
)
Re{
Ag
T
)(
r
Ag
A *
T
)(
(
r
T
Ag
)( r
T
A
)(
*
g g
T
r
A
*
T
g
T
)(
)(
A
* g g
)(
r
T
T
)
Ag
/ 4
g
T
)(
) /
T
g
T
4
4 n
)}
)
4 n
/
}
/
4
2
4 n
4 n
}
}
Also note that the vectors
and
are orthogonal, so that
72
M (
)
| A |
2
( g
T
2
N
Ag
T g
T
2
T
N
||
/
y ||
2
2
2 n
/
2
0
) /
n
2
A
* g
T g
T g
T
2
N /
N /
2
2
n
2
2 n
.
It now follows that the inverse of the Fisher information matrix is
M
1 (
)
g
T
2 N
Ag
T T
/ 2
N /
2 n
2
n
2 | A | 2
A *
( 2
T
N
T
g
T
N g
T
2 ||
/ 2
y
|| 2
2 n
) /
n
2
/[| A | 2 g
T
4 N ||
y || 2 /
2
0
] / 2
4 n
From the above, the Cramer-Rao bound on the direction estimate mean-square-error
(MSE) is given by:
2
T y
n
2
/(| A |
2 g
T
2
||
y ||
2
/
2
0
) .
It was shown in Section 3.1.1 of this paper that the right hand side of this inequality is identical to the MSE accuracy performance achieved by the Full Array MLE. Hence, the
Full Array MLE of target direction exhibits a MSE accuracy which achieves the Cramer-
Rao Lower Bound.
Appendix 2 Monte Carlo “Exact” Monopulse Accuracy Performance vs
High SNR Approximate Accuracy Performance
In this paper high SNR approximations were used to get the accuracy performance results for the Conventional Monopulse and also for the MLE techniques. One can reasonably inquire as to how close the accuracy performances associated with these approximations are to exact accuracy performance. The author was unable to derive a suitable closed form exact performance result, and so a Monte Carlo simulation was developed for that purpose.
“Exact” Monopulse Performance via Monte Carlo Simulation
Recall that T
ˆ y
f
1
(Re{ r
/ r
}) , where r
w
T
r
, r
w
T
r
, f ( T y
)
( T y
) /
( T y
) ,
( T y
)
w
T
( T y
) ,
( T y
)
w
T
( T y
) , ||
w
||
||
w
||
1 , and
w
w
0
Also recall that the vector of elemental received data is r
Ag
T
( T yT
)
( T yT
)
n , where
T yT
is the actual target direction. Thus, the delta beam output is given by r
w where
T
r
(
T yT
Ag
)
T
( T yT
w
T
)
w T
( T yT
( T yT
)
)
and
w n
T
n
w
T
Ag
n .
T
( T yT
)
( T yT
)
n
Also, the sum beam output is where
( T yT
)
w
T
( T yT
) and r
n
w
T
w
T
r
n
.
Ag
T
( T yT
)
w
T
( T yT
)
w
T
n
Ag
T
( T yT
)
( T yT
)
n
73
The author has written a Matlab Monte Carlo simulation program to calculate the estimate and its RMSE relative to the actual target location using randomly selected zero mean complex Gaussian noise samples and a signal echo amplitude of 20dB as in the approximate high SNR analysis of Section 2.1.1. All array parameters are also the same.
The simulation uses 1000 Monte Carlo trials at each target direction to develop the estimate and it’s sample RMSE. Figure DJM-42 shows the comparison of results for the
Monte Carlo Simulation versus the high SNR approximate analysis.
Figure DJM-42 Comparison of “Exact” Accuracy (Monte Carlo 1000 trials per target direction) with High SNR Approximate Results
The figure shows excellent agreement between Monte Carlo (blue trace) and approximate (red trace) for boresight and near boresight target directions
(|Ty|<=0.03=0.63
/L). For targets farther from boresight, the SNR falls off and the high
SNR approximation starts to break down. This results in a somewhat optimistic accuracy performance prediction for the high SNR approximation for targets far off boresight.
Usually this is not significant in a well-managed radar time-energy management approach where the search beams are tightly packed and adjacent beam estimates are combined properly. This tight beam packing and combining of adjacent beam estimates ensures that near boresight accuracies are predominant.
The comparison above confirms the quality and validity of the high SNR approximate accuracy performance results presented in this paper.
74
8.0 References
1) A. Lee Swindlehurst and Petre Stoica, “Maximum Likelihood Methods in Array
Signal Processing”, Proceedings of the IEEE, Vol. 86, No. 2, February 1998
2) Chiao-En Chen, “Theory and Applications of Parametric Estimation Methods for
Sensor Array Signal Processing” 2008 PhD Dissertation, University of California
3) A. van den Bos, “A Cramer-Rao Lower Bound for Complex Parameters”, IEEE
Transactions on Signal Processing, Vol. 42, No. 10, October, 1994
4) A. Farina, “Antenna Based Signal Processing Techniques for
Radar Systems”. Norwood, MA: Artech House, 1992.
5) P. Stoica and K. Sharman, “Maximum likelihood methods for
direction-of-arrival estimation,” IEEE Trans. Acoust., Speech,
Signal Processing, vol. 38, pp. 1132–1143, July 1990.
6) D. Slepian, “Estimation of signal parameters in the presence
of noise,” IRE Trans. Prof. Group Inform. Theory, vol. 3, pp.
68–89, 1954.
7) R.A. Fisher, “On the Mathematical Foundations of Theoretical Statistics”,
Philosophical Transactions of The Royal Society, A, 222:309-368 , 1922
8) Harry L. Van Trees,
“Detection, Estimation, and Modulation Theory, Part 1” , John
Wiley and Sons, 1968
9) Cramér, Harald. “Mathematical Methods of Statistics”. Princeton, NJ: Princeton
Univ. Press, 1946
10) Rao, Calyampudi Radakrishna. "Information and the accuracy attainable in the estimation of statistical parameters". Bulletin of the Calcutta Mathematical Society
37 : 81–89, 1945
11) Rao, Calyampudi Radakrishna. S. Das Gupta. ed. Selected Papers of C. R. Rao.
New York: Wiley , 1994
12) Skolnik,MI and Murrow, David J, “Radar Handbook, 2d Edition”, Chapter 20,
McGraw-Hill, 1990
13) Taylor, T.T., “Design of Line-Source Antennas for Narrow Beamwidth and Low
Side Lobes”., IRE Transactions, Antennas and Propagation, January 1955, 16-28.
14) Bayliss, E.T. “Design of Monopulse Antenna Difference Patterns with Low Side
Lobes ”, The Bell System, Technical Journal, May-June 1968, 623-650.
15) Dr. Nickel, Ulrich, “Fundamentals of Signal Processing for Phased Array Radar”,
Research Institute for High-Frequency Physics and Radar Techniques (FHR), RTO-EN-SET-
086
75