COMBINING GENETIC ALGORITHMS AND BOUNDARY
advertisement

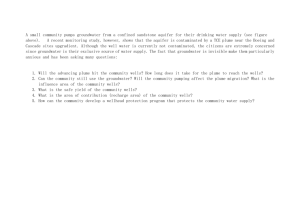
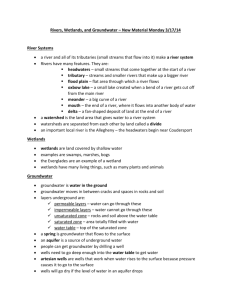
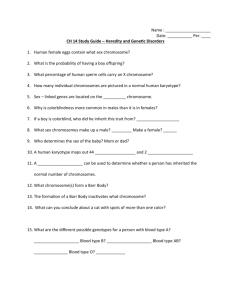
Combined use of BEM and genetic algorithms in groundwater flow and mass transport problems K. L. Katsifarakis1, D. K. Karpouzos2 and N. Theodossiou3 Division of Hydraulics and Environmental Engineering, Dept. of Civil Engineering, A.U.Th. GR-54006 Thessaloniki, Macedonia, GREECE E-mail: klkats@civil.auth.gr1, dimkarp@civil.auth.gr2 niktheo@vergina.eng.auth.gr3 . Abstract The boundary element method (BEM) can be used very efficiently, in solving groundwater flow problems. Genetic algorithms (Gas), on the other hand, constitute a very efficient optimization tool. In this paper, BEM and Gas have been combined to find optimal solutions in 3 classes of commonly encountered groundwater flow and mass transport problems: a) Determination of transmissivities in zoned aquifers (inverse problem), based on a restricted number of field measurements b) Minimization of pumping cost from any number of wells under various constraints and c) Hydrodynamic control of a contaminant plume, by means of pumping and injection wells. Application examples show that the proposed combination is very efficient in optimizing development and protection of groundwater resources. Keywords Groundwater flows; Groundwater pollution control; Boundary elements; Genetic algorithms; Optimization 1. Introduction Fresh water availability is a basic prerequisite for development of human activities. Water shortages occur quite often in many areas of the world, calling for optimal management of both surface and ground water resources. Groundwater resources are more abundant at the global scale. Moreover, their quality is usually better, since they are naturally more protected. It should be mentioned though, that, once polluted, their restoration is more difficult. The need for optimal use and protection of groundwater resources calls for improved simulation and optimization techniques. Such a technique is presented in this paper. It consists of a combination of a boundary element code and a genetic algorithm. The former is used to simulate groundwater flow, while the latter serves as optimization tool. The aforementioned technique can be used in a wide range of problems. The boundary element code can simulate flows in aquifers consisting of any number of zones of different transmissivities, while the genetic algorithm requires only proper definition of the function, which should be minimized or maximized. The two codes, which constitute the proposed technique, are briefly outlined in the following paragraphs. Then their use is illustrated, through application examples to three problems, commonly encountered in groundwater hydraulics, namely: a) Determination of transmissivities in zoned aquifers (inverse problem), based on a restricted number of field measurements b) Minimization of pumping cost from any number of wells under various constraints and c) Hydrodynamic control of a contaminant plume, by means of pumping and injection wells. 2. The boundary element code A boundary element code is used to calculate hydraulic head and/or velocity values at selected points of the flow field. The boundary element code (BEM) is probably the most versatile method in solving steady-state groundwater flow problems. In many such problems, hydraulic heads φ and/or velocities V are required in very few points of the flow field only. This requirement fits perfectly with the main feature of BEM, in which discretization is restricted to only the external and internal field boundaries. The resulting values of φ and q = φ/n on the boundaries, permit calculation of φ and V at each internal point separately. Thus, calculation of φ and V values at irrelevant points of the flow field (e.g. grid nodes) is completely avoided. Moreover, velocities are calculated directly (not through differences of adjacent φ values). Finally, an equally important advantage of BEM is that wells are described very accurately as concentrated 2 «loads», i.e. without distributing well flow rates to grid elements. This property of BEM allows precise calculations at the vicinity of wells, which is the most important field area in a large number of practical problems. The proposed boundary element code has been extensively tested in applications to zoned aquifers e.g.[1]. It is based on constant boundary elements, for the following reasons: a) They simulate real flow field boundaries such as constant head and impermeable boundaries quite accurately b) They permit analytical calculation of the coefficients of the unknowns' system and c) Their accuracy is satisfactory [2]. 3. The genetic algorithm code Genetic algorithms are a mathematical tool, with a very wide range of applications, e.g. [3]. They are particularly efficient in optimization problems, especially when the respective objective functions exhibit many local optima or discontinuous derivatives. Of late, they are becoming popular in the field of groundwater hydraulics, too [4,5]. There are already extensive textbooks, e.g. Goldberg [6] and Michalewicz [7], which deal with the theoretical background, the computational details and applications of genetic algorithms (and other evolutionary techniques). Their main concepts, together with the features of the particular code, which is used in this paper, are briefly described in the following paragraphs. Genetic algorithms are essentially a mathematical imitation of a biological process, namely that of evolution of species. To solve a problem, they start with a number of random, potential solutions of that problem. These solutions, which are called chromosomes, constitute the population of the first generation. In binary genetic algorithms, each chromosome is a binary string of predetermined length. Each chromosome of the first generation undergoes evaluation, by means of a pertinent function or process. This process depends entirely on the specific application of genetic algorithms. Then, the second generation is produced, by means of certain operators, which imitate biological processes and apply to the chromosomes of the first generation. The main genetic operators are: a) selection 3 b) crossover and c) mutation. Many other operators have also been proposed and used. Selection is used first. It leads to an intermediate population, in which better chromosomes have, statistically, more copies. These copies replace some of the worst chromosomes. Then, the other operators apply to a number of randomly selected members of this intermediate population. The result is an equal number of new chromosomes, i.e. new solutions, which replace the old ones. Thus, the next generation is formed. The whole process, i.e. evaluation-selection-crossover-mutation-other operators, is repeated for a predetermined number of generations. It is anticipated that, at least in the last generation, a chromosome will prevail, which represents the optimal (or at least a very good) solution to the examined problem. The features of the genetic operators, which have been included in the proposed code, are outlined in the following paragraphs. 3.1 Selection Selection can be accomplished in many ways. The most common processes are: a) The biased roulette wheel and b) The tournament method. The latter has been preferred, because it applies equally well to maximization and to minimization problems, while the former applies naturally to maximization problems only. Selection through the tournament method starts with determination of the respective selection constant KK (which has been set equal to 3, in all applications). Then it proceeds in the following way: KK chromosomes are randomly selected from the population of the current generation, and their fitness values are compared to each other. The chromosome with the best (largest or smallest) fitness value passes to the intermediate population. This process is repeated PS times, PS being the population size. In this way, the intermediate population is formed. Moreover, in our genetic code, the best chromosome of each generation is separately passed to the new generation. 3.2 Crossover Crossover applies to pairs of chromosomes, which are binary strings of length 4 SL. Two chromosomes, which are named parents, are randomly selected from the intermediate population. An integer number XX, between 0 and (SL-1), is also randomly selected. Then each parent binary string is cut to 2 pieces, immediately after position XX. The first piece of each parent is combined with the second piece of the other. In this way, two new chromosomes are formed, which are called offspring and substitute their parents in the next generation. Crossover aims at combining the best features of both parents to one offspring. All chromosomes of the intermediate population have equal probability of undergoing crossover. But this probability is actually larger for the better chromosomes of the parent generation, because they have got more copies in the intermediate population. 3.3 Mutation Mutation applies to characters (genes), which form the chromosomes. In binary genetic algorithms, the gene, which is selected for mutation, is changed from 0 to 1 and vice versa. This process aims at: a) extending the search to more areas of the solution space (mainly in the first generations) and b) helping local refinement of good solutions (mainly in the last generations). The mutation probability is equal for all genes of all chromosomes. Its magnitude depends on the chromosome length SL, but generally it is much smaller than the respective crossover probability, because the latter refers to chromosomes, not to genes. 3.4 Antimetathesis Many additional operators have been proposed in the literature, to further improve performance of genetic algorithms. A number of them are problem specific, while others are of general use. In this paper, one more operator, of general use, has been included. This operator has been proposed by Katsifarakis and Karpouzos [8]. It applies to pairs of successive positions (genes) of a chromosome. Any position (except for the last one) can be selected, with equal probability pa. If the value of the selected gene equals to 1, it is set to 0, while that of the following gene is set to 1. The opposite happens if the value of the selected gene is 0. More explicitly, the following happen, with regard to gene pairs: 5 11 becomes 01 00 becomes 10 10 becomes 01 01 becomes 10 In the first two cases, the operator is equivalent to mutation at the selected position. In the last two though, it is equivalent to mutation of both genes. Morover, it can be interpreted as a limiting case of the inversion operator. The new operator has been called antimetathesis, based on its function (when different from mutation). This name is in line with tradition in genetic algorithm terminology, which calls for terms of greek origin. Antimetathesis and mutation are used interchangeably (in the even and odd generations respectively). It has been anticipated that this combination is the most effective, both in refinement of good solutions and in exploring different areas of the solution space. The contribution of antimetathesis in refining a good solution can be seen through the following example: A genetic algorithm is used to find the optimum value of function F(x), x being an integer between 0 to 1000. Let’s assume that this optimum occurs for x = 82, and that a good approach, i.e. x = 81, has already been obtained. In binary form 82 = [0001010010], while 81 = [0001010001], since each chromosome should have 10 digits, to be able to represent values up to 1000. Comparing the 2 chromosomes, one can see that mutation can not improve the solution. Antimetathesis, though, can lead to the optimum, if applied to the 9th position of the chromosome. On the contrary, mutation can produce the optimum value, starting from x = 83. So, in this sense, mutation and antimetathesis are complementary to each other. Antimetathesis is also complementary to mutation in leading search to different solutions, for the following reason: The jump, or change caused by mutation, is always equal to a power of 2. The change introduced by antimetathesis is equal to 2i - 2i-1. Thus, the solution space can be searched more thoroughly, if the two operators are used interchangeably. 3.5 Handling constraints In many applications, optimization is subject to constraints. This means that 6 chromosomes, which result from genetic operators, may represent infeasible solutions. The usual way to deal with constraints, is to include penalty functions in the evaluation process. Each penalty function affects the fitness value of chromosomes, which violate the respective constraint, increasing it in minimization problems and decreasing it in maximization ones. Other approaches include rejection of infeasible chromosomes and modification of genetic operators. Constraint handling depends essentially on the particular problem. For this reason, it is further discussed in conjunction with two application examples. 4. The complete numerical tool Boundary elements have already been combined with genetic algorithms, in the field of groundwater hydraulics. El Harrouni et al. [9, 10] have focused their attention on heterogeneous aquifers, while Karpouzos and Katsifarakis [11] and Katsifarakis et al. [12] have worked mainly on zoned aquifers. To construct the complete simulation and optimization tool, which is described in this paper, the boundary element code has been divided in two parts. The first, which includes data input and some preliminary calculations, is executed only once. The second part has to be executed for every chromosome of every generation, since it forms the basis of the chromosome evaluation procedure. 5. Application examples 5.1 Determination of transmissivities in zoned aquifers To simulate flow and mass transport in aquifers, one should know the pertinent flow parameters, such as transmissivity. The difficulty of obtaining these parameters depends on the features of the flow field, e.g. [13, 14]. Little work has been done in zoned aquifers [11]. The code, which has been described sofar, can be used very successfully in this task. This is illustrated through application to the aquifer of figure 1, which consists of 4 zones of different transmissivities. 7 Φ = 15 F (200, 2000) E (1300, 2000) 10 l/s T3 W3 (450, 1700) 3 K (1300, 1300) D (2000, 1300) G (0, 1300) 15 l/s T4 2 T2 W2 (700, 1050) I (1350, 925) 20 l/s 4 25 l/s H (0, 600) W4 (1650, 650) T1 1 W1 (450, 500) C (2000, 350) A (0, 250) Φ=0 B (1300, 0) Figure 1. Aquifer with 4 zones of different transmissivities The outer boundary of the aquifer consists of two impermeable boundaries, namely CDE and FGHA, and two constant head boundaries, namely ABC and EF, with φ = 0 and φ = 15, respectively. Four wells, one in each zone, pump at constant flow rates, which appear, together with well coordinates, in figure 1. Hydraulic head, under steady state flow conditions, is measured at four control points, which also appear in figure 1 (as small triangles). The respective coordinates are shown in table 1. 8 Table 1. Coordinates and hydraulic heads at control points xi yi φmi 500 480 -8.07 650 1050 -20.7 500 1600 -26.08 1700 700 -11.69 In our example, field measurements are substituted by virtual ones, which have been derived in the following way: The direct problem is solved for the hydraulic head φmi at the control points, using the transmissivity values, which appear in table 2. The results are shown in column 3 of table 1. Table 2 Real transmissivities of the aquifer zones (in m2/s) T1 = 0.002 T2=0.0005 T3 = 0.0001 T4 = 0.001 The transmissivities, which appear in table 2, are considered as the real ones, i.e. those which should be calculated, by means of the proposed code. To achieve this, the following adjustments have been made, regarding the chromosome structure and the evaluation process: Each chromosome is a binary string, which represents a combination of 4 transmissivity values (one for each aquifer zone). These values are multiplied by a large number, in our case 106. The resulting integer numbers of the decimal system can be transformed easily to binary ones and vice versa. The search space for each transmissivity extends from 0 to 10000 (0.01106). This means that it is assumed (e.g. based on a geological field survey or other preliminary estimates) that the maximum possible transmissivity value Tmax is less than 0.01. The choice of Tmax is deliberately large (compared to the “real” transmissivities), in order to investigate the efficiency of the code. Tmax determines the chromosome length, in the following way: In order to exceed 10000, a binary number should have at least 14 digits. Thus, the 9 chromosome length equals 56, since the aquifer has got 4 zones, while Tmax is actually set at 16383. Evaluation of each chromosome includes solution of the direct problem, using the respective transmissivity combination. Thus hydraulic heads φi at the control points are calculated. Then the fitness of the chromosome V(x) is calculated as: V(x) = φi - φmi (1) that is as the difference between measured and calculated hydraulic heads. Obviously, V(x) = 0 for the exact solution. So, in this kind of applications, the best fitness value is known a priori. To apply the boundary element sub-code, the external and internal field boundaries have been divided into 28 and 19 boundary elements respectively. Their length does not exceed 300m, nor the double of their distance from wells (and control points). Finally, the parameters, which have been used in the genetic algorithm subcode, appear in table 3. Table 3 Parameters of the genetic algorithm sub-code Population size PS 40 Number of generations 130 Chromosome length ChrL 56 Crossover probability CP 0.40 to 0.45 Mutation/antimetathesis probability MP 0.016 to 0.018 Mutation probability has been determined on the basis of chromosome length. The product MP ChrL is kept close to but less than 1. 5.1.1 Results 10 The program has been run many times, in order to derive a statistically sound estimate of its efficiency. In all runs, the error in the final results was less than 5%, which is quite acceptable. The evolution of the fitness value for a typical run appears in the diagram of figure 2, while the respective transmissivity values appear in table 4. 60 50,45 fitness value 50 40 30 20 13,13 7,79 6,15 5,59 4,99 4,84 4,86 3,34 10 1,75 0,48 0,41 0,05 0,04 0 1 10 20 30 40 50 60 70 80 90 100 110 120 generations Figure 2 Evolution of the fitness value of each generation's best chromosome Table 4 Fitness of the best chromosome and respective transmissivity values Generation Fitness value 11 T1 T2 T3 T4 1 50.44526 7427 135 214 6976 10 13.13388 5377 263 106 747 20 7.79283 5459 375 91 744 30 6.15175 5203 373 96 879 40 5.59182 5515 377 96 843 50 4.98727 4929 381 97 811 60 4.83562 4928 383 97 819 130 70 4.85829 4888 382 97 819 80 3.33774 2025 447 101 849 90 1.74577 2020 509 101 865 100 0.47694 1998 501 101 977 110 0.40646 1993 501 101 1009 120 0.04582 1998 499 100 1001 130 0.03941 1999 499 100 1001 5.1.2 Field measurement errors In the previous tests, exact values for the virtual field measurements have been used. In practice, though, there is always some error, of 1-2 cm. If we assume an error of 5 cm in each measurement, the best fitness value will be 0.20 (4∙0.05) instead of 0. It is reasonable, then, to assume that the additional error in transmissivity determination will be negligible, since, as shown in table 4, with fitness values as large as 0.40, the error in transmissivities does not exceed 1%. To confirm this assumption, exact φmi values, which appear again in the first column of table 5, have been replaced by the erroneous ones, which are shown in the second column. Typical results appear in column 3. The error in transmissivity estimation is again smaller than 5%. Table 5. Typical transmissivities for field measurements with reasonable errors Correct φmi Erroneous φmi Typical results -8.07 -8.12 2050 -20.7 -20.65 495 -26.08 -26.13 100 -11.69 -11.63 999 It should be mentioned, though, that in our application, hydraulic head drawdowns at the control points are significant (between 10 and 40m), due to 12 rather small distance from their respective wells and to adequate well flow rates. 5.1.3 Effect of the distance between wells and control points To further investigate the role of the distance between wells and control points, coordinates of the latter were changed. The new distances exceeded 400 m. The code has been run again several times. It always yielded quite satisfactory results for the transmissivity of zone 3. But the error in the other 3 zones was very often unacceptably large. The respective chromosome fitness values were large, too, serving as an error warning. A careful investigation, through the solution of the direct problem, revealed that hydraulic head in all control points was actually dominated by the effect of well 3, due to the small transmissivity of the respective zone. A practical guideline resulting from this investigation, is that control points should be close to the respective wells. Measurements at the wells are not recommended, because of the inaccuracy in the definition of well radius and water level oscillations. Finally, it has been checked whether it is possible to determine zone transmissivities separately, using the respective wells and control points only. Numerical experiments have shown that this is not a good practice (except for the zone with the smallest transmissivity). If, for instance, we use the well and piezometer of zone 1, we may end up with T1= 1.01310-3 m2/s (instead of the correct 210-3 m2/s). The reason for this failure is that there are many transmissivity combinations, which may produce the correct piezometric head value at the control point. Accurate determination of T1 is not guaranteed even if one more piezometer is added in zone A. 5.2 Minimization of pumping cost from a group of wells Minimization of groundwater pumping cost, through proper distribution of the total flow rate to a number of existing wells, is a problem that arises quite often in groundwater resources management. It can also be regarded as an environmental problem, namely that of minimization of energy consumption and of the respective environmental impact. From the mathematical point of view, it is a 13 typical optimization problem, and typical optimization techniques, e.g. linear and non-linear programming, have been used for its solution. The objective function, which should be minimized, is: N F C H i Qi (2) i 1 where C is a constant and N is the number of the wells, while Qi and Hi are the flow rate and the distance between ground level and water level respectively, at well i, i.e. Hi =Elevi - φi (3) The basic constraint is that the sum of the well flow rates should be equal to the water demand Qd, which is known a priori. Additional constraints may include upper bounds of water level drawdowns at the wells [8] or at protected areas of the flow field. Φ = 20 F (300, 2100) F (1800, 2100) T3 = 0.0005 W9 W8 W7 H2 (500, 1500) G (0, 1500) D (200, 1500) H1 (700, 1500) W5 W6 W2 3 T1 = 0.0001 4 W4 2 W1 T2 = 0.001 1 A (0, 250) W3 B (500, 0) Figure 3. Φ=0 C (200, 0) System of 9 wells in an aquifer with 3 zones of different transmissivities The efficiency of the proposed code in this group of problems is 14 demonstrated, through application to the aquifer of figure 3. This aquifer bears 3 zones of different transmissivities, with the following values: T1 = 0.0001 m2/s T2 = 0.001 m2/s T3 = 0.0005 m2/s Aquifer's external boundary consists of two impermeable parts, namely CDE and FGA and two constant head parts, namely ΑΒC and EF, with hydraulic head φ = 0 and φ=20, respectively. Nine wells are available to pump a total groundwater flow rate of 250 l/s. As shown in fig. 3, two of them are located in zone 1, four in zone 2 and three in zone 3. Ground elevations (Elev) at the locations of the wells, with reference to φ=0 plane, appear in table 6, together with the respective coordinates. Table 6. Coordinates and ground elevations at the locations of the wells well xi yi Elevi well xi yi Elevi 1 250 650 5 6 1600 1200 20 2 350 1100 5 7 1500 1800 30 3 1100 300 15 8 1000 1800 35 4 1200 800 15 9 500 1800 35 5 1250 1200 18 In order to implement the proposed code, the following adjustments have been made, regarding the chromosome structure and the evaluation process: Each chromosome is a binary string, which represents a combination of 9 well flow rate values Qi. To allow for the total flow rate (i.e. for 250 l/s) to be pumped from a single well, 8 genes are needed for each Qi. Thus, for 9 wells, the chromosome length SL is equal to 72. Evaluation of each chromosome includes the following steps: 15 a) Chromosome adjustment to fulfill the main constraint. Each Qi corresponds to 8 genes (digits), so it may obtain any value from 0 to 255. Therefore SQ, i.e. the sum of the 9 Qi may vary from 0 to 2295. According to the main constraint, though, SQ should be equal to Qd = 250. To fulfill the constraint, each Qi is multiplied by the factor Qd/SQ. In this way, proportions between well flow rates are preserved. b) Calculation of the hydraulic head φi at the location of each well, using the respective set of adjusted well flow rates, by means of the boundary element subcode. c) Calculation of Hi for each well, by means of equation 3. Then, the fitness value VB is calculated directly from equation 2 (in which the constant C has been set to 1). As in the previous application example, the fitness of each chromosome increases, as the value of VB decreases. To implement the boundary element sub-code, the external and internal field boundaries have been divided in 25 and 11 boundary elements respectively, as shown in figure 3. Finally, the parameters, which have been used in the genetic algorithm subcode, appear in table 7. Table 7 Parameters of the genetic algorithm sub-code Population size PS 40 Number of generations 130 Chromosome length ChrL 72 Crossover probability CP 0.40 to 0.45 Mutation/antimetathesis probability MP 0.013 5.2.1 Typical results The code has been run many times, in order to derive a statistically sound estimate of its efficiency. In all of them, the fitness value of the best chromosome of the last generation, ranged between 26.34 and 26.41. Results of a typical run appear in table 8. It includes generation number, the fitness value VB of the best chromosome and the respective 9 well flow rates. 16 Table 8. Best chromosome’s fitness value and respective well flow rates (l/s) Gen VB Q1 Q2 Q3 Q4 Q5 Q6 Q7 Q8 Q9 1 37.7833 14.88 21.22 3.90 10 27.3948 8.03 4.86 47.18 51.80 35.99 36.72 18.97 15.81 30.64 20 26.7135 7.18 4.94 50.49 47.80 32.54 34.78 24.01 23.56 24.69 30 26.4395 5.05 4.81 54.33 36.78 34.86 34.86 25.72 25.24 28.37 40 26.3914 4.99 4.75 57.51 36.60 34.22 34.46 25.43 24.95 27.09 50 26.3505 5.14 4.40 59.20 37.92 31.31 31.56 27.15 25.68 27.64 60 26.3465 5.12 4.39 60.98 37.32 31.22 31.46 26.10 25.85 27.56 70 26.3457 5.10 4.37 60.74 38.14 31.10 31.34 26.00 25.75 27.45 80 26.3457 5.11 4.38 60.80 37.94 31.37 31.37 26.02 25.78 27.24 90 26.3457 5.10 4.37 60.68 38.11 31.31 31.31 25.97 25.73 27.43 100 26.3457 5.10 4.37 60.68 38.11 31.31 31.31 25.97 25.73 27.43 110 26.3457 5.10 4.37 60.68 38.11 31.31 31.31 25.97 25.73 27.43 120 26.3457 5.10 4.37 60.68 38.11 31.31 31.31 25.97 25.73 27.43 130 26.3456 5.12 4.39 60.73 37.80 31.22 31.46 26.10 25.85 27.32 44.39 37.56 53.17 6.10 26.10 42.68 5.2.2 Introduction of additional constraints In many cases of practical interest, it is required to keep Hi smaller than a certain value, either at the wells or at certain vulnerable areas of the flow field. Such constraints can be taken into account rather easily, by incorporating a penalty function to the evaluation process. In this way, chromosomes that violate the constraints are not rejected, but their fitness decreases. As an example, a constraint regarding the shaded area of figure 3, has been added to the previous problem, which is expressed as: Hi < 60 (4) To check whether this constraint is fulfilled, 4 control points on the boundary of the shaded area are used. These points appear as small triangles in fig.3. 17 Control point 1 is the closest to well 3, control point 2 to well 1, control point 3 to wells 2, 4, 5, 8 and 9 and control point 4 to well 6. If Hi exceeds 60 at any of these points, the quantity: PEN = 10(Hi – 60)2 (5) is added to the fitness value VB of the respective chromosome. In this way, the penalty depends strongly on the degree of violation of the constraint. Table 9. Typical results for the constrained case (Qi in l/s, Hj in m) case constrained Hj unconstrained Hj erroneous Tj fitness value 29.0876 26.3456 26.472 Q1 6.78 5.12 5.12 Q2 4.91 4.39 4.35 Q3 59.64 60.73 65.06 Q4 21.75 37.80 40.98 Q5 19.88 31.22 32.79 Q6 14.97 31.46 32.27 Q7 37.65 26.10 22.80 Q8 44.90 25.85 22.54 Q9 39.52 27.32 24.08 H1 44.36 49.00 H2 55.69 64.38 H3 60.03 70.49 H4 58.40 68.43 Results of a typical run, including fitness value of the best chromosome, the respective well flow rates Qi and the values of Hj at the control points, appear in 18 column 2 of table 9. In the third column of the same table, typical results, which have been obtained without the constraint, are presented for comparison purposes. It can be seen that, as a result of the constraint, the largest Hi value decreased drastically, from 70.49m to 60.03m. Fulfillment of the constraint, though, resulted in an increase of 10.4% in the pumping cost, which is proportional to the fitness value. 5.2.3 Errors in transmissivity values In the previous tests, it has been assumed the transmissivities of aquifer zones are known exactly. In practice, though, approximations of the order of 10% are considered as satisfactory. If the degree of over or underestimation is the same for all transmissivities, the optimal combination of well flow rates remains practically unchanged, because of the proportional change of all φi values. So such errors do not affect the optimization process, despite the resulting changes in chromosome fitness values. The worst error combination is overestimation of some transmissivities and underestimation of others. To investigate this case, T2 has been set to 0.0011 m2/s (instead of 0.001 m2/s), while T3 has been set to 0.00045 m2/s (instead of 0.0005 m2/s). Results of a typical run, including the “corrected” (i.e. for the real transmissivities) fitness value of the best chromosome, together with the respective well flow rates, appear in table 9; column 4. It can be seen that, differences from the reference case (column 3 of table 9) are rather small, while the increase of cost is 0.5% only. The conclusion is that reasonable errors in transmissivity values have acceptable impact upon the proposed optimization process. 5.3 Hydrodynamic control of a contaminant plume Groundwater is in many cases the major source for water supply. Moreover, aquifer restoration requires time - and money- consuming procedures. Thus, groundwater contamination, which may be caused by disposal of pollutants into natural water systems, is a very important environmental problem. 19 Several restoration techniques, which can be expressed as management problems, have been developed through the years involving hydrodynamic control and in-situ remediation. Greenwald and Gorelick [15] provide a detailed literature review on the subject by classifying the available methodologies according to their general goals. In their works Theodossiou et al. [16] and Mylopoulos et al [17] presented optimization techniques for aquifer cleanup, aiming at the minimization of treatment costs, expressed as linear or nonlinear objective functions. In the former work, a classical one-stage optimization approach was used, whereas in the latter a sequential optimization procedure was proposed. According to this procedure, at the end of each time period the effectiveness of the calculated optimum pumping strategy is checked, by updating the plume boundary through the application of a solute transport model. Moreover, Latinopoulos et al. [18] examined the effects of the transmissivity changes upon the optimal solutions of the management problem. The proposed combination of a boundary element and a genetic algorithm code has been already used by Katsifarakis et al. [12] to study hydrodynamic control of a contamination plume in a homogeneous aquifer. In that application, pumping contaminated water from 2 wells, located in the interior of the plume was taken into account. Here, the efficiency of the proposed code is further investigated, through application to the aquifer of figure 4, which consists of 2 zones of different transmissivities. The external boundary of the aquifer consists of two impermeable parts (namely BCD and FGA) and two constant head parts (namely AB and DEF) with hydraulic head φ = 0 and φ = 30m respectively. The aquifer is confined, with thickness b = 40m and porosity n = 0.2. The transmissivities of the two zones are T1 = 0.002 m2/s and T2 = 0.02 m2/s. As shown in fig. 4, a contaminant plume has been formed, which moves towards boundary AB. Coordinates and water velocities (in m/s) at 6 points of the plume boundary, which can be used as control points, are shown in table 10. The velocities have been calculated by means of the boundary element code. 20 Φ=30 F (0,3000) 30 29 28 E(1800,3000) 25 26 24 23 27 31 3 32 T2=0.02 2 33 W3 34 G(0,1600) 14 15 13 16 12 D(2400,2610) W1 4 22 5 21 W2 1 6 20 19 11 10 9 T1=0.002 C(2400,1200) 8 7 17 4 3 18 2 6 5 Φ=0 1 A(0,0) Figure 4. Contaminant plume in an aquifer with 2 zones of different transmissivities Table 10. Coordinates and velocities at the plume boundary. 21 point xi yi Vx 106 Vy 106 1 1800 2000 +0.1193 -7.2698 2 1600 2200 -0.0957 -6.6934 3 1600 2400 -0.4292 -6.4113 4 1800 2400 -0.8161 -6.8059 5 2000 2200 -0.4807 -7.6382 6 2000 2000 +0.0284 -7.6909 B(2400,600) Three wells are available, to prevent further contamination of the aquifer. Their coordinates appear in table 11, together with the respective ground elevations (Elev), with reference to φ=0 plane. Well 1 is located upflow, relative to the plume and can be used to reduce water velocities towards AB, by pumping clean water. Well 2 is located at the interior of the plume and can be used to pump contaminated water. Part or all of this water can be returned to the aquifer after treatment, through well 3, which is located downflow, relative to the plume. Table 11. Coordinates and ground elevations at the locations of the wells well xi yi Elevi 1 1800 2600 40 2 1800 2200 40 3 1600 1900 35 The optimization task is to minimize pumping cost from the first two wells. As in the previous application example, the function, which should be minimized, is: 2 F H i Qi (6) i 1 For injection well 3, which is not included in the cost function, two constraints are imposed: φ3 Elev3 (to avoid pressurized injection) Q3 Q2 (to avoid use of additional water resources) A set of additional constraints is needed to express the aim of the study, i.e. containment of contamination inside its current boundaries, or even reduction of the contaminated area. These constraints can be expressed mathematically as inequalities, involving water velocity values Vj at suitable points of the boundary of the contamination plume, e.g. at the aforementioned 6 control points. More precisely, the following constraints have been introduced: 22 Vy(1) 0 Vx(2) 0 Vx(3) 0 Vy(3) 0 Vy(4) 0 Vx(5) 0 Vx(6) 0 Vy(6) 0 5.3.1 The evaluation procedure In order to implement the proposed code, the following adjustments have been made, regarding the chromosome structure and the evaluation process: Each chromosome is a binary string, which represents a combination of 3 well flow rates Qi. To determine its length an upper bound for each well flow rate Qmax should be defined. To this end, one well pumping from an infinite field, with the same hydraulic features as zone 2 of the original one (i.e. b = 40m, n = 0.2, T = 0.02m2/s) has been considered. Its flow rate Q should equal 110 l/s, to produce velocities of about 7.69110-6 m/s at a distance of 283 m. In this calculation, the velocity at control point 6 and its distance from well 2 were taken into account. To allow for a reasonable safety margin, Qmax is set to 150 l/s. Thus, 8 genes are needed for each Qi, and the chromosome length SL equals 24. Evaluation of each chromosome starts with a comparison between Q2 and Q3. If the absolute value of the latter is larger, it is set equal to Q2. Thus, the respective constraint is fulfilled. Then, evaluation proceeds with the following steps: a) Calculation of the hydraulic head φi at the location of each well and of the velocities Vx and Vy at the 6 control points, using the respective set of well flow rates, by means of the boundary element sub-code. b) Calculation of Hi for each well and of the fitness value VB, the latter from equation 6. c) Check for constraint violations. As far as velocities are concerned, a penalty 23 equal to 1.6 is added to VB, for each constraint violation. The number 1.6 has been derived using the notion of the respective infinite field, as in the derivation of Qmax. The penalty is double, if the constraint on φ3 is violated. To implement the boundary element sub-code, the external and internal field boundaries have been divided in 28 and 6 boundary elements respectively, as shown in figure 4. Finally, the parameters, which have been used in the genetic algorithm subcode, appear in table 12. Table 12. Parameters of the genetic algorithm sub-code Population size PS 40 Number of generations 100 Chromosome length ChrL 24 Crossover probability CP 0.40 to 0.45 Mutation/antimetathesis probability MP 0.04 5.3.2 Typical results The program has been run several times. Typical results appear in the second column of table 13. It includes the fitness value VB of the best chromosome, the respective Qi and φi values at the wells and the velocities at the control points. It can be seen that all constraints are fulfilled and that well 1 is not used at all. Table 13. Best chromosome’s fitness value and respective Qi, φi, Vxj and Vyj values VB 2.2186 2.0665 Q1 0.0 0.0 w Q2 120.0 52.0 e Q3 120.0 52.0 l φ1 28.96 29.10 l φ2 21.51 25.26 s φ3 34.60 30.46 24 c Vx1*106 +9.6840 +4.2640 o Vy1*106 +9.8055 +0.1295 n Vx2*106 +11.6875 +5.0103 Vy2*106 +1.5644 -3.1150 Vx3*106 +5.2859 +2.0473 Vy3*106 -7.4000 -6.8398 Vx4*106 +0.6905 -0.1632 Vy4*106 -14.5630 -10.1673 Vx5*106 -8.4126 -3.9178 Vy5*106 -4.6006 -6.3219 Vx6*106 -0.1842 -0.0637 Vy6*106 +0.0701 -4.3278 1.6 1.3 t r o l p o i n t s penalty value 5.3.3 Influence of the penalty value To investigate the role of the penalty value, it has been reduced to 1.3 (from 1.6) and the program has been run again. Typical results appear in column 3 of table 13. It can be seen that well flow rates are clearly smaller, but one constraint, namely Vy(6) 0, is not fulfilled. So, the respective solution is not acceptable. The conclusion is that with inelastic constraints, penalty values should be large enough to ensure their fulfillment. 5.3.4 Computer time requirement The time required to run the respective program is comparatively large. This is due to the repetitive use of the boundary element code. 6. Final remarks The combination of boundary elements and genetic algorithms, which has been described, offers an attractive and dependable alternative to classical optimization techniques in the field of groundwater hydraulics. Genetic algorithms which are based on simple mathematics, can be easily adapted to each specific problem, 25 while versatility of BEM can be fully exploited. The relative drawback of the proposed scheme, i.e. comparatively large computer time requirement, is offset by simplicity of input data preparation, which saves a lot of time for the user. REFERENCES [1] Katsifarakis K.L., Andreatos N. and Vournelis E., (1996) Application of boundary element techniques to flows through aquifers with zones of irregular shape, In: Abousleiman Y., Brebbia C.A., Cheng A.H.-D. and Ouazar D., editors. Proc. Int. Conf. Computer Methods and Water resources III. Computational Mechanics Publications 1996: 109-116. [2] Latinopoulos P. and Katsifarakis K., A boundary element and particle tracking model for advective transport in zoned aquifers, J. of Hydrology, 1991; 124(1-2): 159-176. [3] Dasgupta D., and Michalewicz, Z., (editors) Evolutionary Algorithms in Engineering Applications. Berlin Heidelberg: Springer, 1997. [4] McKinney D.C. and Min-Der Lin, Genetic algorithm solution of groundwater management models, Water Resources Research 1994; 30(6): 1897-1906. [5] Wagner B.J., Sampling design methods for groundwater modeling under uncertainty, Water Resources Research 1995; 31(10): 2581-2591. [6] Goldberg D.E., Genetic Algorithms in Search, Optimization and Machine Learning. Reading, Massachusetts: Addison-Wesley publishing company, 1989. [7] Michalewicz Z., Genetic Algorithms + Data Structures = Evolution Programs (2nd ed.). Springer-Verlag, 1994. [8] Katsifarakis, K.L., and Karpouzos D.K., Minimization of pumping cost in zoned aquifers by means of genetic algorithms. In: Katsifarakis K.L., 26 Korfiatis G.P., Mylopoulos Y.A., Demetracopoulos A.C. editors. Proc. Int. Conf. Protection and Restoration of the Environment IV. 1998: 61-68. [9] El Harrouni K., Ouazar D. and Cheng A.H.-D., Boundary and parameter identification using genetic algorithms and boundary element method. In: Abousleiman Y., Brebbia C.A., Cheng A.H.-D. and Ouazar D., editors. Proc. Int. Conf. Computer Methods and Water resources III. Computational Mechanics Publications 1996: 487-495. [10] El Harrouni K., Ouazar D., Walters G.A., and Cheng A.H.-D., Groundwater optimization and parameter estimation by genetic algorithm and dual reciprocity boundary element method, Engineering Analysis with Boundary Elements, 1996; 18: 287-296. [11] Karpouzos D.K. and Katsifarakis K.L., Combined use of genetic algorithms and boundary elements to calculate zoned aquifer transmissivities. In: Proc. 7th Panhellenic Conf. of the Greek Hydrotechnic Association. 1997: 245-252. [12] Katsifarakis K.L., Theodossiou N., and Latinopoulos P. Combined use of genetic algorithms and boundary elements in aquifer restoration problems. In: Proc. 7th Int. Conf. HYDROSOFT/98. 1998. [13] Yeh W.W.-G., Review of parameter identification procedures in groundwater hydrology. The inverse problem. Water Resour. Res.. 1986; 22, 95-108. [14] Lesnic D., Elliott L., and Ingham D.B., A. boundary element method for the determination of the transmissivity of a heterogeneous aquifer in groundwater flow systems. Engineering Analysis with Boundary Elements. 1998; 21(4) 223-234. [15] Greenwald R.M. and Gorelick S.M., Particle travel times for contaminants incorporated into a planning model for groundwater plume capture, Journal of Hydrology, 1989; 107: 73-98. [16] Theodossiou N., Latinopoulos P. and Mylopoulos Y., Quality management in groundwater systems using linear and nonlinear programming. In: Proc. of 27 the 2nd Conf. on Environmental Science and Technology, 1991: 482-490. [17] Mylopoulos Y., Latinopoulos P. and Theodossiou N., A combined use of simulation and optimization techniques in the solution of aquifer restoration problems. In: Wrobel L.C. Modelling Measuring and and Brebbia C.A. editors. Water Pollution: Prediction. Computational Mechanics Publications. 1991: 59-72. [18] Latinopoulos P., Theodossiou N., Mylopoulos Y. and Mylopoulos N., A sensitivity analysis and parametric study for the evaluation of the optimal management of a contaminated aquifer, Water Resources Management, 1994; 8: 11-31. 28