Model of Four-Quadrant Photodetector

Model of Four-Quadrant Photodetector
Xiaojun Tang, Junhua Liu, Liping Dang, Chen Jian
School of Electrical Engineering, Xi’an Jiaotong University, Xi’an ,710049, China
Abstract : Photodetector is a kind of novel sensor. In this paper, a complete mathematical model of the light path of four-quadrant photodetector has been modeled. In the model, the effects of the mounted position of four-quadrant photodetector on the conversion from light to electricity, and the structure parameters of photodetector are considered.
The relation expressions between the light signals, including lighting intensity and the incidence angle, the mounted position and structure parameters of four-quadrant photodetector, and the output signals are given. By analyzing the mathematical model, four feature parameters are extracted. With the mathematical model, arbitrary samples can be made. And with the samples, the inverse model of detector is approached using Neural Network (NN). The measurement results of distance between photosurface and focus of photodetector indicate that the model is correct.
And the base for the application of four-quadrant photodetector is founded.
Key-words : Four-quadrant photodetector; Mathematical model of light-path; Feature parameters; Inverse model
1 Introduction
With the development of semiconductor technology, many photodetector emerge [1][2] . As one type of photodetector, four-quadrant photodetector has been widely applied in photoelectric tracking, photoelectric direction, photoelectric control and guide, and so on [3] , and so on. For a sensor, the inverse model of it must be set before applied in practice. Generally, samples are made by calibration experimentation at first, and then, with the samples, the inverse model is modeled using four-quadrant photodetector are considered. The relation expressions about the light signal, including lighting intensity and the incidence angle, the position of four-quadrant photodetector, structure parameters of photodetector, and the electricity signals, the outputs, are given as: u x
( t )= f ( φ , ψ , η , l ,…) (1) u y
( t )=g( φ , ψ , η , l ,…) (2) where u x
and u y
symbolize the compositive outputs of four-quadrant photodetector. Sign
φ
,
η
and
ψ symbolize the three dimensional position parameters,
NN or other approaches. It is well known that calibration experimentation is a very time-consuming process. Specially, more the sensed variables, more the necessary samples, and the necessary time for calibration experimentation rise exponentially. If the model of sensor can be constructed be analyzing the theory of sensor, it is a very convenient.
In this paper, the mathematical models of the light path of four-quadrant photodetector in special position are constructed at first, and then, on the basis of those models, the common model is given. This model of light path, from light to electricity, is called positive model of four-quadrant photodetector. In the positive model , the effects, on the conversion from light to electricity, of the position of four-quadrant photodetector and the structure parameters of respectively. Sign l symbolizes the distance between the lens and the photosurface of photodetector
In practical measurement, what we observe are the outputs of detector and what need to be measured are some measured parameters. So the inverse function of detector, called as inverse model , must be constructed.
In order to construct the inverse model, enough samples about mounted position parameters, structure parameters of detector and the outputs of four-quadrant photodetector are obtained with positive model at first.
And then the inverse model is approached with these samples using neural network. In the end of this paper, the measurement results of distance between the focal plane and the photosurface of photodetector are given.
In the measurement results, the maximal error is only
0.1
dmm , which indicate that the mathematical model
1
of the light path of four-quadrant photodetector is correct.
2 Analysis of light path
2.1 Light path of four-quadrant photodetector
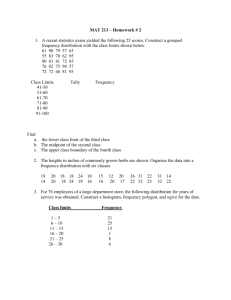
The light path of four-quadrant photodetector is shown in Fig 1. Laser emitted by point laser source passes convex called as convex 1, and then becomes parallel light. The parallel light enters four-quadrant photodetector after having been reflected by reflector.
The four-quadrant photodetector is made up of convex called as convex 2, barrel and photosurface. When working, the reflector wavers back and forth at even speed. The photosurface of detector is shown in Fig.2.
In Fig.2, sign I, II, III and IV symbolize four quadrants of detector, respectively. Little circles denote beam spot on photosurface. And all the little circles symbolize the motion track of beam spot. Define the output voltage of four-quadrant of detector as u
I
, u
II
, u
III
and u
IV
, and the output signals of detector as: u x
=( u
I
+ u
IV
)- ( u
II
+ u
III
) (3) u y
=( u
I
+ u
II
)- ( u
III
+ u
IV
) (4)
When the inclination between parallel light and reflector is 45˚, shown in Fig.1, the axis of four-quadrant photodetector is normal to the parallel light, and the beam spot is on the center of photosurface, we called this position of detector as fiducial position . It is obvious that u y
will be 0 when detector is mounted in fiducial position because the beam spot will always share alike on both sides of axes shown in Fig.1, because the area of beam spot lies in the left side of axis y doesn’t identically equal to that lies in the right side of axis y . Define R as the radius of convex 2, l as the distance between photosurface and convex 2, f as the focus of the convex 2. According to the light path, following equation holds r
R f
l f
(5) where r is the radius of the beam spot forming on the photosurface of the detector.
Define the distance between the center of beam spot and axis y as s . It is easy to obtain s=| l tan
β
|. While s < r , the area of beam spot at the right side of axis y , shown in Fig.3, is:
S r
r
2 arccos( s r
)
s r
2
s
2
(6) and the area of beam spot at the left side of axis y is:
S l
= πr 2 S r
(7)
At this time, the output voltage signals of detector are: u x
( S r
S l
) cos
[ 2 r
2 arccos( s r
)
2 s r
2 s
2 r
2
] cos
(8) u y
=0 (9) where
ρ
is the photometric brightness;
σ is the phototranslating coefficient; cos β is the efficient illumination, viz. projection of convex 2 in the cross section of the incident light;
τ
is a sign: while the center of beam spot is at the right (up) side of axis y of photosurface, τ =1; while the center of beam spot is at the left (down) side of axis y of photosurface,
τ
=-1.
While s r , in other words, whole beam spot is at one
β/2
Parallel light
Dot laser source
Condensing lens y
Reflector x
Convex lens
Middle section z x
Photosurface y
Wall of detector
Facula Detector bracket
(b)
Axis
(a)
Fig.1 Sketch map of device for adjusting photovoltaic conversion coefficient of photodetector (a) Light path (b) Coordinate system x shown in Fig.2. And u x
will change with the incidence angle of the light shining into the detector
β
, side of axis y absolutely. Then u x
=
τρπr 2 σ cos
β
(10)
2
While detector is mounted in the fiducial position, the waveforms of outputs of detector are shown in Fig.4.
Owing to β is little, β ≤2˚, cos β
1 and two extremities of waveforms of u x
are flat. Specially, substitute s=| l tan
β
| and (5) into (10), following equation holds: du x d
0
R
2
( f
l ) / f (11)
From equation (11), one finds that the slope of waveforms of u x
at time
β
=0 is directly proportional to f l , the distance between photosurface and focal plane of photodetector. y
Ⅱ Ⅰ
Ⅲ Ⅳ x s r y x
Fig.2 The photoconductive surface of detector
Fig.3 Position of focal spot while s < r
Fig.4 Waveforms of outputs of detector mounted in fiducial position
2.2 Special kinds of circumstance
In practical application, detector isn’t always in fiducial position . There may be some position errors on one or every direction. In this subsection, the input-output relation equations of photodetector under special position are discussed to indicate the relations between every kind of position error and the output signals of photodetector.
2.2.1 Pitching departure
When detector whirl around the cross section axis x , convex 2 moves on direction y (shown in Fig.1). This departure is called pitching departure . When pitching departure happens, the track of beam spot is that shown in Fig.5. In this case, owing to the center of beam spot isn’t symmetric about axis x , u y
isn’t zero, but a constant value. The value lies on the magnitude of ψ , the angle of pitching alternation. The efficient illumination isn’t cos β , but a function about β and ψ , and need to be considered renewedly. Commonly,
ψ ≤2˚, so the efficient illumination can be looked as 1. t
Ⅱ y
Ⅰ x
Ⅲ Ⅳ
Fig.5 The track of focal spot when pitching departure happen
The mounted length of detector (the length of the part of detector in the bracket of detector) is defined as
2 m . From the point of view of geometry, the distance between center of beam spot and axis x in photosuarface can be written as: t =( l m )tan
ψ
(12)
The geometry about incident light, axis x and axis y of convex 2 is shown in Fig.6. In Fig.6, AO denotes the incident light in case of β =0; A`O denotes the incident light in case of
β
>0; AC is normal to axis y ; A`D is normal to axis x ; A`E is normal to plane CEDO ; plane
CEDO symbolizes convex 2; AO = A`D and AO // A`D ;
So
CAO
ψ
. From the point of view of geometry, following equations hold.
CO = AO tan
ψ
(13)
DO = AO tan β (14)
EO
CO
2
DO
2 (15)
A`O = AO sec
β
(16)
A ` OE
arccos
EO
A ` O
arccos tan
2
tan
2 sec
(17)
In Fig.6,
A ` OE is the adjacent angle of the included angle between convex 2 and the cross section of incident light of detector, and the efficient illumination is sin
A ` OE . In case of ψ =0, viz. pitching departure doesn’t happen, equation (17) becomes
A ` OE = π /2β , hence fiducial position is a special case of pitching departure . Imitating equations (8) and (10), u y
will be:
u
u y y
sin
[
r
A ` OE
r
2
2 sin
2 r
2 arccos
A ` OE t t t
r
r
r
2 t r
2 t
2
]
(18)
In this case, take the place of cos β with sin
A ` OE , u x changes as: u x
[ 2 r
2 arccos( s r
)
2 s r
2 s
2 r
2
]
sin
A ` OE (19)
3
A
ψ
β
A`
D o
C x
E y
Fig.6 The geometry about incident light, axis x and axis y of convex
2 information of orientation departure reflects on b x
.
Fig.7 Waveforms of outputs of detector in case of pitching departure
Commonly, both β and ψ are less than 2˚, and the waveform of u y
borders up on a line. From the waveforms of outputs of photodetector, shown in Fig.7, it is easy to make out that the changes of them in this case indicate the information of mounted position of detector is chiefly reflected on b y
.
2.2.2 Orientation departure
Corresponding to pitching departure , the departure is called orientation departure when detector whirls around the cross section axis y (shown in Fig.1). In this case, the track of beam spot is that shown in Fig.8.
Because the departure angle ψ is on the same or negative direction of
β
, the track of beam spot doesn’t keep symmetry about axis y , but keep symmetry about axis x . So u y always be 0 and there is departure with the crossover point of u x
. The efficient illumination is modified as cos(
β
+
ψ
), and u x
is modified as:
u x
[ 2 r 2 arccos
r
2 s r 2 s 2 2 ]
cos(
) s
r
r
u x
r
2 cos(
) s
r
(20) y
Ⅱ Ⅰ x
Ⅲ Ⅳ
Fig.8 the track of focal spot in case of orientation departure
The outputs of detector are shown in Fig.9. From Fig.9 and equation (20) and (21), we conclude that the
Fig.9 Waveforms of outputs in case of orientation departure
2.2.3 Rolling departure
When detector rolls round the axes of it (shown in
Fig.1 and Fig.10), the departure is called rolling departure . In this case, the track of beam spot can be divided into two hefts, shown in Fig.11, one the direction x , the other on direction y . Symbolize the angle of rolling departure with
η
, corresponding to (8),
(9) and (16), u x and u y are modified as:
u
u x x
[ 2 r 2
2 s
r r
2
2
arccos(
( s cos
s cos
)
2 cos
] cos r
)
r 2 s cos
s cos
r r (21)
u
u y y
[ 2 r
2
2 s z arccos( s sin
r
)
r
2 r
2
( s cos
)
2
] cos
r 2 cos
s s sin
r (22) sin
y r
Ⅱ Ⅰ x y` x `
η x
Ⅲ Ⅳ y
Fig.10 Rolling departure
Fig.11 Track of focal spot in case of rolling departure
Fig.12 Waveforms of outputs of detector in case of rolling departure
In case of rolling departure , the output signals of detector are shown as Fig.12.
Because there are hefts in direction
4
x and y , the departure degree of rolling departure reflect primarily on the slopes on the zero point of u x and that of u y
. This can be concluded according to equation (21), (22).
2.3
Generic departure
What discussed in subsection 2.2 are three special departures. In every case, only one free dimension is considered. In common conditions, two or three departures may happen at same time, we call the departure as generic departure . By analyzing the light path in generic departure using the same method used above, following equations are obtained:
u x
u y
( t )
R 2 (arccos
( t )
R
2
(arccos
MO
2
O
2
N sin
KMO
2 sin
R
R
KNO
2
/
/
2
2
1
1 )
)
(23) where λ ( t ) symbolizes the efficient illumination, and parameters, such as the mounted position parameters
φ
,
ψ , η , and the structure parameter l or f l , and so on, need to be measured with u x
and u y
, following equations must be determined:
φ
= h ( u x
, u y
)
ψ
= i ( u x
, u y
)
η = j ( u x
, u y
) l = k ( u x
, u y
) (24)
…………
In section 2, it has been discussed that a x
, slope of waveforms of u x
at time
β
=0, contain primarily the information of l , b y
and b x
, shown in Fig.7 and Fig.9, respectively, contain primarily the information of φ and ψ , and the departure degree of rolling departure reflect primarily on slopes a x
and a y
, the slope on the zero point of u y
.
Hence, (24) can be modified as:
φ
= h` ( a x
, a y
, b x
, b y
)
ψ
= i` ( a x
, a y
, b x
, b y
)
η
= j` ( a x
, a y
, b x
, b y
) l = k` ( a x
, a y
, b x
, b y
) (25)
………… cos 2
arccos(sin
sin
)]}
2 cos
2
[arccos(si n
sin
)
]
MO
2
l
O
2
N
RO
3
S f
f
l
O
3
R sin(
RO
3 sin(
S
2
)
arccos
O
3
R
2
2 O
3
O
3
S
R
2
O
3
S
RS
2
)
O
3
R
{sin tan sin(
cos[
arcsin(sin
sec
2
sec
2
(
)
tan
2
sec
sin arccos(sin
cos(
sin
)
)))
O
3
S
2
RS
2
2 O
3
S
RS cos(
)
There is some noise in u x and u y
. In order to reduce the effect of noise on calculating a x
, a y
, b x
and b y
, here, we use following lines to approach the sections of u x and u y
when -Δ t < t <Δ t , Δ t is the set time length. u x
= a x t + b x u y
= a y t + b y
(26)
The algorithm for approaching can be Least Square
Method (LSM) [4] . Then, for the inverse model of four-quadrant photodetector, That use a x
, a y
, b x
and b y as the inputs of inverse may be more appropriate.
3.2 Approach inverse model using NN
In theory, artificial NN can approach arbitrary
RS
l sec
sin(
sin
arccos(sin
cos(
))) where φ denotes the position of departure. Specially,
φ
=0 or
φ
=
π
, orientation departure happens,
φ
=
π
/2 or
φ =3 π /2, pitching departure happens. ψ denotes the function with arbitrary precision. Backward
Propagation Neural Network (BPNN) and Radial
Basis Function Neural Network (RBFNN) are always used to approach the corresponding relation from the outputs to the inputs of measurement system. Genetic
Neural Network (GNN) is the result of Genetic
Arithmetic (GA) combining with Neural Network [5] . It departure degree both of orientation departure and pitching departure . η denotes rolling departure degree. overcomes the problem of local least. For the approaching of inverse model, here, a GNN is used.
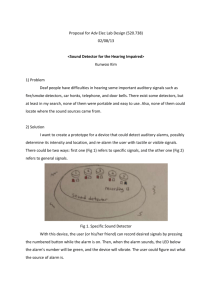
The architecture of NN is shown in Fig.13. In Fig.13,
3 Inverse model
3.1 Input of inverse model
For a four-quadrant photodetector, what one observes are u x
and u y
, but what need to be measured may be the structure parameters or the mounted position of four-quadrant photodetector. If measured
IW denotes the link weight matrix between input layer and hidden layer, b
1
denotes the threshold vector of hidden layer, LW denotes the link weight matrix between hidden layer and output layer, and b
2
denotes the threshold vector of output layer. Tansig function is selected as the transfer functions of hidden layer, and pureline function is selected as the activation functions
5
of output layer. There are four input neurons and four output neurons.
Fig.13 The architecture of the selected model of NN
After built the neural network, set the training performance as 1
10
8 , and train it with 1000 group of samples, obtained from positive model of four-quadrant by altering
ψ
,
φ
,
η and l , for 400 epochs.
A set of samples is made up with a set of input vectors a x
, b x
, c x
, and d x
, and a set of output vectors
ψ
,
φ
,
η
, l , in other words, the errors between the real inputs and the outputs of NN are very little. So the NN can be treated as the inverse model of four-quadrant photodetector.
4 Measurement results
In order to validate the correctness of the model of four-quadrant photodetector, here, f l , one of architecture parameters of four-quadrant photodetector, is measured. The corresponding expected values and the measured results are shown in table 1. From table 1, one finds that the maximal measurement error is only
0.1
dmm , denoted with underline. In other words, both the positive model and the inverse model of four-quadrant are correct and can be used for measurement of structure parameters and the position of four-quadrant photodetector.
Table 1 Measurement result and the corresponding expected value
Expected value ( dmm ) 26.00 26.00 27.00 27.00
Measurement value ( dmm ) 26.06 25.95 26.93 27.01
Expected value ( dmm ) 28.00 28.00 29.00 29.00
Measurement value ( dmm ) 28.10 27.99 29.01 29.08
5. Conclusion
From above discussion and measurement results, following conclusion can be drawn:
(1) For the measurement of f l , the maximal error is only 0.1
dmm . The measurement results show that the measurement precision is high.
(2) The model of four-quadrant photodetector is about the relation between the structure parameters, position and the feature parameters of the outputs of four-quadrant photodetector. So the all the structure parameters and the position of four-quadrant photodetector can be measured using this model.
(3) There are only four feature parameters, and only four measured parameters can be measured using this model.
(4) According to the idea of modeling four-quadrant photodetector, models of other photodetectors, such as three-quadrant photodetector, six-quadrant photodetector, can be constructed in the same method.
References:
[1]E.Huseynov, N.Ismailov, S.R.Samedov, etc,
IR-Detectors Based on IN
2
O
3
-Anode
Oxide-CD x
Hg
1-x
Te, International Journal of Infrared and Millimeter Waves, 23(9), (2002):1337-1345;
[2]K. Hirakawa, S.-W. Lee, Ph. Lelong, etc,
High-sensitivity modulation-doped quantum dot infrared photodetectors, Microelectronic Engineering,
63 (2002) :185–192;
[3]Feng Longling, Simple Analysis of Signal-processing
Skill for Four–quadrant Opto-electronic Detective
System, OPTICAL TECHNOLOGY, (3), 1995:12-17;
[4] Jin Yun, Yuan, Numerical methods for generalized least squares problems, Journal of Computational and Applied Mathematics, 66(1-2), (1996):571-584
[5] Zhang Y, Liu JH, Zhang YH, Tang XJ, Cross
Sensitivity Reduction of Gas Sensor Using Genetic
Neural Network, Optical Engineering, 41(3)
(2002):615-625.
6