CS-404 Analysis & Design of Algorithm [ADA]
advertisement

1
GEC Group of College’s
Dept. of Computer Sc. &Engg. and IT
Teaching Notes
CS/IT – 404
ADA
Prepared by
Mr. Dharmveer Singh bhadauria
2
Analysis & Design of Algorithm(syllabus)
Unit I
Algorithms, Designing algorithms, analyzing algorithms, asymptotic notations, heap and heap sort.
Introduction to divide and conquer technique, analysis, design and comparison of various algorithms
based on this technique, example binary search, merge sort, quick sort, strassen’s matrix
multiplication.
Unit II
Study of Greedy strategy, examples of greedy method like optimal merge patterns, Huffman coding,
minimum spanning trees, knapsack problem, job sequencing with deadlines, single source
shortest path algorithm
Unit III
Concept of dynamic programming, problems based on this approach such as 0/1 knapsack,
multistage graph, reliability design, Floyd-Warshall algorithm
Unit IV
Backtracking concept and its examples like 8 queen’s problem, Hamiltonian cycle, Graph coloring
problem etc. Introduction to branch & bound method, examples of branch and bound method like
traveling salesman problem etc. Meaning of lower bound theory and its use in solving algebraic
problem, introduction to parallel algorithms.
Unit V
Binary search trees, height balanced trees, 2-3 trees, B-trees, basic search and traversal techniques
for trees and graphs (In order, preorder, postorder, DFS, BFS), NP-completeness
3
S.NO
PAGE NO.
NAME OF TOPIC
1
Algorithms, Designing algorithms, analyzing algorithms,
asymptotic notations
4-13
2
Heap and heap sort
14-19
3
Introduction to divide and conquer technique,
20
4
Binary search
21
5
Merge sort
22-29
6
Quick sort
30-35
7
Strassen’s matrix multiplication
36-37
4
Algorithm
• An algorithm is a set of instructions to be followed to solve a
problem.
– There can be more than one solution (more than one
algorithm) to solve a given problem.
– An algorithm can be implemented using different
programming languages on different platforms.
• An algorithm must be correct. It should correctly solve the
problem.
– e.g. For sorting, this means even if
– (1) the input is already sorted, or
– (2) it contains repeated elements.
Once we have a correct algorithm for a problem, we have to
determine the efficiency of that algorithm.
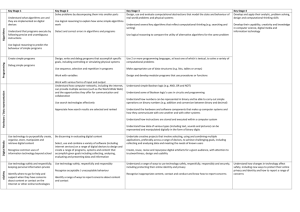
Algorithmic Performance
There are two aspects of algorithmic performance:
• Time
• Instructions take time.
• How fast does the algorithm perform?
• What affects its runtime?
• Space
• Data structures take space
5
• What kind of data structures can be used?
• How does choice of data structure affect the
runtime?
We will focus on time:
– How to estimate the time required for an algorithm.
– How to reduce the time required.
Analysis of Algorithms
• Analysis of Algorithms is the area of computer science that
provides tools to analyze the efficiency of different methods
of solutions.
• How do we compare the time efficiency of two algorithms
that solve the same problem?
Naïve Approach: implement these algorithms in a
programming language (C++), and run them to compare their time
requirements. Comparing the programs (instead of algorithms)
has difficulties.
– How are the algorithms coded?
• Comparing running times means comparing the
implementations.
• We should not compare implementations, because
they are sensitive to programming style that may
cloud the issue of which algorithm is inherently
more efficient.
– What computer should we use?
6
• We should compare the efficiency of the
algorithms independently of a particular computer.
– What data should the program use?
Any analysis must be independent of specific data.
• When we analyze algorithms, we should employ
mathematical
techniques
that
analyze
algorithms
independently of specific implementations, computers, or
data.
• To analyze algorithms:
– First, we start to count the number of significant
operations in a particular solution to assess its
efficiency.
– Then, we will express the efficiency of algorithms using
growth functions.
The Execution Time of Algorithms
• Each operation in an algorithm (or a program) has a cost.
Each operation takes a certain of time.
count = count + 1; take a certain amount of time,
but it is constant
A sequence of operations:
count = count + 1;
Cost: c1
sum = sum + count;
Cost: c2
7
Total Cost = c1 + c2
Example: Simple If-Statement
Cost
if (n < 0)
absval = -n
Times
c1
1
c2
1
c3
1
else
absval = n;
Total Cost <= c1 + max(c2,c3)
Example: Simple Loop
Cost
Times
i = 1;
c1
1
sum = 0;
c2
1
while (i <= n) {
c3
n+1
i = i + 1;
c4
n
sum = sum + i;
c5
n
}
Total Cost = c1 + c2 + (n+1)*c3 + n*c4 + n*c5
The time required for this algorithm is
proportional to n
Example: Nested Loop
8
Cost
Times
i=1;
c1
1
sum = 0;
c2
1
while (i <= n) {
c3
n+1
j=1;
c4
n
while (j <= n) {
c5
n*(n+1)
sum = sum + i;
c6
n*n
j = j + 1;
c7
n*n
}
i = i +1;
c8
}
Total Cost = c1 + c2 + (n+1)*c3 + n*c4 +
n*(n+1)*c5+n*n*c6+n*n*c7+n*c8
The time required for this algorithm is
proportional to n2
n
9
General Rules for Estimation
• Loops: The running time of a loop is at most the running
time of the statements inside of that loop times the number
of iterations.
•
Nested Loops: Running time of a nested loop containing a
statement in the inner most loop is the running time of
statement multiplied by the product of the sized of all loops.
• Consecutive Statements: Just add the running times of
those consecutive statements.
•
If/Else: Never more than the running time of the test plus the
larger of running times of S1 and S2.
Algorithm Growth Rates
• We measure an algorithm’s time requirement as a function
of the problem size.
– Problem size depends on the application: e.g. number
of elements in a list for a sorting algorithm, the number
disks for towers of hanoi.
• So, for instance, we say that (if the problem size is n)
– Algorithm A requires 5*n2 time units to solve a problem
of size n.
– Algorithm B requires 7*n time units to solve a problem
of size n.
10
• The most important thing to learn is how quickly the
algorithm’s time requirement grows as a function of the
problem size.
– Algorithm A requires time proportional to n2.
– Algorithm B requires time proportional to n.
• An algorithm’s proportional time requirement is known as
growth rate.
• We can compare the efficiency of two algorithms by
comparing their growth rates.
Time requirements as a function of the problem size n
11
Common Growth Rates
Function
Growth
Name
c
Constant
log N
Logarithmic
log2N
Log-squared
N
Linear
N log N
N2
Quadratic
N3
Cubic
2N
Exponential
Rate
12
Figure 1.1
Running times for small inputs
Order-of-Magnitude Analysis and Big O Notation
• If Algorithm A requires time proportional to f(n), Algorithm A
is said to be order f(n), and it is denoted as O(f(n)).
• The function f(n) is called the algorithm’s growth-rate
function.
• Since the capital O is used in the notation, this notation is
called the Big O notation.
• If Algorithm A requires time proportional to n2, it is O(n2).
• If Algorithm A requires time proportional to n, it is O(n).
13
Definition of the Order of an Algorithm
Definition:
Algorithm A is order f(n) – denoted as O(f(n)) –
if constants k and n0 exist such that A requires
no more than k*f(n) time units to solve a problem
of size n n0.
• The requirement of n n0 in the definition of O(f(n))
formalizes the notion of sufficiently large problems.
– In general, many values of k and n can satisfy this
definition.
– If an algorithm requires n2–3*n+10 seconds to solve a
problem size n. If constants k and n0 exist such that
–
–
–
–
–
k*n2 > n2–3*n+10 for all n n0 .
the algorithm is order n2 (In fact, k is 3 and n0 is 2)
3*n2 > n2–3*n+10 for all n 2 .
Thus, the algorithm requires no more than k*n2 time
units for n n0 ,
So it is O(n2)
14
What to Analyze
• An algorithm can require different times to solve different
problems of the same size.
– Eg. Searching an item in a list of n elements using
sequential search. Cost: 1,2,...,n
• Worst-Case Analysis –The maximum amount of time that
an algorithm require to solve a problem of size n.
– This gives an upper bound for the time complexity of an
algorithm.
– Normally, we try to find worst-case behavior of an
algorithm.
• Best-Case Analysis –The minimum amount of time that an
algorithm require to solve a problem of size n.
– The best case behavior of an algorithm is NOT so
useful.
• Average-Case Analysis –The average amount of time that
an algorithm require to solve a problem of size n.
– Sometimes, it is difficult to find the average-case
behavior of an algorithm.
– We have to look at all possible data organizations of a
given size n, and their distribution probabilities of these
organizations.
Worst-case analysis is more common than averagecase analysis.
15
What is a “heap
Definitions of heap:
1. A large area of memory from which the programmer
can allocate blocks as needed, and deallocate them (or
allow them to be garbage collected) when no longer
needed.
2. A balanced, left-justified binary tree in which no node
has a value greater than the value in its parent.
These two definitions have little in common.
Heapsort uses the second definition.
The heap property
A node has the heap property if the value in the node is
as large as or larger than the values in its children
All leaf nodes automatically have the heap property
A binary tree is a heap if all nodes in it have the heap
property
16
siftUp
Given a node that does not have the heap property, you
can give it the heap property by exchanging its value
with the value of the larger child.
All leaf nodes automatically have the heap property.
A binary tree is a heap if all nodes in it have the heap
property.
Sorting
What do heaps have to do with sorting an array?
Here’s the neat part:
Because the binary tree is balanced and left justified, it can
be represented as an array
Danger Will Robinson: This representation works well only
with balanced, left-justified binary trees
All our operations on binary trees can be represented as
operations on arrays
To sort:
heapify the array;
while the array isn’t empty {
remove and replace the root;
reheap
the
new
root
node;
}
17
Mapping into an array
18
Removing and replacing the root
19
Reheap and repeat
...And again, remove and replace the root
node
20
Analysis
21
Divide and Conquer
Divide–and-Conquer
is a very common and very powerful algorithm design technique. The
general idea:
1. Divide the complete instance of problem into two (sometimes more)
sub problems that are smaller instances of the original.
2. Solve the sub problems (recursively).
3. Combine the sub problem solutions into a solution to the complete
(original) instance.
While the most common case is that the problem of size n
is divided into 2 sub problems of size n/2 . But in general, we can divide
the problem into b sub problems of size n/b , where a of those sub
problems need to be solved.
A sequential search algorithm
n
i
( n 2 n) / 2
n
n
i 1
22
Binary Search
Binary Search – Analysis
23
Merge Sort Approach
24
Example – n Power of 2
Divide
1
2
3
4
5
6
7
8
5
2
4
7
1
3
2
6
q=4
1
2
3
4
5
6
7
8
5
2
4
7
1
3
2
6
1
2
3
4
5
6
7
8
5
2
4
7
1
3
2
6
1
2
3
4
5
6
7
8
5
2
4
7
1
3
2
6
7
Example – n Power of 2
Conquer
and
Merge
1
2
3
4
5
6
7
8
1
2
2
3
4
5
6
7
1
2
3
4
5
6
7
8
2
4
5
7
1
2
3
6
1
2
3
4
5
6
7
8
2
5
4
7
1
3
2
6
1
2
3
4
5
6
7
8
5
2
4
7
1
3
2
6
8
25
Example – n Not a Power of 2
Conquer
and
Merge
1
2
3
4
5
6
7
8
9
1
2
2
3
4
4
5
6
6
10
1
2
3
4
5
6
7
8
9
1
2
4
4
6
7
2
3
5
1
2
3
4
5
6
7
8
9
2
4
7
1
4
6
3
5
7
1
2
3
4
5
6
7
8
9
4
7
2
1
6
4
3
7
5
1
2
4
5
7
8
4
7
6
1
7
3
11
7
7
10
11
6
7
10
11
2
6
10
11
2
6
10
Merging
p
r
q
1
2
3
4
5
6
7
8
2
4
5
7
1
2
3
6
• Input: Array A and indices p, q, r such that
p ≤q < r
– Subarrays A[p . . q] and A[q + 1 . . r] are sorted
• Output: One single sorted subarray A[p . . r]
11
26
Merging
• Idea for merging:
– Two piles of sorted cards
p
r
q
1
2
3
4
5
6
7
8
2
4
5
7
1
2
3
6
• Choose the smaller of the two top cards
• Remove it and place it in the output pile
– Repeat the process until one pile is empty
– Take the remaining input pile and place it face-down
onto the output pile
A1 A[p, q]
A[p, r]
A2 A[q+1, r]
12
Example: MERGE(A, 9, 12, 16)
14
27
Example (cont.)
15
Example (cont.)
16
28
Example (cont.)
Done!
17
Merge - Pseudocode
Alg.: MERGE(A, p, q, r)
p
1
2
r
q
2
3
4
5
6
7
8
4
5
7
1
2
3
6
1. Compute n1 and n2
2. Copy the first n1 elements into
n1
L[1 . . n1 + 1] and the next n2 elements into R[1 . . n2
p
3. L[n1 + 1] ← ;
R[n2 + 1] ←
4. i ← 1;
j ← 1
L
2
4
5
q+ 1
5. for k ← p to r
R
1
2
3
6.
do if L[ i ] ≤ R[ j ]
7.
then A[k] ← L[ i ]
8.
i ←i + 1
9.
else A[k] ← R[ j ]
10.
j ← j + 1
n2
+ 1]
q
7
r
6
18
29
Running Time of Merge
(assume last for loop)
• Initialization (copying into temporary arrays):
– (n1 + n2) = (n)
• Adding the elements to the final array:
- n iterations, each taking constant time (n)
• Total time for Merge:
– (n)
19
MERGE-SORT Running Time
• Divide:
– compute q as the average of p and r: D(n) = (1)
• Conquer:
– recursively solve 2 subproblems, each of size n/2
2T (n/2)
• Combine:
– MERGE on an n-element subarray takes (n) time
C(n) = (n)
T(n) =
(1)
if n =1
2T(n/2) + (n) if n > 1
21
30
Solve the Recurrence
T(n) =
c
2T(n/2) + cn
if n = 1
if n > 1
Use Master’s Theorem:
Compare n with f(n) = cn
Case 2: T(n) = Θ(nlgn)
22
Merge Sort - Discussion
• Running time insensitive of the input
• Advantages:
– Guaranteed to run in (nlgn)
• Disadvantage
– Requires extra space N
23
31
Quicksort
• Sort an array A[p…r]
A[p…q]
≤ A[q+1…r]
• Divide
– Partition the array A into 2 subarrays A[p..q] and A[q+1..r], such
that each element of A[p..q] is smaller than or equal to each
element in A[q+1..r]
– Need to find index q to partition the array
30
Quicksort
A[p…q]
≤ A[q+1…r]
• Conquer
– Recursively sort A[p..q] and A[q+1..r] using Quicksort
• Combine
– Trivial: the arrays are sorted in place
– No additional work is required to combine them
– The entire array is now sorted
31
32
QUICKSORT
Alg.: QUICKSORT(A, p, r)
Initially: p=1, r=n
if p < r
then q PARTITION(A, p, r)
QUICKSORT (A, p, q)
QUICKSORT (A, q+1, r)
Recurrence:
T(n) = T(q) + T(n – q) + f(n)
PARTITION())
32
Partitioning the Array
• Ch o o s i n g PARTIT ION()
– Ther e ar e dif f er ent ways
– Each has it s own
t o do t his
advant ages/ disadvant a ges
• Ho a re p a rtit i on (see pro b. 7-1 , p ag e 15 9 )
– Select a pivot
elem ent
– G r ows t wo r egions
A[ p…i ] x
x ar ound
which
t o par t it ion
A[ p…i ] x
x A[ j…r]
x A[ j …r]
i
j
33
33
Example
A[p…r]
5
3
2
6
4
pivot x=5
1
3
7
i
5
j
3
3
2
6
4
1
i
5
7
3
2
6
4
1
i
3
3
2
j
3
2
1
i
4
6
5
6
4
1
i
7
3
7
j
3
j
2
5
7
j
A[p…q]
3
3
A[q+1…r]
1
4
j
6
5
7
i
34
Example
35
34
Partitioning the Array
Alg. PARTITION (A, p, r)
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
r
p
x A[p]
5
3
2
6
4
1
3
7
A:
i p – 1
j r + 1
i
j
A[p…q]
≤ A[q+1…r]
while TRUE
ap
ar
do repeat j j – 1
A:
until A[j] ≤ x
j=q i
do repeat i i + 1
until A[i] ≥ x
Each element is
if i < j
visited once!
Running time: (n)
then exchange A[i] A[j]
n = r – p + 1
else return j
36
Recurrence
Alg.: QUICKSORT(A, p, r)
Initially: p=1, r=n
if p < r
then q PARTITION(A, p, r)
QUICKSORT (A, p, q)
QUICKSORT (A, q+1, r)
Recurrence:
T(n) = T(q) + T(n – q) + n
37
35
Worst Case Partitioning
•
Worst-case partitioning
– One region has one element and the other has n – 1 elements
– Maximally unbalanced
•
T(n) = T(1) + T(n – 1) + n,
T(1) = (1)
n
1
Recurrence: q=1
1
n
n- 2
1
n- 2
n- 3
1
T(n) = T(n – 1) + n
=
n
n
n- 1
n- 1
3
2
1
n
n k 1 ( n ) ( n 2 ) ( n 2 )
k 1
1
2
(n2)
When does the worst case happen?
38
Best Case Partitioning
•
Best-case partitioning
– Partitioning produces two regions of size n/2
•
Recurrence: q=n/2
T(n) = 2T(n/2) + (n)
T(n) = (nlgn) (Master theorem)
39
36
Performance of Quicksort
•
Average case
– All permutations of the input numbers are equally likely
– On a random input array, we will have a mix of well balanced
and unbalanced splits
– Good and bad splits are randomly distributed across throughout
the tree
n
combined partitioning cost:
n
2n-1 = (n)
1
n- 1
(n – 1)/2 + 1
(n – 1)/2
(n – 1)/2
Alternate of a good
and a bad split
•
partitioning cost:
n = (n)
(n – 1)/2
Nearly well
balanced split
Running time of Quicksort when levels alternate
between good and bad splits is O(nlgn)
43
37
Strassen's Matrix Multiplication Algorithm
Write a threaded code to multiply two random matrices using
Strassen's Algorithm. The application will generate two matrices
A(M,P) and B(P,N), multiply them together using
(1) a sequential method and then
(2) via Strassen's Algorithm resulting in C(M,N). The application
should then compare the results of the two multiplications to
ensure that the Strassen's results match the sequential
computations.
The input to the application comes from the command line. The
input will be 3 integers describing the sizes of the matrices to be
used: M, N, and P. Code restrictions: A very simple, serial version
of the application, written in C, will be available here. This source
file should be used as a starting point. Your entry should keep the
body of the main function, the matrix generation function, the
sequential multiplication code, and the function to compare the
two matrix product results. Changes needed for implementation in
a different language are permitted. You are also allowed to
change the memory allocation and other code to thread the
Strassen's computations. (It would be a good idea to document
the changes and the reason for such changes in your solution
write-up.) After the needed changes, your submitted solution must
use some form of Strassen's Algorithm to compute the second
matrix multiplication result.
Timing: The time for execution of the Strassen's Algorithm will be
used for scoring. Each
submission should include timing code to measure and print this
time to stdout. If not, the total execution time will be used.
38
Matrix multiplication
Given two matrices AM*P and BP*N, the product of the two is a matrix CM*N which is
computed as
follows:
void seqMatMult(int m, int n, int p, double** A, double** B,
double** C) {
for (int i = 0; i < m; i++)
for (int j = 0; j < n; j++) {
C[i][j] = 0.0;
for (int k = 0; k < p; k++)
C[i][j] += A[i][k] * B[k][j];
}
}
To calculate the matrix product C = AB, Strassen's algorithm partitions the data to
reduce the
number of multiplications performed. This algorithm requires M, N and P to be powers
of 2.
The algorithm is described below.
1. Partition A, B and and C into 4 equal parts:
A=
A11 A12
A21 A22
B=
B11 B12
B21 B22
C=
C11 C12
C21 C22
2. Evaluate the intermediate matrices:
M1 = (A11 + A22) (B11 + B22)
M2 = (A21 + A22) B11
M3 = A11 (B12 – B22)
M4 = A22 (B21 – B11)
M5 = (A11 + A12) B22
M6 = (A21 – A11) (B11 + B12)
M7 = (A12 – A22) (B21 + B22)
3. Construct C using the intermediate matrices:
C11 = M1 + M4 – M5 + M7
C12 = M3 + M5
C21 = M2 + M4
C22 = M1 – M2 + M3