angular velocity of the entire gyroscope
advertisement

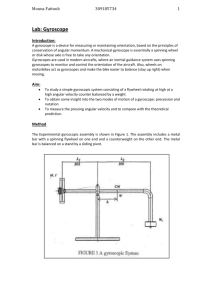
Introduction/Aim: The objectives of this experiment include measuring the angular velocity of the flywheel and how this angular velocity will decay over time and recording the precession (the angular velocity of the entire gyroscope). Also, calculating the Izz (mass moment of inertia of the gyroscope) and comparing this experimental Izz with the theoretical result. A gyroscope is a device for measuring or maintaining orientation, based on the principles of conservation of angular momentum. A mechanical gyroscope is essentially a spinning wheel or disk whose axle is free to take any orientation. Some applications of gyroscopes include navigation, used in airplanes, the stabilization of flying vehicles such as Radio-controlled helicopters. Gyroscopes are also used to maintain direction in tunnel mining due to their higher precision. (http://en.wikipedia.org/wiki/Gyroscope). Method: Experimental Setup: The Experimental gyroscopic assembly is shown in Figure 1. The assembly comprises of a metal bar with a spinning flywheel on one end and a counterweight on the other end. The metal bar is balanced on a stand by a sliding pivot. 1 Method: A. Measure the decay of the angular velocity of the flywheel over time 1. 2. 4. Place a spinning motor in contact with the flywheel to spin it up. Using a stroboscope measure the angular velocity of the flywheel in revolutions per minute. This is done by adjusting the frequency of the stroboscope until a stationary image is visible of the fly wheel. Disengage the spinning motor from the flywheel and in increments of 20 seconds measure the angular velocity of the flywheel until 120 seconds have elapsed. For reliability repeat steps 1 to 3. B. Calculating the Izz (mass moment of inertia of the gyroscope) 1. Locate the centre of mass by sliding the pivot until the bar connecting the flywheel to the counterweight is horizontal. Mark the centre of mass position on the bar. From the centre of mass position, mark out 10mm, 20mm, 30mm, 40 mm and 50mm on both sides of the centre of mass. Place a spinning motor in contact with the flywheel to spin it up. Disengage the spinning motor from the flywheel Place the gyroscope gently onto the stand, balancing it on its centre of mass pivot point, and once it starts to undergo precessional motion, measure the time it takes to complete one revolution using a stop watch. Repeat step 3 to 5 but this time balancing the gyroscope in turns on the positions marked in step 2. 3. 2. 3. 4. 5. 6. Theoretical Background In this report, the axes are defined as: x-axis = into and out of the page, y-axis = left to right on the page, z-axis = up and down on the page. We can obtain a theoretical value for the flywheel’s moment of inertia about the zaxis by treating the flywheel as four concentric rings of different mass. These four areas are shown in figure 2. Applying equation 1, the moment of inertia equation to each of them, and adding these components, the total moment of inertia could be calculated. 1 4 4 𝐼𝑧𝑧,𝑇ℎ𝑒𝑜𝑟. = 2 𝜌𝜋𝑡(𝑟𝑜𝑢𝑡𝑒𝑟 − 𝑟𝑖𝑛𝑛𝑒𝑟 ) Where is the density of the material 7850 kg/m3 t is the thickness of the ring (m) router and rinner are the outer and inner radii of the ring. 2 (1) Area 1: 1 𝐼𝑧𝑧,1 = 2 (7850)𝜋(0.025)(0.074 − 0.0614 ) = 3.133 × 10−3 𝑘𝑔/𝑚2 1 Area 2: 𝐼𝑧𝑧,1 = 2 (7850)𝜋(0.004)(0.0614 − 0.01954 ) = 6.7579 × 10−4 𝑘𝑔/𝑚2 1 Area 3: 𝐼𝑧𝑧,1 = 2 (7850)𝜋(0.0145)(0.01954 − 0.00954 ) = 2.4396 × 10−5 𝑘𝑔/𝑚2 1 Area 4: 𝐼𝑧𝑧,1 = 2 (7850)𝜋(0.0135)(0.0134 − 0.00954 ) = 3.3985 × 10−6 𝑘𝑔/𝑚2 Total Moment of Inertia is 4 𝐼𝑧𝑧,𝑇ℎ𝑒𝑜𝑟. = ∑ 𝐼𝑧𝑧,𝑛 = 3.837 × 10−3 𝑘𝑔/𝑚2 𝑛=1 3 Results: Table 1: The angular velocity, ωs, of the flywheel: ωs (rpm) 1st trial 3000 3000 2800 2600 2500 2430 2300 2200 Time (s) 0 10 30 50 70 90 110 120 ωs (rpm) 2nd trial 3000 2900 2800 2600 2500 2400 2300 2200 Average ωs (rpm) 3000 2950 2800 2600 2500 2415 2300 2200 Average ωs (rad/s) 314.16 308.92 293.22 272.27 261.80 252.90 240.86 230.38 Graph 1 Angular Velocity of the Flywheel 3100 Angular velocity (rpm) 2900 2700 Ns= -6.5528T+ 2988.8 2500 2300 2100 1900 0 20 40 60 80 Time (s) 4 100 120 140 Table 2: The precession, ωp (angular velocity of the entire gyroscope) Length (mm) -50 -40 -30 -20 -10 0 10 20 30 40 50 Time (s) for one revolution about the y-axis 1st trial 4.88 6.32 8.38 13.52 21.24 No precession 22 12 8.14 4.91 3.68 Time (s) for Average time one revolution (s) about the y-axis 2nd trial 5.03 4.96 6.57 6.45 8.46 8.42 12.89 13.21 22.84 22.04 No precession No precession 24 23.00 12 12.00 8.06 8.10 4.84 4.88 4.02 3.85 ωp (rpm) ωp (rad/s) 12.30 9.30 7.13 4.54 2.72 No precession 2.61 5 7.41 12.30 15.58 1.29 0.97 0.75 0.48 0.28 No precession 0.27 0.52 0.78 1.29 1.63 To calculate the moment of inertia of the gyroscope, the following were considered and the result was tabulated in table 3: The mass of the gyroscope was given as 2.5 kg, so the weight (W) was 24.525 N. L = distance of pivot point from centre of mass, with positive L pointing towards the counterweight and negative L pointing away from the counterweight. Ns = angular velocity of flywheel, as measured by stroboscope. The flywheel according to graph 1 would have slowed down according to equation Ns = 2988 – 6.552T by the time when Ns was first recorded and when the revolutions was complete. So Ns is the angular velocity taking into account the decay of the angular velocity T = time for three revolutions of the gyroscope about the stand. 2πNs s = angular velocity of flywheel, converted from r.p.m. using ωs = 60 p = precessional angular velocity of the gyroscope, found using ωp = 2πT 𝑊𝐿 𝐼𝑧𝑧,𝐸𝑥𝑝. = Moment of inertia about the z-axis, found using 𝐼𝑧𝑧,𝐸𝑥𝑝. = 𝜔 𝑠 𝜔𝑝 . This formula comes from equating the moment about the x-axis due to the weight of the system, Mx = WL, and the opposing moment about the x-axis due to the precession of the gyroscope, Mx = Izzsp 5 Table 3: Calculation of Moment of Inertia of the Gyroscope L (mm) Ns (rpm) s (rad/s) T (s) p (rad/s) W.L (N.M) -50 -40 -30 -20 -10 10 20 30 40 50 2956 2946 2933 2901 2844 2837 2909 2935 2956 2963 309.5 308.5 307.1 303.8 297.8 297.1 304.7 307.4 309.6 310.3 4.96 6.45 8.42 13.21 22.04 23.00 12.00 8.10 4.88 3.85 1.29 0.97 0.75 0.48 0.28 0.27 0.52 0.78 1.29 1.63 1.23 0.98 0.74 0.49 0.245 0.245 0.49 0.74 0.98 1.23 Average Izz,Exp. (kg/m2) x 10-3 3.08 3.27 3.36 3.36 2.94 3.05 3.09 3.09 2.45 2.43 3.01 % error Δ𝐼𝑧𝑧,𝑇ℎ𝑒𝑜𝑟. 𝐼𝑧𝑧,𝑒𝑥𝑝. 17.99 11.13 8.15 8.15 23.6 19.15 17.61 17.61 48.33 49.54 20.73 Discussion In the first part of the experiment, the angular velocity and the angular velocity decay of the flywheel was measured and graphed. From the graph it can be seen that the rate of angular velocity decay is a constant and is given by the equation Ns = 2988 – 6.552T. The errors present in these measurements were mainly due to adjusting the stroboscope frequency in time to get a reading within 20 seconds. These errors are based on judgment if the flywheel appears momentary stationary. It would appear that an error of 5% is present; this was obtained from the line of best fit and the variation of the raw data. In the second part of the experiment, the moment of inertia of the gyroscope about the 𝑊𝐿 z-axis was experimentally calculated using 𝐼𝑧𝑧,𝐸𝑥𝑝. = 𝜔 𝜔 to be 3.01 x 10-3 kg/m2; this value 𝑠 𝑝 was lower than the theoretical value of 3.634 x 10-3 kg/m2 by 20.73%. However if we are to disregard the readings at L = 40 and 50 mm because of the large errors they carry compared to the theoretical value, and to the measured values at L = -40 and -50mm (table 3), then the average moment of inertia would be 3.16 x 10-3 kg/m2, which is lower than the theoretical value by 15%. This error although is fairly high, it could be justified because of the different sources of errors that were present during the experiment. The main sources of errors are mainly due to factors which are difficult to assign numerical value to. These errors include: Inaccuracy in judging the time for the completion of one precessional revolution, and the human reaction time to start and stop the stopwatch at a particular point. Possible instrumental error in the stroboscope. The stroboscope was not calibrated so it might have inaccurate readings. Accepting the mass of the gyroscope to be 2.5 kg without actually measuring it. Measurement errors from actually locating the positions of the pivot points and then this error is magnified when slipping can occur while locking the pivot slider into place. Friction between the pivot and the stand can also affect the results, and this friction is increased with greater tilt brought about by large values of L because the pivot will be making more contact with the stand. 6 Nutational motion which is the bobbing up and down of the metal bar as it precesses, can also affect the results when the bar is released from an unstable position such as the case with large offsets in the pivot at large distances from the centre of mass. This experiment could be more reliable if the above errors are minimized. This could be done by more careful measurements and by using data loggers for timing as well as modification to the experimental apparatus (gyroscope) such that the flywheel did not require to be detached and then reattached. Also if time had permitted, the experiment needed to be repeated al least more than three times to get consistency. If these corrections are made than it would be possible to see a greater agreement between theory and experiment Conclusion The two objectives of the experiment were successfully demonstrated, the first was to measure the angular velocity of a flywheel and to show that there is a uniform decay in the angular velocity of the flywheel over time and the second objective was to record the precession (the angular velocity of the entire gyroscope) and to calculate the Izz (mass moment of inertia of the gyroscope) and comparing this experimental Izz with the theoretical result. The comparison was somewhat successful with Izz, experimentally calculated to be 3.16 x 10-3 kg/m2; this value was lower than the theoretical value of 3.634 x 10-3 kg/m2 by 15%. 7