BMEGUI Tutorial 6
advertisement

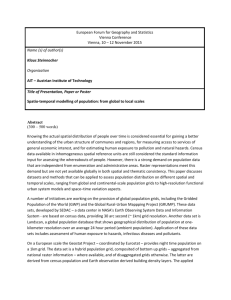
BMEGUI Tutorial 6 Mean trend and covariance modeling 1. Objective Spatial research analysts/modelers may want to remove a global offset (called mean trend in BMEGUI manual and tutorials) from the space/time random field Z(s,t) at spatial location s and time t, and use the detrended (residual) data X(s,t) for the subsequent geostatistical analysis. Consider the following relationship: Z(s,t) = µ(s,t) + X(s,t) (1) where Z(s,t) represents the field of interest, µ(s,t) is a deterministic global offset and X(s,t) is a spatially autocorrelated residual space/time random field. Removing the global offset µ(s,t) from the field Z(s,t) is optional and depends on the choice of the modeler. Once the global offset is removed, the geostatistical analysis is performed on the residual field X(s,t)=Z(s,t)-µ(s,t), which results in estimates of the residual value X(sk,tk) at unsampled point (sk,tk). Before making an actual prediction, the global offset µ(sk,tk) is added back to the residual estimate to obtain the estimate Z(sk,tk)=µ(sk,tk)+X(sk,tk). If the modeler can identify and quantify a meaningful global offset, this global offset explains a portion of the variability of the raw data Z(s), and the residual data are expected to have a lower residual variability, which can result in a more successful geostatistical analysis of the residual field X(s,t). However, there is a real danger of over fitting data when deriving the global offset, which could result in residual data with too little residual autocorrelation to perform a successful geostatistical estimation of the residual field. The global offset can be modeled as a space/time additive separable function of two separate components, i.e. a temporal global offset and a spatial global offset. The degree of smoothness in the space/time global offset can be controlled by applying an exponential filter with user-defined search radius and smoothing range parameters. At this stage the analyst/modeler has the flexibility of choosing a space/time global offset from an infinite number of offsets that spans from an offset with long range variability (i.e. very smooth, and thus pretty uninformative) to an offset with short range variability (i.e. highly variable, and thus very informative). As explained above, a very informative space/time global offset may leave too little autocorrelation in the residual data to conduct a successful geostatistical estimation of the residual field. On the other hand, a flat space/time global offset leaves a high variability in the residuals, which may produce estimates with high posterior variance. Thus, there is a tradeoff between lowering the variability of the residuals while keeping its autocorrelation structure, and hence the modeler should explore a full assortment of global offsets ranging from smooth/uninformative to highly variable/very informative in order to select an ideal compromise that will explain some of the consistent space/time trends in the raw data, while leaving reasonable autocorrelation in the residuals. The primary objective of this tutorial is to perform a mean trend analysis (global mean offset) and remove it from the data to obtain residual data, and then to see the effect of the global offset on the covariance of the residual data. More specifically, this tutorial considers five global offsets with varying degree of smoothness, and explores the effect of each of these global offset on the covariance model parameters (i.e. sill and range) of the corresponding residual data. This tutorial will help you understand the importance of the global offset and its impact on the covariance model of the resulting residual data. 2. Install BMEGUI 3.0.0 See tutorial 1. 3. Data To get the tutorial data, download the data file “data06.csv” from the Tutorial Data Files and save it in a folder called “work06”. Open the data file using a spreadsheet editor or a text editor to see the data available. The original data were downloaded from publicly available online resources and compiled and prepared for this tutorial. 4. BMEGUI Operation i.Start BMEGUI: double click on BMEGUI desktop icon. It will launch BMEGUI window. (See the BMEGUI 3.0.0 user’s manual for more details). ii.Workspace and data file selection: Click on the “Select Working Directory” button on the “data and directory selection BMEGUI screen” and select the ‘work06’ folder. Then click on the “Select Data File” button and select data file ‘data06.csv’ Figure 1: Data and directory selection BMGUI screen iii.Click on the “OK” button. The “Data Field” screen appears after reading the data and setting working directory iv. In the “Data Field Setting” select the following column names from the dropdown menu in each field. X Field: Long Y Field: Lat Time Field: Time_sinceJan1_2007 ID: ID Data Field: PM25 v.In the “Unit/Name” section, input the following units and name of data in each entry box. Space Unit: deg. Time Unit: days Data Unit: ug/m3 Name of Data: PM25 Figure 2: The “Data Field” screen vi.Click on the “Next” button. The “Data Distribution” screen appears vii.Check the basic statistics (mean, standard deviation, coefficient of skewness, and coefficient of kurtosis) of the data and its log-transformed data in the “Statistics” section. viii.Check the histograms of raw data and log-transformed data. By clicking the “Raw Data” and “Log Data” tab in the “Histogram” section, you can switch the histograms Figure 3: The “Data Distribution” screen showing the Histogram of “Raw Data” (upper) and “Log Data” (lower) ix. Since the log-transformed data looks normally distributed, click on the “Use Logtransformed Data” select button at the bottom of the window x.Click on the “Next” button. The “Exploratory Data Analysis” screen appears. At this stage, BMEGUI allows you to perform a temporal and spatial exploratory data analysis. Figure 4: “Exploratory Data Analysis” screen xi.Click on the “Temporal Evolution” tab. Change the “Station ID” and see the corresponding temporal distribution of the data xii.Click on the “Spatial Distribution” tab. Change the “Time” and see the corresponding spatial distribution of the data xiii.Click on the “Next” button. The “Mean Trend Analysis” screen appears NOTE: We will fit mean trend (global offset) models with 5 different levels of smoothness (case1, case2, case3, case4, and case5) with level of smoothness ranging from smooth (uninformative trend model) to variable (informative trend model) Case1: xiv.Click on the “Model mean trend and remove it from data” button to plot the mean trend in the temporal and spatial domains xv. Here we want to fit a global offset with long range variability that will result in a very flat mean trend (i.e. a nearly constant global offset). To get a flat mean trend, we have to enter large values for the search radius and smoothing range parameters of the exponential filter. Enter the following parameter values, and click on the “Recalculate Mean Trend” button Search Radius Spatial Temporal 15 1000 Figure 1(a): The “Mean Trend Analysis” screen Smoothing Range 15 1000 Figure 2(b): The “Mean Trend Analysis” screen In the figure 4, we can see that the temporal and spatial mean trends (global offsets) are extremely smooth and look like flat mean trends. BMEGUI will remove this flat mean trend from the data to obtain the residual (detrended) data. xvi.Click on the “Next” button. The “Space/Time Covariance Analysis” screen appears. At this step BMEGUI calculates and plots experimental covariance valuesusing the residual data. xvii. We can manually edit temporal and spatial lags and their corresponding lag tolerances to obtain more pairs of experimental covariance values (red dots) if needed. Here we will only edit the temporal lags and their lag tolerances. To edit the temporal lags, please click on the “Temporal Component” tab, and then click on the “Edit Temporal Lags…” button. A dialog box with default lags appears. Enter the following values in the “Temporal Lag” and “Temporal Lag Tolerance” fields of the dialog box. Temporal Lag: 0.0,20.0,40.0,68.3333333333,136.666666667,205.0,273.333333333,341.6666666 67,410.0,478.333333333,546.666666667,615.0,683.333333333 Temporal Lag Tolerance: 0.0,10,20.0,34.1666666667,34.1666666667,34.1666666667,34.1666666667,34.16 66666667,34.1666666667,34.1666666667,34.1666666667,34.1666666667,34.166 6666667 xviii.Click on the “OK” button. The experimental covariance plot (shown in red dots) is automatically updated based on the entered temporal lags and corresponding tolerances. Figure 3: The “Space/Time Covariance Analysis” screen, showing Spatial and Temporal Components of the covariance xix.Now, we can model a covariance model that fits all experimental covariance values (red dots) as best as possible. We will fit a two-structures covariance model to ensure a good fit with the experimental covariance values. To fit a two-structures covariance model, enter 2 in the “Number of covariance structure(1-4)” xx. Now we have to enter covariance model parameters for each of the two covariance structures. Input the following model parameters Structure 1: Sill: 0.2 Spatial Model: exponentialC Spatial Range: 4 Temporal Model: exponentialC Temporal Range: 7 Sill: 0.19 Spatial Model: exponentialC Spatial Range: 100 Temporal Model: exponentialC Temporal Range: 75 Structure 2: xxi.Click on the “Plot Model” button. A plot of covariance model is superimposed on the experimental covariance values. Figure 4: The covariance model, shown on the Spatial Component (upper) and Temporal Component (lower) plot xxii.Click on the “Temporal Distribution” tab. To obtain the time series of BME estimates at Station “43”, set the following estimation parameters in the “New Plot” section BME Parameters: Use default settings Estimation Parameters: Station ID:43 Estimation Period: 1.0 days to 10.0 Display Parameter: Use default setting xxiii.Click on the “Estimate” button. A new tab labeled “Plot ID: 0001” appears, and a new entry appears on the list in the “Plot List” section. Figure 5: The “BME Estimation” screen xxiv.Click on the “Plot ID: 0001” tab and check the map of BME estimates. Figure 6: Time series of BME estimates xxv.Click on the “Quit” button to close the screen. A dialog box appears. Click on the “OK” button of that dialog box to confirm that you want to quit BMEGUI. Case 2: Repeat Steps i through xiv xxvi.To obtain the mean trend using new parameters, input the following parameter values, and click on the “Recalculate Mean Trend” button Spatial Temporal Search Radius 0.001 0.1 Figure 7(a): The “Mean Trend Analysis” screen Smoothing Range 0.001 0.1 Figure 8(b): The “Mean Trend Analysis” screen xxvii.Click on the “Next” button. The “Space/Time Covariance Analysis” screen appears. xxviii.Click on the “Temporal Component” tab, then on the “Edit Temporal Lags…” button. A dialog box appears. xxix.Input the following values in the “Temporal Lag” and “Temporal Lag Tolerance” fields of the dialog box. Temporal Lag: 0.0,20.0,40.0,68.3333333333,136.666666667,205.0,273.333333333,341.666666667,4 10.0,478.333333333,546.666666667,615.0,683.333333333 Temporal Lag Tolerance: 0.0,10,20.0,34.1666666667,34.1666666667,34.1666666667,34.1666666667,34.16666 66667,34.1666666667,34.1666666667,34.1666666667,34.1666666667,34.166666666 7 xxx.Click on the “OK” button. The experimental covariance plot (shown in red dots) is automatically updated. Figure 9: The “Space/Time Covariance Analysis” screen, showing Spatial and Temporal Components of the covariance xxxi.Enter 2 in “Number of covariance structure(1-4)” xxxii.Input the following model parameters Structure 1: Sill: 0.05 Spatial Model: exponentialC Spatial Range: 1.5 Temporal Model: exponentialC Temporal Range: 5 Sill: 0.0619 Spatial Model: exponentialC Spatial Range: 3 Temporal Model: exponentialC Temporal Range: 25 Structure 2: xxxiii.Click on the “Plot Model” button. A plot of covariance model is superimposed on the experimental covariance values. Figure 10: The covariance model, shown on the Spatial Component (upper) and Temporal Component (lower) plot Case 3: Repeat all Steps in case 2 with following changes xxvii. To obtain the mean trend using new parameters, input the following parameter values, and click on the “Recalculate Mean Trend” button Search Radius Spatial Temporal xxviii. 1 60 Input the following model parameters Structure 1: Sill: 0.18 Spatial Model: exponentialC Spatial Range: 3.9 Temporal Model: exponentialC Temporal Range: 2 Sill: 0.153 Spatial Model: exponentialC Spatial Range: 95 Temporal Model: exponentialC Temporal Range: 30 Structure 2: Smoothing Range 1 60 Case 4: Repeat all Steps in case 2 with following changes xxix. To obtain the mean trend using new parameters, input the following parameter values, and click on the “Recalculate Mean Trend” button Search Radius Spatial Temporal xxx. 0.2 10 Input the following model parameters Structure 1: Sill: 0.157 Spatial Model: exponentialC Spatial Range: 3.7 Temporal Model: exponentialC Temporal Range: 2 Sill: 0.13 Spatial Model: exponentialC Spatial Range: 85 Temporal Model: exponentialC Temporal Range: 20 Structure 2: Smoothing Range 0.2 10 Case 5: Repeat all Steps in case 2 with following changes xxxi. To obtain the mean trend using new parameters, input the following parameter values, and click on the “Recalculate Mean Trend” button Search Radius Spatial Temporal xxxii. 0.1 5 Input the following model parameters Structure 1: Sill: 0.11 Spatial Model: exponentialC Spatial Range: 3 Temporal Model: exponentialC Temporal Range: 2 Sill: 0.1312 Spatial Model: exponentialC Spatial Range: 30 Temporal Model: exponentialC Temporal Range: 15 Structure 2: Smoothing Range 0.1 5 The analysis carried out above in BMEGUI can be summarized using the tables shown below Table 1: Smoothing parameters used to obtain the 5 different global offset models. The search radius is set to the same value as the smoothing range. Case 1 and case 2 are two extremes of smoothness in the global offset and are tabulated in the first and last rows. Spatial Component Temporal Component case 1 3 4 5 Search radius (deg.) 15 1 0.2 0.1 Smoothing range (deg.) 15 1 0.2 0.1 Search radius (days) 1000 60 10 5 Smoothing range (days) 1000 60 10 5 2 0.001 0.001 0.1 0.1 Table 2 Fitted covariance model parameters (sill and autocorrelation range) for each global offset model. case 1 3 4 5 2 Sill 0.2 0.18 0.157 0.11 0.05 Structure 1 Spatial range (deg.) 4 3.9 3.7 3 1.5 Temporal range (days) 7 2 2 2 5 Sill 0.19 0.153 0.13 0.132 0.0619 Structure 2 Spatial range (deg.) 100 95 85 30 3 Temporal range (days) 75 30 20 15 25 After careful analysis of table 1 and table 2 it can be observed that as we increase the smoothness in the mean trend (the global offset) we observe changes in the experimental covariance. An extremely smoothed (i.e. flat and uninformative) mean trend results in higher residual variance and larger spatial and temporal autocorrelation ranges. On the other hand, decreased smoothness in the mean trend results in smaller residual variance but also shorter spatial and temporal autocorrelation ranges. Ideally, we seek large spatial and temporal autocorrelation range but low variance for the residuals. In order to see how the autocorrelation range and the residual variance change for each mean trend model, we calculate for each mean trend model (case 1 to 5) the residual variance as the sum of the two covariance sills, as well as the variance weighted spatial range, and the variance weighted covariance range. Each mean trend model is then represented as a circle in the following plot: 60 variance weighted range 50 spatial component temporal component mean spatial and tempooral components 40 30 20 10 0 0.1 0.15 0.2 0.25 0.3 variance 0.35 0.4 0.45 The mean trend model obtained in case 1 had the maximum smoothness (i.e. it is flat) and it therefore had the largest residual variance. This mean trend model is therefore represented by the circles with the highest residual variance. On the other hand the mean trend obtained in case 2 had the smallest smoothness, and it therefore had the smallest residual variance. This mean trend model is therefore represented by the circle with the lowest residual variance. Cases 3-5 have residual variances that are in between the case 1 and 2 which are extremes of smoothness. As can be seen from the plot, each mean trend model represents a tradeoff between residual variance and covariance range. As we start from the smoothest mean trend model (with the highest residual variance) and we decrease the mean trend smoothest (i.e. we are moving toward low residual variance), we see that the covariance range decreases. This represents a tradeoff. The optimal level of smoothness in mean trend is the breakpoint where further decrease in smoothness results a drastic decreases in autocorrelation range. This point is shown in green in the plot. Conclusion: The degree of smoothness in the space/time global offset can be controlled by the search radius and smoothing range parameters. A very informative space/time global offset leaves too little autocorrelation in the residuals to conduct a successful geostatistical analysis of the residual field. On the other hand, a flat space/time global offset leaves a large variability in the residuals which produces a covariance model with high variance. Thus, there is a tradeoff between residual variability and autocorrelation range, and hence one should choose a space/time global offset which capture some variability in data and leaves reasonable autocorrelation in the residuals to conduct a successful geostatistical analysis of the residual field.