lab_7_burke_randall_weaver
advertisement

LAB #7: UAV Aerodynamic Performance
Zak Weaver
Darrell Randall
Tyler Burke
11/16/2012
Dr. Jim Gregory
Friday 1:50-3:40
Introduction
The objective of this lab is to evaluate the performance of a small reconnaissance UAV. The
primary question trying to be answered is at what velocity must the UAV be flown to achieve
maximum range?
Our data will be obtained using XFLR5 to evaluate various aspects of the Dragon Eye UAV.
This data will be compared to experimental data from previous tests.
Procedure
The first step is to put information about the Dragon Eye UAV into XFLR5. Data from the
Liebeck LA2573A airfoil must be obtained and loaded into the program. After analyzing the 2D
airfoil it must be turned into a 3D model of the entire wingspan. Next this 3D model should be
put through an analysis at a freestream velocity of 40 mph over angles of attack from -2 to 20.
The results can be viewed interactively using the program itself, or displayed in a table by
exporting current polar data.
Analysis and Reporting
1.
Q1a. Cp distribution across the wing is highest in the center of the airfoil and gradually
tapers when you get close to the wing tips. Lift also follows this same trend. These are altered
from 2D conditions by showing the effects the entire wing has on Cp and lift instead of a cross
section of it. This causes a different distribution for Cp and lift for different parts of the wing.
Q1b. Downwash increases as angle of attack increases. Downwash near the wing tips increases
at a higher rate than down wash in the middle because of stronger wingtip vortices at high angles
of attack.
Q1c. As angle of attack increases transition location on the top of the wing stays roughly the
same while on the bottom the transition will start to move back on the wing gradually, starting
from the center. Because of this induced drag becomes gradually larger in the center of the
wingspan.
Q1d. The highest panel force is located at .25c and at half the wingspan.
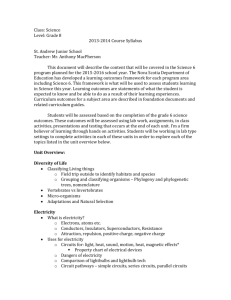
Lift for the wing is shown below for various angles of attack..
Lift Curve
1.2
1
0.8
L
0.6
C
2.
0.4
0.2
0
Computational
Experimental
-0.2
-2
0
2
4
6
8
10
12
14
16
Plot 1. Shows Cl vs α for computational and experimental data
18
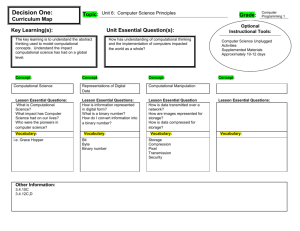
The drag polar was calculated and graphed for experimental and computational data
Drag Polar
1.2
1
0.8
C
L
0.6
0.4
0.2
0
Computational
Experimental
-0.2
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
CD
Plot 2. Drag Polar for experimental and computational data
0.18
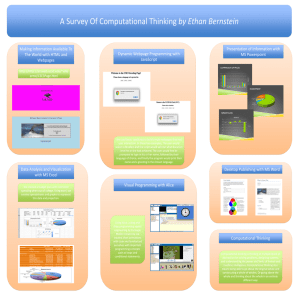
L/D was found and graphed for various angles of attack
Lift-to-Drag Ratio
15
L/D
10
5
0
Computational
Experimental
-5
-2
0
2
4
6
8
10
12
14
16
18
Plot 3. Compares experimental and computational L/D vs α
In general the shape is nearly identical for each graph. The main difference is magnitude. In
ideal computational conditions it is possible to get the data obtained from XFLR5, but in reality
the experimental results are received. This can be because of disturbances on the airfoil, or a
changing temperature or anything that cannot be absolutely controlled.
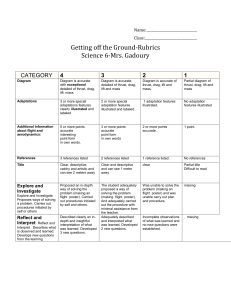
3.
To Estimate the coefficient of drag of the fuselage of the UAV, the computational data
must be fit to the experimental data as closely as possible. To do this, we chose a value of 0.02.
Unfortunately, the curves for experimental and computational have very different shapes so it is
impossible to get an exact value for the drag on the fuselage, but 0.02 is a nice average of the
values.
Drag Polar with Fixed Computational CD
1.2
1
0.8
C
L
0.6
0.4
0.2
0
-0.2
0.02
0.04
0.06
0.08
0.1
CD
0.12
0.14
0.16
0.18
Plot 4. This shows drag polar with fixed CD from fuselage
4.
Various values from both data sets are shown below.
CLα
Computational
Experimental
CD0
0.0618
0.0469
CDmin
αL=0
CLmax
(L/D)max
0.0170 0.0168
-0.5856
1.0827
14.4306
0.0262 0.0251
-0.5622
0.8280
9.6100
Table 1. Shows the values of various key points on the lift curve and drag polar.
5.
The span efficiency factor was determined using the equation
1
𝑒= ″
𝑘 πAR + 1 + δ
The value for 𝑘 ″ was estimated to be 0.01 given the usual range of 0.009-0.012. The value of δ
was given to be 3.75 as read from the chart for an aircraft with a taper ratio of 1.0 and an AR of
3.75. Plugging these values into the equation, the span efficiency factor was found to be 0.8656.
6.
The aircraft will achieve maximum range when the ratio of lift-to-drag is at its maximum.
At the point of (L/D)max the aircraft is the most efficient and thus can achieve maximum range.
The equation for velocity at (L/D)max is:
𝑉𝐿⁄
𝐷𝑚𝑎𝑥
= √𝜌
2∗𝑤
∞ ∗𝑠∗𝐶𝐿
The CL in this case is the CL at (L/D)max which is .4209.
𝑉𝐿⁄
𝐷𝑚𝑎𝑥
2∗6
= √.0023769∗3.75∗.4209 = 56.56 ft/s
7.
The stall speed of the aircraft will occur at the maximum lift coefficient C Lmax. Looking at
the experimental data for the UAV the maximum lift coefficient is 1.0827. Using the equation
𝑉𝑠𝑡𝑎𝑙𝑙 = √𝜌
for stall speed:
2∗𝑤
∞ ∗𝑠∗𝐶𝐿 𝑚𝑎𝑥
Where w is the weight of the UAV (6 pounds), ρ∞ is the density (.0023769 slug/ft3) and s is the
wing area (3.75 ft2).
2∗6
𝑉𝑠𝑡𝑎𝑙𝑙 = √.0023769∗3.75∗1.0827 = 35.26 ft/s
8.
Plot 5. Shows the power available compared to the power required to fly at speeds at sea level
and 10,000 feet.
Both power required curves follow the same trend, an increase in velocity means an increase in
the thrust required. This is true because to maintain steady level flight thrust is equal to drag and
as velocity increases drag increases. Thus to maintain steady level flight thrust must also
increase. The point at which the thrust required lines intersect the thrust available indicates there
is no more thrust available from the engine. This intersection indicates the maximum speed the
aircraft can fly at each altitude. The maximum speed the UAV can fly at sea level is 141.71 ft/s
and 163.72 ft/s at 10,000 feet.
Appendix A
close all; clear ;clc
%Read in variables from xls file for experimental portion
Aexper=xlsread('Lab7.xlsx','A3:A21');
C_Lexper=xlsread('Lab7.xlsx','B3:B21');
C_Dexper=xlsread('Lab7.xlsx','C3:C21');
%Read computational data
ComputationalData=importdata('Lab7computationalData.txt');
Comped=ComputationalData.data;
Acomp=Comped(:,1);
C_Lcomp=Comped(:,2);
IC_dcomp=Comped(:,3);
PC_dcomp=Comped(:,4);
%Sum the drag components for capital D drag.
C_Dcomp=IC_dcomp+PC_dcomp;
%Plotting fun for lift vs. drag
figure(1)
plot(C_Dcomp,C_Lcomp,C_Dexper,C_Lexper)
ylabel('C_L'); xlabel('C_D'); title('Drag Polar')
legend('Computational','Experimental',4); grid on
%Plottin the lift curve woot woot
figure(2)
plot(Acomp,C_Lcomp,Aexper,C_Lexper)
ylabel('C_L'); xlabel('\alpha'); title('Lift Curve')
legend('Computational','Experimental',4); grid on
%One more graph! One more graph! Let's go L/D!
LDcomp=C_Lcomp./C_Dcomp;
LDexper=C_Lexper./C_Dexper;
figure(3)
plot(Acomp,LDcomp,Aexper,LDexper)
ylabel('L/D'); xlabel('\alpha'); title('Lift-to-Drag Ratio')
legend('Computational','Experimental',4); grid on
%Estimating the drag coefficient of the fuselage
%I'll do that later...
%Done!
C_Dfuse=C_Dcomp+0.02;
figure(4)
plot(C_Dfuse,C_Lcomp,C_Dexper,C_Lexper); grid on
xlabel('C_D'); ylabel('C_L'); title('Drag Polar with Fixed Computational
C_D')
%Alright now for analysis question 4!!
%Compute the lift curve slope
LCSC=diff(C_Lcomp); AverageLCSC=mean(LCSC)
LCSE=diff(C_Lexper); AverageLCSE=mean(LCSE)
%Calculate parasite drag coefficient at 0 lift
for r=1:length(C_Lcomp)-1
if(C_Lcomp(r)<0)
if(C_Lcomp(r+1))
C_D0C=((0-C_Lcomp(r))/(C_Lcomp(r+1)-C_Lcomp(r)))*(C_Dcomp(r+1)C_Dcomp(r))+C_Dcomp(r);
end; end; end; C_D0C
for r=1:length(C_Lexper)-1
if(C_Lexper(r)<0)
if(C_Lexper(r+1))
C_D0E=((0-C_Lexper(r))/(C_Lexper(r+1)C_Lexper(r)))*(C_Dexper(r+1)-C_Dexper(r))+C_Dexper(r);
end; end; end; C_D0E
%Calculate C_D minimum
C_Dmincomp=min(C_Dcomp)
C_Dminexper=min(C_Dexper)
%Calculate \alpha at 0 lift
%Computational
for r=1:length(C_Lcomp)-1
if(C_Lcomp(r)<0)
if(C_Lcomp(r+1)>0) % Linear Interpolation
A0comp=((0-C_Lcomp(r))/(C_Lcomp(r+1)-C_Lcomp(r)))*(Acomp(r+1)Acomp(r))+Acomp(r)
end; end; end
%Experimental
for r=1:length(C_Lexper)-1
if(C_Lexper(r)<0)
if(C_Lexper(r+1)>0) % Linear Interpolation
A0exper=((0-C_Lexper(r))/(C_Lexper(r+1)C_Lexper(r)))*(Aexper(r+1)-Aexper(r))+Aexper(r)
end; end; end
%Calculate C_L maximum
C_Lmaxcomp=max(C_Lcomp)
C_Lmaxexper=max(C_Lexper)
%Calculate (L/D) maximum
LDmaxcomp=max(LDcomp)
LDmaxexper=max(LDexper)
%Determining the span efficiency factor of the wing.
k2=0.01; AR=3.75; delt=0.0375;
e=1/(k2*pi*AR+1+delt)
clc
v=(0:.1:200);
TA=1.5;
rho_sl=.0023769;
rho_100000=.0017556;
s=3.75;
CDo=.0170;
TR_sl=.5*rho_sl.*v.^2.*s*CDo;
TR_10000=.5*rho_100000.*v.^2.*s*CDo;
plot(v,TA,v,TR_sl,'g',v,TR_10000,'r')
title('Power Avaliable vs. Power Required')
xlabel('Velocity (ft/s)')
ylabel('Thrust (lbs)')
legend('Power Avaliable','Power Required (sea level)','Power Required (10,000
ft)',-1)
f_sl=@(v).5*rho_sl.*v.^2.*s*CDo-TA;
fzero(f_sl,80)
f_10000=@(v).5*rho_100000.*v.^2.*s*CDo-TA;
fzero(f_10000,95)