grl53212-sup-0001-Supplementary
advertisement

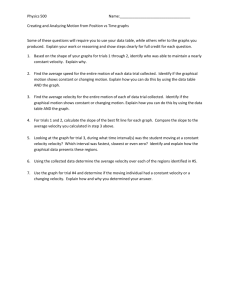
[Geophysical Research Letters] Supporting Information for [Fragmentation and boosting of rock falls and rock avalanches] [Fabio Vittorio De Blasio and Giovanni Battista Crosta] [Department of Earth and Environmental Sciences, University of Milano Bicocca, Piazza della Scienza 4, Milan, Italy] Contents of this file Text S1 to S7 Figures S1 to S3 Introduction In this supplementary material, some details are added to clarify general conditions, present some published data from the literature, and derive most relevant equations. Text S1. Selected profiles of rock avalanches slope path. In the whole work, we concentrate on the case in which the slope path is approximated with one single, sudden change of otherwise smooth slope (a kink), rather than continuously varying ground. A simplification of the geometry is needed, considering the complexity of fragmentation phenomena. However, this kink geometry in which, after travelling on a relatively smooth rock slope, the travelling rocks meet a horizontal plain at high speed is actually commonplace for many rock avalanches, rockfall, and snow avalanches. Figure 1S shows that this topography is typical in the Rocky Mountains and the Alps. This geometry can become particularly evident for rock falls-avalanches originated from high rock walls (e.g., Yosemite valley, chalk cliffs, Dolomites). 1 Figure S1. Selected profiles of some chosen rock avalanches from the literature. They are represented on two different plots to evidence the different morphologies. All the data are in scale with height related to a common zero elevation. Single or multiple slope breaks and flat terminal path sectors are common. Text S2. Calculation details of the Distinct Element model. Here, we give a few details of the Distinct Element model that resulted in Figs. 1 and 2. In this model, each disk labelled with i (henceforth also called block) is subject to a force 𝑻𝒊 (𝒙𝒊 − 𝒙𝒋 ) due to the influence of the block j given as 𝑻𝑖 (𝒙𝑖 − 𝒙𝑗 ) = 𝑹𝑖 (𝒙𝑖 − 𝒙𝑗 ) + 𝑪𝑖 (𝒙𝑖 − 𝒙𝑗 ) + 𝑫𝑖 (𝒙𝑖 − 𝒙𝑗 ) (1) where xi, xj are the positions of the blocks centers, and symbols in boldface indicate vectors. The total force acting on i results from three elementary forces: force Ri (xi-xj ) simulating a repulsion (linear as a function of the penetration) when blocks interpenetrate; Coulomb shear force Ci (xi-xj ) resulting from friction, and finally a dissipative force Di (xi-xj ) accounting for inelasticity of the collisions, corresponding to an imposed coefficient of restitution. The relatively small value adopted in the simulations appears appropriate considering the high impact velocity, which is known to decrease 2 dramatically the coefficient of restitution (e.g. Pfeiffer and Bowen, 1989). Anyway, it is clear that the assumption of a constant value is a strong but necessary approximation. In principle, it is possible to introduce an attractive force simulating cohesion but this is not done here, where the granular assemblage is assumed to be non-cohesive. Another force Fi (xi ) accounts for the interaction with the terrain and appears only when the particle becomes sufficiently close to the terrain. This is the sum between a repulsive force (which accounts for bouncing) and a frictional term (De Blasio, 2012). Then the acceleration of the block is 𝒅𝟐 𝒙𝒊 /𝒅𝒕𝟐 = 𝒈 + 𝑭𝒊 (𝒙𝒊 ) 𝑴 𝟏 + 𝑴 ∑𝒋≠𝒊 𝑻𝒊 (𝒙𝒊 − 𝒙𝒋 ) (2) where M is the block mass and g is gravity acceleration. A block will break when its internal stresses exceed a stress limit so that cracks can propagate at high speed (e.g., Rhodes, 1998). For at least two reasons, this is a very complicated process for real blocks. Firstly, real rocky blocks present irregular flaws varying as a function of the block size. Because it is the stress activation that nucleates the cracks causing fragmentation, if follows that blocks will break differently (i.e in a different number of fragments, of different size, along planes of different size and orientation) and at different loads. Secondly, the stress distribution itself even for a perfectly shaped loaded disk is extremely irregular. Also for this reason, stresses are often calculated as ensemble averages in numerical modelling (Thornton, 2000). Here, we emphasize the interest for the location along the slope profile where maximum stress occurs. On the other hand, we are interested only on the order-of-magnitude of the stress needed to break a block, rather than on the exact value needed for fragmentation. For this reason, we will be considering an average stress (obtained from the impulsive force divided by an effective block area) without resort to more sophisticated studies of stress distribution (e.g. Thornton, 2000). A proxy for the stress acting on disk i is so ⃗⃗⃗𝒊 )|/(𝟐𝑹𝑻) 𝝈𝒊 = ∑𝒋≠𝒊|𝑻𝒊 (𝒙𝒊 − 𝒙𝒋 ) + ⃗⃗⃗ 𝑭𝒊 (𝒙 (3) where R is the block radius and T is the thickness of the disk (R=T=2 m have been used in the present calculations). Text S3. Post-impact versus pre-impact velocity Bowman et al. (2012) have investigated the post-impact velocity of clasts in experiments with a centrifuge using a bilinear geometry. They showed that the postimpact clast velocities are linked to the pre-impact velocity of the coal block used for the experiments (note that velocities are large due to the increased gravity obtained with the centrifuge). Below, we create a new plot from their published data (Figs. 15a and 15b in Bowman et al., 2012) showing the post-impact velocity as a function of the pre-impact velocity. The dispersion in their data is associated to the different tested conditions (imposed acceleration: 30g and 50g; slope angle: 60° and 70°; initial conditions of the material: loose or in different number of solid blocks; different basal surface material: wood or steel). Based on our model (Eqs. 5 of the main text) we deduce that the greater post-impact energy is carried by the smaller clasts, which is evident also in the postimpact images by Bowman et al. (2012). 3 Note that even the simple block model expressed by Eq. 4 and 5 exhibits a longitudinal dispersion of fragments. The difference between the runout of the faster clast 2 and the one of the slower clast 1 (a proxy of the stretching length following fragmentation) can be calculated from Eq. (5) as 𝑅2 − 𝑅1 = (𝑈 2 2 − 𝑈 21 )/(2µ𝑔) = 𝑈 2 [𝐾 2 + 2𝐾] /(2µ𝑔) (4) where 𝑀 2𝑓 K= √𝑀 (𝑡𝑎𝑛2 𝛽 − 𝑀𝑈 2 ) 2 (5) and µ is the friction coefficient. Thus, this model system shows a dispersion increasing with the ratio of the mass between the total mass M and the smallest clast M2. If more clasts are produced, fragments would be distributed much more evenly along the horizontal plane compared with the case of non-fragmenting block. Extended to a rock avalanche, this would result in the stretching of the deposit. Figure S2. Post-impact velocity of the broken artificial avalanche versus pre-impact velocity (in m s-1) of the incoming block. Data are extracted from Bowman et al. (2012) and derive from centrifuge experiments performed under different conditions (i.e. nominal g level, slope angle, initial degree of material subdivision/fragmentation, released mass, runout base plate material). Text S4. Derivation of Eq. (7) As stated in the main article, the integral leading to Eq. (7) should be carried out dividing the angle sectors in the situation like for fragment “1” (between γ =0 to γ =π-β, from γ =π-β and 3π/2, and from 3π/2 and 2π in which the momentum along x is simply v 4 cos γ), and the one for fragment “2”, or between π-β and 3π/2 with a more involved construction (Fig. 7). Here, γ is the angle between the positive x direction and the velocity vector of the fragment. The integral is split in three parts for the three angle ranges of the velocity vector. The following figure shows the three cases. The contribution of the velocity vector along the x direction in the three cases is 𝜋−𝛽 A) ∫0 cos 𝛾 𝑑 𝛾 3 ( )𝜋 2 B) ∫𝜋−𝛽 𝑓(𝛾) 𝑑 𝛾 (4) 2𝜋 C) ∫3𝜋 cos 𝛾 𝑑 𝛾 2 where 𝑓(𝛾) = 𝑐𝑜𝑠𝛾 − 𝑠𝑖𝑛2 𝛽 𝑐𝑜𝑠𝛾 − 𝑠𝑖𝑛𝛽 𝑐𝑜𝑠𝛽 𝑠𝑖𝑛𝛾 is calculated with the procedure shown the next figure. First, the vector is decomposed between the component normal, and that parallel to the slope. 𝑓(𝛾) gives the projection of the “parallel component” along the positive x. Evidently, the first term 𝑐𝑜𝑠𝛾 in 𝑓(𝛾) sums up with identical terms for the other quadrants so that the sum A+B+C becomes ⟨𝑣⟩ = 𝑣 2𝜋 𝑣 3 ( )𝜋 2 [𝑠𝑖𝑛2 𝛽 𝑐𝑜𝑠𝛾 − 𝑠𝑖𝑛𝛽 𝑐𝑜𝑠𝛽 𝑠𝑖𝑛𝛾] 𝑑 𝛾 ∫ 𝑐𝑜𝑠𝛾 𝑑 𝛾 − 2𝜋 ∫𝜋−𝛽 2𝜋 0 (5). Whereas the first of the two integrals gives a zero result, the second integral in (5) yields ⟨𝑣⟩ = 𝑣 2𝜋 [𝑠𝑖𝑛2 𝛽 + 𝑠𝑖𝑛𝛽] (6) We thus find that the ratio between the momentum increase and the momentum Px = MUx of the landslide prior to impact, where Ux = U cos β is the velocity along x of the center of mass at the moment of impact against the flat terrain, is 3 /2 2 Px mNv 1 cos d f ( ) d cos d Px M U x 2 0 3 /2 M v 1 1 sin 1 sin F 2 M Ux (7) 2 where f ( ) cos sin cos sin cos sin . 5 Figure S3. Examples of velocity vectors of broken clasts participating to the integrals A, B, and C. A1, A2, B1, B2, C1 are examples of velocity vectors having the orientation angles such that they contribute to the integrals A, B, or C in Eqs. (4). While in cases A and C the vector contributing to the horizontal momentum is simply taken as the horizontal velocity component, in the case B the construction is more involved. Firstly, the components parallel and perpendicular to the inclined terrain are taken (D). The horizontal projection of the parallel component gives a first contribution to the horizontal boost (in this case, clearly, a negative contribution). The normal component is reversed with a certain coefficient of restitution, and finally the horizontal component is taken as well. Text S4. Example of calculation of the integrals like in Eq. (9) The integrals such as the ones in Eq. (9) of the main text are of the form 𝐶 𝐼 = ∫ 𝑓(𝑚)𝑣(𝑚)𝑑𝑚 (8). 𝑐 They are calculated substituting the power-law expressions Eqs. (8) of the main text v(m)=Am-γ ; f(m)=Km-α (9) from which it follows that 𝐶 𝐼 = 𝐾𝐴 ∫𝑐 𝑚−(𝛼+𝛾) 𝑑𝑚 (10) whose result is (α+γ≠1) 6 𝐼 = 𝐾𝐴 𝐶 1−(𝛼+𝛾) − 𝑐1−(𝛼+𝛾) 1 − (𝛼 + 𝛾) (11) In a similar way, one calculates the integrals 𝐶 ∫ 𝑓(𝑚)𝑣(𝑚)2 𝑑𝑚 = 𝐴2 𝐾 𝑐 𝐶 1−(𝛼+2𝛾) − 𝑐1−(𝛼+2𝛾) 1 − (𝛼 + 2𝛾) (12) and 𝐶 ∫ 𝑓(𝑚)𝑑𝑚 = 𝐾 𝑐 𝐶 1−𝛼 − 𝑐1−𝛼 1−𝛼 (13) Text S6. Increase of the run-out due to extra boosting Assuming the landslide as purely frictional, when travelling on the flat plate the run-out R and the horizontal velocity after the slope break U are related with the equation 1 µ g R = UX2 (14) 2 If the landslide acquires an extra boost ΔPx=(UX+ΔUX)M corresponding to increased velocity UX+ΔUX, the new equation will be 1 µ g (R + 𝛥𝑅) = (UX + 𝛥UX )2 2 (15) From Eq. (14) it follows that R=UX2/(2µ g) which can be used to divide both members of Eq. (15) by R to find 𝛥𝑅 R =( 𝛥UX 2 UX ) +2 𝛥UX UX (16) Of the two terms on the right hand side, the second one is expected to be much greater. The extra velocity is linked to the increased momentum boost by ΔPx=MΔU and Px=MU. Thus, the relative increase in the run-out is about twice the relative increase in velocity (and also in momentum, if the mass remains the same). 7 Text S7. References Bowman, E.T., Take, W.A., Rait, K.L., Hann, C. 2012. Physical models of rock avalanche spreading behavior with dynamic fragmentation. Can. Geotech. J. 49, 460476. De Blasio, F.V., 2012. Preliminary discrete model in a computer simulation of cohesive debris flows. Geotechnical Geological Engineering 30, 269-276. Haug, T. Ø., Rosenau, M., Leever, K., and Oncken, O. 2014. Modelling fragmentation in rock avalanches. In Proc. 3rd World Landslide Forum, Sassa, K., Canuti, P., Yin, Y., (Eds), Springer-Verlag, 93-100 Pfeiffer, T., and Bowen, T. 1989. Computer simulation of rockfalls. Bulletin of the association of Engineering Geologists XXVI (1), 185-196. Rhodes, M. 1989. Introduction to particle technology. Wiley, New York, 320pp. Thornton, C. 2000. Numerical simulations of deviatoric shear deformation of granular media. Géotechnique. 50, No. 1, 43–53. 8