Design of a Tomahawk Cruise Missile Booster Rocket Motor
by
Devon K. Cowles
An Engineering Project Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the degree of
MASTER OF MECHANICAL ENGINEERING
Approved:
_________________________________________
Ernesto Gutierrez-Miravete, Project Adviser
Rensselaer Polytechnic Institute
Hartford, Connecticut
May, 2012
i
© Copyright 2012
by
Devon K. Cowles
All Rights Reserved
ii
CONTENTS
LIST OF TABLES ............................................................................................................. v
LIST OF FIGURES .......................................................................................................... vi
LIST OF EQUATIONS ................................................................................................... vii
LIST OF SYMBOLS ........................................................................................................ ix
Glossary ........................................................................................................................... xii
ABSTRACT ................................................................................................................... xiii
1. Introduction\Background ............................................................................................. 1
1.1
Rockets ............................................................................................................... 1
1.2
Mission Requirements........................................................................................ 2
1.3
Structural Requirements ..................................................................................... 3
2. Methodology ................................................................................................................ 4
2.1
Assumptions ....................................................................................................... 4
2.2
Flight Performance ............................................................................................. 5
2.3
Motor thrust requirements .................................................................................. 6
2.4
Motor Casing Sizing .......................................................................................... 9
2.5
Material ............................................................................................................ 11
2.5.1
Aluminum Alloy .................................................................................. 11
2.5.2
Composite Material .............................................................................. 11
3. Results........................................................................................................................ 16
3.1
Engine Parameters ............................................................................................ 16
3.2
Aluminum Alloy Casing Design ...................................................................... 16
3.3
3.2.1
Aluminum Casing Geometry ............................................................... 16
3.2.2
Finite Element Analysis ....................................................................... 17
Composite Casing Design ................................................................................ 21
3.3.1
Layup.................................................................................................... 21
3.3.2
Composite Casing Geometry ............................................................... 22
iii
3.3.3
Finite Element Analysis ....................................................................... 24
3.3.4
Aluminum to Composite Comparison ................................................. 27
4. Conclusion ................................................................................................................. 29
References........................................................................................................................ 30
Appendix A – Classical Lamination Matlab Code .......................................................... 31
iv
LIST OF TABLES
Table 1.1 Mission Requirements ....................................................................................... 2
Table 1.2 Tomahawk Cruise Missile Specifications ......................................................... 2
Table 1.3 Available Composite Propellant ........................................................................ 3
Table 2.1 E357 T-6 Casted Aluminum ............................................................................ 11
Table 2.2 Hexcel Intermediate Modulus Carbon Fiber/Resin Properties ........................ 12
Table 3.1 Engine Parameters ........................................................................................... 16
Table 3.2 Aluminum Engine Weight ............................................................................... 17
Table 3.3 Laminate Properties Calculated by CLT ......................................................... 22
Table 3.4 Composite Engine Weight ............................................................................... 23
Table 3.5 Laminate Properties in ANSYS ....................................................................... 24
Table 3.6 Composite Casing Stress and Margins ............................................................ 27
v
LIST OF FIGURES
Figure 1.1 Typical Rocket Components [2] ...................................................................... 1
Figure 2.1 Rocket Free Body Diagram [3] ........................................................................ 5
Figure 2.2 Aluminum Engine Casing Concept ................................................................ 10
Figure 2.3 Composite Engine Casing Concept ................................................................ 10
Figure 2.4 Finite Element Load and Boundary Conditions ............................................. 11
Figure 3.1 Aluminum Alloy Casing Detail...................................................................... 17
Figure 3.2 Maximum Stress Aluminum Engine Casing Upper ....................................... 18
Figure 3.3 Maximum Stress Aluminum Engine Casing Lower ...................................... 19
Figure 3.4 Assembly Flight Path ..................................................................................... 19
Figure 3.5 Flight Performance ......................................................................................... 20
Figure 3.6 Rocket Angle, Altitude and Velocities ........................................................... 21
Figure 3.7 Composite Casing Detail ................................................................................ 23
Figure 3.8 FEA Geometry for Composite Casing ........................................................... 24
Figure 3.9 Load and Boundary Conditions Composite Casing ....................................... 25
Figure 3.10 Maximum Total Deformation Composite Casing ........................................ 26
Figure 3.11 Top Radius Stress Composite Casing .......................................................... 26
Figure 3.12 Flight Performance Comparison .................................................................. 28
vi
LIST OF EQUATIONS
Equation 2.1 – Flight path angle to ground ....................................................................... 5
Equation 2.2 – Axial acceleration at 1,000 feet ................................................................ 6
Equation 2.3 – Axial acceleration below1,000 feet ........................................................... 5
Equation 2.4 – Radial acceleration above 1,000 feet......................................................... 6
Equation 2.5 – Radial acceleration below 1,000 feet ........................................................ 6
Equation 2.6 – Axial velocity ............................................................................................ 6
Equation 2.7 – Radial velocity........................................................................................... 6
Equation 2.8 – Axial dispacement ..................................................................................... 6
Equation 2.9 – Radial dispacement .................................................................................. 6
Equation 2.10 – Horizontal distance and altitude matrix .................................................. 6
Equation 2.11 – Propellant burn Area ............................................................................... 6
Equation 2.12 – X Function ............................................................................................... 7
Equation 2.13 – Nozzle exit area ....................................................................................... 7
Equation 2.14 – Nozzle throat area.................................................................................... 7
Equation 2.15 – Combustion chamber pressure ................................................................ 7
Equation 2.16 – Propellant burn rate ................................................................................. 7
Equation 2.17 – Expansion ratio ........................................................................................ 7
Equation 2.18 – Exit pressure ............................................................................................ 8
Equation 2.19 – Ideal thrust coefficient ............................................................................. 8
Equation 2.20 – Actual thrust coefficient .......................................................................... 8
Equation 2.21 – Specific impulse ...................................................................................... 8
Equation 2.22 – Propellant core area ................................................................................. 8
Equation 2.23 – Propellant core volume............................................................................ 8
Equation 2.24 – Combustion chamber volume.................................................................. 8
Equation 2.25 – Propellant volume ................................................................................... 8
Equation 2.26 – Propellant mass ....................................................................................... 8
Equation 2.27 – Mass flow ................................................................................................ 8
Equation 2.28 – Burn time ................................................................................................. 8
Equation 2.29 – Total impulse ........................................................................................... 9
vii
Equation 2.30 – Laminae Stress/Strain relationship ........................................................ 13
Equation 2.31 – Laminae Reduced Compliance Stress/Strain relationship .................... 13
Equation 2.32 – Laminae Global Reduced Compliance Stress/Strain relationship........ 13
Equation 2.33 – Transformation matrix........................................................................... 13
Equation 2.34 – Laminae Transformed Stress/Strain relationship .................................. 13
Equation 2.35 – Laminae global x stiffness..................................................................... 13
Equation 2.36 – Laminae global y stiffness..................................................................... 13
Equation 2.37 – Laminae global shear modulus .............................................................. 13
Equation 2.38 – Laminae Poisson’s ratio xy ................................................................... 13
Equation 2.39 – Laminae Poisson’s ratio yx ................................................................... 14
Equation 2.40 – Laminae Global Reduced Stiffness Stress/Strain relationship ............. 14
Equation 2.41 – Reduced Stiffness Matrix definition ..................................................... 14
Equation 2.42 – Extensional stiffness matrix .................................................................. 14
Equation 2.43 – Couplingstiffness matrix ....................................................................... 14
Equation 2.44 – Bending stiffness matrix........................................................................ 14
Equation 2.45 – Laminate Load/Strain relationship ........................................................ 14
Equation 2.46 – Tsai-Hill failure criteria ......................................................................... 15
Equation 3.1 – Yield stress margin of safety ................................................................... 18
Equation 3.2 – Ultimate stress margin of safety .............................................................. 18
viii
LIST OF SYMBOLS
Motion
a – Acceleration (ft/s2)
awing – Lift/Mass of Missile Wing. (32.174 ft/s2)
Cd – Coefficient of Drag
Cl – Coefficient of Lift
F – Engine Thrust (lbf)
g – Acceleration of Gravity on Earth (32.174 ft/s2)
l/d ratio – Ratio of Cl to Cd
tn – Time at Increment n (s).
Ψ – Engine Thrust Relative to Horizontal (degrees)
ρair – Density of Air (lb/ft3)
θ – Direction of Flight Relative to Horizontal (degrees)
v – Velocity in Rocket Coordinates (ft/s)
x – Axial Displacement in Rocket Coordinates (ft)
y – Radial Displacement in Rocket Coordinates (ft)
ix
Engine
A* – Nozzle Throat Cross-Sectional Area (in2)
Ab – Propellant Burning Area (in2)
Aconduit – Area of Core in Propellant Charge (in2)
Ae – Cross Sectional Area of Exhaust Cone (in2)
Cf – Thrust Coefficient
dc – Propellant Outer Diameter (in)
de – Diameter of Exhaust Cone (in)
ε – Expansion Ratio
Fn – Engine Thrust (lbf)
γ – Specific Heat Ratio
Isp – Specific Impulse (s)
It – Total Impulse (lbf-s)
k – Propellant Burn Rate Factor
Lc – Length of Propellant (in)
ṁ – Mass Flow Rate (lbm/s)
mc – Mass of Propellant (lbm)
n – Propellant Burn Rate Factor
Pc – Chamber Pressure (psi)
Po – Atmospheric Pressure (psi)
R – Gas Constant (lbf-in/lbm-R)
rb – Propellant Burn Rate (in/s)
tb – Propellant Burn Time (s)
ρp – Density of Propellant (lbm/in3)
Tc – Propellant Burn Temperature (°R)
V0 – Volume of No Core Propellant (in3)
Vc – Propellant Volume (in3)
Vconduit – Conduit Volume (in3)
X*– Non-Dimensional Mass Flow Rate in Nozzle Throat
x
Material
E – Young’s Modulus (psi)
ε – Normal Strain (in/in)
γ – Shear Strain (in/in)
Fcy – Yield Compressive Strength (psi)
Fcu – Ultimate Compressive Strength (psi)
Fty – Yield Tensile Strength (psi)
Ftu – Ultimate Tensile Strength (psi)
Fsu – Ultimate Shear Strength (psi)
G – Shear Modulus (psi)
M.S.yld-comp – Yield Strength Margin of Safety – Compressive
M.S.ult-comp – Ultimate Strength Margin of Safety – Compressive
M.S.yld-tensile – Yield Strength Margin of Safety – Tensile
M.S.ult-tensile – Ultimate Strength Margin of Safety – Tensile
ν – Poisson’s Ratio
σ – Normal Stress (psi)
[Q] – Laminae Reduced Stiffness Matrix (psi)
[Q̅] – Laminae Transposed Reduced Stiffness Matrix (psi)
[S] – Laminae Reduced Compliance Matrix (in2/lb)
[S̅] – Laminae Transposed Reduced Compliance Matrix (in2/lb)
τ –Shear Stress (psi)
xi
Glossary
Adiabatic – A thermodynamic process in which heat is neither added nor removed from
the system.
AL – Aluminum powder used as a solid fuel in a solid rocket motor.
ANSYS – Software created by ANSYS Inc. used for finite element analysis.
AP – A solid oxidizer made of Ammonium Perchlorate.
BurnSim – Software created by Gregory Deputy to simulate the performance of a solid
propellant rocket motor.
BATES – A cylindrical solid propellant configuration with a cylindrical core.
CATIA – Software created by Dassault Systémes to perform 3 dimensional computer
aided design.
CLT – Classical Laminate Theory used to calculate laminate properties from the
properties of the individual layers.
Condi Nozzle – A convergent/divergent nozzle.
CTPB – A polymer binder material made of Carboxyl Terminated Polybutadiene.
Isentropic – A thermodynamic process in which there is no change in entropy of the
system.
Laminae – A single layer of a composite matrix.
Laminate – A stack of laminae.
Slinch – Unit of mass in the United States customary units. 12 Slugs = 1 Slinch.
xii
ABSTRACT
The purpose of this project is to design a ground launched rocket booster to meet
specific mission requirements.
The mission constraints include minimum speed,
maximum flight altitude as well as length and weight limits. The mission is to launch a
3,000 lb payload such as a Tomahawk cruise missile to an altitude of 1,000 feet and
accelerate the missile to 550 MPH (807 fps). To meet these mission requirements, the
weight of the rocket body should be as light as possible while maintaining the required
structural integrity and reliability.
The motor parameters such as the nozzle size,
expansion ratio, propellant size and shape are determined through an iterative process.
The thrust performance from a preliminary motor design is used to calculate the
resulting flight performance based on the calculated thrust overcoming gravity, inertia
and aerodynamic drag of the booster rocket and cruise missile assembly. The engine
nozzle parameters are then varied to meet the mission requirements and to minimize
excess capability to ensure a weight efficient motor.
The initial motor casing design
will be made of light weight cast aluminum. The aluminum motor design will be
compared to a design made of a fiber and resin composite material. The composition and
layup of the composite material and the thickness of the aluminum material will be
designed to meet industry standard safety margins based on the material’s strength
properties. This paper will present the calculated engine parameters as well as the
engine weight and engine size for both the aluminum casing and the composite casing.
xiii
1. Introduction\Background
1.1 Rockets
Rockets are a type of aircraft used to carry a payload at high speeds over a wide range of
distances depending on the design. Rockets are powered by a reaction type engine
which uses chemical energy to accelerate and expel mass through a nozzle and relies on
the principles of Sir Isaac Newton’s third law of motion [1] to propel the rocket forward.
Rocket engines use either solid or liquid fuel. They carry both the fuel and the oxidizer
required to convert the fuel into thermal energy and gas byproducts. The gas byproducts
under pressure are then passed through a nozzle which converts the high pressure low
velocity gas into a low pressure high velocity gas.
The following figure shows the different components of a typical rocket.
Figure 1.1 Typical Rocket Components [2]
1
1.2
Mission Requirements
The rocket considered in this study is a ground launched booster that is used to launch a
payload such as a Tomahawk cruise missile to a prescribed altitude and to a required
velocity. The mission can be viewed in three phases. In the first phase, the booster is on
the ground at rest and launches vertically. In the second phase, the assembly transitions
from a vertical orientation to a horizontal orientation while climbing to 1,000 feet. In the
third phase, the booster accelerates the payload horizontally to 550 MPH (807 fps). The
rocket engine must be sized appropriately to meet the mission requirements as
summarized in Table 1.1. The Tomahawk cruise missile specifications are listed in
Table 1.2. The cruise missile in this mission will use an onboard gas turbine engine to
continue flight once the missile has reached 1,000 ft altitude and 550 MPH (807 fps). In
the horizontal portion of the flight, the cruise missile will deploy the stowed wings to
provide lift which will allow the thrust of the booster to be used solely to accelerate the
missile to the appropriate speed. Once the missile has reached the target altitude and
speed and the solid propellant has been consumed, the booster will be jettisoned from the
cruise missile assembly to fall back to earth. The total assembly is limited to 3,500 lbm
and the payload is 2,700 lbm. The properties of the fuel to be used in this mission are
shown in Table 1.3.
Table 1.1 Mission Requirements
Value
Units
Altitude range
0 - 1,000
ft
Minimum Velocity
550
MPH
Maximum Mass
3,500
lbm
Payload Mass
2700
lbm
Table 1.2 Tomahawk Cruise Missile Specifications
RGM 109D
Length (in)
Diameter (in)
Weight (lb)
219
20.9
2700
2
Table 1.3 Available Composite Propellant
Oxidizer %
AP (70%)
Fuel Binder %
CTPB (12%)
Metallic Fuel %
AL (16%)
Curative %
Epoxy (2%)
Flame Temperature (R)
6,840
Burning Rate Constants
k
.0341
n
0.4
3
Density (slinch/in )
1.64E-4
Molecular Weight (kg/kmole)
29.3
Gas Constant (lb-in/slinch-R)
238,662.7
Ratio of Specific Heats
1.17
Characteristic Velocity (in/s)
62008
1.3 Structural Requirements
The rocket engine casing must be able to withstand the internal engine pressure loads
and the force applied to the payload through the attachment point. In some locations, the
casing materials must be able to withstand high pressures and elevated temperatures due
to the combustion of the fuel.
In this project, the casing design will be determined based on the stress analysis using
closed form equations and the finite element method. The nozzle and casing will be
sized using E357-T6 aluminum alloy and then resized using carbon fiber/resin composite
materials. The components will be sized based on the maximum load and pressure the
casing will be subjected to during the mission. This maximum load will be referred to as
the limit load.
3
2. Methodology
2.1 Assumptions
The following assumptions are made for the motor design to simplify the analysis.
1) The booster is an ideal rocket. This is to assume the following six assumptions
are true or they are corrected for with an efficiency factor. See Equation 2.20.
2) The specific heat ratio (γ) of the exhaust gases is constant throughout the booster.
The specific heat ratio is a function of temperature and temperature is assumed to
be constant due to thermal insulation and low dwell time.
3) Flow through the nozzle is adiabatic, isentropic and one dimensional. This
assumption claims the process is reversible, no heat is lost and pressure and
temperature changes only occur in the axial direction. The true losses in the
system are accounted for in the efficiency factor.
4) There is no loss of total pressure during combustion. True pressure losses are
accounted for with the efficiency factor.
5) The flow area in the combustion chamber is large compared to the nozzle area so
the velocity at the nozzle entrance is negligible.
6) All of the exhaust gasses exit the nozzle in the axial direction. Due to the low
altitude range of this mission, the nozzle can be design such that the exhaust flow
is axial.
7) The nozzle is a fully expanding Condi nozzle. Due to the narrow altitude range
of this mission, the nozzle can be designed such that the exhaust is fully
expanding and not over or under expanded.
8) The coefficient of drag for the payload and booster assembly is 0.75. The actual
drag coefficient will be based on tests.
9) In the rocket combustion chamber, there is a 2mm (0.079 inch) liner is made of a
material of sufficient properties to keep the casing temperatures below 300
degrees Fahrenheit. This assumption is reasonable based on similar designs and
preliminary thermal analysis not presented here.
4
2.2 Flight Performance
Thrust is required to accelerate the payload, fuel and motor casing mass to 1,000 feet and
550 MPH (807 fps) overcoming the forces of gravity, mass inertia and aerodynamic
body drag. As the propellant is consumed, the thrust increases and the mass of the
booster assembly decreases. As a result, the axial and the radial acceleration, velocity
and displacement are calculated in a discretized fashion for time steps of 0.01 seconds.
The displacements are then transformed from the rocket reference frame to the ground
reference frame to determine altitude and horizontal velocity.
The flight path is predetermined to transitions from a vertical flight to a horizontal path
based on the function [3]:
𝒂𝒍𝒕𝒊𝒕𝒖𝒅𝒆
𝜽 = 𝐜𝐨𝐬 −𝟏 (𝒕𝒂𝒓𝒈𝒆𝒕 𝒂𝒕𝒊𝒕𝒖𝒅𝒆)
[2.1]
θ is the angle of the rocket axis to the ground as shown in Figure 2.1. The rocket at the
beginning of the launch is vertical (θ=90°).
Figure 2.1 Rocket Free Body Diagram [3]
The axial acceleration of the body is calculated by the following equation below 1,000
feet:
𝑭
𝒄
𝒅
𝒂𝒙 = 𝒎 𝐜𝐨𝐬(𝝋 − 𝜽) − 𝟐𝒎
𝝆𝒂𝒊𝒓 𝒗𝟐𝒙 𝑨𝒇𝒓𝒐𝒏𝒕 − 𝒈 𝒔𝒊𝒏𝜽
[2.2]
The axial acceleration is calculated by the following equation when the cruise missile
wings are deployed at 1,000 feet:
5
𝑭
𝒂𝒙 = 𝒎 𝐜𝐨𝐬(𝝋 − 𝜽) −
𝒂𝒘𝒊𝒏𝒈
𝒍
𝒓𝒂𝒕𝒊𝒐
𝒅
𝒄
𝒅
− 𝟐𝒎
𝝆𝒂𝒊𝒓 𝒗𝟐𝒙 𝑨𝒇𝒓𝒐𝒏𝒕 − 𝒈 𝒔𝒊𝒏𝜽
[2.3]
The acceleration in the direction perpendicular to the cruise missile wingspan plane is
calculated as follows when below 1,000 ft is:
𝑭
𝒄
𝒅
𝒂𝒚 = 𝒎 𝐬𝐢𝐧(𝝋 − 𝜽) − 𝟐𝒎
𝝆𝒂𝒊𝒓 𝒗𝟐𝒚 𝑨𝒃𝒐𝒅𝒚 − 𝒈 𝒄𝒐𝒔𝜽
[2.4]
The acceleration in the direction perpendicular to the cruise missile wingspan plane is
calculated as follows when the cruise missile wings are deployed at 1,000 ft:
𝑭
𝒄
𝒅
𝒂𝒚 = 𝒎 𝐬𝐢𝐧(𝝋 − 𝜽) + 𝒂𝒘𝒊𝒏𝒈 − 𝟐𝒎
𝝆𝒂𝒊𝒓 𝒗𝟐𝒚 𝑨𝒃𝒐𝒅𝒚 − 𝒈 𝒄𝒐𝒔𝜽
[2.5]
The axial (x) and radial (y) velocity is calculated using:
𝒗𝒙 (𝒕𝒏 ) = 𝒗𝒙 (𝒕𝒏−𝟏 ) + 𝒂𝒙 (𝒕𝒏−𝟏 ) ∗ (𝒕𝒏 − 𝒕𝒏−𝟏 )
[2.6]
𝒗𝒚 (𝒕𝒏 ) = 𝒗𝒙 (𝒕𝒏−𝟏 ) + 𝒂𝒚 (𝒕𝒏−𝟏 ) ∗ (𝒕𝒏 − 𝒕𝒏−𝟏 )
[2.7]
And the displacement is similarly calculated:
𝒙(𝒕𝒏 ) = 𝒙(𝒕𝒏−𝟏 ) + 𝒗𝒙 (𝒕𝒏−𝟏 ) ∗ (𝒕𝒏 − 𝒕𝒏−𝟏 )
[2.8]
𝒚(𝒕𝒏 ) = 𝒚(𝒕𝒏−𝟏 ) + 𝒗𝒚 (𝒕𝒏−𝟏 ) ∗ (𝒕𝒏 − 𝒕𝒏−𝟏 )
[2.9]
The displacement values are then transformed into the ground reference frame to
determine the horizontal distance and the altitude.
𝒉𝒐𝒓𝒊𝒛𝒐𝒏𝒕𝒂𝒍 𝒅𝒊𝒔𝒕𝒂𝒏𝒄𝒆(𝒕𝒏 )
𝒉𝒐𝒓𝒊𝒛𝒐𝒏𝒕𝒂𝒍 𝒅𝒊𝒔𝒕𝒂𝒏𝒄𝒆(𝒕𝒏−𝟏 )
𝒎 −𝒏 𝒙(𝒕𝒏 ) − 𝒙(𝒕𝒏−𝟏 )
[
]=[
]+[
][
]
𝒏 𝒎 𝒚(𝒕𝒏 ) − 𝒚(𝒕𝒏−𝟏 )
𝒂𝒍𝒕𝒊𝒕𝒖𝒅𝒆(𝒕𝒏 )
𝒂𝒍𝒕𝒊𝒕𝒖𝒅𝒆(𝒕𝒏−𝟏 )
[2.10]
Where m=cos(θ) and n=sin(θ).
2.3 Motor thrust requirements
The equations above are dependent on the thrust (F) of the booster engine. The thrust is
calculated using equations found in [4]. For the preliminary sizing of the rocket motor,
these closed form equations are used to calculate the engine performance.
The
maximum diameter of the engine is sized to be similar to that of the cruise missile. The
length of the propellant is limited to 26 inches to minimize the length of the booster
motor. Knowing the diameter and the length of the charge, the burn diameter can be
calculated:
𝑨𝒃 = 𝝅 ∙ 𝒅𝒄 ∙ 𝑳𝒄
6
[2.11]
The X*-function is the non-dimensional mass flow of the motor and is calculated by:
𝟐
∗
𝑿 = √𝜸 [𝜸+𝟏]
𝜸+𝟏
𝟐(𝜸−𝟏)
[2.12]
The exhaust cone diameter is a variable that can influence thrust and is adjusted as
needed in the design to get the appropriate thrust based on a given expansion ratio. The
chosen diameter for this rocket motor is 13 inches. The exit area is calculated from the
cone diameter.
𝝅
𝑨𝒆 = 𝟒 𝒅𝟐𝒆
[2.13]
The nozzle area is calculated from the exit area and the prescribed expansion ration
epsilon. The expansion ratio can be adjusted in the design phase in an iterative nature to
achieve the required thrust.
𝑨∗ =
𝑨𝒆
[2.14]
𝜺
The chamber pressure can now be calculated based on the propellant properties and the
nozzle area.
𝟏
𝑷𝒄 = [
𝝆𝒑 ∙𝑨𝒃 √𝑹∙𝑻𝒄 𝟏−𝒏
𝑨∗ ∙𝑿∗
]
[2.15]
The burn rate of the propellant is sensitive to the chamber pressure. The burn rate is
calculated as:
𝒓𝒃 = 𝒌 ∙ 𝒑𝒏𝒄
[2.16]
As can be seen in the previous two equations, the chamber pressure is dependent on
the burn rate and the burn area. Both the burn rate and the burn area are increasing as
the propellant is consumed which provides a progressive burn rate. To minimize this
effect, creative cross sectional areas can be made so that the total area does not increase
with propellant consumption.
In order to calculate the thrust coefficient, the exit velocity or exit Mach number need to
be calculated. Due to the nature of the following equations, an iterative process is used
to solve for Me.
𝜸+𝟏
𝟏
𝜺 = 𝑴 (𝟏 +
𝒆
𝜸−𝟏
𝟐
∙
𝜸+𝟏
𝟐 𝟐(𝜸−𝟏)
𝟐(𝜸−𝟏)
𝑴𝟐𝒆 )
(𝜸+𝟏)
7
[2.17]
−𝜸
𝑷𝒆 = 𝑷𝒄 (𝟏 +
𝜸−𝟏
𝟐
∙
𝜸−𝟏
𝑴𝟐𝒆 )
[2.18]
Knowing the exit velocity and the chamber pressure, the thrust coefficient is calculated
as shown.
𝜸+𝟏
𝟐
𝜸−𝟏
𝜸
𝟐𝜸
𝟐 𝜸−𝟏
𝑷
𝑪𝑭 = √𝜸−𝟏 [𝜸+𝟏] [𝟏 − (𝑷𝒆 )
𝒄
𝑨
] + 𝑨𝒆∗ [
𝑷𝒆 −𝑷𝒐
𝑷𝒄
]
[2.19]
These calculations are based on an ideal nozzle with full expansion. Due to thermal and
other losses, the actual thrust coefficient will be about 90% of the ideal thrust
coefficient.
𝑪𝑭 𝒂𝒄𝒕𝒖𝒂𝒍 = 𝟗𝟎% ∙ 𝑪𝑭
[2.20]
A measure of the efficiency of the rocket design is the specific impulse. The specific
impulse can provide an idea of the propellant flow rate required for the given thrust. The
theoretical specific impulse is calculated by:
𝑪∗ ∙𝑪𝑭𝒂𝒄𝒕𝒖𝒂𝒍
𝑰𝒔𝒑 =
𝒈
[2.21]
The area of the core in the BATES type fuel configuration or a cylindrical configuration
should be four times the area of the nozzle to prevent erosive burning. From this area,
the volume of the core can be calculated using the propellant length. The propellant
volume is calculated by subtracting this core volume from the combustion chamber
volume. From this volume, the mass of the propellant can be determined.
𝑨𝒄𝒐𝒏𝒅𝒖𝒊𝒕 = 𝟒 ∙ 𝑨∗
[2.22]
𝑽𝒄𝒐𝒏𝒅𝒖𝒊𝒕 = 𝑨∗ 𝑳𝒄
[2.23]
𝑽𝟎 = 𝑨𝒃 𝑳𝒄
[2.24]
𝑽𝒑 = 𝑽𝟎 − 𝑽𝒄𝒐𝒏𝒅𝒖𝒊𝒕
[2.25]
𝒎𝒄 = 𝝆𝒑 ∙ 𝑽𝒑
[2.26]
To calculate the burn time, the mass flow rate is determined and then the burn time is
calculated based on the propellant mass.
𝒎̇ = 𝑰
𝒕𝒃 =
𝑭𝒏
[2.27]
𝒔𝒑 ∙𝒈
𝒎𝒄
[2.28]
𝒎̇
8
An important characteristic of the motor performance is the total impulse. This is the
average thrust times the burn time.
𝑰 𝒕 = 𝑭𝑵 ∙ 𝒕𝒃
[2.29]
All of the above calculations are performed in Microsoft Excel. The internal iterative
solver in Excel is used to determine the appropriate nozzle diameter and exhaust cone
diameter to meet the mission requirements.
The Excel spreadsheet also calculates
additional engine parameters including chamber pressure which is required to properly
size the structural components of the engine casing.
The BurnSim software is then used to more accurately calculate the engine thrust,
chamber pressure and the mass flow. These parameters are then imported into Excel to
calculate the flight performance based on the BurnSim results.
2.4 Motor Casing Sizing
Based on the thrust load and the chamber pressure, the stresses in the initial casing
design is analyzed using closed form equations provided in Roark’s Handbook [5].
ANSYS finite element software is then used to determine the stresses in the final casing
design. The stresses are compared to the yield and ultimate strength of the material. An
aerospace standard factors of safety of 1.5 for ultimate strength and 1.15 for yield
strength. The metal alloy version of the rocket casing is to be made of a cast E357-T6
aluminum. Casting the casing will minimize the number of bolted joints and maximize
the strength of the structure which will minimize the weight. The aluminum casing
concept is shown in Figure 2.2. The filler is a light weight polymer designed to prevent
end burning of the propellant opposite the nozzle. The liner is a thin coating on the
casing made of a material designed to keep the casing temperature below 300°F. The
filler, liner and propellant can be poured into the casing with a core plug and then cured.
The plug is then removed. The nozzle can be made of high temperature material
designed for the direct impingement of hot gases. There are many such materials listed
in [3].
The nozzle could be segmented into axially symmetric pieces to facilitate
assembly and then bonded into place. The composite material version of the rocket
9
motor casing will be designed of a similar shape as shown in Figure 2.3. The composite
assembly will be assembled similar to the aluminum version except the Thrust Plate is
bonded to the top of the casing.
Liner
Propellant
Integral igniter
housing
Filler
Nozzle
Casing
Figure 2.2 Aluminum Engine Casing Concept
Propellant
Liner
Nozzle
Thrust Plate/
Igniter Housing
Filler
Casing
Figure 2.3 Composite Engine Casing Concept
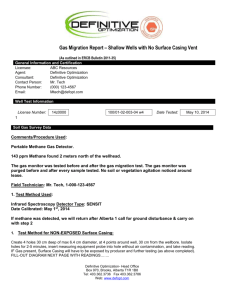
Figure 2.4 shows a typical 2 dimensional axisymmetric finite element model used to
analyze the motor casing. Pressure is applied to the internal surfaces up to the nozzle
where the pressure drops to near ambient values. A thrust load is applied to the top
surface in the axial direction (depicted as “C”). This load application represents where
the thrust is transferred to the payload. The casing is grounded at the end of the nozzle.
The load is typically distributed throughout the nozzle and not concentrated on the end
but the nozzle is structurally sturdy and not an area of concern for this project.
10
Figure 2.4 Finite Element Load and Boundary Conditions
2.5 Material
2.5.1
Aluminum Alloy
The Table 2.1 shows the material properties for E357T-6 cast aluminum prepared per
AMS 4288 [6]. This alloy is used since it has a relatively high strength to weight ratio
for a cast alloy.
Table 2.1 E357 T-6 Casted Aluminum
AMS 4288
Ftu (ksi)
Fty (ksi)
Fcy (ksi)
Fsu (ksi)
E (ksi)
ν
ρ (lb/in3)
T=72°F
45
36
36
28
10.4E3
0.33
0.097
T=300°F
39
37
-
-
10.6E3
-
-
2.5.2
Composite Material
A carbon epoxy composite material from Hexcel [8] is chosen for the composite version
of the casing. The properties for unidirectional fibers are shown in Table 2.2. The
11
maximum casing temperature is 300°F and so the strength is reduced by 10% based on
similar material trends. The strength is further reduced by 50% as an industry standard
ultimate strength safety factor.
Table 2.2 Hexcel Intermediate Modulus Carbon Fiber/Resin Properties
room
temperature
300°F
1.5 Safety
Factor
Ftu 1
Fcu 1
Ftu 2
Fcu 2
F12
E1
E2
G12
(psi)
(psi)
(psi)
(psi)
(psi)
(psi)
(psi)
(psi)
348,000
232,000
11,000
36,200
13,800
313,200
208,800
9,900
32,580
12,420
2,466,000
1,305,000
638,000
208,800
139,200
6,600
21,720
8,280
ν12
0.27
This unidirectional material is layered several plies thick into a laminate. In this project,
the laminate is made of 84 layers with each layer being 0.006 in thick for a total of 0.504
thick. Some of the layers will be at different angles from the others to tailor the material
for the mission loads. This allows the composite material to be optimized to minimize
weight without sacrificing strength. The overall laminate properties will be calculated
based on the material properties in Table 2.2 utilizing Classical Laminate Theory and
Kirchoff’s Hypothesis [7]. The following assumptions are made:
1) Lines normal to the midplane of a layer remain normal and straight and normal
during bending of the layer.
2) All laminates are perfectly bonded together so that there is no dislocation
between layers.
3) Properties for a layer are uniform throughout the layer.
4) Each ply can be modeled using plane stress per Kirchoff’s Hypothesis.
The following are the equations used to model the composite. For details see [7].
The stress strain relationship of the laminate is defined by:
{𝜀} = [𝑆]{𝜎}
This equation is expanded to:
12
𝜺𝟏
𝜺𝟐
𝜺𝟑
𝜸𝟐𝟑 =
𝜸𝟐𝟑
[𝜸𝟏𝟐 ]
𝟏
−𝛎𝟏𝟐
−𝛎𝟏𝟐
𝐄𝟏
−𝛎𝟏𝟐
𝐄𝟐
𝟏
𝐄𝟐
−𝛎𝟐𝟑
𝐄𝟐
−𝛎𝟏𝟐
𝐄𝟐
−𝛎𝟐𝟑
𝐄𝟐
𝟏
𝐄𝟐
𝐄𝟐
𝐄𝟐
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
[ 𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎
𝟏
𝝈𝟏
𝝈𝟐
𝟎
𝟎
𝟎
𝟎
𝟎
𝟎 {𝝉𝟏𝟐 }
𝟎
𝐆𝟐𝟑
𝟏
𝐆𝟏𝟐
𝟎
[2.30]
𝟏
𝐆𝟏𝟐 ]
Using plane stress assumptions, the equation can be reduced to the following:
𝜺𝟏
𝑺𝟏𝟏
𝜺
{ 𝟐 } = [𝑺𝟐𝟏
𝜸𝟏𝟐
𝟎
𝝈𝟏
𝟎
𝟎 ] { 𝝈𝟐 }
𝑺𝟔𝟔 𝝉𝟏𝟐
𝑺𝟏𝟐
𝑺𝟐𝟐
𝟎
[2.31]
Where [S] in Equation 2.12 is the reduced compliance matrix. This matrix is
transformed for each layer to equate the properties into the laminate coordinate system
as follows:
𝜺𝒙
𝜺𝒚
𝑺𝟏𝟏
{
} = [𝑻]−𝟏 [𝑺𝟐𝟏
𝟏
𝜸
𝟎
𝟐 𝒙𝒚
𝑺𝟏𝟐
𝑺𝟐𝟐
𝟎
𝝈𝒙
𝟎 ] [𝑻] { 𝝈𝒚 }
𝟏
𝝉𝒙𝒚
𝑺
𝟐 𝟔𝟔
𝟎
[2.32]
Where
𝒎𝟐
𝒏𝟐
𝟐𝒎𝒏
𝟐
[𝑻] = [ 𝒏
𝒎𝟐
−𝟐𝒎𝒏 ]
−𝒎𝒏 𝒎𝒏 𝒎𝟐 − 𝒏𝟐
This can be represented by:
̅𝟏𝟏
𝜺𝒙
𝑺
̅𝟏𝟐
{ 𝜺 𝒚 } = [𝑺
𝜸𝒙𝒚
̅𝟏𝟔
𝑺
̅𝟏𝟐
𝑺
̅𝟐𝟐
𝑺
̅
𝑺𝟐𝟔
̅𝟏𝟔 𝝈𝒙
𝑺
̅𝟐𝟔 ] { 𝝈𝒚 }
𝑺
̅𝟔𝟔 𝝉𝒙𝒚
𝑺
[2.33]
[2.34]
The global properties for the laminate can be calculated as follows:
𝟏
𝑬𝒙 = 𝑺̅
[2.35]
𝟏𝟏
𝟏
𝑬𝒚 = 𝑺̅
[2.36]
𝟐𝟐
𝟏
𝑮𝒙𝒚 = 𝑺̅
[2.37]
𝟔𝟔
̅
𝑺
𝝂𝒙𝒚 = − ̅𝑺𝟏𝟐
𝟏𝟏
13
[2.38]
̅
𝑺
𝝂𝒚𝒙 = − 𝑺̅𝟏𝟐
[2.39]
𝟐𝟐
In the laminate coordinate system, the stress to strain relationship for a single layer can
be written as:
̅ ]{𝜺}
{𝝈} = [𝑸
[2.40]
[Q̅] = [S̅]-1
[2.41]
where
To create the overall laminate load to strain relationship, the ABD matrix is created as
follows:
N
_
A ij Qijk z k z k 1
[2.42]
k 1
[2.43]
D ij Q ijk z 3k z 3k 1
[2.44]
N
_
Bij Q ijk z 2k z 2k 1
k 1
N
_
k 1
Where zk is the z-directional position of the ply number k. In a symmetric layup, z=0 at
the midplane and is positive in the lower layers and negative in the upper layers.
The complete load to strain relationship matrix is:
N X A11
N A
Y 12
N XY A16
M B
X 11
M Y B12
M XY B16
A12
A16
B11 B12
A 22
A 26
B12
A 26
A 66
B16
B12 B22
B16 B26
D11 D12
B22
B26
D12
D 22
B26
B66
D16
D 26
0
B16 ε X
0
B26 ε Y
0
B66 γ XY
D16 κ 0X
D 26 κ 0Y
D 66 κ 0XY
[2.45]
The maximum stress for the laminate is based on Tsai-Hill failure criteria for each
layer. The laminate will be considered to have failed when any layer exceeds the
maximum allowed stress. An Excel spreadsheet is used to calculate the stress in the
layers based on the laminate stress from the finite element model. The layer stresses are
14
used with the Tsai-Hill equation to determine a static margin. The Tsai-Hill failure
criteria equation is as follows:
𝟐
𝝈
𝝈 𝝈
𝝈
𝟐
[𝑿𝟏 ] − [𝑿𝟏 𝑿𝟐 ] + [ 𝒀𝟐 ] + [
𝟏
𝟐 𝟐
Where
X1=F1t if σ1>0 and F1c if σ1<0
X2=F1t if σ2>0 and F1c if σ2<0
Y=F2t if σ2>0 and F2c if σ2<0
S=F12
15
𝝉𝟏𝟐 𝟐
𝑺
] <𝟏
[2.46]
3. Results
3.1 Engine Parameters
The predicted engine parameters based on the chosen nozzle diameter, expansion ratio
and fuel size are shown in Table 3.1.
Table 3.1 Engine Parameters
Parameter
Value
Units
Maximum Thrust
13,481
lb
Max Chamber Pressure
1,104
psi
Total Impulse
120,150
lbf-s
Specific Impulse
237
s
Burn Diameter
20.87
in
Conduit Diameter
6.55
in
Propellant Length
26
in
Burn Time
12.88
s
Nozzle Diameter
3.28
in
Nozzle Exit Diameter
8.02
in
Expansion Ratio
6.0
-
Exit Mach Number
2.86
-
1.61
-
1.45
-
Optimal Thrust
Coefficient
Thrust Coefficient Actual
3.2 Aluminum Alloy Casing Design
3.2.1
Aluminum Casing Geometry
Based on the engine parameters shown in Table 3.1, an engine casing is designed and
optimized for weight based on the material strength as shown in Table 2.1.
The
maximum casing temperature is 300°F and so the material properties are reduced from
the room temperature properties as shown in the table. Figure 3.1 shows the final
dimensions of the engine casing. Table 3.2 shows the final weight of the aluminum
16
engine casing assembly. The engine casing is ½ inch thick throughout most of the
design. Some areas of the casing are thicker to accommodate the stresses due to the
thrust load transmitted to the payload through the top of the casing in addition to the
internal pressure load.
Figure 3.1 Aluminum Alloy Casing Detail
Table 3.2 Aluminum Engine Weight
3.2.2
Component
Weight (lb)
Engine Casing
172
Fuel
507
Liner/Filler
50
Nozzle
7
Total
736
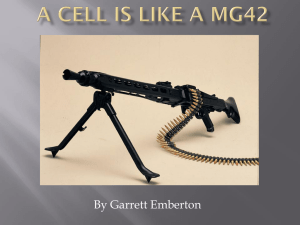
Finite Element Analysis
Linear elastic finite element analysis is performed using ANSYS Workbench V13. The
loads and boundary conditions are applied as shown in Figure 2.4 in section 2. The
results are shown in Figure 3.2 and Figure 3.3. The peak stress occurs in the top of the
casing in Figure 3.2 where the structure is supporting the internal pressure load as well
17
as a bending load due to the thrust load. The thickness of the casing in this area is
increased to 1.20 inches as shown in Figure 3.1. Figure 3.3 shows the stresses for the
lower section which are not as high as in the upper section. This peak stress in this
figure occurs where the structure is supporting a bending load in addition to the internal
pressure load. The thickness in this area is increased to 0.7 inches as shown in Figure
3.1 to accommodate the higher stresses. The margins of safety are calculated using the
maximum casing stress with a 1.5 safety factor on the ultimate strength and a 1.15 safety
factor on the yield strength.
𝑭𝒕𝒚
𝑴𝑺𝒚𝒍𝒅 = 𝟏.𝟏𝟓×𝝈
𝒎𝒂𝒙
𝑭
𝑴𝑺𝒖𝒍𝒕 = 𝟏.𝟓×𝝈𝒕𝒖
𝒎𝒂𝒙
−𝟏
−𝟏
[3.1]
[3.2]
With a maximum stress of 25,817 psi, the margin of safety for the aluminum casing is
0.24 for yield strength and 0.01 for ultimate strength.
Figure 3.2 Maximum Stress Aluminum Engine Casing Upper
18
Figure 3.3 Maximum Stress Aluminum Engine Casing Lower
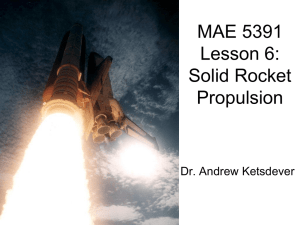
The predicted flight performances based on the total assembly weight and predicted
engine thrust is shown in Figure 3.4,Figure 3.5 and Figure 3.6. Figure 3.4 shows
ground distance covered by the cruise missile as it reaches the 1,000 foot target altitude.
This figure shows the transition from vertical to horizontal flight. This transition was
chosen to provide a smooth transition.
Flight Path
1400
1200
Altitude (ft)
1000
altitude (ft)
800
600
400
200
0
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Ground Distance (ft)
Figure 3.4 Assembly Flight Path
19
Figure 3.5 shows the thrust, altitude and the horizontal velocity over time. As shown,
the assembly reaches the target altitude of 1,000 feet at about 10 seconds and then
continues to accelerate until it reaches the target velocity of 807 ft/sec at 12.6 seconds.
The thrust shown in Figure 3.5 is predicted by BurnSim.
The thrust profile is
progressive since the burn rate accelerates with increased burn area and increased
chamber pressure. The thrust has a drop at approximately 9.6 seconds. The hypothesis
as to why this occurs is the propellant is divided into 3 stages in BurnSim. The bottom
stage is allowed to burn on the nozzle end which is open as shown in Figure 2.2. The
other two segments are prevented from burning on the ends. As the propellant is
consumed, the bottom charge is burning both axially and radially and eventually there
will no longer be an end face. At this point, the total burn area will drop, resulting in a
pressure drop which will result in a thrust decrease. This phenomenon can be further
explored with the aid of the software designer to verify accuracy.
Flight Performance
14000
1000
12000
Thrust (lb)
600
8000
6000
400
Altitude (ft) and Velocity (ft/sec)
800
10000
Thrust (lb)
altitude (ft)
horizontal velocity
(ft/sec)
4000
200
2000
0
0
0
2
4
6
8
10
12
TIme
Figure 3.5 Flight Performance
Figure 3.6 shows vertical and horizontal acceleration and altitude of the assembly in
ship’s coordinates with respect to time. These are contrasted with θ which is the angle
of the flight path with respect to the ground horizontal.
20
Flight Performance
90
1000
80
70
θ (degrees)
50
600
40
400
30
Altitude (ft) and Velocity (ft/sec)
800
60
θ (degrees)
altitude (ft)
horizontal velocity
(ft/sec)
vertical velocity
(ft/sec)
20
200
10
0
0
0
2
4
6
8
10
12
TIme
Figure 3.6 Rocket Angle, Altitude and Velocities
3.3 Composite Casing Design
The composite version of the engine casing has the same general shape as the aluminum
version but is made of wound fibers over a sand mold. The fibers are coated in an epoxy
resin. The thickness of the material is tailored to optimize the weight and strength of the
structure. For ease manufacturing and analysis, the casing is of uniform thickness.
3.3.1
Layup
The composite layup is [902/02/45/-45]s. Each layer is 0.006 inches thick. The sublaminate has 12 layers and the sub-laminate is layered 7 times. The engine casing is 0.5
inches thick made up of a total of 84 layers. The 0 degree orientation is in-line with the
casing axis but following the contour of the shell from top to bottom and the 90 degree
orientation is in the hoop direction. This layup will give strength in the hoop direction
for the pressure loading with the 90 degree fibers. The 0 and 45 degree fibers give the
laminate strength for bending in the curved geometry at the top and bottom of the casing
to react thrust load.
The overall properties of this layup are calculated using classical laminate plate theory.
The resulting three dimensional stiffness properties of the laminate as well as the
21
Poisson’s ratios are shown in Table 3.3. The stress allowable for this laminate would
ultimately be determined through physical testing of the laminate. The safety factors are
calculated based on the unidirectional material properties and CLT with Tsai-Hill failure
criteria.
Table 3.3 Laminate Properties Calculated by CLT
Ex
Ey
10^6 psi
10^6 psi
10.68
10.68
3.3.2
Ez
Gxy
Gxz
Gyz
10^6 psi
10^6 psi
10^6 psi
10^6 psi
1.73
2.54
0.53
0.53
νxy
νzx
νzy
0.20
0.38
0.38
Composite Casing Geometry
Based on the engine parameters shown in Table 3.1, an engine casing is designed and
optimized for weight based on the material strength as shown in Table 2.2. Figure 3.7
shows the final dimensions of the engine casing. Table 3.4 shows the final weight of the
composite engine casing assembly. Figure 3.7 shows the dimensions of the composite
casing. Due to the superior strength of the composite material over the aluminum, the
thickness of the structure is 0.5 inches throughout. Since the composites are lower in
density than the aluminum and the structure is thinner, the composite casing is lighter
even with the additional thrust plate hardware.
22
Figure 3.7 Composite Casing Detail
Table 3.4 Composite Engine Weight
Component
Weight (lb)
Engine Casing
97
Fuel
507
Liner/Filler
50
Nozzle
7
Thrust Plate
1
Total
662
23
3.3.3
Finite Element Analysis
A two dimensional axi-symmetric analysis is performed similar to the aluminum casing.
The two dimensional geometry is split into segments as shown in Figure 3.8 so that the
coordinates of the finite elements in the curved sections can be aligned with the
curvature of the geometry. This allows the material properties to be, as will the fibers,
aligned with the geometric curvature. The material stiffness properties as applied in
ANSYS are shown in Table 3.5. These values are the same as in Table 3.3 but
transposed to align with the coordinate system used in ANSYS. In the ANSYS model,
the hoop direction is the z-coordinate, the axial direction is the y-coordinate and the
radial direction or through thickness is the x-coordinate.
Throat Top
Radius
Throat
Bottom
Cone Radius
Barrel
Top
Cone
Top Radius
Bottom Radius
Figure 3.8 FEA Geometry for Composite Casing
Table 3.5 Laminate Properties in ANSYS
Ex
Ey
Ez
Gxy
Gxz
Gyz
6
10 psi
6
10 psi
6
10 psi
6
10 psi
6
10 psi
6
10 psi
1.73
10.68 10.68
0.53
0.53
2.54
νxy
νzx
νzy
0.06
0.06
0.20
Figure 3.9 shows the load and boundary conditions similar to that of the aluminum
casing shown in Figure 2.4. The additional remote displacement is used on the top
section of the casing to represent the bonded thrust ring shown in Figure 2.3. This
24
constraint prevents the edges of the top hole from expanding or contracting radially but
allows all rotations and axial displacement. Figure 3.10 shows the deformation of the
casing and Figure 3.11 shows the peak stresses in the top curved section. The peak
stresses occur in areas similar to the aluminum casing as expected. The margins are
calculated using Tsai-Hill failure criteria. A summary of the margin of safety is listed in
Table 3.6.
Figure 3.9 Load and Boundary Conditions Composite Casing
25
Figure 3.10 Maximum Total Deformation Composite Casing
Figure 3.11 Top Radius Stress Composite Casing
26
Table 3.6 Composite Casing Stress and Margins
Stress (psi)
Axial
Axial
Hoop
Hoop
Shear
Shear
min
max
min
max
min
max
Cone
-20144
-4729.2
-4897.3
-566.72
-312.46
794.8
2.081
Cone radius
-13465
-6717
-6074.4
-1876.2
-722.42
674.68
3.716
Nozzle
-9718.6
-8095.4
-2745.3
295.22
-426.46
183.22
5.415
-14915
24486
-413
28774
-2014.8
504.71
0.696
-13401
24279
15498
28629
-123.22
1809.9
0.718
-546.32
17727
3015.8
23340
-1188.7
1851.8
1.163
Barrel
3701.5
13574
13057
24296
-1144.8
1116.6
1.198
Top Radius
-14147
29048
2951.3
19953
-1482.9
1158.1
0.793
Top
-21888
34018
8241.7
40858
1248.8
5475.1
0.129
Location
Throat Top
Radius
Bottom
Bottom
Radius
Margin
The lowest margin in the composites is similar to that of the aluminum casing in the top
section which is reacting the thrust forces as well as internal pressures. These margins
include the temperature knock downs as well as the 1.5 safety factor. Since composites
behave as a brittle material in that they do not significantly plastically deform prior to
failure, only ultimate margins are calculated.
3.3.4
Aluminum to Composite Comparison
Comparing the total weight of the aluminum engine as shown in Table 3.2 to that of the
composite engine as shown in Table 3.4, the total weight savings is only 74 lb in an
assembly that weighs over 3,000 lb. As show in Figure 3.12, this weight savings has a
minor effect on the flight performance of the assembly.
27
Aluminum vs Composite Flight Performance
900
1000
800
700
800
500
600
400
400
300
200
200
100
0
0
0
2
4
6
8
10
12
TIme
Figure 3.12 Flight Performance Comparison
28
Horizontal Velocity (ft/sec)
Altitude (ft)
600
Aluminum Casing
Altitude
Composite Casing
Altitude
Aluminum Casing
Velocity
4. Conclusion
A rocket motor provides a great deal of power for a short duration of time. In this
project, a solid fuel rocket motor is designed to produce over 13,000 lb of thrust for
almost 13 seconds which is capable of lifting over 3,000 lb of mass to a height of 1,000
feet and accelerate it to over 550 mph. There are many options for size and shape of the
propellant which can have a great influence on the thrust profile. A simple cylindrical
propellant shape was utilized in this project for simplicity but other options can be
explored. The thrust profile is progressive in that the thrust increases with time. The
chamber pressure is a moderate pressure of about 1,000 psi. The pressure makes it
feasible to use metal alloy and composite casings. The advantage of the composite is the
high strength to weight which allows for weight savings. For this design, the weight
savings is only 74 lb in an assembly that weighs more than 3,000 lbs. This weight
savings provides marginal flight performance increase as shown in Figure 3.12. Further
refinements can be done for the composite casing design to decrease the thickness in
high margin locations.
Varying the thickness will require ply drop offs or fiver
terminations which requires special stress analysis. Overall, composites can be more
expensive and more technically challenging to manufacture than metal alloys. A further
cost and manufacturing analysis would need to be performed to determine if the use of
composites is justified.
29
References
[1] Newton, Isaac. The Mathematical Principles of Natural Philosophy, pg 19 1729
[2] "Solid Rocket Motor." Wikipedia: The Free Encyclopedia. Wikimedia
Foundation, Inc. 2 February 2012. Web. 19 May. 2008
[3] Sutton, George Paul. Rocket Propulsion Elements. New York: John Wiley &
Sons, 1992
[4] Ward, Thomas A. Aerospace Propulsion Systems. Singapore: John Wiley &
Sons, 2010
[5] Young, Budynas, and Sadegh. Roark’s Formulas for Stress and Strain. New
York: McGraw-Hill, 2011.
[6] Metallic Materials Properties Development and Standardization (MMPDS-05)
U.S. Federal Aviation Administration.
[7] Hyer, M. W., and S. R. White. Stress Analysis of Fiber-reinforced Composite
Materials. Pennsylvania: DEStech Publications, 2009
[8] Hexcel (2005, March) Prepreg Technology. Pg 26 Retrieved February 02,
2012, from http://www.hexcel.com/Resources/DataSheets/Brochure-DataSheets/HexForce_Technical_Fabrics_Handbook
30
Appendix A – Classical Lamination Matlab Code
%Tsai_hill_margin.m
%This program is to calculate the Tsai-Hill margin of a laminate from
FEA stress
%Assumption- all layers are at the same stress state in global
coordinates (not ply coordinates).
%Enter the sx,sy,sxy stresses from FEA for the LAMINATE and the
laminate thickness.
%Program will calculate the layer stresses and perform Tsai-Hill
calculation
clear all;clc;
Normalstressx=40858; %user input laminate stress
Normalstressy=34018; %user input laminate stress
Normalstressxy=5475.1; %user input laminate stress
plystacktheta=[90,0,45,-45,-45,45,0,90]; %user input ply orientation
plystackz=[.084,.084,.042,.042,.042,.042,.084,.084]; %user input of ply
thickness
graphitepolymer; %user input of ply material
h=size(plystacktheta,2); %determines how many layers
t=0; for n=1:h; t=t+plystackz(1,n);end; %calculates ply thickness
Nx=Normalstressx*t;
Ny=Normalstressy*t;
Nxy=Normalstressxy*t;
Mx=0;
My=0;
Mxy=0;
z(1)=-t/2; %sets z0 dimension (shifted +1 for matlab purposes)
for N=2:h+1
z(N)=z(N-1)+ plystackz(1,N-1);
end
for k=1:h
theta=plystacktheta(1,k)*pi/180;
Qbar=qbar(theta,E1,E2,poisson12,shear12);
for i=1:3
for j=1:3
Qbar3d(i,j,k)=Qbar(i,j);
end
end
end
A=[0,0,0;0,0,0;0,0,0];B=[0,0,0;0,0,0;0,0,0];D=[0,0,0;0,0,0;0,0,0];
for i=1:3
for j=1:3
for k=1:h
A(i,j)=A(i,j)+Qbar3d(i,j,k)*(z(k+1)-z(k));
B(i,j)=B(i,j)+Qbar3d(i,j,k)/2*((z(k+1))^2-(z(k))^2);
D(i,j)=D(i,j)+Qbar3d(i,j,k)/3*((z(k+1))^3-(z(k))^3);
end
end
end
31
for i=1:3
for j=1:3
ABD(i,j)=A(i,j);
end
end
for i=4:6
for j=1:3
ABD(i,j)=B(i-3,j);
end
end
for i=1:3
for j=4:6
ABD(i,j)=B(i,j-3);
end
end
for i=4:6
for j=4:6
ABD(i,j)=D(i-3,j-3);
end
end
ABD;
abd=ABD^-1;
e0k=abd*[Nx;Ny;Nxy;Mx;My;Mxy];
e0=[e0k(1);e0k(2);e0k(3)];
k=[e0k(4);e0k(5);e0k(6)];
for j=1:2:2*h %creates matrix with 2*h columns so to have top and
bottom values for each layer
jmod=.5*j+.5; %converts j back to j=1:h for layer properties
theta=plystacktheta(jmod)*pi/180;
epsilonxytop=e0+z(jmod)*k;
epsilonxybottom=e0+z(jmod+1)*k;
stiffness=qbar(theta,E1,E2,poisson12,shear12);
sigxytop=stiffness* epsilonxytop;
sigxybottom=stiffness* epsilonxybottom;
sig12top=tmatrix(theta)*sigxytop;
sig12bottom=tmatrix(theta)*sigxybottom;
epsilon12top=tmatrix(theta)*epsilonxytop;
epsilon12bottom=tmatrix(theta)*epsilonxybottom;
for i=1:3
stressxy(i,j)=sigxytop(i,1);
stress12(i,j)=sig12top(i,1);
strainxy(i,j)=epsilonxytop(i,1);
strain12(i,j)=epsilon12top(i,1);
end
for i=1:3
stressxy(i,j+1)=sigxybottom(i,1);
stress12(i,j+1)=sig12bottom(i,1);
strainxy(i,j+1)=epsilonxybottom(i,1);
strain12(i,j+1)=epsilon12bottom(i,1);
end
end
S =
compliancematrix(E1,E2,E3,poisson12,poisson13,poisson23,shear12,shear13
,shear23);
deltaH=0;
for i=1:2:2*h
imod=.5*i+.5;
32
epsilon3(imod,1)=S(1,3)*stress12(1,i)+S(2,3)*stress12(2,i);
deltah(imod,1)=epsilon3(imod,1)*plystackz(imod);
deltaH=deltaH+deltah(imod,1);
end
for i=1:2*h
if (stress12(1,i)<0)
X1=Fcu1;
else
X1=Ftu1;
end
if (stress12(2,i)<0)
X2=Fcu1; Y1=Fcu2;
else
X2=Ftu1; Y1=Ftu2;
end
S1=F12;
tsaihill(1,i)=(stress12(1,i)/X1)^2stress12(1,i)*stress12(2,i)/(X2^2)+(stress12(2,i)/Y1)^2+(stress12(3,i)/
S1)^2;
ms(1,i)=1/tsaihill(1,i)-1;
end
Ex=1/(abd(1,1)*t)
Ey=1/(abd(2,2)*t)
Gxy=1/(abd(3,3)*t)
poissonxy=-abd(1,2)/abd(1,1)
stress12
ms
epsilon3;
deltah;
deltaH;
epsilonz=deltaH/t;
poissonxz=-epsilonz/e0(1);
poissonyz=-epsilonz/e0(2);
33
%Graphitepolymer
E1=2.4656*10^7;
E2=1.305*10^6;
E3=E2;
shear12=638000;
shear13=shear12;
poisson12=0.27;
poisson13=poisson12;
poisson23=1-(E2/E1)*(1+(E1/(3.4*shear12)-1)*2*sqrt(2)*poisson12);
shear23=E2/(2*(1+poisson23));
Ftu1=208800;
Fcu1=139200;
Ftu2=6600;
Fcu2=21720;
F12=8280;
%compliancematrix.m
function [S] =
compliancematrix(E1,E2,E3,poison12,poison13,poison23,shear12,shear13,sh
ear23)
S=[1/E1,-poison12/E1,-poison13/E1,0,0,0;-poison12/E1,1/E2,poison23/E2,0,0,0;-poison13/E1,poison23/E2,1/E3,0,0,0;0,0,0,1/shear23,0,0;0,0,0,0,1/shear13,0;0,0,0,0,
0,1/shear12];
end
%qbar.m
function [qbar] = qbar(theta,E1,E2,poisson12,shear12)
S=[1/E1,-poisson12/E1,0;-poisson12/E1,1/E2,0;0,0,1/shear12];
Sbar(1,1)=S(1,1)*cos(theta)^4+(2*S(1,2)+S(3,3))*sin(theta)^2*cos(theta)
^2+S(2,2)*sin(theta)^4;
Sbar(1,2)=(S(1,1)+S(2,2)S(3,3))*sin(theta)^2*cos(theta)^2+S(1,2)*(sin(theta)^4+cos(theta)^4);
Sbar(1,3)=(2*S(1,1)-2*S(1,2)-S(3,3))*sin(theta)*cos(theta)^3-(2*S(2,2)2*S(1,2)-S(3,3))*sin(theta)^3*cos(theta);
Sbar(2,1)=Sbar(1,2);
Sbar(2,2)=S(1,1)*sin(theta)^4+(2*S(1,2)+S(3,3))*sin(theta)^2*cos(theta)
^2+S(2,2)*cos(theta)^4;
Sbar(2,3)=(2*S(1,1)-2*S(1,2)-S(3,3))*sin(theta)^3*cos(theta)-(2*S(2,2)2*S(1,2)-S(3,3))*sin(theta)*cos(theta)^3;
Sbar(3,1)=Sbar(1,3);
Sbar(3,2)=Sbar(2,3);
Sbar(3,3)=2*(2*S(1,1)+2*S(2,2)-4*S(1,2)S(3,3))*sin(theta)^2*cos(theta)^2+S(3,3)*(sin(theta)^4+cos(theta)^4);
qbar=inv(Sbar);
end
%tmatrix.m
function [T] = tmatrix(theta)
n=sin(theta);
m=cos(theta);
T=[m^2,n^2,2*m*n;n^2,m^2,-2*m*n;-m*n,m*n,m^2-n^2];
end
34