Team_03_DD_AB
advertisement

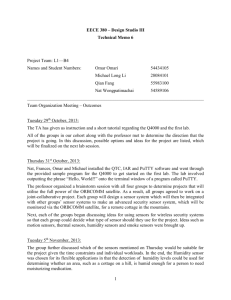
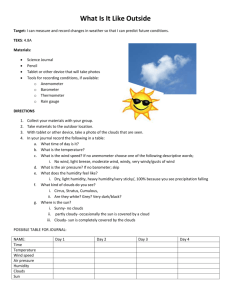
Fall Balloon Satellite Proposal Team: O2n Cloud 9 Team members: Ben Woeste, Brodie Schulze, Caitlyn Cooke, Ian Barry, Lea Harris, Megan O’Sullivan, and Sebastian-Johannes Lorenz ASEN 2500 University of Colorado at Boulder Professor: Christopher Koehler September 15th, 2010 10 Mission Statement The BalloonSat “Cloud 9“ will rise to an altitude near 30km in order to complete our mission. Our mission is to use this satellite to take 3D images of the clouds, measure relative humidity, and the levels of oxygen in the atmosphere. We will be using these sensors to come up with a composition of the atmosphere and compare our images to the relative humidity. Mission Objectives 1. Construct a BalloonSat by 10/21/2010 that will reach altitudes of 30km 2. We will measure the amount of elemental oxygen in the air using an oxygen sensor 3. Take 3D images of surrounding clouds 4. Measure the external relative humidity in the atmosphere Mission Overview Through scientific discovery we have an explanation for how clouds are formed and what they are made of. We know the environment needed for clouds to form and what types of clouds produce certain weather. The conditions needed for cloud formation are that there is high relative humidity, cooling atmosphere, and particles in the air for the water to condense onto. What we want to study is the relative humidity that is needed for clouds to form and with our oxygen sensor we will be able to read how much pure oxygen there is in the air. We can test and see if the level of pure oxygen in the atmosphere changes as we approach clouds. The other part of our experiment is to use 3D imaging in order to get a better idea of size and magnitude of the clouds. These images are going to be integrated into the other data so that we can correlate the amount of oxygen to the type, thickness, and altitude of cloud. The whole point of this experiment is to explore the effects of relative humidity and the composition of the atmosphere. Requirements for O2n Cloud Nine: Objectives: Collect Relative humidity to about 30,000 meters Collect oxegen levels to about 30,000 meters Collect temperature data to about 30,000 meters Take stereoscopic images. Requirement: Humidity sensor with power to keep it running for about 135 minutes Arduino board to collect humidity sensor data and Its power. Oxygen sensor , power to run it, HOBO to collect data. Eternal temperature probe and hobo, Camera with strategically placed mirrors, memory, Image processing. For the mission we will be flying a stereoscopic camera system, oxygen sensor, internal and external humidity sensors, and internal and external temperature sensors. We will also be flying an internal heater to keep the satellite at operating temperatures (0 degrees Celsius), and an Arduino board and HOBO data logger to store measurements. Gateway to Space Team O2n Cloud 9 2 Sep. 15th 2010 Mission statement Take 3D-images of the clouds Level 0 Take stereoscopic images Level 1 Camera with strategically placed mirrors, memory, Image processing. Measure the levels of oxygen in the atmosphere Compare Humidity levels to cloud presence Collect oxygen levels to about 30,000 meters Oxygen sensor , power to run it 135 minutes, HOBO to collect data. Humidity sensor power to run it for about 135 minutes, Arduino board to collect data. Measure temperature data as function of altitude. Collect internal and external temperature data to about 30,000 meters Eternal temperature probe and hobo to collect data Keep Satellite running Arduino Board, Camera need to be kept above 0 degrees Celsius Heater powered by 9 volt batteries to provide heat. Collect internal and external relative humidity to about 30,000 meters Technical Overview Structural – The structure of our BalloonSat “Cloud 9” is going to be in the shape of a rectangular prism. The structure will be about 30cm long, 10cm tall and 10cm deep. The reasoning behind the 30cm length will be explained in the optical section. The prism will be made out of foam core with aluminum tape and hot glue to hold the edges. One side of our prism will be at an angle so as to allow our camera to get a view of the top of the clouds. In order for our satellite to reach the target altitude we will be attaching it to a weather balloon by a nylon flight cord through an internal PVC pipe. We must also use insulation inside of our satellite because of the extreme cold temperatures reached throughout the flight. For this we will use a one-centimeter thick insulation glued on the interior of the structure and a heater. (The heater will be explained in the electrical part of the technical overview) Optical – Part of our experiment is to take 3D images of clouds throughout the flight. We will be using a digital camera in order to create an effect much like the eyes of a human to give us depth to pictures. The camera will be placed on one end of our structure and we will use angled mirrors to allow the camera to take one picture that views the outside from both ends of our structure, this will give us the ability to have two different angles of the same object. The camera will be placed at the back of the structure to leave room for the mirrors and any sort of glass will not cover the windows in the side of our structure. The effect of having an open-air design is that we have to protect our lens and mirrors from condensation. In order to stop water from condensing on our lens and mirrors we have to use an anti-fog agent. Gateway to Space Team O2n Cloud 9 3 Sep. 15th 2010 Electrical – The heater that we will make in class requires three nine-volt batteries and these will be mounted on the inside of our structure. The heater will be placed in the structure so that the electrical components do not get colder than -10 degrees Celsius. This subsystem is independent of all of the others and is only wired to a switch that is on the outside of our structure so that we can power it on and off. The next subsystem we have to have power for is our HOBO data logger. This subsystem has an internal power source that will last for hours, but in order to make sure that it does not run out of battery mid-flight we will program it to delay the start of data collection until the launch. This system logs the data of outside temperature, inside temperature, inside relative humidity, and in our experiment will also log the oxygen level. The oxygen sensor will be hooked up to a 4-20mA connection. The power of this system comes from two nine-volt batteries that will be mounted inside our structure. The next subsystem is our camera. We will use our mirrors in order to get one picture from two angles. The camera will be using a 4Gb memory card and has a internal rechargeable battery. The last subsystem is our external relative humidity sensor. This is connected to an Arduino Pro board in order to log our data. The power will come from a nine-volt battery. We will also wire in a switch so we can turn it on before launch. Hardware we need and where we plan to get it Oxygen Sensor donated by In-Situ Inc. HOBO provided by Gateway to Space class Camera donated by Gateway to Space class Mirrors bought from Home Depot Relative humidity sensor from Sparkfun Electronics Arduino Pro board from Sparkfun Electronics 1 2Gb memory card donated by Gateway to Space class 6 nine-volt batteries provided by Gateway to Space class 4-20mA cable from HOBO Onset Corporation Plastic flight tube provided by Gateway to Space class Foam core provided by Gateway to Space class Aluminum tape provided by Gateway to Space class Washers and bolts for flight tube and rope attachment provided by Gateway to Space class Heater provided by Gateway to Space class Insulation provided by Gateway to Space class Switches provided by Gateway to Space class Illustration and Special Features of our Design The team’s design includes a digital camera with a system of angled mirrors, which will allow for stereoscopic imaging and provide some sense of depth in the images Gateway to Space Team O2n Cloud 9 4 Sep. 15th 2010 of clouds obtained. The slanted side on which the mirrors are mounted will allow the camera to point downward toward the clouds in the troposphere for a longer interval. There is an oxygen (O2) sensor and a relative humidity sensor that will take measurements outside the structure. These features allow for correlations to be drawn between humidity, oxygen levels, cloud appearance, temperature, and altitude. Gateway to Space Team O2n Cloud 9 5 Sep. 15th 2010 How we plan to turn our design into an actual satellite The satellite will be comprised of two separate systems, one of which will collect qualitative data and one of which will collect quantitative data. In addition, we will have a satellite support system. Qualitative System: Optical camera system The satellite will contain a digital camera, which will have a primary goal of capturing images of the clouds at various altitudes during flight. We will have an internal mirror system to allow a single camera to capture two angles. The separation of the windows in the side of the structure that the mirrors will be placed in will be 30cm. This separation distance is optimized in order to create a focal 3D distance of 17.7 m. The camera will contain and internal rechargeable battery that will provide power to the system. The camera firmware is also equipped with an internal timing system that will control the photo-sampling rate and an internal memory card for data storage. The simultaneity of image generation from the two angles will allow a 3D image to be viewed by placing the two printed photos into www.start3d.com, which creates transition slides and then animates this. The focal distance and sampling rate accuracy will be tested prior to launch using the website to ensure clarity of the 3D images. If the 3D picture quality is not optimized, the mirror system within the box and internal timing system will be revised accordingly. An external switch located outside of the satellite structure will activate the system proceeding launch. Gateway to Space Team O2n Cloud 9 6 Sep. 15th 2010 Quantitative System: HOBO data-logging system The quantitative system consists of the HOBO data logger. This unit is equipped with internal temperature, internal relative humidity, and external temperature capabilities. The HOBO data logging system also includes it’s own internal power source. In addition to these given parameters, the team is also planning to record oxygen content of the atmosphere. In-Situ Inc will donate the oxygen sensor, called an RDO Pro optical oxygen sensor. The company was excited to donate a sensor to an educational program and will use our data for a technical application note for marketing purposes. The oxygen sensor is equipped with customizable 4-20mA output capabilities that are compatible with the HOBO data-logging device. This will be wired to the HOBO’s 420mA cable, equipped with specialized 10K ohm resistor to adequately control current input from the oxygen sensor. The system will also be wired to a 9V battery, which will power the RDO Pro device. The RDO Pro is equipped with a specialized current output control chip (datasheet: xtr 117) that regulates the current being sent to the HOBO device. If the sensor unexpectedly produces a current above 25mA, the output regulator will essentially deactivate the entire system. With a 10K ohm resistor in the system, the maximum voltage that can be obtained by the system is 2.5V, which is the HOBO allowed specification. Thus, the HOBO data-logging device is incapable of being exposed to an overvoltage due to the RDO Pro optical oxygen sensor. The sampling rate of the HOBO and it’s corresponding sensors will be controlled using the HOBO software, while the oxygen sensor sampling rate will be customized using the Win-Situ 5 software, provided by In-Situ Inc. The data will be collected and recorded within the HOBO datalogging device’s internal memory for the duration of the mission, and downloaded after landing for analysis using the provided HOBO software. The team will do a full testing analysis before launch to determine the overall functionality of the device, as well as the accuracy of the sensors. The system design will be modified accordingly to account for any errors. An external switch located outside of the satellite structure will activate the system proceeding launch. We also have a relative humidity sensor that will be mounted on the outside of our structure. This relative humidity sensor will be connected to an Arduino Pro board to log our data. We will power it by using a nine-volt battery because the sensor is a five volt sensor. - Satellite Support System: Heating, insulation, and condensation To ensure performance of both the qualitative and quantitative systems, an optimized environment will be achieved using the satellites internal support system. A heater will be provided to the team, consisting of an external switch for system activation prior to launch, and three 9V batteries to power the heating device during flight. Onecentimeter foam insulation will also be provided to line the satellite structure and maximize heat efficiency. A desiccant in a bag will be donated by In-Situ Inc. and placed inside the satellite structure to absorb moisture accumulation. Revisions to the internal heating system will be made if the target temperature of -10 degrees Celsius is not achieved. Gateway to Space Team O2n Cloud 9 7 Sep. 15th 2010 Data Retrieval Satellite data retrieval will be presented in both a qualitative and quantitative form. All data will be collected for the entire ascent and decent of the flight. For the qualitative analysis, the two installed cameras will take simultaneous images of the clouds during flight. The camera images will be stored in the internal memory card for the duration of the flight. After recovery, the images from both cameras will be printed and matched with the simultaneous image from the opposite camera. The fixed sampling rate during flight will allow the cameras to take images simultaneously, and at various altitudes along the flight path. The two matching images will be placed into a website, which creates transition slides and animates them. This 3D representation will give the team a qualitative analysis of the cloud density at various altitudes above the Earth. The quantitative data analysis will consist of numerical measurements using the various sensors attached to the HOBO data-logging device. Four sensors will be connected to the HOBO including internal and external temperature, internal humidity, and oxygen concentration. All data collected by the sensors will be logged within the HOBO’s internal memory system. After recovery, the data will be downloaded from the HOBO’s internal memory to a computer using the HOBO software. The two temperature sensors will report data in the units of Celsius, and the humidity sensors in units of density. The oxygen sensor however, will report the concentration of oxygen in units of voltage, due to the 4-20mA connection. The oxygen data will be converted from voltage to partial pressure of oxygen by application of Ohm’s Law V=IR. Using the known value of resistance R (10k ohm) and the measured voltage, the current can be found for each sample logged. The minimum and maximum current levels will be assigned a partial pressure of oxygen value using the Win-Situ software provided by In-Situ Inc. Thus, every current level on the scale from 4-20mA will correspond to a specific value of oxygen partial pressure, which will be computed using a simple algebraic ratio. Internal humidity readings will be evaluated to determine the efficiency of the moisture absorption system, and internal and external temperature readings will be compared to determine the heater efficiency. We will calibrate the sensor by placing it in a sample of water and saturating with 100% oxygen using a bubbler. The data for the relative humidity sensor will be recorded on our Arduino Pro board. The data will be recorded in voltage readings that correspond to percent humidity. The whole system is very similar to the oxygen sensor in data retrieval. How we will keep people from getting hurt We will take a number of safety precautions during all construction times and tests. During construction, if we are using power tools we will wear safety goggles and make sure that all blades are kept away from hands. We will also be using exact-o knifes in our construction, so we will always make sure to cut away from ourselves and others so the knife doesn’t slip and injure someone. We will be implementing several different tests that have fairly standard safety precautions. One safety precaution that is essential is a warning system that the test is about to begin. The tester will ask if the other team members are ready, and upon confirmation the tester will loudly announce the name of the test and a countdown so all that are in earshot know the test is taking place and know to stand clear of the test site. A safe distance for most tests we will be performing is about a 5m radius. This safety radius however should be increased to about 10m for the drop Gateway to Space Team O2n Cloud 9 8 Sep. 15th 2010 test, noting that the wind might carry the test satellite or pieces could come off and injure someone. Other team members not performing the test will also watch for people passing by and make sure that they know that a test is taking place and to stay away from the test site. Another way to keep the team and others safe is to perform tests in a non-populated area. Basically the key to being safe during testing and construction is to not do anything foolish and use common sense, but having these safety procedures laid out ahead of time will also help ensure team and passerby safety. We will have two or more team members present at all times. Functional Block Diagram Gateway to Space Team O2n Cloud 9 9 Sep. 15th 2010 Testing of our design There are several tests that must be done on our BalloonSat to ready it for flight. Here we will give a description of each and how the data they give us will help ready our satellite for flight. During all of the tests that involve the structure strength we will simulate the mass by placing rocks or other weights inside. -The Drop Test: One stage of this test is dropping our structure down a flight of stairs to simulate the impact on the structure as it hits the ground when it lands. This stage will tell us if our structure can withstand an impact that makes the structure roll across the ground. The second stage of this test is dropping it off a second story ledge to simulate the impact of the landing. This test will be done with mass simulation to test the strength. We expect our structure to survive the drop with little to know damage. -The Whip Test: In this test we will attach a flight string to our satellite and swing it around in circles. This test will tell us two things, one if our flight string interface is strong enough to endure the forces that will be exerted on it from the fall back to the ground. It will also tell us if our structure can withstand the forces acting upon it when if falls, or if it will rip apart. This test will be done with mass simulation to test the strength. We expect that the structure will last the force and that the flight tube will stay in place. -The Cooler Test: In this test we will be testing our internal technology and our insulation to see if it will withstand the extreme cold of high altitude. We will place our satellite with all of our technological components inside a cooler with dry ice in it, turn on our satellite, and see if the internal temperature will stay above -10 degrees Celsius with our heater and insulation in affect. The satellite will stay in the cooler for about 135 minutes to simulate the estimated time that the satellite will be exposed to the extreme cold temperatures of high altitude. We expect it to fully function after the 135 minute in the cooler and that the temperature will never drop below -10 degrees Celsius. -Camera Test In this test we will ensure that our 3D picture taking idea can work, and we will test all the software needed to make the 3D image. We will take our camera and mirrors, that are about 30cm apart, and test by taking pictures. Our object will have to be about 17.7 meters or more away, since that is our estimate of how far away some clouds will be from our satellite in flight. Then we will take our pictures and test our software to make sure that the 3D image will come out, or if we need to adjust our camera distances to ensure a better 3D picture. We expect to get two angles in a single picture and us the two angles to create the animated gif file to give the appearance of depth. -Oxygen Sensor Test We will test our oxygen sensor by placing it in our satellite and see if it is taking readings. It will be placed in a sample of water to check for accuracy. We expect the oxygen reading to be 100% when submerged in the water and an oxygen bubbler. Gateway to Space Team O2n Cloud 9 10 Sep. 15th 2010 -Full Mission Simulation: We will also test our satellite as a whole, to make sure that all the components work together. This test will also show if all components work properly in our structure. We expect everything to work and give accurate readings at ground level. Budget and Weight Overview We shall keep our budget by minimizing the cost of all the supplies we require. This can be accomplished by shopping around to find the best value for the components we need. Another step we will follow to avoid going over budget is by prioritizing, and going through an approval process for all purchases outside what is built into our budget and the Ben Woeste will control the purchasing power. Item O2 Sensor 4GB memory card Glass cutter Mirror 4 to 20 amp cable with built in resistor Arduino Pro 328 3.3V/8MHz Humidity Sensor - HIH-4030 Breakout Total Camera HOBO Heater Oxygen Sensor Additional power Foam Core Aluminum tape Flight tube Mirrors Humidity Sensor - HIH-4030 Breakout Arduino Pro 328 3.3V/8MHz Total Gateway to Space Team O2n Cloud 9 Cost ~$2250 Donated $ 29.99 Donated $ 3.79 $ 9.99 $ 34.00 Subtotal $ 0.00 Purchase Location In-Situ Inc $ 0.00 Brodie Schulze $ 3.79 $ 13.78 $ 49.78 Home Depot Home Depot Onset $ 19.95 $ 69.73 Spark Fun $ 16.95 $ 86.68 Spark Fun Weight (g) 132 30 100 150 228 60 5> 5 50 3 $ 86.68 Subtotal (g) 132 162 262 412 640 700 705 710 760 763 10 773 773 11 Sep. 15th 2010 Expected Results We have several sensors on our craft that we expect results from, our oxygen sensor, our humidity sensor, our optical sensor (3D Images), and Big Green Spacegasm’s CO2 sensor. From our oxygen sensor we expect to find an inverse relationship between oxygen levels and elevation. This is expected because it is already scientifically proven that oxygen levels decrease, as you get higher in altitude. From our humidity sensor we also expect to find an inverse relationship between humidity levels in the atmosphere and elevation. We assume this because we know that, as you get higher in the atmosphere you begin to see less clouds, and since clouds are condensed water vapor or water crystals we can conclude that humidity decreases as elevation increases. This can also be complimented by our optical sensor (3D images), which we expect to show that cloud existence will decrease with altitude. We will also be receiving data from team Big Green Spacegasm’s CO2 sensor. As with the other two, we expect to find an inverse relationship between carbon dioxide levels in the atmosphere and elevation. All these expected results are based off of prior scientific knowledge. Our results may vary depending on the maximum elevation we reach. Schedule Date 10/5/2010 10/6/2010 10/7/2010* 10/8/201010/13/2010 10/14/2010* DTL Event/Deadline 32 Pre-Critical design Review DD Rev A/B and CDR Presentations Due 31 30 Pre-Critical design Review 29 Cloud Nine stage First Build 23 First Build First Build Whip, Drop, Stair, Chill, Optical tests Design Review 10/15/201010/20/2010 10/21/2010* 22 Second Build 16 10/22/201010/24/2010 10/25/2010 15 Second Build, Design Complete All tests 12 All tests complete 10/26/2010 11 Pre-Launch Inspection, Bring All Hardware 10/27/2010 10 LRR presentations, DD Rev C drafting LRR presentations, DD Rev C drafting, and Data Analysis LRR presentations, DD Rev C drafting, and Data Analysis LRR presentations, DD Rev C drafting, and Data Analysis 10/28/2010* 10/29/201011/1/2010 11/2/2010 11/5/2010 11/6/2010 11/9/201011/11/2010 11/12/201011/19/2010 11/20/201011/28/2010 11/29/201012/4/2010 12/4/2010 9 In class Mission Sim, Bring Ready to go Balloon Sat 8 4 Launch Readiness Review, LRR presentations, DD Rev C Due 1 Balloon Sat Weigh in, Balloon turn in by 2PM, LRR cards Due 0 Launch! -3 Bring Raw Flight data -6 Data Analysis Data Analysis and final presentation drafting -14 Fall Break -23 DD Rev D Drafting -28 9-4 ITLL design Expo, DD rev D due @ judging Team video due @ judging DTL = Days to launch * Weekly meeting Gateway to Space Team O2n Cloud 9 12 Sep. 15th 2010 Organizational Flow Chart Lea Harris (612-730-3570) Lea.Harris@colorado.edu - Team Leader and managing director of the teams, coordinating the team and helping in any of the building, structure, electric, or science teams. Ian Barry (970-372-7883) Ian.Barry@colorado.edu -Head of Structures team, designing the basic plot of the structure and the technical design of how to make our satellite fit to the double camera and multiple sensors. Ben Woeste-(303-257-6931) Ben_woeste@yahoo.com Head of the Optical team. Researcher and head of the optical design team for the satellite’s 3-D picture data and constructing the plans for the space inside our box to put the cameras. Brodie Schulze-(970-629-3832) Keegan.Schulze@colorado.EDU Head of the Power Team. He will be controlling the research and construction of how the three sensors will be connected to batteries, the two cameras, and the thermal heater. One job will be helping the structures team to place the power components in the satellite. Caitlyn Cooke-(530-249-2354) Caitlyn.Cooke@colorado.EDU Head of the Electrical team that connects the Oxygen sensor to the HOBO sensors and the two cameras to the power. Caitlyn is also the main Software Head for the specialized sensor that requires special data retrieval. Gateway to Space Team O2n Cloud 9 13 Sep. 15th 2010 Sebastian-Johannes Lorenz-(303-618-3160) SebastianJohannes.Lorenz@colorado.edu Head of the Thermal Crew. Designating where and how we wish to use the thermal temp controller. Designing the cold tests, and making sure each subsystem is safe while in flight. Megan O’Sullivan- (832-656-9096) megan.a.osullivan@colorado.edu Head of the Health/Safety and Science crew. Megan will be the safe keeper on hand, with help from Lea to control all possible injuries or stress factors. Megan is also the Head of the Science Research to control our satellite’s main systems. This subject is the outer science research that will link all of the different crews together to construct the details of the satellite that don’t fall under the Electric, Optical, Managing, Thermal, and Structural teams. Gateway to Space Team O2n Cloud 9 14 Sep. 15th 2010