Additional Information Regarding Stress Modeling of Fault
advertisement

Appendix R6, Fault-to-Fault Rupture Probabilities
By Glenn Biasi, Tom Parsons, Ray J. Weldon II, and Timothy E. Dawson
University of Nevada, Reno
US Geological Survey, Menlo Park
University of Oregon, Eugene
California Geological Survey, Menlo Park, California
Introduction
Fault-to-fault rupture refers to how ground ruptures negotiate gaps and
geometric complexities at physical discontinuities in the fault system. The inclusion
of the possibility of fault to fault jumps is new compared to UCERF-2 (Field et al.,
2009), in which rupture was constrained to segments determined a priori.
Probabilities of fault-to-fault rupture are used in the UCERF-3 Grand Inversion as a
priori weights favoring some ruptures over others on the basis of physical or
empirical likelihood considerations. This report describes fault-to-fault rupture
probabilities coming from three sources, empirical observation, generalized
physical models, and Coulomb stress interactions.
This problem has been studied by many previous researchers. Harris and Day
(1993) found ruptures jump up to 5 km in dilational steps, but only half that for
compressional steps, and that the jumping distance depends weakly on stress drop.
Harris and Day (1999), Oglesby (2005, 2008), and Lozos et al. (2011) studied
various aspects of jumping dynamics as a function of geometry, separation, and
principal stress orientation. Linking faults increase the separation distance across
which rupture can continue (Lozos et al, 2011). Steep slip gradients at fault ends
near steps tend to promote fault-to-fault jumps (Oglesby, 2008). The role of fault
bends on rupture dynamics and continuation has been studied by Harris et al.
(1999), Aochi et al. (2002), Kame et al. (2003), Kase and Day (2006), and Lozos et al.
(2011).
Well-mapped surface ruptures provide an empirical basis for developing faultto-fault rupture probabilities as a function of separation distance and rupture style.
We examine three sets of empirical data. One is the relatively well known strike-slip
set from Wesnousky (2008; henceforth, “W08”). We also develop fault-to-fault
measures for the reverse and normal mechanism events of W08 and add fault-tofault data from a new set of earthquakes developed for UCERF-3 and described in
Appendix R1.
In UCERF-3, faults from the state-wide Community Fault Map are discretized
into sections each with a width equal to half the depth of the seismogenic layer of
the crust. The smallest rupture considered in the Grand Inversion consists of two
such sections. Slip on each section is constant. The level at which faults are
summarized means that many smaller-scale details cannot be included, notably
including slip and slip-rate tapering into fault terminations.
Probabilities of fault-to-fault rupture contribute in another way to the Grand
Inversion. Fault section interactions is considered sufficiently improbable, with the
1
ruptures that use them, can be removed before ever being input to the Grand
Inversion. Some screening of the rupture pool is required to keep the number of
possible ruptures within practical bounds for inversion. Mechanical inconsistencies
of fault section interactions are discussed as a means of addressing this need.
Empirical Fault-to-Fault Probabilities from Steps in Strike-Slip Faulting
We consider first fault-to-fault jumping probabilities based on an ensemble of
well-mapped surface ruptures. If the ensemble is large enough, it may be
considered representative of the likely range of fault behaviors. Wesnousky (2008)
studied 37 surface faulting ruptures, twenty-two of which were strike-slip events.
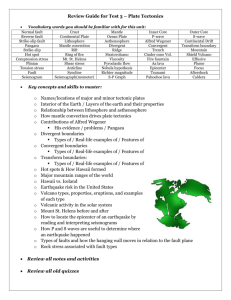
The strike-slip subset was examined in two ways (Figure 1). In the first way, which
may be called, “look inside”, we ask, how often do ruptures include one step-over?
or two? etc. In a second approach, “look at ends”, we ask, how often do ruptures
stop at fault steps and fault ends? For both inquiries steps are counted if the surface
trace is discontinuous by a kilometer or more. How fault traces continue at depth is
not considered and, in most cases, not known.
Figure 1: Example surface rupture for the 1942 Erbaa-Niksar, Turkey event. This event has
three interior steps of >1 km in width, and both ends are at discontinuities in the fault trace.
The “look inside” approach counts interior steps as indicated by the green ellipses; ends are
marked with red ellipses.
Look Inside
The “look inside” counting approach yields two relevant observations. First,
the number of interior steps no clear dependence on rupture length (Figure 2). That
is, long ruptures are not more likely to have multiple steps than are short ruptures.
We may speculate that longer ruptures occur on larger, more mature faults that
have worked out many steps in the process of lengthening and accumulating greater
net offset.
Figure 2. The number of steps in 22 strike-slip ruptures from Wesnousky and Biasi (2011) is
plotted versus surface rupture length. Numbers beside points are event numbers in W08. The
open circle on event 34 (1999 Izmit, Turkey) is an alternative length accounting for the
underwater portion of the event. These data indicate that longer ruptures do not necessarily
have more steps.
2
Second, the data in Figure 2 can be
recast to suggest the probability that
some number of steps will be found in a
strike-slip rupture (Figure 3). About
half of the ruptures have no steps.
About half of the remainder have at
least one. In this data set none had
more than three steps.
Two probability distributions
were fit to these data. The Poisson
distribution corresponds to steps
occurring at random inside strike-slip
ruptures at a mean rate of 1.05 steps
per rupture. Physically this distribution
may be interpreted as coming from a stress regime with a scale length of the full
rupture, and steps are bridged as required if they happen to fall inside that scale
length.
Figure 3: Histogram of numbers of ruptures with a given number of steps. Best-fit
Poisson and Geometric probability distributions are also shown. There is no statistical
basis to prefer one model over the other. Fitting parameters and their 95% ranges are
given in Table 1. Figure and Table 1 from Wesnousky and Biasi (2011).
3
A Geometric probability distribution models fault steps as trials met with some
probability of passage p. The number of steps crossed in a randomly chosen rupture
is thus (1-p)n. For W08 strike-slip ruptures the probability of crossing a step-over is
about 50%, corresponding to counting tosses of a fair coin and stopping on the first
“tail”. For example, with 3 or more steps are .125 as probable as those having none.
Physically, the Geometric distribution conforms to the intuition that steps require
some threshold of conditions to cross perhaps in rupture velocity or stress regime.
Although no cases of 4 or more steps occur in the W08 strike-slip data set, both the
Poisson and Geometric distributions provide some non-zero probability for these
cases.
Look at Ends
We may also look in the empirical data for where fault ruptures end. For this
sub-study, only 21 of the 22 strike-slip events in W08 could be used, the one being
excluded because geologic mapping around the ends of the rupture is too poor to
categorize the result. For five of the 21 ruptures, neither end of the rupture stops at
a fault end or step; nine have one such ending, and seven have two. Table 2 shows
these results as fractions of the total. Also in Table 2 are predicted fractions if the
probability of passing a step on the end is 0.5 and steps are reached on both ends.
As was the case for the “Look Inside” approach, steps become ends of ruptures with
a probability of about 50%. About ¾ of W08 strike-slip ruptures have at least one
end at a step-over or fault termination. This ratio may be used to compare with
inversion outputs.
Table 2. Fraction of ruptures with ends at map-scale discontinuities.
Table 2
Neither end One end
Both ends
At least one end
Number (total=21)
5
9
7
16
Fraction of total
.24
.43
.33
.76
Predicted at p=0.5
.50
.25
.75
Empirical data suggest that to a point, step size may not matter for the
probability of crossing. Figure 4 (Wesnousky, 2006) shows rupture terminations as
a function of step size. There are more small steps than larger ones, but up to 4 km
the fraction passing appears not to be a function of the size of the step (Figure 5).
4
Figure 4: Ruptures passing and stopping at steps are binned by distance. More small steps are
noted than larger ones, but up to 4 km the fraction through which rupture continues appears
not to be a function of the step size.
Figure 5. Probability of passing a step of a given width for empirical data in Fig. 4. The
exponential probability model (Shaw and Dieterich, 2007, discussed below) is also shown.
Empirical Fault-to-Fault Probabilities from Branching and Changes in Sense
5
We may ask how frequently fault-to-fault ruptures occur in the sense of
branching at high angles to the main trace or otherwise not being a simple extension
of the primary rupture. For this survey ruptures with small displacements and net
lengths less than ~15 km or with conspicuous mechanical complexities are not used.
Naming differences alone were not considered sufficient to count as fault-to-fault
cases. Data are from W08 and an additional set developed for UCERF rupture
length-average displacement regression (Biasi, Weldon, and Dawson, Appendix R1;
“BWD12”).
Ruptures from W08 counted as fault-to-fault cases:
1896 Rikuu, Japan (reverse): The Kawafune section is ~12 km distant from the
main rupture and opposite in vergence. Two reverse-reverse (r-r) jumps
are noted.
1915 Pleasant Valley (normal): Rupture links four sections in an en echelon
pattern oblique to the fault strikes. Three normal-normal (n-n) jumps.
1954 Fairview Peak (normal): One n-n jump from the Monte Cristo to the
Fairview fault across a >10 km releasing step at the southern end.
Dominant strike-slip on the Fairview fault changes trend and transitions
to two 5 km normal splays, where the rupture ends (ss-n). Other steps to
smaller rupture traces are noted.
1959 Hegben Lake (normal): The Red Canyon fault trace bends toward the
Hegben fault, and would join at 65 degrees from it if the Red Canyon trace
continued another kilometer (n-n).
1983 Borah Peak (normal): Main rupture splays 45 degrees continuing as two
normal offsets with a 5 km gap in the main trace at the point of the splay
(n-n).
1988 Tennant Creek (reverse): Ruptures of opposite vergence are separated by
a 6 km step (r-r).
1992 Landers (SS): Rupture on the Johnson Valley fault jumped on a structure
30 degrees oblique it to reach the Homestead Valley fault (ss-ss).
Homestead Valley-Emerson counted only as a step.
2001 Kunlun (SS): West end of rupture follows a SS splay 20 degrees from the
main trace (ss-ss)
2002 Denali (SS): Rupture started on the Susitna Glacier thrust fault (r-ss), and
followed the Totchunda splay instead of staying on the main trace of the
Denali rupture (ss-ss).
The normal and reverse mechanism ruptures of W08 are summarized in Table 3. It
is clear that the sizes of the steps crossed by normal and reverse mechanism
ruptures are much greater than for strike-slip ruptures. Strike-slip rupture steps
and gaps are in W08 and Wesnousky (2006).
Table 3 Normal and reverse mechanism events in W08
Event
Style
End
End
Nsteps
Step
Fault-to-fault
Size, km jumps and
6
2
2
8
12
4
4
7
-
Branches
None
r-r
r-r
n-n
n-n
n-n
None
1
1
2
10
3
1
3
5
n-n
ss-n (2)
None
n-n
Unclear
1?
1
None
Unclear
Unclear
Open
Unclear
Open
Unclear
Unclear
Open
Unclear
Faults end
0
1
0
5
None
n-n
None
-
Unclear
Unclear
1
4
2
3
3
1.5
3
6
1887 Sonora
1896 Rikuu
N
R
Nd
Fault
ends
Nd
Open
1
3
1915 Pleasant
Valley
N
Fault
ends
Fault ends
3
1945 Mikawa
R(1)
N to
SS
Offshore,
unknown
Fault ends
at 5 km
step
0
1954 Fairview
Peak
Fault
ends
Open
1954 Dixie Valley
1959 Hegben
N
N
Open
Open
1971 San
Fernando
1979 Cadoux
1980 El Asnam
1983 Borah Peak
1986 Marryat
1987 Edgecumbe
R(1)
Open
Fault
end, 9
km step
Unclear
R(1)
R
N
R
N(1)
1988 Tennant
Creek
1999 Chi Chi
R
4
r-r
R
Fault
Ends at
0
None
ends
cross fault
(1) Rupture too short or too irregular to include. (2) Minor normal splays (~5 km).
Other surface ruptures with fault-to-fault jumps:
1905 Bulnay (SS): Teregtiin forks at 20 degrees, increasing to 60 degrees, from
the main trace south for 70 km, right-lateral strike-slip offset. A second
SS rupture, the Dungen, is 30 km long and joins at 90 degrees (!). The
Dungen is located near where the Tsetserleg trace joins the Bulnay
rupture. The Tsetserleg earthquake occurred 2 weeks before Bulnay and
likely influenced this geometry. Both secondary ruptures are consistent
with a maximum deviatoric stress direction near N30E (2x ss-ss).
1931 Fuyun (SS): One clear jump, 45 degrees onto a thrust structure ~10 km
long. Displacement on the thrust is small enough that the main trace
7
displacements continue approximately constantly. One splay of 10 km to
a strike-slip fault. Both features are secondary and appear to relieve
fault-normal stresses (ss-r; ss-ss).
1957 Gobi-Altai (SS): Off-main ruptures have several meters of displacement.
One with ~4 m displacement is 32 km long joins as SS at 90 degrees (ssss) then hooks 90 degrees to become a thrust at a 40 degree dip; another
70 km long joins the main trace at an angle of 70 degrees as a thrust fault
dipping about 49 degrees (ss-r).
2008 Wenchuan (thrust): major duplexing of rupture – 72 km long Pengguan
trace, 10 km from main trace (r-r). Transitions from reverse-oblique to
SS from south to north, but not as a fault-to-fault rupture.
The complete list of BWD12 events is in Table 4.
Results for the W08 and BWD12 event collections are in Table 5. Table 5 shows
that fault-to-fault jumping is more likely for normal and reverse faulting events than
for strike-slip ruptures. To the extent that they can be compared, W08 and BWD12
event sets yield similar patterns. Less than 1 in 5 strike-slip ruptures includes a
fault-to-fault jump or significant splay, whereas normal and reverse mechanism
events jump or branch at 2-3 times that rate.
Table 4: Step Widths and Fault Branching for Events in BWD12
Event
1872 Owens
1905 Bulnay
Style
SS
SS
End
Nd
Nd
End
Nd
Nd
Nsteps
Nd
Nd
Step Sizes
-
Branches
Nd
ss->ss
ss->ss
r->r
None
1911 Chon Kemin
1920 Haiyuan
Rev
SS
Nd
Nd
Nd
Nd
1(1)
4+
1923 Luohuo
1931 Fuyun
SS
SS
Nd
Nd
Nd
Nd
Nd
Nd
9 km
>1 km
releasing
-
1937 Tuosuo
SS
Open
1
5 km
releasing
1957 Gobi-Altai
SS
20 deg
change in
strike
45 deg
trend to
thrusting
4+
-
ss-r
ss-ss
1963 Alake Lake
SS
Open
0
-
None
1970 Tonghai
SS
Nd
Trend
change
into
thrusts
20 deg
change
in strike
Nd
3
None
1973 Luhuo
SS
Nd
Nd
0
1.5 km;
1.5 km
1.5 km
-
Nd
ss->r
ss->ss (2)
None
None
8
1976 Motagua
1995 Sakhalen
1997 Manyi
2003 Altai
2005 Pakistan
2008 Wenchuan
2008 El Mayor
2008 Darwin
SS
SS
SS
SS
Rev
Rev
SS
SS
Nd
Nd
Nd
Nd
Nd
Nd
Open
Nd
Nd
Nd
Nd
Nd
Nd
Nd
Open
Nd
0
0
Nd
Nd
1
2
0
2
None
None
Nd
None
2 km
None
r-r
None
1.5 km;
None
1.5 km
Nd: no data. (1) also a 24 km gap in the surface trace. (2) Accommodation structures 10 km
in length.
Table 5. Incidence of fault-to-fault rupture by main trace rupture style. Normal and
reverse mechanism events have a higher incidence of fault-to-fault rupture.
Style
W08 Use F2F Fraction BWD12 Use F2F Fraction Fraction,
total (1)
Events (2)
Combined
Set
Normal 7
6
4
0.67
0
0.67
Reverse 8
5
2
0.40
3
3
1
0.33
0.38
SS
22
21
3
0.14
16
13
3
0.23
0.18
(1) Excludes events 11, 13, 19, 20, and 27 from W08 Table 1.
(2) Excludes 1872 Owens, 1923 Luohuo, and 1997 Manyi.
The pattern of fault-to-fault ruptures to favor normal and reverse ruptures over
strike-slip may be related to the orientations of principal stresses. For normal faults
the greatest principal stress is nominally vertical and the least stress is horizontal.
Dilational strain accumulates at the toe of the fault, perhaps with a defined strike
direction, but at depth at which it can influence other faults. Reverse and thrust
ruptures follow a similar mechanical process except with compressional strains at
depth, and the least principal stress approximately vertical. Neither principal stress
acts to guide the surface trace of the rupture. Thus normal or reverse faults of
opposite vergence can rupture in a single event and be mechanically consistent.
Examples of both may be found in the W08 event set. Strike-slip ruptures, on the
other hand, have both greatest and least principal stresses in the horizontal plane.
Active faulting concentrates on vertical planes 30-45 degrees from the direction of
the greatest principal stress, and only faults in this orientation can release
accumulated strike-slip stresses. The Landers rupture involved several mapped
faults almost certainly because the stresses to be relieved were acting obliquely to
their traces instead of being favorably released by any of the individual faults. The
1905 Bulnay and 1957 Gobi-Altai ruptures have large secondary ruptures, but they
also can be explained by a relatively constant horizontal stress regime.
Table 6 summarizes the branching of Table 4 by main rupture and branch type.
Note that ruptures can have more than one branch or fault-to-fault jump.
Table 6. Fault-to-fault style cases.
9
W08
Main
N
R
SS
Rupture to:
N
R
6
0
0
3
0
0
SS
1
1
3
BDW12
Main
N
R
SS
Rupture to:
N
R
0
0
0
2
0
2
SS
0
0
4
Joint
Main
N
N
6
R
0
SS
0
R
0
5
2
SS
1
1
7
Table 6 makes the point that fault-to-fault jumps and branches tend by a
significant margin to stay with the faulting style of the main trace. That is, a strikeslip rupture is much more likely, if it jumps or branches, to continue on another
strike-slip structure.
Table 7 summarizes the ratios of fault-to-fault jumps as a function of main fault
and alternate fault mechanisms. On average the normal mechanism main faults are
associated in this data set with one jump to another normal mechanism trace.
Reverse mechanism ruptures likewise often are associated with a jump to another
reverse fault. Ruptures are much less likely to change types, with the most likely,
strike-slip to reverse, being observed in about 7% of cases.
Table 7: Fault-to-fault jumping incidence by main and alternate fault mechanisms. Ratios are
computed with Table 6 “Joint” counts in the numerator and the total number of events (SS_R,
SS+N) from Table 5 in the denominator, and combined in the upper diagonal. On average
normal mechanism events are associated with one fault-to-fault jump.
Main Rupture
Normal
Reverse
Strike Slip
Combined Event Set Fault-to-Fault Rupture Ratio
N
R
SS
1.0
0
0.03
.63
0.07
0.21
Fault-to-Fault Probabilities from Numerical Modeling
Shaw and Dieterich (2007) studied probabilities of fault-to-fault interactions
using a 2-D numerical model. Dynamic fault interactions developed around flaws
that were randomly introduced (Figure 6). With shearing of this plate, faults
develop. As the faults begin to interact and connect, the probability of linking (a
fault-to-fault jump) can be developed as a function of fault separation r (Figure 7).
For seismic hazard estimation purposes Shaw and Dieterich (2007) propose a
probability of jumping, p(r) = e-r/r0 , with scale length r0 ~3 km, based on a fit to the
steeply descending portion of the log-probabilities. The choice of r0 for UCERF-3 can
be set empirically. For strike-slip ruptures empirical data indicate that in perhaps 1
in 30 cases a step of 5 km might be crossed. This gives to a value of r0 = 1.47.
10
Left: Figure 6. Shaw and Dieterich (2007) model to
estimate probabilities of fault-to-fault rupture in a
spontaneously evolving strike-slip faulting system.
Figure 7: Natural log of jumping probability. Unit
segment distance corresponds to a seismogenic crustal
thickness.
Fault-to-Fault Probabilities from Coulomb
Interactions
The Coulomb stress interaction provides a physics-based method for
evaluating the stress interactions between dislocations in the earth (King et al.,
1994, Parsons et al., 1999; Lin and Stein, 2004; Toda et al., 2011). When applied to
consecutive sections in a rupture, the method provides a way that strengths of
section-to-section interactions, and thus rupture viability, may be estimated.
Coulomb stress changes and their ratios are not probabilities per se, but
probabilities may be proposed if the ratios of stress interactions are interpreted as
averages over multiple ruptures.
For use in the Grand Inversion each potentially linked pair of sections shear
stress change DS and change in coulomb stress, DCCF, are computed. DCCF includes
changes in normal stress, and thus can be important for dipping faults. The
computation assumes a unit displacement on the first section and projects stress
change on the second. The calculation is not, in general, symmetric. That is, it does
not yield the same stress changes when the second section is treated as the source.
The probability PCCFi,j of branching from the ith section to the jth is ratio of CCFj
to the sum of CCF over all the ith sections partners. Table 8 shows the top few
lines of the Coulomb interaction table. S1 and S1 are section numbers, is the
shear stress change, CCF is the Coulomb interaction (bars), P is the ratio of
to the sum of for the section, and PCCF is the ratio of CCF to its respective
sum. Distance is the minimum separation distance between sections.
S1
S2
CFF
P
PCFF
Distance
11
(km)
0
0
0
0
0
1
1
1
1
2
2
3
3
4
4
5
1
1122
1123
1124
1125
0
2
1124
1125
1
3
2
4
3
5
4
23.051
0.248
3.620
1.428
1.237
23.074
85.408
0.734
0.667
80.837
180.169
168.040
6.999
6.735
61.667
77.608
23.067
0.471
5.065
0.939
1.043
23.09
84.657
0.705
0.3
80.119
180.401
168.256
7.22
6.885
61.146
76.988
0.779
0.008
0.122
0.048
0.042
0.210
0.777
0.007
0.006
0.310
0.690
0.960
0.040
0.098
0.902
1.000
0.754
0.015
0.166
0.031
0.034
0.212
0.778
0.006
0.003
0.308
0.692
0.959
0.041
0.101
0.899
1.000
0.00
4.53
0.37
0.72
3.18
0.00
0.00
3.40
3.40
0.00
0.00
0.00
0.00
0.00
0.00
0.00
Please see the “Additional Information” section at the end of this document for more
details about Coulomb modeling.
Empirical Interaction Using Section Slip Vectors
Each section in the fault model has a slip vector defined for it. This vector
indicates the long-term sense in which stress is released on that section. The degree
of consistency from section to section in a rupture is thus a measure of whether the
sections are likely to rupture in the same earthquake. If ruptures are constructed on
the basis of section proximity alone, sections can be linked into ruptures that are
inconsistent. For example, the Coast Range thrust faults are near in some places to
parallel-trending strike-slip faults. However, the slip vectors for the two are
substantially inconsistent, as they trend NE and NW, respectively. The two faults
can co-exist without linking if, as is generally thought, the thrust fault relieves faultnormal stress accumulations that build on the strike-slip system. In terms of
principal stress directions, the largest principal stress (1) for a N45W trending
right-lateral strike-slip fault would be between N and N15W (30-45 degrees CW
from the fault). For the N45W striking thrust, 1 is directed NE, 45 to 60 degrees
CW from the strike-slip case. Lozos et al. (2011) find that the orientation of the
regional stress field controls rupture favorability more than dynamic or static fault
interaction effects.
Consistency of motion in the context of a regional (to the interacting sections)
stress field is then a screening criteria for removal of ruptures before they are
considered in the inversion. Slip vectors more than 65 degrees apart on adjacent
sections are sufficiently inconsistent that they can be removed without loss. Based
on a northern California rupture sample, this criteria could reduce the input rupture
volume into the inversion by of order 10%.
12
Slip vector consistency may also be used as a weighting for ruptures. In
outline, section pairs that are parallel and have the same rake have no penalty; pairs
with angular discordance are penalized by the likelihood that rupture would pass a
change in orientation of that angle. A weighting function is shown in Figure 8.
Probabilities are approximate, as they average over restraining and releasing bends
(e.g., Lozos et al., 2011; Kase and Day, 2006) in order to be rupture-direction
independent. Separation distance is neglected, or may be applied separately. For
the complete rupture to occur all the section pairs must rupture, so the probability
of the rupture reflects the accumulated penalties of each pair.
Figure 8. Probabilities of pair-wise rupture
propagation given the angle between slip vectors.
The slip vector pair probabilities are roughly based on the probabilities with which
rupture continue at changes in trend of different magnitudes. The strong decline in
probability at up to 30 degrees reflects the range beyond which the principal stress
direction on the first section would be consistent with motion on the second. The
slip vector approach to probabilities is a means of weighting whole ruptures on the
basis of their sinuosity and weighting when the rupture direction is not known.
Application to UCERF-3 Rupture Probabilities
Based on the above discussion there are several approaches to weighting
ruptures in the UCERF-3 Grand Inversion.
1. Direct application of the Geometric distribution.
In this approach, each rupture is weighted independently on the basis of the
distance between sections. For each pair of sections where the minimum distance
dmin between a section is more than one km from the next section nearby, the
probability is decreased by a factor of 0.5. Numerically, rupture probabilities will be
(0.5)-n , for n=0, 1, 2, …. This applies the Geometric distribution model of Wesnousky
and Biasi (2011) without concern for the actual separation between sections so long
as it is greater than 1 km. The rupture probability Pr is:
Pr = ps,s+1(dmin), where ps,s+1 = { 1 if dmin <1 km; 0.5 if dmin>= 1 },
and the product is over all consecutive sections s,s+1.
2. Modified Geometric distribution
13
Proceed as in (1), but also down-weight steps of 5 km and greater with an
additional penalty. This respects the observation in Figure 6 and from numerical
modeling that steps greater than 5 km are rare. An ad hoc weighting would be
required for steps greater than 5 km. This constraint is not recommended unless
the style of rupture is considered, as it could unduly penalize normal and reverse
mechanism ruptures.
3. Exponential distance penalty
For each adjacent section pair in each rupture, calculate a linking function p(r)
-r/r0
= e , with distance r = dmin, and r0 as a variable. The probability for each rupture is
the product over all adjacent pairs. Note that for r=0, there is no down-weighting.
The nearest separation distance between sections is used for r. For a value r0=1.47,
the probability increment for a 5 km step would be 0.033, corresponding to 1 in 30
strike-slip steps.
Pr = exp(-dmin/r0) where the product is over all consecutive section pairs
4. Slip vector consistency weighting
For each adjacent section pair in each rupture, calculate the cosine of the angle
between slip vectors. Use the angle cos-1(abs()) in Figure 8 to obtain the pairwise probability ps,s+1. The absolute value corrects for cases where the strike is the
same but the dip direction changes. The rupture probability is then:
Pr = ps,s+1 , where the product is over all consecutive section pairs.
The result is probabilities for full ruptures that reflect internal trend changes
and that do not depend on (or coarsely average through) rupture direction. Use of
slip vector direction to pre-screen ruptures is discussed in Appendix R5.
5. Coulomb weighting
Ruptures probabilities may be estimated from the least probable Coulomb link
the rupture includes, or from the average probability over all pairs in the rupture.
The proposed application establishes lower thresholds on average stress-based
weighting of all physical gaps that a rupture must cross, and another threshold for
the weakest link; this prevents a very difficult step or branch form being averaged
out over a long rupture. It is proposed that continuous, named faults be allowed to
rupture end-to-end regardless of Coulomb weights because they are identified as
being able to do so by geologic mapping. Therefore Coulomb weighting is used only
as a physically-based way to assess a rupture’s ability to jump a gap, and a way to
prioritize whether a rupture moves onto a branching fault.
6. Categorical weighting based on fault types and jumping frequency
Apply Table 5 to compare frequency of fault-to-fault involvement by rupture
type, and Table 7 to compare frequencies of change of type in ruptures either as an
input global weighting or as a test after inversion.
14
References
Aochi, H., R. Madariaga, and E. Fukuyama (2002). Effect of normal stress during
rupture propagation along non-planar faults, Journal of Geophysical Research,
107(B2), 2038, doi:10.1029/2001JB000500.
Field, E. H., T. E. Dawson, K. R. Felzer, A. D. Frankel, V. Gupta, T. H. Jordan, T. Parsons,
M. D. Peterson, R. S Stein, R. J. Weldon, and C. J. Wills (2009). Uniform
California Earthquake Rupture Forecast, Version 2 (UCERF-2), Bulletin of the
Seismological Society of America, 99, 2053-2107.
Harris, R. A. and S. M. Day (1999). Dynamic 3-D simulations of earthquakes on en
echelon faults, Geophysical Research Letters, 26, 2089-2092.
Harris, R. A., J. F. Dolan, R. Hartleb, and S. M. Day (2002). The 1999 Izmit, Turkey,
earthquake: A 3D dynamic stress transfer model of intra-earthquake
triggering, Bulletin of the Seismological Society of America, 92, 245-255.
Kame, N., J. R. Rice, and R. Dmowska (2003). Effect of prestress state and rupture
velocity on dynamic fault branching, Journal of Geophysical Research, 108,
2265, doi:10.1029/2002JB002189.
Kase, Y. and S. M. Day (2006). Spontaneous rupture processes on a bending fault,
Geophysical Research Letters, 33, L10302, doi:10.1029/2006GL025870.
King, G.C.P., R. S. Stein, and J. Lin (1994). Static stress changes and the triggering of
earthquakes, Bulletin of the Seismological Society of America, 84, 935-953.
Lin, J., and R. S. Stein (2004). Stress triggering in thrust and subduction
earthquakes, and stress interaction between the southern San Andreas and
nearby thrust and strike-slip faults. Journal of Geophysical Research, 109,
B02303, doi:10.1029/2003JB002607.
Oglesby, D. (2008). Rupture termination and jump on parallel offset faults, Bulletin
of the Seismological Society of America, 98, 440-447.
Parsons, T., R.S. Stein, R. W. Simpson and P.A. Reasenberg (1999). Stress sensitivity
of fault seismicity; a comparison between limited-offset oblique and major
strike-slip faults. Journal of Geophysical Research, 104, 20183-20202.
Shaw, B. E. and J. H. Dieterich (2007). Probabilities for jumping fault segment
stepovers, Geophysical Research Letters, 34, L01307,
doi:10.1029/2006GL027980.
Toda, S., R. S. Stein, V. Sevilgen, and J. Lin (2011). Coulomb 3.3 Graphic-rich
deformation and stress-change software for earthquake, tectonic, and volcano
research and teaching, U. S. Geological Survey Open-File Report 2011-1060, 66
pp.
Wesnousky, S. G. (2006). Predicting the endpoints of earthquake ruptures: Nature,
444, 358-360.
Wesnousky, S. G. (2008). Displacement and geometrical characteristics of
earthquake surface ruptures: Issues and implications for seismic-hzard
analysis and the process of earthquake rupture, Bulletin of the Seismological
Society of America, 98, 1609-1632.
Wesnousky, S. G. and G. P. Biasi (2011). The length to which an earthquake will go
to rupture, Bulletin of the Seismological Society of America, 101, 1948-1950.
15
16
Additional Information Regarding Stress Modeling of Fault
Connections
Method
An effective earthquake rupture forecast must specify the complete magnitude
distribution that will affect a region as accurately as possible. This is generally
accomplished with geological observations on fault geometry to identify likely
rupture dimensions. Here we explore the idea that static stress transfer can capture
and quantify the majority of these observations, while enabling consideration of
massive numbers of possibilities. Coulomb stress change values are sensitive to
distance, being much stronger with proximity. Thus the calculations may encompass
rule-of-thumb ideas about fault steps and gaps derived from empirical studies.
Further, Coulomb stress change magnitudes are larger when stress is transferred to
compatible rakes. For example, stress changes are negative between along-strike
right-lateral and left-lateral fault subsections, but would be positive between a
strike-slip and orthogonal thrust fault link that are appropriately located to
accommodate tectonic strain (Figure A1). Thus static stress calculations can capture
mechanically sensible fault junctions, and penalize those that, while lying within the
commonly-invoked 3-5 km distance criterion, are not mechanically viable. Other
examples that would be penalized are closely spaced, parallel subsections with the
same rakes, because slip on one puts the other into a stress shadow.
Development of the Uniform California Earthquake Rupture Forecast (UCERF)
includes cataloging all known active faults in California as seismic sources (e.g., Field
et al., 2009). These faults are broken into subsections that extend through the
complete seismogenic thickness (typically 12-15 km) and are ~half the seismogenic
thickness in length (Figure A2). Each subsection has known or estimated dip and
rake values assigned.
17
Figure A1. Example calculations. (a) Rectangles show fault
subsections within four potential ruptures, which we would like to
assess relative viability. The ruptures in these examples can branch
between vertical strike-slip faults and dipping thrusts. In (b)
dislocation number 6, which lies at a fault junction, slips 1 m. It causes
a larger static stress change on subsection 7a than 7b, which would
cause Rupture 2 to be more favored than Rupture 1 when all the
linking stresses are averaged. In (c) dislocation number 7b is slipped,
which increases stress at 8b more than at 7a, implying that Rupture 4
is more favored than Rupture 3, but only slightly. Slip at 7b puts
dislocations 5 and 6 into a stress shadow, which implies that a
potential rupture going the reverse direction on the strike-slip fault is
not mechanically viable.
We begin with a list of adjacent subsections (< 5 km apart) from within the California fault model. The list of
possible junctions includes those that occur on a single defined fault as well as ones that branch onto other faults. Each
fault branch or junction can representa series of possible ruptures, ifevery choice is explored out to maximum extent.
18
Figure A2. California mapped faults simplified into subsections.
Fault geometry and rake data are used to create an elastic dislocation model for
each subsection with the methods of Okada (1992) and Simpson and Reasenberg
(1994). Our goal is to rank every junction in a relative way, so each source
dislocation is assigned uniform slip of 0.1 m. A second complete set of dislocation
models is made from the fault database that are target dislocations upon which
static stress changes can be resolved. Each subsection is broken down into 1 km by
1 km dislocations to preserve proper scaling. Static stress change is calculated by
solving for Coulomb failure stress ( ) as f ( n p) , where f is the
change in shear stress on the receiver fault (set positive in the rake direction), is the coefficient of friction, n is
the change in normal stress acting on the target fault (set positive for unclamping), and p is pore pressure change
(neglected here). We calculate shear stress (friction coefficient of ), and also Coulomb stress using a constant
friction coefficient of throughout
the model
just as we use a constant slip of 0.1 m, because we are interested in
direct comparison of different possible ruptures, and we want to treat them uniformly.
The geographic center is determined for each pair
of subsections, and the
dislocation models for that junction are projected into a local coordinate system
using a Mercator projection in km. Coulomb stress changes are systematically
calculated using each dislocation of the junction as a source, while all other
dislocations are targets.
19
This process creates a matrix of stress communications amongst the fault model.
We are primarily interested in links between adjacent subsections; for example, is a
rupture more or less likely to move along a given pathway when there are many
branching choices? Adjacency between subsections is a three-dimensional problem
because dipping and curving faults may be closer at depth than they are on the
surface. Therefore stress change calculations are made between all nearby (< 5km)
rupture sections, and each possible rupture branching is considered.
Once the list of stress links are gathered, we take two approaches to finding a
linking-stress value for use in ranking ruptures. In the first method, we normalize by
dividing the sum of the stress changes by the number of links. Each rupture then can
be characterized by a single value that describes its continuity and rake consistency.
Ruptures with long gaps and/or poorly aligned faults have a smaller mean linking
stress than a more continuous version. A second, alternative approach that we
pursue is calculation of the “weakest link” within a potential rupture. In this
approach each rupture is ranked by the most difficult bend, gap, or branching within
it as indentified by the smallest linking stress between adjacent subsections of the
rupture.
Applications, caveats, and sources of uncertainty
How should the linking stress be used? Can all ruptures be compared directly?
For example, a long rupture with 100 subsection links might include just one long
gap that produces one unfavorable stress change. Its signal is muted when averaged
with the other 99 links, making comparison of this rupture with another in a
completely different region or fault system problematic. However, comparison of
this value with that from ruptures on the same fault, but that stop short of the gap,
could provide useful ranking information. Additionally, ruptures such as this
example with one weak link can be directly compared on the basis of the minimum
stress change between adjacent sections, which is independent of rupture length.
As discussed above, Coulomb stress change calculations are very sensitive to the
distance between source and target dislocations. Therefore, uncertainty related to
mapped fault end points has important impact of the magnitude of calculated stress
change. This uncertainty can be magnified as the dislocations are projected
downdip, which of course is also affected by dip uncertainty. Expert geological
assessments can provide informed weighting in settings where a fault end point
might, for example, be mapped because of thin sedimentary cover, but the fault
actually is thought to persist closer or even connect directly with another. By
comparison, another end point might be very well characterized in hard rock,
leaving little doubt. The relative value of these observations would not be
accommodated in a stress change calculation unless some quantified uncertainty
was given. A further issue arises within some bending, dipping faults because
extension of rectangular dislocations downdip can cause overlapping at depth.
Dynamic rupture simulations indicate important effects of preexisting stress
distribution (Harris and Day, 1993; 1999) that can determine whether a rupture
jumps onto a branching fault, or clears a stepover. Additionally, the distribution of
slip within a rupture can affect whether a jump occurs or not (Ogelsby, 2008; Elliott
20
et al., 2009). These important effects are not addressable with a static stress
approach. A feature that is captured in moment-balanced models (Field et al., 2009;
Field and Page, 2011) is the relative frequency of ruptures jumping onto a lower slip
rate fault vs. staying on a major fault, because their frequencies are governed by
observed long-term slip rates.
Test Case Results
A subset region from the uniform California forecast (UCERF) region was used
for feasibility testing that includes just northern California faults (Figure A3). The
subset region has 20614 possible ruptures, each of which was assessed with linking
stress calculations. In this section we present some example results from the
calculations. The potential ruptures range in inferred magnitude from M=5.2 to
M=8.2, with the majority being large ruptures (Figure A4). Rupture magnitudes are
calculated using empirically derived area relations (Hanks and Bakun, 2007;
Ellsworth “B” relation, WGCEP, 2003, Eqn. 4.5), and are adjusted for aseismic slip on
creeping faults (Field et al., 2009).
A key issue in earthquake forecasting is establishing the magnitude distribution
affecting the region of interest, and the relative ability of ruptures to jump from fault
to fault has an important influence on possible rupture areas. Certainly the
magnitude distribution of possible ruptures (Figure A4) is unlike the observed for
large regions, which follow the Gutenberg-Richter power law distribution. Balancing
the earthquake rupture model against observed slip rates or plate motion rates
reduces the allowable number of the largest (hence most slip) events in the model.
21
Figure A3. Test region in northern California/San Francisco Bay
region. The faults and their subsections that were used in the method
testing are shaded blue.
Figure A4. Magnitude distribution of possible ruptures from the test
region in northern California/San Francisco Bay region shown in
Figure A3. The distribution. is weighted most heavily toward higher
magnitudes.
22
Figure A5. Example rupture ranking using linking stress in the San
Francisco Bay region. No directivity is implied, the ruptures have the
same linking stress whether they go from north to south or vice versa.
In (a), a M=6.44 model rupture (shown by red shading) jumps from
the Calaveras fault across a gap onto the south Hayward fault; the
mean calculated linking stress for this rupture is 5.6 bars. In (b) an
equivalent magnitude (M=6.45) rupture that is continuous on the
Calaveras fault is shown, which has a mean linking stress of 9.1 bars,
almost double. In (c) the equivalent rupture is contained on the south
Hayward fault, which has a mean linking stress of 6.7 bars. Differences
between weakest links are more pronounced, with a range from 1.2
23
bars in the jumping rupture to 7.5 bars for the continuous Calaveras
earthquake.
We show example linking stress calculations for three possible ruptures in the
Hayward-Calaveras fault system in the eastern San Francisco Bay region in Figure
A5. The three ruptures have very similar magnitudes, but one involves a step from
the Calaveras to the Hayward fault, another lies entirely on the Calaveras, and a
third occurs only on the Hayward fault. Relatively small magnitude (M=6.4)
ruptures are used for this comparison to minimize complications from other
structural influences, like bends. As would be expected, we find that the continuous
rupture on the Calaveras fault has a higher mean linking stress than the jumping
rupture by almost double, and a comparison of their weakest links gives the
continuous rupture a >6-fold advantage over the branching rupture (Figure A5). An
equivalent magnitude Hayward-fault-only rupture is favored by a factor of ~1.2
over the jumping rupture based on mean linking stress, and by a > 5-fold factor
based on weakest links.
This example illustrates a method for quantifying the likelihood that a rupture
will branch onto an adjacent fault vs. remaining on a continuous fault. The stress
values could be used as a relative ranking, or could be used to give proportional
weight to different rupture scenarios. However, some normalization may be
necessary before direct weighting could be employed; the example given in Figure
A5 highlights a physical issue with stress-based models. The Calaveras fault has a
releasing bend, and thus rupture propagation is calculated to be more favored on it
than the slightly restraining orientation of the south Hayward fault. The effect has
the Calaveras ruptures favored by a factor of ~1.4 over equivalent Hayward fault
events. It is unclear whether a long-term earthquake rupture model would want to
give higher weighting to continuous Calaveras fault ruptures over continuous south
Hayward ruptures, or whether the method is best applied only at junctions and
other geometric features with potential to arrest earthquakes.
We give another example result taken from a circumstance where manual
rupture prioritization would be very difficult, a series of imbricate thrust faults in
the Mendocino region of northern California (Figure A6). The mean linking stresses
for individual ruptures and the weakest-link stresses are given as proposed ways to
rank their relative viability. In this example, a simple continuous rupture that
occurs on a single fault trace is compared with more complex, multi-fault ruptures.
Surprisingly, most of the multi-fault ruptures are higher ranked than the continuous
example (Figure A6), which illustrates that details in fault geometry might favor
unexpected ruptures (something that mirrors observations). Other possible
ruptures with significant overlap are ranked lower, as might be expected.
We lastly note a few observations from examining all the 20614 possible rupture
ranks as a function of magnitude. The very highest ranked ruptures tend to be
among the lowest magnitude considered (M~6.5; Figure A7), though low magnitude
ruptures are comparatively rare within the distribution of possible events (Figure
A4).
24
Figure A6. A series of possible ruptures within an imbricate thrust
fault system in the Mendocino region of northern California (location
shown in inset map). The ruptures (shown in red) can be ranked by
comparing the average linking stress calculated for each rupture, or
the minimum linking stresses. The ruptures with less overlap tend to
have higher minimum stresses, and thus might be considered more
viable.
The Appendix lists some of the highest ranked ruptures and their magnitudes (Table
A1). Within the top 5000 ranked ruptures, there is a systematic decline in ranking
with increasing magnitude. Rank dependence on magnitude is less clear amongst
the lower ranked ruptures (rank<5000; Figure A7).
25
Figure A7. The distribution of possible ruptures as a function of their
linking stress rank and magnitude. Top ranking is 1, and lowest is
20614. Despite the predominance of high magnitude ruptures studied
(Figure A4), we find that most of the very highest ranked ruptures are
M<7.0. In (a), ranking is by average linking stress for whole ruptures,
and in (b) ranking is performed by the minimum linking stress
(weakest link).
We examine linking stress results in the context of an earthquake-rate solution
made for all possible ruptures using the method of Field and Page (2011) within the
northern California test region shown in Figure A3. Of the 20614 possible ruptures
(Figure A4), 765 are given rates. The solution is fit to long term geologic fault slip
rates, and paleoseismic rate observations. This result is one of many possible
earthquake rate solutions that can be fit to observations. The goal of the linking
stress method introduced in this paper is to provide information that might prevent
ruptures with low viability being given high rates.
26
Figure A8. In (a), rupture ranking from linking stress calculations is
compared with the annual rupture rate calculated for them using the
method of Field and Page (2011). Many low-ranked ruptures are
given rates, implying that some discrimination factor may be
necessary. Dashed black line gives the best fit to a linear relation
between rate and rank, which has a slightly negative slope. In (b) and
(c) two example ruptures that are given high rates by the inversion,
but low ranking from linking stresses are shown. High rates (~80th
percentiles) are associated with ruptures that have either complex
junctions or long gaps, causing them to have very low-percentile (0th)
linking-stress ranks.
The example earthquake rate solution does include many low-ranked ruptures
as identified by calculated linking stresses (Figure A8a). This outcome is of course
27
an acknowledged possibility with an inversion approach that can include all
possible ruptures. Thus a quantitative rupture ranking based on expert geologic
conclusions, static linking stresses (this study), dynamic rupture simulations, or
some combination of all will be necessary to prevent outcomes like the examples
given in Figure A8, where high rates are assigned to unlikely ruptures that have
geometric complexity and/or long gaps.
Summary
Linking stress calculations may be useful as a means of ranking ruptures,
particularly within fault zones and at points of geometric complexity like fault steps
or bends. We see consistent results in terms of ranking continuous ruptures vs.
stepping junctions. However, we find also that a change in strike, or involvement
with nearby subsections does not necessarily imply a lower rank. Calculations are
sensitive to details in fault subsection location, especially how the ends are defined.
We identify two ways to rank ruptures using linking stress, (1) the mean of all
linking stresses within a potential rupture, and (2) the minimum linking stress
(weakest link) amongst all adjacent subsections. The weakest link approach is most
familiar in terms of how faults are usually segmented from geologic information,
and offers a way to avoid issues related to static stress change calculations such as
favoring releasing bends along continuous ruptures. This approach may also be the
most useful in terms of integrating linking stress calculations with other rupture
weighting procedures such as expert geologic interpretation.
Data and Resources
The Working Group on California Earthquake Probabilities maintains the
California Reference Geologic Fault Parameter Database at: http://wgcep.org/dataref_fault_db. The fault data are primary input sources for the Uniform California
Earthquake Rupture Forecast (UCERF), and are also part of the USGS Quaternary
Fault
and
Fold
Database,
which
can
be
found
at
http://earthquake.usgs.gov/hazards/qfaults/.
Additional References
Barka, A. A., and K. Kandinsky-Cade (1988). Strike-slip fault geometry in Turkey and its influence on
earthquake activity, Tectonics, 7, 663-684.
Earthquake Research Committee (2005). Comprehensive study of probabilisitic seismic hazard map
for Japan. Tokyo, Japan: Headquarters for Earthquake Research Promotion, 125 pp.
Eberhart-Phillips, D., Haeussler, P.J., Freymueller, J.T., Frankel, A.D., Rubin, C.M., Craw, P., Ratchkovski,
N.A., Anderson, G., Carver, G.A., Crone, A.J., Dawson, T.E., Fletcher, H., Hansen, R., Harp, E.L.,
Harris, R.A., Hill, D.P., Hreinsdóttir, S., Jibson, R.W., Jones, L.M., Kayen, R., Keefer, D.K., Larsen, C.F.,
Moran, S.C., Personius, S.F., Plafker, G., Sherrod, B., Sieh, K., Sitar, N., Wallace, W.K. (2003). The
2002 Denali fault earthquake, Alaska: A large magnitude, slip-partitioned event, Science, 300,
1113-1118. DOI: 10.1126/science.1082703
Elliott, A. J., J. F. Dolan, and D. D. Oglesby (2009). Evidence from coseismic slip gradients for dynamic
control on rupture propagation and arrest through stepovers, J. Geophys. Res., 114, B02312,
doi:10.1029/2008JB005969.
28
Field, E. H., T. E. Dawson, K. R. Felzer, A. D. Frankel, V. Gupta, T. H. Jordan, T. Parsons, M. D. Petersen,
R. S. Stein, R. J. Weldon II, and C. J. Wills (2009). The uniform California earthquake rupture
forecast, version 2 (UCERF 2), Bull. Seismol. Soc. Am., 99, 2053-2107, doi: 10.1785/0120080049.
Field, E. H., and M. T. Page (2011). Estimating Earthquake-Rupture Rates on a Fault or Fault System,
Bull. Seismol. Soc. Am., 101, 79–92, doi: 10.1785/0120100004
Frankel, A. D., M. D. Petersen, C. S. Mueller, K. M. Haller, R. L. Wheeler, E.V. Leyendecker, R. L. Wesson,
S. C. Harmsen, C. H. Cramer, D. M. Perkins, and K. S. Rukstales (2002). Documentation for the
2002 Update of the National Seismic Hazard Maps, U. S. Geol. Surv. Open File Rep., OFR-02-420,
33pp.
Hanks, T. C., and W. H. Bakun (2008). M-log A observations for recent large earthquakes, Bull.
Seismol. Soc. Am., 98, p. 490-494.
Harris, R. A., and S. M. Day (1993). Dynamics of fault interaction: Parallel strike-slip faults, J. Geophys.
Res., 98, 4461-4472.
Harris, R. A., and S. M. Day, (1999). Dynamic 3D simulations of earthquakes on en echelon faults,
Geophys. Res. Lett., 26, 2089-2092.
Kase, Y., and K. Kuge (1998). Numerical simulation of spontaneous rupture processes on two noncoplanar faults: the effect of geometry on fault interaction, Geophys. J. Int., 135, 911-922.
Lettis, W., J. Bachhuber, R. Witter, C. Brankman, C. E. Randolph, A. Barka, W. D. Page, and A. Kaya,
(2002). Influence of releasing step-overs on surface fault rupture and fault segmentation:
Examples from the 17 August 1999 Izmit earthquake on the North Anatolian fault, Turkey, Bull.
Seismol. Soc. Am., 92, 19-42.
Li, H.-B., Wang, Z.-X., Fu, X.-F., Hou, L.-W., Si, J.-L., Qiu, Z.-L., Li, N., Wu, F.-Y. (2008). The surface
rupture zone distribution of the Wenchuan earthquake (Ms8.0) happened on May 12th, 2008,
Geology in China, 35, 803-813.
Lozos, J. C., D. D. Oglesby, B. Duan, and S. G. Wesnousky (2011). The effects of double fault bends on
rupture propagation: A geometrical parameter study, Bull. Seismol. Soc. Am., 101, 385–398, doi:
10.1785/0120100029.
McCann, W. R., S. P. Nishenko, L. R. Sykes, and J. Krause (1979). Seismic gaps and plate tectonics:
seismic potential for major boundaries, Pure Appl. Geophys., 117, 1082-1147.
National Seismic Hazard Maps for Japan (2005), Headquarters for Earthquake Research Promotion,
162pp.
Okada, Y., Internal deformation due to shear and tensile faults in a half-space, Bull. Seismol. Soc. Am.,
82, 1018-1040, 1992.
Oglesby, D. (2008). Rupture termination and jump on parallel offset faults, Bull. Seismol. Soc. Am., 98,
440–447, doi: 10.1785/0120070163
Petersen, M. D., A. D. Frankel, S. C. Harmsen, C. S. Mueller, K. M. Haller, R. L. Wheeler, R. L. Wesson, Y.
Zeng, O. S. Boyd, D. M. Perkins, N. Luco, E. H. Field, C. J. Wills, and K. S. Rukstales (2008).
Documentation for the 2008 update of the United States National Seismic Hazard Maps, US Geol.
Surv. Open File Rep., 2008-1128, 61pp.
Romeo, R. W. (2005). Earthquake hazard in Italy, 2001–2030, Natural Hazards, 36, 383-405,
doi:10.1007/s11069-005-1939-1.
Simpson, R. W. and P. A. Reasenberg, Earthquake-induced static-stress changes on central California
faults, U. S. Geol. Surv. Prof. Pap. 1550-F, 55-89, 1994.
Wesnousky, S. G. (2008). Displacement and geometrical characteristics of earthquake surface
ruptures: Issues and implications for seismic-hazard analysis and the process of earthquake
rupture, Bull. Seismol. Soc. Am., 98, 1609–1632, doi: 10.1785/0120070111.
Working Group on California Earthquake Probabilities (1988). Probabilities of large earthquakes
occurring in California on the San Andreas fault, U.S. Geological Survey Open-File Report, 62 pp.
Working Group on California Earthquake Probabilities (1990). Probabilities of large earthquakes in
the San Francisco Bay Region, California, U.S. Geological Survey Circular, 51 pp.
Working Group on California Earthquake Probabilities (WGCEP) (1995). Seismic hazards in Southern
California: Probable earthquakes, 1994 to 2024, Bull. Seismol. Soc. Am., 85, 379-439.
Working Group on California Earthquake Probabilities (WGCEP) (2003). Earthquake probabilities in
the San Francisco Bay region: 2002 to 2031, USGS Open-File Report 03-214.
29