Unlicensed-7-PDF753-756_engineering optimization
advertisement

Problems
735
(a) x(l) = 0 , x(u) = 5
(b) x(l) = 0 , x(u) = 10
(c) x(l) = 0 , x(u) = 20
13.4
A design variable, with lower and upper bounds 2 and 13, respectively, is to be represented with an accuracy of 0.02. Determine the size of the binary string to be used.
13.5
Find the minimum of f = x 5 Š 5 x 3 Š 20 x + 5 in the range (0, 3) using the ant colony
optimization method. Show detailed calculations for 2 iterations with 4 ants.
13.6
In the ACO method, the amounts of pheromone along the various arcs from node i
are given by _ij = 1 2 4 3 5,,,,, 2 f
o r j = 1, 2, 3, 4, 5, 6,
13.7
13.8
13.9
respectively. Find the arc (ij )
chosen by an ant based on the roulette-wheel selection process based on the random
number r = 0.4921.
Solve Example 13.5 by neglecting pheromone evaporation. Show the calculations for 2
iterations.
Find the maximum of the function f = Šx 5 + 5 x 3 + 20x Š 5 in the range Š4 _ x _ 4
using the PSO method. Use 4 particles with the initial positions x 1 = Š2, x 2 = 0,
x3 = 1, and x 4 = 3. Show detailed calculations for 2 iterations.
Solve Example 13.4 using the inertia term when _ varies linearly from 0.9 to 0.4
13.10
in
Eq. (13.23).
Find the minimum of the following function using simulated annealing:
f (X) = 6x 12 Š 6x 1x 2 + 2x 22 Š x 1 Š 2x2
13.11
Assume suitable parameters and show detailed calculations for 2 iterations.
13.12
Consider the following function for maximization using simulated annealing: f (x) =
x(1.5 Š x) in the range (0, 5). If the initial point is x 0) =(
2 .0, generate a
neighboring
point using a uniformly distributed random number in the range (0, 1). If the temperature
is 400, find the pbobability
of accepting the neighboring
String
Fitnesspoint.
8
0 0 1 1 0 0
The population of binary strings in a maximization problem is given below:
12
0 1 0 1 0 1
1 0 1 0 1 1
6
2
1 1 0 0 0 1
0 0 0 1 0 0
18
9
1 0 0 0 0 0
0 1 0 1 0 0
10
Determine the expected number of copies of the best string in the above population in
the mating pool using the roulette-wheel selection process.
13.13
Consider the following constrained optimization problem:
Minimize
f = x 13 Š 6x 12 + 11x 1 + x3
736
Modern Methods of Optimization
subject to
x1 + x 2 Š x
2
2
3
2
_0
4 Š x 12 Š x 2 Š x2 _ 0
2
3
x3 Š 5 _ 0
Š x i _ 0; i = 1, 2, 3
Define the fitness function to be used in GA for this problem.
13.14
The bounds on the design variables in an optimization problem are given
by
Š10 _ x 1 _ 10,
0 _ x 2 _ 8,
150 _ x 3 _ 750
Find the minimum binary string length of a design vector X = {x 1, x 2, x 3} T to achieve
an accuracy of 0.01.
14
Practical Aspects of Optimization
14.1
INTRODUCTION
Although the mathematical techniques described in Chapters 3 to 13 can be used
to solve all engineering optimization problems, the use of engineering judgment and
approximations help in reducing the computational effort involved. In this chapter we
consider several types of approximation techniques that can speed up the analysis time
without introducing too much error [14.1].
These techniques are especially useful in finite element analysis-based optimization procedures. The practical computation of the derivatives of static displacements,
stresses, eigenvalues, eigenvectors, and transient response of mechanical and
structural systems is presented. The concept of decomposition, which permits the
solution of a large optimization problem through a set of smaller, coordinated subproblems is presented. The use of parallel processing and computation in the solution
of large-scale optimization problems is discussed. Many real-life engineering systems
involve simultaneous optimization of multiple-objective functions under a specified
set of constraints. Several multiobjective optimization techniques are summarized in
this chapter.
14.2
14.2.1
REDUCTION OF SIZE OF AN OPTIMIZATION PROBLEM
Reduced Basis Technique
In the optimum design of certain practical systems involving a large number of (n)
design variables, some feasible design vectors X 1, X 2, . . . , X r may be available to start
with. These design vectors may have been suggested by experienced designers or may
be available from the design of similar systems in the past. We can reduce the size of
the optimization problem by expressing the design vector X as a linear combination of
the available feasible design vectors as
X = c 1X 1 + c 2X 2 + · · · + c rXr
(14.1)
where c 1, c 2, . . . , c r are the unknown constants. Then the optimization problem can
be solved using c 1, c 2, . . . , cr as design variables. This problem will have a much
smaller number of unknowns since r _ n. In Eq. (14.1), the feasible design vectors X 1, X 2, . . . , Xr serve as the basis vectors. It can be seen that if c 1 = c 2 = · · · =
cr = 1/r, then X denotes the average of the basis vectors.
Engineering Optimization: Theory and Practice, Fourth Edition
Copyright © 2009 by John Wiley & Sons, Inc.
Singiresu S. Rao
737
738
14.2.2
Practical Aspects of Optimization
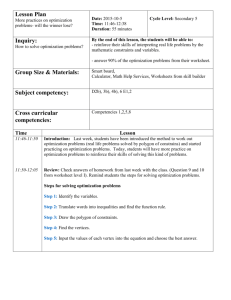
Design Variable Linking Technique
When the number of elements or members in a structure is large, it is possible to
reduce the number of design variables by using a technique known as design variable
linking [14.25]. To see this procedure, consider the 12-member truss structure shown
in Fig. 14.1. If the area of cross section of each member is varied independently, we
will have 12 design variables. On the other hand, if symmetry of members about the
vertical (Y ) axis is required, the areas of cross section of members 4, 5, 6, 8, and 10
can be assumed to be the same as those of members 1, 2, 3, 7, and 9, respectively.
This reduces the number of independent design variables from 12 to 7. In addition, if
the cross-sectional area of member 12 is required to be three times that of member 11,
we will have six independent design variables only:
_
•x _1
•x 2•_
• x •3
•x4_ • •
•x5_ _•
• x6 ••
_
•
• A1 _
• A 2__•
• A ••
•• 3 _
• A7 _
•• A9 _
• A11 •
_
•
•
_
•
dependent variables
X=
(14.2)
can be determined as A 4 =
_
A1 , A 5 = A 2, A 6 = A 3, A 8 = A 7, A10 = A 9, and A12 = 3A 11. This procedure of treating certain variables as dependent variables is known as design variable linking. By
defining the vector of all variables as
Once the vector X is known, the
ZT = {
z2
. .. z
A2
1z
12}
T
_ {A
...A
T
12}
1
Y
4
3
Y4
6
12
3
7
2
Y7
5
9
10
2
6
11
1
Y6
4
7
8
1
5
0
Figure 14.1
Concept of design variable linking.
X