Draft - AIP FTP Server
advertisement

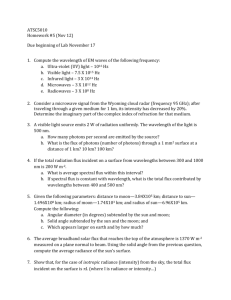
Supplementary Information for Interfacial Wicking Dynamics and Its Impact on Critical Heat Flux of Boiling Heat Transfer Beom Seok Kim1, Hwanseong Lee1, Sangwoo Shin2, Geehong Choi1, Hyung Hee Cho1,* 1 Department of Mechanical Engineering, Yonsei University, 50 Yonsei-ro, Seodaemun-gu, Seoul 120-749, KOREA 2 Department of Mechanical and Aerospace Engineering, Princeton University, Princeton, NJ 08544, USA * Corresponding author Tel.: +82 2 2123 2828 Fax: +82 2 312 2159 E-mail: hhcho@yonsei.ac.kr Synthesis of Nanopillar Structures. For the manipulation of wicking characteristics, we fabricated hexagonallyarranged nanopillar structures and manipulated their characteristic lengths within sub-micron range through nanosphere lithography combined with metal-assisted chemical etching,1 which allowed us to precisely control the characteristic lengths of the structures without expensive equipment and processing.2-4 In this study, we used p-type (Boron-doped) silicon (Si) wafers with 500-μm thickness, (100) orientation, and resistivity between 1 and 10 Ω cm. We used the Langmuir-Blodgett Figure S1. Schematic of nanosphere lithography with the metal-assisted chemical etching method: (a) silicon substrate after cleaning process; (b) formation of monolayer of polystyrene (PS) nanospheres by Langmuir-Blodgett method. The diameter of PS determines the pitch between the structures; (c) dry etching of the nanospheres on the Si substrate with O2 plasma to turn from closed-packed PS monolayer to non-closed-packed one. Here, we can control the diameter of nanopillars by adjusting etching time of PS; (d) deposition of a thin metallic gold layer by an E-beam evaporator; (e) metal-assisted chemical etching (MaCE) of Si. The Si substrate underneath the gold layer is then etched away in a mixture of 5M HF and 0.5M H2O2 etchant; (f) after MaCE process, the gold layer and remaining polystyrene spheres are removed. method with 610 nm-diameter polystyrene nanospheres (Invitrogen, USA) to form a hexagonally closed-packed monolayer on the air-water interface. The monolayer of polystyrene nanospheres was then scooped up on the Si substrate.5 After drying to remove the remaining water, the nanospheres on the Si substrate were turned from closedpacked to non-closed-packed by dry etching with O2 plasma while maintaining their location and just shaving their external surfaces. A thin metallic gold layer was then deposited with an E-beam evaporator. The open areas created by the previous dry etching of polystyrene nanospheres were thus covered with gold. The Si substrate underneath the gold layer, which acts as a catalytic layer in metal-assisted chemical etching of Si, was then etched away in a mixture of 5M HF and 0.5M H2O2 etchant. This process allowed the gold layer to sink vertically into the Si substrate, to protrude as hexagonally arranged nanopillar structures. The pitch of the pillars was identical to the initial diameter of polystyrene nanospheres and their diameter was the same as that of the remaining polystyrene nanospheres. After the etching process, the gold layer and remaining polystyrene spheres were removed. Morphology Characterization. Morphological characteristics including characteristic lengths of nanopillars were evaluated by SEM measurement and image processing. The measurements and data reduction were conducted by FESEM (JSM-7001F, JEOL). Evaluation of Wicking Performance and Static Contact Angle. All evaluations were performed using de-ionized water for wickability and contact angle (CA). Nanopillar samples were located on a horizontal surface, and then we slightly introduced a DI water droplet of 5 μL on the substrate. Wicking phenomena were recorded by a high speed camera (M310, Dantec) at 100 fps, and then wicking distance, which is the displacement between the wicking-front line and the droplet edge of droplet contact line, was evaluated by a post image processing. The numeric wicking distance was evaluated by averaging 8 wicking distances measured along octangular radial lines. The static contact angles were determined using a contact angle measuring system (KSV CAM-200, KSV Ins.). Using images taken with a high speed camera with a frame interval of 2 ms and a resolution of 512 × 480 pixels, contact angles were automatically analyzed by an imaging process based on a specialized calibrating program. Using a DI water droplet of Figure S2. Visualization of hemi-wicking on the manipulated substrates of (a) case1, (b) case2, and (c) case3. Three movies are additionally attached (multimedia view). 2.5 μL, more than nine sets of measurements were conducted at different substrates and then averaged.6 Fabrication of heat transfer measuring sensor with the in-situ nanopillars.7 For boiling characterizing, we devised a temperature array sensor with the nanopillars in situ on a silicon substrate. A p-type silicon wafer (Boron-doped, (100) orientation, with a resistivity between 1 and 10 Ω cm) with the thickness of 500 μm was used as a substrate. For the fabrication, the wafer was cleaned for 40 min in a 1:3 mixture of H2O2 and H2SO4 by volume. The wafer was then further cleaned with acetone and methanol for 5 min each in turn. After the cleaning process, a photoresist was coated using a spin coater to spread it uniformly on the substrate and a hot plate to solidify it. UV lithography was used to dissolve the photoresist selectively where resistance temperature detectors (RTDs) would be formed. Platinum was deposited on the substrate, and the photoresist layer under the platinum was removed via platinum lift-off process. An insulating oxide-nitride-oxide multilayer was deposited on the RTDs. The next step was to remove the insulating material deposited on the area of the RTD electrodes via an additional photolithography and a reactive ion etching. An indium tin oxide (ITO) layer with a thickness of 800 nm was deposited Figure S3. The sensor chip with synthesized nanopillars in situ on a silicon substrate: (a) schematics of temperature measuring RTD sensors with nanopillars partially synthesized on the rear side of the heater; (b) RTD sensor; (c) fabricated nanopillars of case 2.7 Reprinted from Int. J. Heat Mass Transf., Vol. 70, B. S. Kim et al., Stable and uniform heat dissipation by nucleate-catalytic nanowires for boiling heat transfer, 23-32, Copyright (2014), with permission from Elsevier. and patterned by wet etching using a photoresist masking process to form the heater. Finally, gold electrodes were formed on both sides of the heater using an additional metal lift-off process. The sensor chip for measuring local temperatures and supplying heat fluxes consists of five sets of 4-wire resistance temperature detector (RTD) and a thinfilm heater. Heating area (0.5×1.0 cm2) by the thin film heater is designed at the center of the chip and the RTDs are evenly arranged in a row with the spacing of 1.5 mm. After the fabrication of the sensor, the in situ nanopillar structures were synthesized on the back of the sensor chip. For the synthesis of nanopillars on the completed sensor, we made use of a Teflon holder with O-rings which can prevent direct contact between the sensor and the etching solution of MaCE process except the rear side of the sensor. Figure S3 shows schematics of the devised sensor. To verify the temperature, resistance values from local RTDs were translated into temperatures through fourwire circuits according to the linear correlation between temperature and resistance. We determined the linear variation of electric resistance of RTDs with temperature, before carrying out boiling experiments. All of experimental results of wall temperatures presented in this study were evaluated from the local sensor with an area of 162 μm × 162 μm (Fig. S3) which located at the center of the heating area. Pool boiling facility and experiments.7,8 Figure S4 shows a schematic diagram of pool boiling experimental facilities. The chamber was made of stainless steel. For the installation of the sensor, the main body of test section was made of Teflon with low thermal conductivity ( kTeflon =0.23 W m-1 K-1) to minimize heat conduction loss. Spring probes and electric busbars (Cu) were arranged for acquiring temperature-dependent resistance signals from the RTDs and applying electric currents through the ITO heater, respectively. The portion of the test section just below the installed sensor and a cover plate were made of macerite ceramic SP ( k macerite =1.6 W/mK) with a high melting point higher than 1000°C to prevent conductive heat loss and breakdown when test conditions approach the CHF limitation. The gap between the sensor and the test section was sealed using room-temperature vulcanization silicone (RTV Ultra Blue – 77BR, Permatex). A DC power supply (200 V-10 A) was used to supply heat flux by adjusting the current. Electric Figure S4. Schematic diagram of pool boiling test setup.7 Reprinted from Int. J. Heat Mass Transf., Vol. 70, B. S. Kim et al., Stable and uniform heat dissipation by nucleate-catalytic nanowires for boiling heat transfer, 23-32, Copyright (2014), with permission from Elsevier. signals of voltage drop originating from the film heater, additional shunt device checking the applied currents, and thermocouples were monitored by a data acquisition module (34970A, Agilent technology). The four-wire RTD signals were collected by an additional module (SCXI 1503 and DAQ 6259 board, National Instruments). We used DI water as a working fluid under the saturated condition ( Tsat =100ºC) at an atmospheric pressure condition. Experiments were conducted after removing gases dissolved in the reserved DI water. After making steady-state conditions at a controlled heat flux value, all of the data including wall temperatures from the RTDs were obtained for more than 30 s and then averaged for data reduction. Using the devised heat transfer sensor, we gradually increased an applied heat flux by adjusting DC electric currents which pass through the thin film heater the sensor substrate. When we made steady-state conditions at a controlled heat flux value, the local wall temperature was taken for 30 s with monitoring frequency of 1000 Hz and averaged.7 Estimation of applied heat flux and local wall temperature. The applied heat flux was evaluated through estimation of applied current passing through the film heater and consequent voltage drop from the heater. The estimation can be explained as follows: 𝑞 ′′ = 𝑄𝑎𝑐𝑡𝑢𝑎𝑙 𝑄𝑖𝑛 − 𝑄𝑙𝑜𝑠𝑠 𝑉ℎ𝑒𝑎𝑡𝑒𝑟 ∙ 𝐼 − 𝑄𝑙𝑜𝑠𝑠 = = , 𝐴ℎ𝑒𝑎𝑡𝑒𝑟 𝐴ℎ𝑒𝑎𝑡𝑒𝑟 𝐴ℎ𝑒𝑎𝑡𝑒𝑟 (S1) where 𝑞 ′′, Q, A, V, and I are the heat flux, applied power, surface area, voltage drop through the thin film heater and applied current, respectively. For the accurate estimation of the heat flux we numerically estimated a lateral conductive heat loss through the conductive substrate of Si, and then compensated the deviation for the definitive heat flux value. The loss is evaluated by three-dimensional numerical analyses using a commercial code (Fluent 6.3.26, ANSYS), comparing with the experimental results on wall temperature data. After the numerical correction of the heat flux, the temperature from an RTD which locates at the center of the heating area was correlated to indicate the exact temperature of the back of the boiling surface because the RTDs were on the opposite side of the Si substrate as the nanopillars. We derived the boiling surface temperature of the center of a boiling surface based on one-dimensional Fourier’s conduction law through the Si substrate as follows:9,10 𝑇𝑤 = 𝑇𝑅𝑇𝐷 − 𝑡𝑆𝑖 ′′ ∙𝑞 , 𝑘𝑆𝑖 (S2) where Tw, TRTD, tSi and kSi refer to the wall temperature on the boiling surface, temperature from RTDs, thickness of Si substrate and thermal conductivity of Si substrate, respectively. We neglect the conductive heat dissipation through Si nanopillars due to their intrinsic low thermal conductivity. For the calculation of the wall temperature from the substrate with nanopillars, we consider the thinning of the substrate by the height of nanopillars. Consequent Tw indicates the temperature at an external surface of the substrate at the same altitude of the root of nanopillars. Determination of critical heat flux (CHF). As the heat flux increases the excessive bubble coalescence occur preventing re-wetting of the surface, and it finally results in abrupt increase of wall superheat causing surface burn-out. It is because vaporized bubbles accompany the coalescence of separate vapor bubbles and then form a thin vapor layer which prevents thermal heat flux from dissipating towards the outward environment. 11 Therefore, the significant temperature fluctuation can be clearly monitored just before a critical condition. 12 When heat flux approaches CHF, local wall temperatures fluctuate vigorously. In this study, we stopped the supply of heat flux so long as the temperature fluctuation larger than 15 K could be monitored. The critical heat flux value was quantitatively evaluated by adding the heat flux measured at a steady state condition just before the occurrence of the significant temperature variation (more than 15 K) and half an increment from the previous step, just before increasing the heat flux.7,13 Uncertainty analysis. The uncertainty analysis is performed for the main variables described in the manuscript as well as the variables about fundamental dimensional estimations. All of errors are estimated with a confidence level of 95% with amounts of measured data set for each variable. Errors in the dimensional estimation of the fabricated sensor and temperature measurement by conventional K-type thermocouples that we used are 0.2% and 1.32 K, respectively. A principal error source in boiling experiment results from heat loss pertaining to systematic installation of the test sections and intrinsic conductive heat loss. Because it is not easy to directly estimate heat loss,14 we indirectly estimate the heat loss by a computational analysis using boundary conditions obtained from experiments, and then reflected it in the uncertainty of applied heat flux. The heat loss is calculated using 3-dimensional numerical analysis using commercial CFD code (Fluent v.6.3.26, ANSYS). We compare the numeric results with experimental ones especially on local temperature from the center point of heating area. Iterative calculation is conducted until the deviation between the analytical and experimental results comes to within 1.0%. The uncertainties on principal variables are evaluated based on the relationships used to derive for heat flux and local wall temperature as follows:15 2 1⁄2 ′′ 𝛿𝑞 ′′ 𝛿𝑉 2 𝛿𝐼 2 𝛿𝐴 2 𝛿𝑞𝑙𝑜𝑠𝑠 ( ′′ ) = [( ) + ( ) + ( ) + ( ′′ ) ] 𝑞 𝑉 𝐼 𝐴 𝑞𝑎𝑐𝑡𝑢𝑎𝑙 , (S3) 2 1⁄2 𝛿𝑇𝑤 𝛿𝑇𝑅 2 𝛿𝑡𝑆𝑖 2 𝛿𝑘𝑆𝑖 2 𝛿𝑞 ′′ ( ) = [( ) +( ) +( ) + ( ′′ ) ] 𝑇𝑤 𝑇𝑅 𝑡𝑆𝑖 𝑘𝑆𝑖 𝑞 . (S4) From the procedures, we confirm that the estimated uncertainties of heat flux and local wall temperature are 6.40% and 6.74%, respectively. Wicking coefficient is calculated through the post analyses using a propagation height image, which was calibrated with a pixel resolution of 0.1 × 0.1 mm2/pixel. For the experiments, we drop 5 μm DI water droplet on the nanopillar surfaces and record wicking behavior using high speed camera. And then we conduct image analyses by extracting the positional information of the wicking-front and the droplet edge (see Fig. 2(b) and (c) in manuscript). This image processing method has inherent uncertainty resulting from pixel resolution of images and time-step errors during the recording, which relatively correspond to spatial and temporal uncertainty aspects based on the camera’s specification. According to the definition of the wicking coefficient, we can analyze the uncertainty as a function of related physical factors as follows: 𝑊= ℎ𝑝 √𝑡 from ref. 16 and 17 𝛿𝑊 ( ) 𝑊 𝛿ℎ𝑝 = [( ℎ𝑝 2 ) 2 1⁄2 𝛿 √𝑡 +( ) ] . √𝑡 (S5) where W, x, and t mean the wicking coefficient, wicking distance, and time respectively. We took each error considering allowable maximum errors pertaining to image resolution and to exposure time as the spatial uncertainty and temporal uncertainty, respectively, in Eq. (S5). Each error was 3.47% and 3.11% of the image taken at 4 s, and thus the uncertainty of wicking coefficient was 4.60%. REFERENCES 1. Z. Huang, N. Geyer, P. Werner, J. de Boor, and U. Gösele, Adv. Mater. 23, 285 (2011). 2. A. Kosiorek, W. Kandulski, P. Chudzinski, K. Kempa, and M. Giersig, Nano Lett. 4, 1359 (2004). 3. K. Q. Peng, M. L. Zhang, A. J. Lu, N. B. Wong, R. Q. Zhang, and S. T. Lee, Appl. Phys. Lett. 90, 163123 (2007). 4. S. Kim, and D. Khang, Small 10, 3761 (2014). 5. J. R. Oh, J. H. Moon, S. Yoon, C. R. Park, and Y. R. Do, J. Mater. Chem. 21, 14167 (2011). 6. B. S. Kim, S. Shin, S. J. Shin, K. M. Kim, and H. H. Cho, Langmuir 27, 10148 (2011). 7. B. S. Kim, S. Shin, D. Lee, G. Choi, H. Lee, K. M. Kim, and H. H. Cho, Int. J. Heat Mass Transf. 70, 23 (2014). 8. S. You, J. Kim, and K. Kim, Appl. Phys. Lett. 83, 3374 (2003). 9. A. F. Mills, Basic heat and mass transfer, 2nd ed. (Prentice Hall, N. J., 1999). 10. F. P. Incropera, Fundamentals of heat and mass transfer, 6th ed., (John Wiley, N. J., 2007). 11. R. J. Goldstein, W. E. Ibele, S. V. Patankar, T. W. Simon, T. H. Kuehn, P. J. Strykowski, K. K. Tamma, V. V. R. Heberlein, J. H. Davidson, J. Bischof, F. A. Kulacki, U. Kortshagen, S. Garrick, and V. Srinivasan, Int. J. Heat Mass Transf. 49, 451 (2006). 12. Y. Haramura, and Y. Katto, Int. J. Heat Mass Transf. 26, 389 (1983). 13. L. N. Rainey, and S. M. You, Int. J. Heat Mass Transf. 44, 2589 (2001). 14. S. J. Kline, J. Fluids Eng. 107, 153 (1985). 15. K. Triconnet, K. Derrien, F. Hild, and D. Baptiste, Opt. Lasers Eng. 47, 728 (2009). 16. N. R. Tas, J. Haneveld, H. V. Jansen, M. Elwenspoek, and A. van den Berg, Appl. Phys. Lett. 85, 3274 (2004). 17. C. Ishino, M. Reyssat, E. Reyssat, K. Okumura, and D. Quéré, EPL 79, 56005 (2007).