ASEN5050_Project_Mars Trajectories_mac
advertisement

Mars Trajectories
Pil-Eun Kim
University of Colorado at Boulder
December 8, 2011
Abstract
The Mars is known as the most similar environment to the Earth and also attractive planet in
our solar system due to its possibility of the existence of life. Mars exploration has been
continuing since 1960 in the former Soviet Union and the United States. To send spacecraft
to Mars, it should escape gravitational field of the Earth through hyperbolic orbit at first, and
then entered into heliocentric transfer orbit (elliptical orbits). Lastly, spacecraft enter into
Mars orbit through hyperbolic orbit when it closed to Mars. Transfer orbit is more than 99%
of entire trajectory from Earth to Mars. This is the reason why transfer orbit should be
determined exactly. The topic of this research paper is about the trajectories from Earth to
Mars and launch window. Also, it will compare several types of trajectories and determine
what types of trajectories is most suitable based on ΔV and the relative positions of both
Earth and Mars in their orbits.
Introduction
Background
The universe is unlimited. If life exists only on Earth, the universe would be too inefficient.
Therefore, we imagine that there is a planet which life is existed somewhere, and try to
confirm it. There is the Mars, the starting line of the study of finding planets life exist. Mars
is the first superior planet from the earth, the fourth orbit around the sun, and it has the most
similar environment with the Earth. Mars mission started from Mariner program by the
United States. 'Mariner No.4" approached closely to the Mars and observed many craters on
the surface of Mars in 1965. From then, the Mars mission is continuing.
Fundamental Concept
Hohmann transfer
There are several basic aspects of planning interplanetary missions. We begin by
considering Hohmann transfer, which are the easiest to analyze and the most energy efficient.
The orbits of the planets involved must lie on the same plane and the planets must be
positioned just right for a Hohmann transfer to be used. The time between such opportunities
is derived.
The most energy efficient way for a spacecraft to transfer from one planet’s orbit to another
is to use a Hohmann transfer ellipse. The circular orbital speed of the Earth relative to the Sun
is
μs
v⨁ = √
= 29.7847 km/s
a⨁
and the semi-major axis of transfer orbit is
a⨁ + am
atrans =
= 188768604.5 km
2
Then, the transfer orbit velocity at perihelion is
vtransA = √
2μs
μs
−
= 32.7294 km/s
a⨁ atrans
Now, we can compute first delta-v for departure
△ v1 = vtransA − v⨁ = 2.9447 km/s
After impulse, the spacecraft propagates the transfer orbit and make second delta-v at
aphelion. The circular orbital speed of the target planet Mars relative to the Sun is
μs
vm = √
= 24.1294 km/s
am
and the transfer orbit velocity at aphelion is
2μs
μs
vtransB = √
−
= 21.4805 km/s
am atrans
Now, we can compute first delta-v for arrival to the Mars
△ v2 = vm − vtransB = 2.6489 km/s
and total delta-v for the Earth-Mars
△ vtot = |△ v1 | + |△ v2 | = 5.5936 km/s
The assumption for this is the orbital plane of the Earth and Mars lie in circular and coplanar.
However, the orbit planes of the solar system are not circular and coplanar. Therefore, we
cannot apply directly concept of Hohmann transfer as method of interplanetary mission.
Lambert Problem
One of the fundamental problems of interplanetary missions is to devise a trajectory for a
spacecraft that leaves one planet at a certain epoch and then arrives at a second planet at a
later epoch. In principle, these departure and arrival epochs may be chosen at will, but not
without a significant implication for the △ v required to implement such a transfer.
Lambert’s problem is a way to solve for the trajectory connecting two position vectors with
a given time of flight. ⃑⃑⃑
r0 and ⃑⃑rf define the positions of the initial planet (P0) at the time of
departure and the final planet (Pf ) at the time of arrival. With these positions and the time of
flight, solving Lambert’s problem will define the orbital elements of the transfer orbit. Once
the orbital elements of the transfer orbit are computed, the velocities at departure and arrival
may be found.
According to Lambert’s Theorem, the transfer time △t from P0 to Pf is independent of the
orbit’s eccentricity and depends only on the sum of the magnitudes of the position vectors,
the semi-major axis and the length of the chord joining P0 and Pf.
There are many solutions to Lambert’s problem that may be found in literature. This project
will use the Universal Variables Formulation.
Patched Conic Method
The patched conic concept an approximation avoids the three body problem in the transition
from central force field to another by using a series of two body solutions (conic section)
patched at the edge of the relevant sphere of influence. For example, a spacecraft would
escape from a departure planet on a planetocentric trajectory that would become a
heliocentric trajectory (with the Sun as the attracting force) as the spacecraft leaves the SOI
of the departure planet. This change from a planetocentric to a heliocentric trajectory is the
first patch. When the spacecraft intercepts the SOI of the target (or intermediate) planet, the
trajectory will become planetocentric again. This is the second patch. It is convenient to
divide a mission into phases that are connected by patches.
The patched conic concept that allows us to use simple two-body (central force) mechanics to
calculate velocity budgets for interplanetary travel. Even though these ∆V’s are approximate,
even order-of-magnitude values, they are extremely useful in mission planning and feasibility
analyses. Since they represent the energy that must be imparted to the spacecraft, they affect
the size and nature of the booster and propulsion systems. Furthermore, they can be used as
figures of merit to compare various transfers and capture schemes as was done with several
parking orbits around Mars.
Literature Search
1. Vallado, David A. “Fundamentals of Astrodynamics and Applications - Third
Edition”. Microcosm Press. Hawthorne, CA. 2007
2. Kemble, Stephen. “Interplanetary Mission Analysis and Design”. Springer.
Chichester, UK. 2006
3. Curtis, Howard D. “Orbital Mechanics for Engineering Students”. Elsevier
Butterworth-Heinemann. Burlington, MA. 2005
Problem of Interest
Importance of aspect to the mission
The required velocity for transfer from Earth orbit to transfer orbit is defined following
Δ V1 = VET - VE
Δ V2 = VM - VMT
where
Δ V1: required velocity vector from Earth orbit to transfer orbit
Δ V2: required velocity vector from transfer orbit to Mars orbit
V ET: velocity vector of transfer orbit at the position of the Earth
V MT: velocity vector of transfer orbit at the position of the Mars
V E: velocity vector of the Earth WRT the Sun
VM: velocity vector of the Mars WRT the Sun
There are two type of trajectory of transfer orbit. First, phase angle is smaller than 180 degree
and this is Type I. Second, phase angle is larger than 180 degree and this is Type II. Phase
angle is defined as the angle between the position of the Earth at departure date and the
position of the Mars at arrival date. Type I case spend less time comparing Type II. However,
Type II is effective in terms of the departure date.
The time period required for each planet has the proper alignment to initiate interplanetary
mission is called the synodic period.
μs
ne = √ 3 = 1.991 × 10−7
ae
Synodic period =
2π
ne −nm
μs
nm = √ 3 = 1.0586 × 10−7
am
= 6.7388 × 107 sec = 2.1354 yr
Importance of problem to the field of astrodynamics
Actually, the interplanetary mission from Earth to Mars is four-body problem. However, by
using the patched-conic method, we can approximate two-body problem considering only
spacecraft and the main gravitational force in each steps. The step is divided three stages and
it is great approximation.
- Earth departure: The equation of motion in this step is two-body problem only
considering Earth and spacecraft, and the trajectory is hyperbola. The effect of the
Sun and Mars is neglected.
- Heliocentric: The equation of motion in this step is two-body problem only
considering Sun and spacecraft, and the trajectory is elliptic. The effect of the Earth
and Mars is neglected.
- Mars arrival: The equation of motion in this step is two-body problem only
considering Mars and spacecraft, and the trajectory is hyperbola. The effect of the
Sun and Earth is neglected.
The design process for Earth-Mars trajectory is following:
- Determine the departure date of the Earth and arrival date of the Mars (Mission time)
- Compute exact position and velocity at these date using ephemeris
- Design the heliocentric transfer orbit from the Earth to the Mars
- Determine transfer orbit elements to match between mission time and time of flight
- Design hyperbolic orbit from Earth departure to transfer orbit
- Design hyperbolic orbit from transfer orbit to Mars arrival
The most important part of the whole interplanetary mission design is determining transfer
orbit. From the transfer orbit elements, we can calculate required delta-v velocity and the
relative velocity of the spacecraft with respect to the Sun.
Development of solution method
The transfer orbit of the Earth-Mars is a complete elliptic orbit, which is passing by the
position of the Earth at departure date and the position of the Mars at arrival date around the
sun. The flight time between two planets must be matched exactly the whole mission period
(arrival date on Mars - Earth departure date). Therefore, we should determine the transfer
orbit by calculating position and velocity iteration the true anomaly from the starting point to
destination point of an elliptical orbit, when the mission time and time of flight is exactly
matches.
The orbits of the planets in the solar system slightly vary its size, shape, location depending
on the time. This is due to perturbations by other planets, and this perturbation is an important
factor in calculating the positions of the planets. There are two methods for calculating
ephemeris. The first one is using the fixed reference coordinate system (J2000 coordinates),
and second is using mean vernal equinox direction.
The data are to be used in this project as described in the related document titled "Keplerian
Elements for Approximate Positions of the Major Planets" by E.M. Standish (JPL/Caltech)
available from the JPL Solar System Dynamics web site (http://ssd.jpl.nasa.gov/). The
keplerian elements and their rates are with respect to the mean ecliptic and equinox of J2000,
valid for the time-interval 1800 AD - 2050 AD.
We can present the heliocentric orbital of each planet with the ephemeris based on
reference as 2000/01/01.
Orbital Elements = a0 + a1 T + a2 T 2 + a3 T 3
The coefficients of above equation list following table, where a is semi-major axis, e is
eccentricity, i is orbital inclination, Ω is right ascending node, ω is perihelion longitude, and
the L is mean longitude with respect to heliocentric. T is time past from the reference epoch
(2000/01/01) in century unit.
T = [(Julian Day) -2451545] /36525
where 2451545 is Julian day at 2000/01/01.
a0
L
a
e
i
Ω
ω
L
a
e
i
Ω
ω
100.466449
1.000001018
0.01670862
0
0
102.937348
355.433275
1.523679342
0.09340062
1.849726
49.558093
336.060234
a1
Earth
+36000.7698231
a2
a3
+0.00030368
+0.000000021
-0.000042037
-0.0000001236
+0.00000000004
+1.7195269
Mars
+19141.6964746
+0.00045962
+0.000000499
+0.00031097
+0.000000015
+0.000090483
-0.0006010
+0.7720923
+1.8410331
-0.0000000806
+0.00001276
+0.00001605
+0.00013515
-0.00000000035
-0.000000006
+0.000002325
+0.000000318
We can get position and velocity of each planet from these orbital elements, and transform
from orbital coordinate (P, Q, W) to heliocentric coordinate (X, Y, Z).
The direction of vernal equinox is X axis on the plane of ecliptic, the perpendicular direction
of X axis is Y axis on the equatorial plane, and Z direction is X × Y. P and Q is
perpendicular each other on the orbital plane, where P indicates the direction of perihelion,
and W direction is P × Q.
P
X
[Y] = A3 (Ω)A1 (i)A3 (ω) [ Q ]
Z
W
cos Ω − sin Ω 0
A3 (Ω) = [ sin Ω cos Ω 0]
0
0
1
1
0
0
A1 (i) = [0 cos i − sin i]
0 sin i cos i
cos ω − sin ω 0
A3 (ω) = [ sin ω cos ω 0]
0
0
1
X
cos ω cosΩ − sin ω cos i sin Ω − sin ω cosΩ − cos ω cos i sin Ω sin i sinΩ
P
[Y] = [cos ω sinΩ + sin ω cos i cos Ω − sin ω sinΩ + cos ω cos i cos Ω −sin i cosΩ] [ Q ]
Z
sin ω sin i
cos ω sini
cos i
W
Px Qx Wx P
P
= [ y Qy Wy ] [ Q ]
Pz Qz Wz W
Then, the time derivation of above equation is
Px Qx Wx Ṗ
Ẋ
[Ẏ] = [Py Qy Wy ] [ Q̇ ]
Pz Qz Wz Ẇ
Ż
The position vector components in the orbital coordinate system and its time derivation is
P
a(cos E − e)
[ Q ] = [ b sin E ]
W
0
GM⨀ a
−√
sin E
a r
Ṗ
[ Q̇ ] =
GM b
Ẇ
√ ⨀ cos E
a r
[
]
0
The position vector components in the heliocentric coordinate system and its time derivation
is following
⃑⃗ sin E
⃑⃗(cos E − e) + bQ
r⃗ = aP
GM⨀ 1
⃑⃑⃗ cos E − aP
⃑⃗sin E)
⃑⃗ = √
v
(bQ
a r
⃑⃗ is position vector in orbital
⃑⃗ and Q
where a and b is semi-major axis, semi-minor axis, P
frame. The eccentric anomaly (E) is computed by Kepler Equation using Newton-Rapson
numerical method.
Calculate C3
The most considerable factor for the interplanetary mission design is C3 value. The C3 is
square of the velocity for departing the Earth and entering the heliocentric transfer orbit. This
value is important because it is related to the spacecraft performance and the maximum
containing fuel. Therefore, we consider proper C3 while designing the interplanetary mission.
C3 can compute by each vector component.
VE = (X1 , Y1 , Z1 ),
VET = (X2 , Y2 , Z2 )
where VE is relative velocity of the spacecraft at the date of departing the Earth with respect
to the Sun and VET is the require velocity for entering transfer orbit.
C3 = (X2 − X1 )2 + (Y2 − Y1 )2 + (Z2 − Z1 )2
Extension
The Mars program ‘Curiosity’ was launched on 2011/11/26. The estimated arrival date at
the Mars can be calculated under assumption of launching with minimum C3. The Type I
minimum C3 occurs 68 days later from 2012/05/26 (2012/08/04)
Type I
Type II
Minimu
m C3
< Keplerian elements of transfer orbit >
Departure date : 2011/11/26, Arrival date : 2012/8/4
Curiosity
Semi-major axis
189089650.4 km
Eccentricity
0.2235
Inclination
0.34 o
Right ascending node
243.58 o
Argument of perihelion
165.8 o
Phase angle
168.14 o
C3
11.6848 km/s
The Synodic period is about 2.1354 year, 780 day. Therefore, another opportunity is open
about January 2014. Therefore, the launch day for this project determine at 2014/01/01. Then,
an estimated arrival day set at 2014/07/01 after six month later.
The following figure is phase angle vs orbital inclination and C3. The inclination angle and
C3 values are sharply increased, when the phase angle is 180 degree. This is because the
inclination calculation used cross product of the position vector in the Lambert solution. 180
degree is the boundary between Type I and Type II. The inclination change around 180
degree is quite large, and the required delta-v velocity will be increase. This is due to the fact
that the Earth and Mars orbital plane doesn’t lie in coplanar.
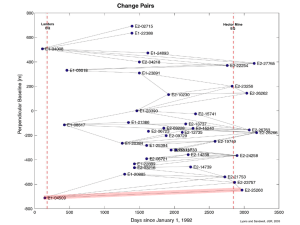
The following plot is varying departure dates from 2014/01/01 to 150 later dates
with x axis is arrival date and y axis is C3 values.
Type I
Type II
Minimu
m C3
The above figure shows the day the minimum C3 at 2014/01/01 as the departure day. The
arrival date for minimum C3 is about 55 days later at 2014/05/10 (2014/07/25).
The above is fork chop plot, represented C3, v∞ and time of flight. Through this chart, we
could determine proper departure date and arrival date with desired C3, v∞ and time of
flight. The yellow and green circle is minimum C3 and v∞ , different time of flight. The
yellow circle is Type I, time of flight is 210 days. The green one is Type II, time of flight is
310days.
Semi-major axis
Eccentricity
Inclination
Right ascending node
Argument of perihelion
Phase angle
C3
v∞
< Keplerian elements of transfer orbit >
Departure date : 2013/12/25
Departure date : 2013/11/30
Arrival date : 2014/07/30
Arrival date : 2014/10/10
186261838.18 km
186261838.18 km
0.2113
0.1945
o
1.9
2.31 o
273.8 o
68.19 o
172.36 o
19.52 o
158.18 o
226.58 o
9.3706 km/s
9.7736 km/s
4.7936 km/s
3.2969 km/s
< Type I, Departure date : 2013/12/25, Arrival date : 2014/07/30 >
< Type II, Departure date : 2013/11/30 Arrival date : 2014/10/10 >
Summary and Conclusion
The path of Earth-Mars trajectory is divided by three parts with patched-conic method; the
Earth departure hyperbola, transfer orbit from Earth to Mars, and Mars approach hyperbola.
The most important part of this transition is transfer orbit from Earth to Mars, and this is
determined by Lambert solution using the position vector. The solutions get worse, if the
phase angle between two position vectors is about 180˚, because Earth and Mars are not on
the same plane. The value of C3 increases 103 (km2/s2) levels due to grow the inclination of
transfer orbit. For determining the transfer orbit, the location of arrival and departure date is
important. Therefore, we should use the more accurate ephemeris.
By using arbitrary departure and arrival day, C3 values can be calculated. The fork chop
plot is effective in this step. We can determine departure and arrival date with desired
impulse by proper C3, v∞ . Then, derive transfer orbit and its kelperian elements. As a future
work, research about the trajectory of a hyperbolic element in the sphere of influence,
approach to the Mars orbit, and landing on the surface of Mars is needed.
Appendix – Matlab code
% Planet Orbit Software (2011.11.05)
clear all;
mu = 1.32712428*10^11;
% Keplerian Elements of Earth-Moon Barycenter
a_ear = 1.000001018*(1.4959787*10^8);
% Semi-major Axis (au)
e_ear = 0.01670862;
% Eccentricity
i_ear = 0.000001 * pi/180;
% Inclination (degree2rad)
L_ear = 100.466449 * pi/180;
% Mean Logitude (degree2rad)
dL_ear = 36000.7698231 * pi/180;
% Rate of Mean Logitude (degree2rad)
w_bar_ear = 102.937348 * pi/180; % Logitude of Perihelion from Vernal
Equinox (degree2rad)
N_ear = 0 * pi/180;
% Logitude of Ascending Node (degree2rad)
w_ear = w_bar_ear - N_ear;
% Logitude of Perihelion (rad)
% Keplerian Elements of Mars
a_mar = 1.523679342*(1.4959787*10^8);
% Semi-major Axis (au)
e_mar = 0.09340062;
% Eccentricity
i_mar = 1.849726 * pi/180;
% Inclination (degree2rad)
L_mar = 355.433275 * pi/180;
% Mean Logitude (degree2rad)
dL_mar = 19141.6964746 * pi/180;
% Rate of Mean Logitude (degree2rad)
w_bar_mar = 336.060234 * pi/180; % Logitude of Perihelion from Vernal
Equinox (degree2rad)
N_mar = 49.558093 * pi/180;
% Logitude of Ascending Node (degree2rad)
w_mar = w_bar_mar - N_mar;
% Logitude of Perihelion (rad)
% Gregorian => Julian
Y0 = 2000; M0 = 1; D0 = 1;
% 2000/01/01 -> reference day (J2000)
jd0 = julian(Y0,[M0 D0 0 0 0]);
% Convert to Julian day
Y1 = 2013; M1 = 6; D1 = 1;
% 2011/11/15 -> Today
jd1 = julian(Y1,[M1 D1 0 0 0]);
% Convert to Julian day
Y2 = 2013; M2 = 12; D2 = 1;
% 2049/12/31 -> End day (End day for
calculation)
jd2 = julian(Y2,[M2 D2 0 0 0]);
% Convert to Julian day
row = 0;
col = 0;
step = 10;
% time interval (day)
xspan = 50;
% time span of departure day from specific epoch jd1 (day)
yspan = 100;
% time span of arrival day from specific epoch jd2 (day)
for i = [jd1:step:jd1+2*xspan]
row = row+1;
JDi = i;
col = 0;
for j = [jd2:step:jd2+2*yspan]
col = col+1;
JDf = j;
con_x(row,col) = JDi - jd1;
con_y(row,col) = JDf - jd2;
jd = (jd1 + step*row) : (jd2 + step*col);
m(row,col) = (jd2 + step*col) - (jd1 + step*row);
% Compute Orbit Equation
[x_ear,y_ear,nu_ear] =
orbit(L_ear,w_bar_ear,jd,jd0,dL_ear,a_ear,e_ear);
[x_mar,y_mar,nu_mar] =
orbit(L_mar,w_bar_mar,jd,jd0,dL_mar,a_mar,e_mar);
% Transformation to 3-D (Logitude of Perihelion,Logitude of Ascending
Node,Inclination)
[r_ear_x,r_ear_y,r_ear_z] =
transformation(w_ear,N_ear,i_ear,x_ear,y_ear);
[r_mar_x,r_mar_y,r_mar_z] =
transformation(w_mar,N_mar,i_mar,x_mar,y_mar);
% Transfer Orbit
[pos_ini,vel_ini] =
randv(a_ear,e_ear,i_ear*180/pi,N_ear*180/pi,w_ear*180/pi,nu_ear(1)*180/pi);
[pos_fin,vel_fin] =
randv(a_mar,e_mar,i_mar*180/pi,N_mar*180/pi,w_mar*180/pi,nu_mar(m(row,col))
*180/pi);
R0 = pos_ini; R = pos_fin;
[v0 vf theta] = lambert_universal(R0,R,m(row,col)*86400);
coe_t = elorb(R0,v0);
incl(row,col) = coe_t(3);
phase_angle(row,col) = zeroto360(theta*180/pi);
C3_dep(row,col) = norm(v0 - vel_ini)^2;
vinf_arr(row,col) = norm(vf - vel_fin);
end
end
figure(1);
[C2,h2] = contour(con_x,con_y,C3_dep,[5:5:30,35,40,45,50],'r');
clabel(C2,h2); hold on;
[C3,h3] = contour(con_x,con_y,vinf_arr,[2.3,2.5,3:7],'b--'); clabel(C3,h3);
[C4,h4] = contour(con_x,con_y,m,[100:50:400],'k'); clabel(C4,h4); hold off;
xlabel(['Days from Nominal Earth Departure Date =
',num2str(Y1),'/',num2str(M1),'/',num2str(D1)]);
ylabel(['Days from Nominal Mars Arrival Date =
',num2str(Y2),'/',num2str(M2),'/',num2str(D2)]);
legend([h2(1),h3(1),h4(1)],'C3(km^2/s^2)','Arrival V_\infty (km/s)','Time
of Flight(days)');
figure(2);
subplot(2,1,1); plot(phase_angle,incl,'r.');
xlim([90 270]); ylim([-10 90]);
xlabel('phase angle (deg)'); ylabel('inclination (deg)');
subplot(2,1,2); plot(phase_angle,C3_dep,'r.');
xlim([90 270]); ylim([-100 1000]);
xlabel('phase angle (deg)'); ylabel('C3 (km/s)');
[a b] = size(con_x);
figure(3); color1 = colormap(hsv(a));
for k = 1:a
h1(k) =
plot(con_y(k,:),C3_dep(k,:),'color',color1(k,:),'DisplayName',sprintf('%d',
jd2+k)); hold on;
end
legend(h1); ylim([0 200]); ylabel('C3 (km/s)');
xlabel(['Days from Nominal Mars Arrival Date =
',num2str(Y2),'/',num2str(M2),'/',num2str(D2)]);