Springs (for holly)-1
advertisement
-1")
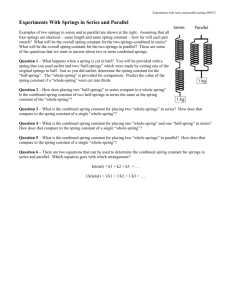
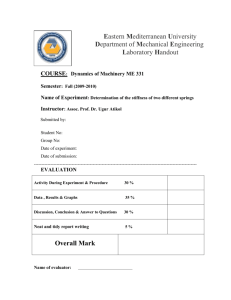
Basic Definition of a spring and simple functions In a simple sense a spring is an elastic object capable of storing mechanical energy. By this it is meant that a spring can absorb and transmit energy caused by motion usually in a linear or rotational manner. The three most common types of spring are compression springs, extension springs and torsion springs. Other less used types are constant force springs (also known as clock springs) and clips. Compression springs will most commonly be used to absorb motion of objects caused by an impact or due to oscillations or a combination of the both. A perfect and obvious example of this is that of a shock absorber Cars, Lorries and Vans have shock absorbers fitted designed to be capable of providing the most comfortable ride to providing the greatest performance. A standard road car will usually be designed to withstand minor impacts such as pot holes and general deformities in the tarmac road surfaces but not off road driving on gravel or dirt in more agricultural regions. Therefore the suspension setup will have certain design specifications and criteria setting a stiffness range that a spring and damping setup must be designed within. It is also fairly common to have a conjunction of a spring and damper in a given system. This is because a spring determines the amount of force that can be withstood where the damper determines the speed of compression and rebound. This is important as the amount of energy that can be stored (dependant on the spring) is usually second to the rate at which the energy can be stored (dependant on the damper). Extension springs work in the opposite manner that they aim to restrict the distance between two entities by providing a tension force opposing the force causing the distance between them to increase. A torsional spring is one that stores energy caused by twisting motion. A simple example would be that of a mousetrap. By applying a force perpendicular to the cross-section at the end of a coiled. Young's modulus and strength are two key properties in choosing a spring material. Engineers would refer to a library of materials and their properties when choosing a suitable material for any given design however a modulus/strength chart would be a suitable method of finding what type of material that would be required for the design. The modulus/strength chart can be seen below: As seen in the chart above the required material can be chosen based upon its basic properties. The issue with this chart is it only describes the maximum (tensile) strength the material can withstand and does not inform the user of the materials yield or fracture stresses, two very important considerations in spring design. Springs are designed to be elastic, this means that the amount of potential energy stored in the deformation of the object is exactly the same that is returned when the load is released, allowing the object to return to its original shape. The opposite of this is plastic deformation where the force applied causes the object to permanently deform as a result. The elastic region can be seen in the stress strain graph as the linear region whereas the plastic is the curved region past the yield point. The Young's Modulus can be considered as a measure of the stiffness of that material. It is the relationship between the amount of stress and strain a material can withstand (of a known geometry). Stress defined as the normal force (i.e. perpendicular to the surface at which it is applied) that can be with stood for given surface area and engineering strain as the ratio between the final deformation length (with the load still applied) to original length of the material in the direction that the force is applied. These relationships are shown mathematically below: 𝐸= 𝜎= 𝐹𝑁 , 𝐴 𝜎 𝜀 𝜀= Δ𝑙 𝑙0 E = Young's Modulus (Units: Giga Pascals/GPa) σ = Tensile/Compressive Stress (Newtons per square meter/Nm-2) ε = Tensile/Compressive Strain (unitless as it is a ratio of values consisting of same units FN = Normal Force (Newtons/N) A = Surface Area (Meters squared/m2) Δl = Change in length (Meters/m) l0 = Initial length (Meters/m) Detailed analysis of coil springs with calculations Hooke's Law: 𝐹 = 𝑘𝑥𝑒𝑞𝑢𝑖𝑣 k is stiffness xequiv the same as Δl from previous section in terms of springs This is a proportional relationship between F and xequiv as k is a constant Material that follows Hooke's law follows a linear-elastic relation meaning it will go up straight path of black and white graph on previous page and the then return back down as load is removed (as long as it does not pass yield in to curved area) Force of fully compressed spring: 𝐸𝑑4 (𝐿−𝑛𝑑) 𝐹𝑚𝑎𝑥 = 16(1+𝜐)(𝐷−𝑑)3 𝑛 http://www.engineering-dictionary.org/Spring http://en.wikipedia.org/wiki/Poisson_ratio http://en.wikipedia.org/wiki/Torsion_spring http://www.engineersedge.com/spring_terms.htm http://en.wikipedia.org/wiki/Spring_(device) http://en.wikipedia.org/wiki/Young's_modulus http://www.mitcalc.com/doc/springs/help/en/springs.htm