307_Wk12
advertisement

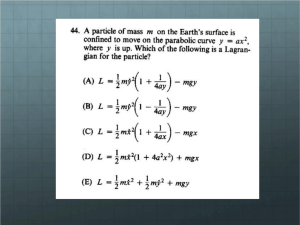
LECTURE NOTES FOR PHYSICS 307: CLASSICAL MECHANICS TEXT: THORNTON AND MARION'S CLASSICAL MECHANICS OF PARTICLES AND SYSTEMS SOME USEFUL REFERENCE STUFF: Greek alphabet, metric prefixes, conversion factors ASIGNMENTS: (Subject to change: check back often.) HW#9: Due Friday, Nov. 21: Calculate the Lagrangians for Problems 7.7, 9, 12, 15. "Dailies": Tuesday, Nov. 11: Fill in the steps for the GRIN lens in the Fermat handout. Tuesday, Nov. 18: Calculate the Lagrangian for Problem 7.7. WEEK 12: GO TO LECTURE 20 (Thursday is Exam II.) LECTURE 20: SECTION 7.1-6 (Return to top.) Let's just leave this class for working examples of Euler's equation for now. By the way, here are some further notes (from Jim Wiss at University of Illinois at Urbana-Champaign) on Euler's Equation. FERMAT'S PRINCIPLE: This equation allows us to do a number of interesting optimization problems in addition to the lifeguarding problem that I described. It allows us to solve problems involving Fermat's Principle, that is, using the fact that light follows a path which optimizes (in most cases minimizes) the time it takes to get from one place to another. The lifeguarding problem is thus completely analogous to the problem of refraction of light at the interface between two transparent materials. Click here for more notes from your instructor. THE BRACHISTOCHRONE: Another important application of Euler's equation is the brachistochrone. This is the solution to a problem which asks what shape Hot Wheels track will allow a car to get from one position to another as quickly as possible. This sounds like much too obvious a question, and your first guess might be a straight line. The problem with a straight line is that if the car could descend quicker, it would pick up more speed and get where it's going faster. We will look at the brachistochrone problem and maybe even set up some Hot Wheels track to test our solution. Click here for more notes from your instructor. Euler's equation can be put to good use in calculating the motion of objects. The question is what is the quantity, J, that needs to be optimized in order to apply Euler's equation? The answer to this is not the least bit obvious, but happens to be the time integral of a quantity which we will call the "action". There is a principle that states that objects move in such a way as to minimize this quantity called "action". This is known as "The Principle of Least Action" or Hamilton's Principle. What is this thing called action? This is another example of physicists hijacking some normal word from the English language and using it to to mean something very specific that has nothing to do with are common-sense notion of what that word means. Action as defined by physicists is nothing more than the difference between the kinetic energy and potential energy L T U We can now apply Euler's equation to the principle of least action, replacing x with time, and replacing y with x. We can further generalize things by allowing the action to depend not on a single coordinate, x, but on a whole range of coordinates. We will generalize these and call them qj. For each of these coordinates, we get an equation which we will call Lagrange's equation of motion: f d f 0 q j dt q j It is much harder to explain why Hamilton's principle is equivalent to a Newtonian physics than to simply show that you can derive Newton's laws from Hamilton's Principle. This is done in Section 6-9. One of the most convenient things about the Lagrangian formalism that we've just introduced is these generalized coordinates. The qj's can stand for coordinates such as x, y, and z. But they can also stand for all r, θ, and φ. Even better, generalized coordinates can stand for the coordinates of a second or third object. Just be aware that the more generalized coordinates there are in a problem, the more Lagrangian equations you will be required to solve We will do a bunch of problems using Lagrangian formalism, mostly just setting up the differential equations to be solved. The problems for which you need to use Lagrangian formalism -- because Newton doesn't work -- are generally so difficult that the differential equations are a ton of work. The important thing that I want you to get out of this chapter is the ability to look at particular problems from this new perspective and to set up the mathematics, not necessarily practice in solving the diff eqs. SECTION 7.5: UNDETERMINED MULTIPLIERS Skip this. SECTION 7.6-9 Read these sections carefully. They point out the equivalence of Newtonian and Lagrangian dynamics. If they are equivalent, you should be able to choose to do one or the other depending on which one is easier. For what kinds of problems is the Lagrangian method easier? Generally, for problems that involve coupled objects. Here are some examples --- we will set up a number of these. Two masses connected by a a string over a pulley, a block sliding down a triangular wedge which is free to slide on the table below it, a mass at the end of the spring which is swinging like a pendulum, a block on an inclined plane where the angle of the inclination is varying with time. These are the kinds of problems that mechanical engineers in particular get an awful lot of practice doing as undergraduates. If you're planning to study mechanical engineering, look very closely at these examples. You will be seeing more of them. By the way, we will be using Lagrangian Dynamics in Chapter 8 when we look at orbital motion: there is an immediate payoff to all this work. THURSDAY: GOOD LUCK ON THE EXAM! YSBATs Return to syllabus Return to Koon’s homepage