Rotational motion - Ms. Devaney`s classes at Pearson
advertisement

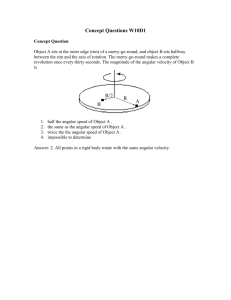
Biomechanics How physical forces affect human performance. Equilibrium and the Conservation of Energy Sir Isaac Newton’s First Law states that an object at rest will remain at rest unless an external force is applied to it. Newton’s Second Law states that a force applied to a body causes an acceleration of that body of a magnitude proportional to the force, in the direction of the force, and inversely proportional to the body’s mass. F = ma (Force = mass x acceleration) A body’s centre of mass is the point at which the mass of a body seems to be focused. For males, this point is higher in the body (toward the chest due to the greater mass in the chest and shoulders; for females, this point is lower in the body (toward the hips due to the greater mass in the hips and legs). Newton’s Third Law states that for every action, there is an equal and opposite reaction. The conservation of energy principle states that energy can never be created or destroyed, but can only be converted from one form to another. Types of Motion Linear and rotational motion: Comparable concepts Linear Motion Displacement Velocity Acceleration of a mass Force Mass Rotational Motion Angular displacement Angular velocity Angular acceleration Moment of force (torque) Moment of inertia a) Linear (or translational) motion: Is movement in a particular direction. Example: when a sprinter accelerates down a track; or a hockey player quickly veers to go around another player. Force is generated by the athlete’s muscles and the resulting motion is in a straight line. Acceleration (a change in velocity) occurs in a straight line. If an athlete starts from a stationary position, then accelerates down the field, the basic physics involved (F=ma) are straightforward. However, if the motion is not in a straight line (ie: a wide receiver in football) we need to use the notion of a force as a vector (a force as a push or a pull of a certain magnitude in a particular direction). For example: a vertical force and a forward force create a diagonal force acting on the body’s centre of mass. b) Rotational motion: Refers to movement about an axis. Unlike with linear motion, in rotational motion the force does not act through the centre of mass, but rather is “off centered” and this results in rotation. Example: kick a soccer ball through its centre of mass and it goes in a straight line. However, kick a soccer ball “off centre” and the ball will rotate or spin. In rotational motion, the body (or a part of the body) spins around an axis. With rotational motion, instead of acceleration of a mass, there is angular acceleration. Instead of force, there is the moment of force (torque). Finally, rather than mass as a measure of inertia, there is what is referred to as the moment of inertia (rotational inertia). Torque (the moment of force) is the tendency of a force to create a rotation around an axis. A force can be thought of as a push or a pull; torque can be thought of as a twist. Torque is a measure of how much a force is acting on an object to cause the object to rotate. The moment of inertia refers to the resistance to rotation. The larger the moment of inertia, the larger the moment of force needed to maintain the same angular acceleration. o The moment of inertia depends on the distribution of the mass in relation to the axis of rotation. The further away the mass is from the axis, the greater the moment of inertia (and therefore, the harder it is to cause it to spin or to stop it from spinning). The closer it is to the axis of rotation, the easier it is to rotate it or to stop it from rotating. The average distance from the axis of rotation is called the radius of gyration. Examples of Rotational Principles A figure skater starts to spin with her arms out to her side. This is a larger radius of gyration and makes the spin slow. It therefore has a large moment of inertia. However, once the figure skater brings her arms tight into her sides, she spins much faster. Her radius of gyration is smaller; she is spinning very quickly, and her moment of inertia has decreased. The skater’s spin (angular velocity) has greatly increased. Finally, to slow down, she extends her arms, to increase both her radius of gyration and moment of inertia, and she can now stop the spin. Following a series of rapid somersaults in a tight position (so that the radius of gyration is short, and the moment of inertia is low and angular velocity is high), a gymnast does a forward flip with the body positioned more straightly. By opening up, she increases the moment of inertia by increasing her radius of gyration. This results in a decrease in her angular velocity due to the increase in her moment of inertia. A diver curls tightly to reduce his radius of gyration, which reduces his moment of inertia and quickly increases his angular velocity. Before he enters the water, he opens up into a straight position. This immediately lowers his angular velocity since he increased his moment of inertia – now he will enter the water safely. Biomechanical Innovations: a) The “Fosbury Flop” Until the mid 1960’s, high jumpers attempted to go over the bar running toward it, then straddling the bar to get over. The Fosbury Flop has many advantages over the older method. As the athlete approaches the bar, he or she arches the neck and back, keeping the centre of mass relatively low in comparison to the other method. This allows the jumper to apply the ground reaction force over a longer period of time and to achieve greater vertical velocity and a higher jump. b) The “Jump Serve: In the 1980’s, the jump serve was introduced in volleyball. Before this, players would stand stationary and serve the ball overhand or underhand. In the jump serve, the player stands well behind the service line, lobbing the ball forward, and the runs and jumps high into the air to “spike” the ball over the net. This transfer of forward momentum makes the serve much faster, which makes it harder to receive. Also, the ball is travelling at a much higher point, which also makes it harder to return. Lever Systems Every movable bone in the human body, acting alone or with others, is part of a lever system that facilitate movements. There are 3 classes of levers – based on the location of the fulcrum (the pivot point of the lever) o In Class I levers (example: a teeter-totter), the fulcrum (axis) is located between the force (effort) and the resistance (load). Another example is the neck moving from a flexion to extension. The fulcrum is near the mastoid process, the force is the trapezius muscle contracting, and the load is the mandible moving upward. Other examples are: scissors, and rowing a boat. Class I levers are the weakest of all levers. o In Class II levers (example: a wheelbarrow), the resistance is between the force and the fulcrum. There are few Class II levers in the body. The ankle joint is an example. The fulcrum is in the ball of the foot; the force is the gastrocnemius muscle pulling on the calcaneus to plantar flex the foot; the calcaneus is the load (resistance). Class II levers can lift large amounts of weight. o In Class III levers (example: snow shoveling), the force is between the fulcrum and the resistance. This is the most common type of lever in the human body. The muscle force can be near the joint (fulcrum) but the force is always between the join and the resistance. An example is the bicep-elbow complex. The fulcrum is the elbow; the force is the bicep muscles pulling the forearm (the load/resistance) upward. Class III levers permit speed of movement. The three classes of levers Seven Principles of Biomechanical Analysis: The building blocks of exercise 1) Stability is the ability to maintain one’s balance. Stability increases with a: lower the centre of mass, the larger the base of support, the closer the centre of mass to the base of support, and the greater the mass. Example: You are more stable (harder to move) when you are in a spread out stance (large base of support), and lower your body toward the ground (lower your centre of mass and move your centre of mass closer to your base of support). Example: You are less stable (easier to move) when you are on your toes (higher centre of mass), and your feet are close together (small base of support). Example: A lighter person (less mass) is easier to move than a heavier person (more mass). 2) The production of maximum force requires the use of all possible joint movements that contribute to the task’s objective. The more joints coming into play in a given skill, the more muscles there will be to contract. This will lead to a greater force being exerted. Example: Throwing a shot put while just standing still and only using the force of your arms will not create as large a throw as it would if you bend down, rotate and use the force from your legs, through your torso and then through your arms to throw the shot put. Example: In golf, beginners rely too much on their arm strength as a way to hit the ball a great distance. Experienced golfers know to use the “integrated swing” in which the momentum and force begins in the legs, rotation of the pelvis, hips, torso and finally, this maximum force moves through the upper body and through the arms to create maximal force when you hit the golf ball. 3) The production of maximum velocity requires the use of joints in order from largest to smallest. Maximum velocity begins with the start of the movement and the beginning of the production of force in the larger joints (ie: the legs). The momentum and force move from the larger joints to the smaller joints. As the momentum and force move upward, peak speed is reached. Example: Tennis players use the power from their legs to transfer force and momentum through their body so that maximum velocity of movement is reached at the exact moment of impact with the ball. A jump shot in basketball comes from the legs. The larger joints of the leg begin the shooting motion as the player pushes off the floor. The other joints in the body (the smaller joints that move faster- the pelvis, trunk, shoulders, elbows, wrists then fingers) gain the transferred momentum and force until it reaches the fingers and exits with a proper follow through. 4) The greater the applied impulse, the greater the increase in velocity. Momentum refers to the amount of motion developed by an athlete (or object). Impulse refers to the application of force over the segment of time which results in a change of momentum. Streamlining refers to minimizing the surface area of an object in the direction of motion. It also involves making this surface area as smooth as possible so that the flow of air (or water) past the object is also smooth. When an activity requires a maximal application of force, the joint involved will go through a longer range of motion. The more of a range of motion your joint undergoes, the more force and velocity that joint can create. Example: A basketball player bends their knees the deepest while gathering themselves for takeoff to perform a dunk. Example: a high jumper crouch down low right before the run up to the bar. 5) Movement usually occurs in the direction opposite that of the applied force. Known as the principle of the direction of the application of force; it is closely related to Newton’s 3rd law: every action has an equal and opposite reaction. In sports, this principle is relevant whenever an athlete pushes against any playing surface or piece of equipment. When an athlete exerts a force, the surface pushes back with the same force, and in the opposite direction. Example: Reducing the “bobbing” while running – means to reduce the vertical force and concentrate instead on developing an efficient stride that moves forward. Example: This is why swimmers wear streamlined full-body swimsuits to reduce the force against them in the water. Example: This is why runners or cyclists “tuck in” behind others when facing a stiff head-wind. This allows them to not have such a strong force to overcome against them. 6) Angular motion is produced by the application of a force acting at some distance from an axis, that is, by torque. Angular motion is the circular motion that occurs around an imaginary line called the axis of rotation. The axis of rotation is through the body when you are doing a spin in skating. The axis of rotation is through the hips when performing front or back flips. The 3 key principles of angular motion are: angular velocity, moment of force or torque, and moment of inertia. Angular velocity is the rotational velocity of an athlete or his/her body segment in the performance of a movement (just how fast that body part is rotating). The application of torque produces changes in angular motion. Body segments rotate when muscles produce torque around a certain axis of rotation. Being able to put a spin on an object is key to many sports. For example: A curve ball in baseball; putting a top or back spin on a tennis serve. Spins occur when off-centre forces are imparted at the moment of release and/or impact. Athletes also impart the off-centre force in the form of body contact. For example: In a hockey body-check, or when a football player tackles an opponent – the idea is to knock your opponent off his or her centre of mass to create a loss of balance. 7) Angular momentum is constant when an athlete or object is free in the air. Also known as the principle of conservation of angular momentum. Once an athlete is airborne, he or she will travel with a constant angular momentum. Example: When a diver rotates in the air after leaving the diving board, his or her angular momentum is constant while in the air. A change to the rate of rotation only occurs when the diver repositions his or her limbs or trunk. Therefore, the 7 principles of biomechanical analysis are created from the following 4 broad categories of exercise: a) Stability b) Maximum Effort c) Linear Motion d) Angular Motion Biomechanical Formulas Force = ma (mass x acceleration) Impulse = F (tf – ti) Acceleration = (vf – vi) / t Impulse-Momentum Relationship: F (tf – ti) = mvf - mvi Momentum = mv (mass x velocity) Applications of Applied Biomechanics There are 3 areas of interest within applied biomechanics a) Performance improvements: o Coaches and athletes are focuses on “performance improvement” within the aspects of technique and sport training. Application 1: The Pre-Stretch o An analysis of many skills shows that an athlete’s first action is in the opposite direction. In this preparatory phase (or wind up/pre-stretch) the muscles are stretched prior to using the muscles for a joint action. The amount of force produced by a muscle is related to its length. The optimum tension that can be generated will occur when the active muscle is slightly greater than its resting length. The total tension (both passive and active) work together to facilitate force output from the muscle in movement. Application 2: Training – Plyometrics o Plyometrics are essential to athletes who jump, lift, sprint or throw. Plyometrics are exercises that enable a muscle to reach maximal strength in as short a time as possible (power). Examples of plyometrics include bounding, multiple hops and jumps, box and/or depth jumps, and medicine ball exercises for the upper body. The movement must be preceded by an eccentric (lengthening) contraction. Eccentric lengthening (before rapid concentric shortening) produces the greatest force and power capabilities. The faster the muscle is lengthened, the greater the concentric force after the stretch. Application 3: Equipment Design o A good example is how the golf club has evolved to enhance the golfer’s ability to perform. The longer the club, the farther the ball will travel. This is because the angular speed of the club head that transfers velocity to the ball. Also, the moment of inertia depends on the position of the mass in relation to the axis of rotation. This is why the head of the golf club is now heavier. This will increase the moment of force and angular acceleration. b) Injury prevention and rehabilitation: o Sports medicine specialists, trainers, and injured athletes in relation to “injury prevention and rehabilitation”. Application 1: Injury Risk Assessment o Injuries to muscles, tendons, ligaments, and joints can occur when the muscle is overloaded rapidly, during an eccentric contraction to control momentum, when it is fatigued, or when it is used over a long duration. Application 2: Controlling Momentum o Muscles are responsible for routine joint movements as well as generating speed in the body; muscles slow down a fast-moving segment; and stabilize a joint. Muscles used to terminate a range of motion are at risk because they are eccentrically to slow or “brake” a limb or body segment that is moving very quickly. Example: The rotator cuff as they slow the arm down in the follow-through phase of a throw; the hamstrings slowing the hip flexion of a soccer kick. Application 3: Lifting an Object o c) This involves the movement of the upper body as it rotates at the hips. If the spine and pelvis are stable, the force created by the hip extensors (gluteals) is transmitted by the erector spinae along the length of the spine to the upper limbs, when then delivers the force to the object being lifted. Also, positioning the object to be lifted closer to the body (and the fulcrum – axis) requires less torque during the lift. Fitness and personal training: o The field of “fitness and personal training” biomechanical analysis can be applied both to exercise and to equipment. Application 1: Gaining Leverage o If you’re having difficulty with an exercise, or want to make it more challenging, you can adjust the intensity by changing the lever system. Your body is a series of lever systems – the joint is the fulcrum, the bones are the lever that moves around the fulcrum, and the muscle contraction is the force applied to the lever, while the weight of the body part plus any external weight being lifted represent resistance to the force. As the resistance moves closer to the joint, the muscle will have an easier time moving it. Application 2: Generating Tensile Force o o o The maximum force that a muscle is capable of developing depends on several factors, including the length of the muscle, the type of contraction, and the velocity of the muscle contraction. The mechanics of contraction within the sarcomere determine the relationship between the velocity of a muscle’s contraction and its maximum force of contraction. The tensile force is proportional to the number of myosin crossbridges attached and pulling on actin filaments. Higher tension is developed at slower velocities of shortening. This is why you can quickly lift a 5 pound weight, but not a 25 pound weight. However, a muscle contracting eccentrically or isometrically is capable of producing more force than a muscle contracting concentrically. This is why you need a spotter in weight training – the tension developed in the eccentric contraction is greater than the maximum tension that could be developed in the isometric or concentric contractions. Application 3: Evaluating Resistance Machines o o Resistance machines should closely replicate the path of motion of the body and add appropriate resistance throughout the range of safe motion. Resistance equipment should consider the following: Type of lever: If the weight machine mimics a class III lever, the force is between the resistance and the axis of rotation. This would mean that the weight has to move through a greater distance, which leads to greater inertia. Therefore, the lifter has a harder time starting and ending the movement. Axis of rotation: This axis on the machine should match the axis of rotation of the joint in use. If not aligned, there will be undue forces on the joint that can result in injury. Path and range of motion: Machines should follow the normal path of motion of the joints that they are trying to work. Is the joint path straight or curvilinear? Machine resistance matching joint strength: Each joint movement has an associated strength curve. To accommodate this unique strength curve, equipment is designed with “cams” which are elliptically shaped pulley-like mechanisms on which the cables or belts travel. The cam changes how heavy the weight feels through the range of motion.