19) SuperResolutionMethods(3-1
advertisement
 SuperResolutionMethods(3-1")
ECEN 4616/5616
3/1/2013
What is Superresolution?
1. Recovering information beyond the diffraction limit of the optics.
a. Analytic Continuation: Surprisingly, superresolution is theoretically possible, for
a normal optical system. The theoretical proof of this involves the concept of
analytic continuation, described on subsequent pages. Unfortunately, the signalto-noise limitations of most optical systems prevent this method from being
practically useful at this time.
b. Near-field optical scanning: This involves scanning a sub-wavelength aperture
in close proximity to the object being imaged. Analysis and experiment show that
some light will pass through an aperture that is much smaller than the
wavelength:
Object
Sub-λ aperture
Incident light
Detector
Scan the aperture
or object
Near-field scanning has a very limited depth of field – however research has
shown that a correctly designed array of sub-wavelength apertures can have a
DOF several times larger than a single aperture, while maintaining subwavelength resolution.
c.
Lucky Imaging: This refers to the process where an optical system that is
imaging through a turbulent medium occasionally records spatial frequencies of
objects that would normally be beyond the system’s cut-off frequency (diffraction
limit). Conceptually, this works as shown below:
“Lucky” Ray Path
Object
Normal Ray Path
Random Phase Distortion
What the figure shows is the random distortion momentarily acting as an
objective lens, and the camera is then the “eyepiece” to a much larger (and
higher resolution) optical system. For this instance, the “lucky” image will appear
in front of the normal focal plane.
Other possibilities are:
The phase distortion creates a magnified image of the object
The phase distortion creates a real image of the object, closer to the
camera. (In this case, the image would appear behind the normal image
plane.)
Before dismissing this as extremely unlikely, it should be noted that all of the
above and much more has been observed in mirages – a situation whereby the
atmosphere creates random optical systems capable of stunning effects.
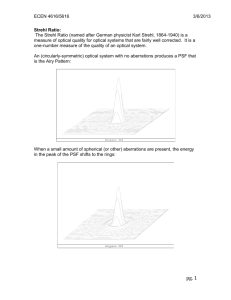
2. Recovering information about a known object that is not explicitly present in the
image:
For example, if it is known that the object is a point source, how accurately can the
position of the PSF be determined on the detector plane? If the PSF falls only on one
pixel, the answer is “one pixel accuracy”. If the PSF is oversampled, however – say it
pg. 1
ECEN 4616/5616
3/1/2013
covers an area of 10x10 pixels – then, since the form of the PSF is known (the Airy
pattern), its central location can be determined to a small fraction of a pixel, given
sufficient SNR.
The Rayleigh Criteria for resolution of a telescope is based on this principle. The radial
𝜆
(angular) distance from the peak of the Airy pattern to the first null is 1.22 . Rayleigh
𝐷
made the judgment call that, given the SNR of then-current telescopes and the human
eye as detector, two Airy patterns could be just distinguished if the peak of one fell on the
𝜆
first null of the other. Hence 1.22 is the angular resolution of a telescope for point
𝜆
𝐷
sources (and 1.22 𝑓 is the distance the two patterns will be separated on a focal plane).
𝐷
This method can be extended to objects other than point sources, as long as they are
known. For example, a sharp edge can be located to much less than a pixel’s width, as
long as the image model is correct and the edge image extends over multiple pixels.
There are a number of optical systems and research on this subject. At CU there are
experimental setups that have shown the ability to locate single fluorescent molecules to
𝜆
≈
in x, y, and z. (The z-location was done by engineering a pupil distortion which
100
caused the PSF to be asymmetric and rotate with defocus.)
3. Fluorescent methods: There are a number of methods of exciting fluorophores in
regions smaller than what can be addressed by a normal PSF. They are identified by an
acronym salad of designations such as STED, PALM, STORM, etc.
We will describe STED (Stimulated Emission Depletion) microscopy – those interested
can look up the others.
The method uses fluorophores which can be excited at one wavelength, and inhibited at
another wavelength – both exciting and inhibiting wavelengths must be distinct from the
fluorescent wavelength, so that they may be separated before detection.
Both the exciting and inhibiting wavelengths are projected onto the sample. The
resolutions and intensities are arranged such that the exciting wavelength exceeds the
effect of the inhibiting wavelength only in a very small central region of both PSFs. This
is the region where fluorescence will occur, and can be made significantly smaller than
any possible PSF through the optics.
Region of fluorescence
Inhibiting wavelength
exciting wavelength
pg. 2
ECEN 4616/5616
3/1/2013
Taylor Series and Analytic Continuation:
The Taylor series expansion of a function about zero (also called the Maclauran expansion) is
defined as:
𝑥2
𝑥𝑛
𝑓(𝑥) = 𝑓(0) + 𝑓 ′ (0)𝑥 + 𝑓 ′′ (0) + ⋯ + 𝑓 (𝑛) (0)
+⋯
2!
𝑛!
Any function which is equal to its Taylor expansion inside a convergence disk,|𝑥| < 𝑅, is called an
analytic function on that disk. If a function is equal to its Taylor expansion for all x, it is called an
entire analytic function.
Sin(x), cos(x) and ex are all entire analytic functions.
Why does the Taylor expansion work? The Taylor expansion of a polynomial is just the
polynomial. For example:
𝑙𝑒𝑡 𝑓(𝑥) ≡ 𝑎𝑥 2 + 𝑏𝑥 + 𝑐
Then, 𝑓(0) = 𝑐, 𝑓 ′ (0) = 𝑏, 𝑓 ′′ (0) = 2𝑎,
𝑥2
and the Taylor expansion is: 𝑐 + 𝑏𝑥 +2a = 𝑓(𝑥)
2
So, saying that a function is analytic is equivalent to saying it can be represented by a (possibly
infinite) polynomial – and the Taylor theorem tells that knowledge of such a function’s value and
derivatives at a single point is equivalent to knowledge of the entire function.
Analytic Continuation and Superresolution:
From the point of view of an optical system, an object is just a pattern of light. This pattern could
be decomposed (via the Fourier Transform) into an expression involving only complex
exponential functions.
The imaging system relays a band-limited copy of the object light pattern to the detector, where it
is captured as an image. Compared to the object (considered as a 2D light pattern), the image is
a copy of the lower spatial frequencies of the object, but the higher spatial frequencies are not
passed by the optical system.
As Goodman shows (“Introduction to Fourier Optics, p. 134), the Fourier transform of such an
image (or the object’s light pattern) is an entire analytic function. The reasoning goes like this:
The Fourier Transform is a sum of sin functions; Each individual sin function can be represented
by a Taylor polynomial, hence the entire Transform can also be so represented, since a sum of
polynomials is itself a polynomial. Hence, the Fourier Transform of an image is an entire analytic
function.
What this implies is that a sufficiently accurate knowledge of a portion of the image Fourier
Transform (e.g., the lower spatial frequencies) can be used to restore the unknown higher spatial
frequencies by means of extrapolation with a 2D Taylor polynomial (or similar method) derived
from the known data. This process is known as analytic continuation.
There are hundreds of theoretical papers on this subject – and even some actual experimentation
– covering many different methods of achieving resolutions beyond the passband of the optics.
Alas, the results are not currently spectacular – given the Signal-to-Noise ratios achievable with
optical systems and detectors, the degree of successful extrapolation is only a few percent
increase in resolution.
pg. 3
ECEN 4616/5616
3/1/2013
Discrete analog to analytic continuation:
In a system where all the data is discretely sampled, such as an image from a pixilated detector
or its Discrete Fourier Transform, the derivatives are estimated by means of finite differences
between the data samples.
Finite Differences:
Let F be a sequence of numbers:
𝐹 = {⋯ , 𝑥−3 , 𝑥−2 , 𝑥−1 , 𝑥0 , 𝑥1 , 𝑥2 , 𝑥3 , ⋯ }, and 𝐹𝑛 ≡ 𝑥𝑛
Then, using simple central differences to approximate derivatives, we have:
𝐹0′ =
𝐹0′′ =
𝑥1 − 𝑥−1
2
′
𝐹1′ − 𝐹−1
𝑥2 − 2𝑥0 + 𝑥−2
=
2
4
(3)
=
(4)
=
𝐹0
′′
𝐹1′′ − 𝐹−1
𝑥3 − 3𝑥1 +3𝑥−1 −𝑥−3
=
2
8
(3)
𝐹0
𝐹1
(3)
− 𝐹−1
𝑥4 − 4𝑥2 + 6𝑥0 − 4𝑥−2 + 𝑥−4
=
2
16
& etc.
Another, more compact way to calculate the nth finite difference, is to fit a polynomial of at least
order n to the data. (Since you are trying to estimate the nth derivative, the polynomial must have
a non-zero derivative of the same order.) Such a polynomial will require knowledge of at least
n+1 points of the sequence – or n different from the point about which you are calculating.
Hence, in discretely sampled data, knowledge of the higher-order finite differences about a single
point in a sequence is equivalent to knowledge of other points in the sequence distant from the
evaluation point.
pg. 4
ECEN 4616/5616
3/1/2013
Field Curvature and Scan Relays:
Constructing an x-y scan relay using one-axis galvanometer-driven mirrors involve at least 4
positive lenses. This likely to add a positive Petzval sum to the system, resulting in a scan plane
with negative curvature.
The possible solutions are:
1. Design the scan lenses as triplets, say, such that they have a negligible Petzval sum. It
might be possible to purchase commercial scan lenses with these characteristics.
2. Design the scan objective to have a negative Petzval sum to counter the curvature added
by the scan relay(s).
3. Put an afocal lens group in the system, at or near a relay point, designed to negate the
field curvature added by the scan relays:
Here is a pair of lenses which have zero power, but add positive curvature (negative
Petzval sum) to a parallel beam:
These lenses were found by starting with two plano-convex lenses, using Pickups in the LDE
(above) to ensure that the result was symmetric, curving the image plane in the desired direction,
and then using the Default Merit Function to solve for a solution. Different starting points, or more
lenses (perhaps with different glasses) will give different (and possibly better) solutions.
pg. 5