The equation of motion for a cart on a track can be described by Eq #
advertisement

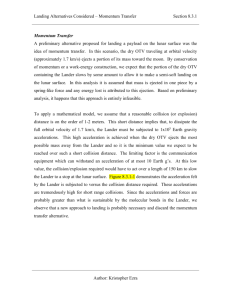
Launch Vehicle – Attitude determination in LEO Section A5.2.3, Page X A5.2.3 - Attitude determination in LEO Finding the upper and lower bound on attitude control requirements is a relatively straight forward but geometrically intensive task. These bounds are a driving feature for determining exactly how accurate attitude control systems should be to enable continuous communications with ground stations. Previously in section 5.2.3 we present 0.5 degrees as a satisfactory value for attitude determination accuracy; however, this number is very generic and is only practical since the antennae on the OTV are allowed to move. This section focuses on the worst case scenario: a fixed antenna. By inspection, the upper and lower bounds of attitude control accuracy come from the OTV viewing a ground station on the horizon and the OTV viewing a station from directly overhead respectively. We will first calculate the lower bound on accuracy which will show the worst possible accuracy in attitude determination allowed for the OTV to ever make contact with a ground station. Accuracy Lower Bound: In the lower bound case, the two dots (one representing the OTV and the other representing the ground station) as shown in fig. A5.2.3.1 share a radius from the center of the Earth. The fixed antenna has an angular range of 25° and at the time of analysis occupies an orbit 200 km above the surface of the Earth. This situation is completely geometrically defined. At this point, we calculate the angular width of the receiving antenna, α°, which has a diameter of 26 meters according to contacts in the communication group (Dixon). Author: Kristopher Ezra Launch Vehicle – Attitude determination in LEO Section A5.2.3, Page X 25° 200 km REarth REarth Fig. A5.2.3.1: Geometric description of the positions of the ground station on the surface of the earth and the OTV with a fixed antenna in LEO. (Kristopher Ezra) Calculating the angular width of the antenna is a direct simplification of fig. A5.2.3.1 to fig. A5.2.3.2 below. From this figure we simply apply the definition of the tangent (Eq. A 5.2.3-1) function to obtain a value for α°. 200 km α° dreceiver Fig. A5.2.3.2: Simplification from figure one to determine the angular width (alpha) of a ground reciever directly beneath the orbiting OTV. (Kristopher Ezra) 𝜶 𝒕𝒂𝒏 (𝟐) = 𝒅𝒓𝒆𝒄𝒆𝒊𝒗𝒆𝒓 𝟐 𝟐𝟎𝟎 𝒌𝒎 = 𝟎.𝟎𝟏𝟑 𝒌𝒎 𝟐𝟎𝟎 𝒌𝒎 = 𝟔. 𝟓 × 𝟏𝟎−𝟓 Author: Kristopher Ezra (A5.2.3–1) Launch Vehicle – Attitude determination in LEO Section A5.2.3, Page X From this construction we see that α is equivalent to 0.007448 degrees. If we assume that the entire receiver must be visible to complete communications, then a simple subtraction of this value from the angular range of the OTV antenna gives the lower bound of the accuracy. This value is found to be 24.9926° which is probably much too inaccurate when compared with the upper bound on accuracy calculated next. Accuracy Upper Bound: In the upper bound case, the OTV antenna views the ground station on Earth’s horizon just as it comes into view. That is to say that the line-of-sight of the OTV is tangent to the surface of the Earth. Figure A5.2.3.3 shows this construction and introduces the key unknown to the problem. 90° x φ REarth REarth REarth Rearth + 200 200 km Fig. A5.2.3.3: A graphical representation of the upper bound case on the accuracy of attitude determination. This figure lays out key geometry for determining the maximum angular accuracy that could be required by OTV attitude determination equipment. (Kristopher Ezra) Applying the Pythagorean Theorem knowing that the value of REarth is 6378.1 km yields a value of 1609.73 km for x. This corresponds to the instantaneous line of sight distance from the OTV to the ground station. The next step in identifying the highest accuracy which could be required for attitude determination is finding the instantaneous rate of change of the angle φ. We begin from Equation A5.2.3–2 below which is the law of cosines applied to this problem. 𝑅𝐸𝑎𝑟𝑡ℎ 2 = (𝑅𝐸𝑎𝑟𝑡ℎ + 200)2 + 𝑥 2 − 2𝑥(𝑅𝐸𝑎𝑟𝑡ℎ + 200)cos(𝜑) Author: Kristopher Ezra (A5.2.3–2) Launch Vehicle – Attitude determination in LEO Section A5.2.3, Page X Realizing that x is a function of the angle φ and that REarth and the orbital height of the OTV remain fixed, we differentiate Eq. A5.2.3–2 with respect to φ. 0 = 0 + 2𝑥 𝑑𝑥 𝑑𝑥 (𝑅 −2 + 200) cos(𝜑) + 2𝑥(𝑅𝐸𝑎𝑟𝑡ℎ + 200)sin(𝜑) 𝑑𝜑 𝑑𝜑 𝐸𝑎𝑟𝑡ℎ From here we solve directly for dx/dφ algebraically as seen in Equation A5.2.3–3 below. 𝑑𝑥 𝑑𝜑 = −2𝑥(𝑅𝐸𝑎𝑟𝑡ℎ +200)sin(𝜑) 2(𝑥−(𝑅𝐸𝑎𝑟𝑡ℎ +200) cos(𝜑)) =𝐶 (A5.2.3–3) From the Pythagorean Theorem at the point where the line of sight of the OTV is exactly tangent to Earth’s surface, x = 1609.73 km and φ = 75.835°. Substituting these values into Eq. Appendix – 3, we see that the value of C is given by -1.0267x1017 km. Since the size of the dish receiver is small compared to x and dφ is very small compared to φ, we approximate that the upper bound of the attitude determination accuracy is given by dφ (which we obtain by rearranging Eq. Appendix – 3). In this case, dφ = dx/C where we let dx be equivalent to the diameter of the receiver dish. Then, 𝑎𝑏𝑠(𝑑𝜑) = 𝑎𝑏𝑠 ( 𝑑𝑥 0.026 𝑘𝑚 )= = 2.532𝑥10−19 𝑟𝑎𝑑 = 1.451𝑥10−17 𝑑𝑒𝑔 17 𝐶 1.0267𝑥10 𝑘𝑚 This value of 1.451x10-17 degrees is a good approximation of the maximum accuracy which could be required by the spacecraft. We note that this number is astronomically small and choose to make our antenna mobile. Author: Kristopher Ezra