modeling the loading share between an ostheosynthesis
advertisement

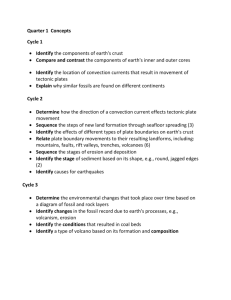
MODELING THE LOADING SHARE BETWEEN AN OSTHEOSYNTHESIS PLATE AND A HUMAN FEMUR Paulo P. K.1, Lucas L. V.2, Leandro A. F.2 1 Programa de Pós-Graduação em Engenharia Mecânica e Tecnologia de Materiais - PPEMM, CEFET/RJ, Rio de Janeiro (RJ), Brasil 2 Departamento de Engenharia Mecânica, CEFET/RJ, Rio de Janeiro (RJ), Brasil E-mail: pkenedi@cefet-rj.br, lucas.lvig@gmail.com, leandro_furtado@globo.com Abstract. This work analyses the loading share between a long bone and an ostheosynthesis plate. The model considers that the plate is in parallel arrangement with a human femur bone. Mechanics of Solids is used to relate the joint reaction force and three muscles loads, acting at proximal human femur, with the loads shared between bone and plate, at a medial position. The axial, shear, torsion and bending loads at plate cross section are explicitly estimated by analytic models. Three conditions are visited: a fully broken femur with an intact plate; both femur and plate intact, and an intact femur with a broken plate. Palavras-chave: Ostheosynthesis plate, Analytic model, Stress analysis 1. INTRODUCTION To minimize the recovery period for a patient with a fractured long bone, as a femur, an ostheosynthesis plate can be used (Orozzo, 2001), as shown schematically at Figure 1a. The plate shares load with the fractured bone, helping the fracture consolidation. To gain understanding of stress distribution at a plate medial cross section (Kenedi et al., 2011) modeled a fully broken femur with an intact plate and (Kenedi et al., 2012) modeled femur and plate, both intact. Mechanics of solids is used to relate external forces as the joint reaction force and three muscles loads, acting at proximal human femur, with the internal loads acting at a human femur medial cross section. Three conditions were analyzed: a fully broken femur with an intact plate; both femur and plate intact; and an intact femur with a broken plate. This last model, proposed by (Kenedi et al., 2009), was included only for comparative purposes. A rectangular cross section, of stainless steel, is used to represent an ostheosynthesis plate cross section and a hollow circular geometry, with constant thickness wall of cortical bone, is used to represent a long bone medial cross section, where the ostheosynthesis plate is attached. Note that the main goal of analytic calculations, instead using well established finite element method, is obtain a better understanding of internal loadings shares between bone and plate at a medial cross section. Figure 1 shows a fractured femur with a plate and the proximal femur loading. (a) (b) Figure 1. (a) Fractured femur with a plate and (b) proximal femur loading. The Figure 1.b shows the loading model configuration with four external static forces applied at femur's head, adapted from the fourth load case of human left femur’s head (Taylor et al., 1996). Note this external loading model is a severe simplification of real human's femur bone external loading. 2. LOADING HYPOTHESIS A few hypotheses have to be stated to simplify the analytic models construction. For instance, the external loading is represented by four static forces that are concentrated at proximal femur, no bone side ligaments are recognized, the analyzed cross section is medial, the plate shares load with bone if both are intact, the bone and plate cross sections are assumed to be, respectively, hollow circular and rectangular, no screw holes are analyzed and loads built-in by screws are not recognized. The bone tissue is assumed to be cortical and the plate material stainless steel, both modeled as isotropic. The distance of each force Pi to a generic medial cross section is labeled di. The external forces are named: Joint Reaction force (P1), Abductors force (P2), Iliopsoas force (P3) and Ilio-Tibial Tract force (P4) as in (Taylor et al., 1996). The forces can be written in a vector form, with bold-faced letters, as at (1.a). The distances, from each force to the cross section centroid, can also be written as a vector, as at (1.b): Pi Pi xg i Pi yg j Pi zg k di dixg i diyg j dizg k (1) Note that di has different values for each model as the cross section centroid alters its position as shown at Figure 2. i , j and k are unit vectors. Note that index i ranges from 1 to 4. The internal forces and moments, at a cross section centroid, written in global coordinates are: Vi xg Pi xg yg yg Vi Pi V zg P zg i i M ixg d iyg Pi zg d izg Pi yg yg zg xg xg zg M i d i Pi d i Pi M zg d xg P yg d yg P xg i i i i i (2) Where, the variables presented with g superscripts are referenced to global system coordinates. The forces and moments components, written in local coordinates (Figure 3), at a centroid cross section are : Vi x Pi xg y yg Vi Pi V z P zg i i M ix M ixg y yg Mi Mi M z M zg i i (3) Each local forces and moments are divided between plate (with subscript p) and bone (with subscript b) components: Vi x Vbx i V px y y y Vi Vb i V p V z V z V z b i p i M ix M bx i M px y y y M i M b i M p M z M z M z b i p i i i i i (4) i i The contribution of each internal force and each internal moment are summed up: Vx Vi x V y Vi y i i M x M ix My M iy i i Vz Vi z i M z M iz i (5) (6) where Vx and Vy are, respectively, the sum of transversal forces at x and y axis directions; Vz is the sum of normal forces; Mx and My are, respectively, the sum of bending moments refered to x and y axis; Vz is the sum of torsional moment. 3. ANALYTIC MODELS The analytic model is proposed through the utilization of mechanics of solids. Some simplified hypotheses have been assumed to generate these models were already stated at Loading Hypothesis item. The models are divided in: Only Plate (OP), Bone and Plate (BP) and Only Bone (OB). The OP model suppose that the bone is broken and the plate resist for all loading, the BP model suppose that plate and bone shares the loading and the OB model suppose that the plate is broken and only bone resist for all loading. Note that for application of expression (4), for analytic model OP, the terms with b subscript are zero and for analytic model OB, the terms with p subscript are zero. Figure 2 shows, qualitatively, the geometric differences and centroid positions for the three analyzed models. (a) (b) (c) Figure 2. Models cross section with centroid position: (a) OP, (b) BP and (c) OB. Note, at Figure 2, each model has a different centroid position, which modifies the distances di, affecting the moment components expression (2). It results in different sum moments expressions (2)-(6) for OP, BP and OB models. Next, the expressions for theses three analytic models are presented and commented. 3.1 The OP Model The model OP supposes that the bone is broken and the plate resist for all loading. The axial stress zop is: zop Vz Ap (7) where, Ap is the plate cross sectional area. The bending stress components, zop_ 1 I xop M xop y I xop and I yop and zop_ 2 M yop x zop_ 1 and zop_ 2 are: (8) I yop are second moments of area and x and y are distances from plate centroid to the point of interest. The transverse shear stress components, xop and yop are: xop V x Q yop x where, I yop B Qyop x and and Q xop y op y V y Q xop y I xop H (9) are first moment of area, B and H are, respectively, the plate width and thickness. The torsional stress, op is (Timoshenko, 1948): op M zop 0.267 H 2 B (10) 3.2 The BP Model The model BP supposes that bone and plate are sharing the load. To make the analytic model expressions more compact, some dimensionless constants are established: a* Ap e* Ab Ep Eb g* Gp j* Gb Jp (11) Jb Where b and p subscripts refer, respectively to, bone and plate. Also A is area; E is modulus of elasticity; G is shear modulus; J is polar second moment of area. As shown at Figure 3, the distance from plate/bone centroid, in x direction, to plate centroid is: X H D 2 1 a e * * (12) Figure 3 shows cross section main dimensions, local and global axis for a plate/bone cross section BP model. Figure 3. Cross section dimensions for BP model. Where D and d are, respectively bone external and internal diameters, θ is the angle between global and local axis (in this work θ = 180˚). To generate the axial expressions it is supposed that the axial load sum is shared between plate and bone. Also, as plate and bone are in a parallel configuration, their linear displacements are assumed to be equal. The BP model expressions show the plate stresses only. The plate axial normal stress expression is: zbp 1 * * 1 1 a e Vz Ap (13) To generate the bending expressions it is supposed that the bending moment sum is shared between plate and bone, referred to x and y axis. The “Método da Rigidez Equivalente”, (Pereira, 2003), was used to generate the bending expressions for this bi material model. The plate bending normal stress expressions are: zbp_ 1 EI x E p M xbp y EI x , for B B y 2 2 2 B 2 Eb I xbp Abs y b E p I xp 2 zbp_ 2 and EI y E p M ybp x EI , for y H H X x X 2 2 2 2 DH E p I yp Ap X Eb I b Ab X 2 (14) (15) The expressions for variables 𝑦̅𝑏 and 𝐴𝑏𝑠 are shown at Table 1, in Appendix. The expressions (14.a) and (15.a) uses Figure 4.b and the expressions (14.b) and (15.b) uses Figure 3. Figure 4 shows two geometric simplifications necessary to apply the analytic model. At Figure 4.a the rectangular side plate is transformed in an equivalent concentric circular cross section pattern for generation torsion expressions. At Figure 4.b part of bone cross section was removed, to simplify the composite cross section, to make feasible the bending and transverse shear expressions generation. (a) (b) Figure 4. Geometric simplification for: (a) torsion stress and (b) bending and transverse shear expressions. To generate the torsional expressions it is supposed that the torsional sum is shared between plate and bone, in a parallel configuration, that the rectangular cross section shaft maximum shear stress shown in (Timoshenko, 1948) could be used to generate an equivalent coaxial circular pattern with the bone cross section, as shown at Figure 4.a. The bone and plate angular displacements are assumed to be equal. The plate torsional shear stress is: zbp J 3 p 4 1 1 g * j * 1 M zbp (16) To generate the transverse shear expressions it is supposed that the transverse load sum is shared between plate and bone, referred to x and y axis. The “Método da Rigidez Equivalente”, (Pereira, 2003), was used to generate the transverse shear expressions for this bi material model. The plate transverse shear stresses expressions are: xbp ybp_1 ybp_ 2 V x Ep xs A EI B y B V y Eb y b Abs 2 , EI x H for B / 2 y D / 2 and B / 2 y D / 2 B V y Eb y b Abs E p y s A 2 for B / 2 y B / 2 EI x H (17) Where 𝑥̅𝑠 and 𝑦̅𝑠 are distances from plate centroid to a point at plate cross section (Kenedi et al., 2012). Although transverse shear stress expressions are rather complicated, it is normally negligible if compared with other three stresses (13)-(16). 3.3 The OB Model An analytic model of stress analysis of cross section at medial long bone, is developed (Kenedi et al., 2009), with a hollow circle cross section, with constant thickness wall. In this work the transverse shear stress expressions are simplified. Figure 5 shows the geometry and the main variables of this model. (a) (b) (c) Figure 5. OB model: (a) Geometric variables, (b) transverse shear variables and (c) bending variables. Figure 5.a shows the cross sectional area Ab , the average radius rm and thickness t, Figure 5.b shows the angle γ that defines the point of interest at external surface of a given cross section (where γ = 0° at positive xg axis). At Figure 5.c, y and x are respectively, the perpendicular distances from axis xg and yg to external bone surface. The axial stress zob is (Crandall, 1978): zob Vz Ab (18) The bending stresses components, zob_1 and zob_ 2 are (Crandall, 1978): zob_ 1 M xob y I xob and zob_ 2 M yob x (19) I yob The torsional stress zob is (Crandall, 1978): zob M zob D / 2 (20) Jb The transverse shear stress components xob and yob are (Crandall, 1978): xob Q xob V x Q yob I t and ob b y y and Qyob are first moment of area. perpendicular, respectively, to yg and xg axis. t xb yob V y Qxob I xobt xb and t by (21) are width at point of interest, 4. COMPARATIVE STUDY A comparative study is done between OP and BP models. Using the geometry and material of (Kenedi et al., 2012) result in: a* ≈ 0.15 and e* ≈ 10. For instance, for axial stress expressions (7) and (13), respectively from OP and BP models, is possible to show that the medial plate cross section has a 40% axial stress reduction when the plate begins to share the axial load with bone, in other words when passes from OP to BP model. For bending and torsional stresses the moment calculations are dependent of centroid positions, which turn the calculation a little more complex, but feasible with the aid of a mathematical software, like MathCad. The transverse shear stresses are, in general, almost negligible. Further results can be seen at (Kenedi et al, 2012). Note that these models happen at different periods of time, the OP model occurs at plate implantation and the BP model occurs latter, during bone consolidation. Also the application of the OP and BP analytic models can estimate, respectively, the maximum and nominal loads, for the same external loading, of a medial plate cross section. 5. CONCLUSIONS Three simple analytic models were developed, with limiting hypothesis, two of them describing a plate medial cross section stresses, the OP model - the plate resists full load and the BP model - the plate share load with bone. The OB model was also presented describing the stresses at a medial bone cross section, for comparative purposes. The analytic models were proposed, through the utilization of Mechanics of Solids concepts, to estimate the cross section stress distribution at an ostheosynthesis plate fixed to a human femur in two conditions: with and without bone sharing load, respectively BP and OP models. The OP model can be used as a superior limit for plate cross section stresses distribution, because it is supposed that the plate resist the entire load. It is a mono-material model and its expressions are simpler than bi-material BP model. Nevertheless the BP model recognize that the plate share load with bone, making it more realist during consolidation phase than former model. The main goal of these analytic models is generate explicit expressions that relate loads and stresses. Once the expressions are written in mathematical software, like MathCad, every variable can be altered as: distances, external forces, cross section dimensions, material properties; recalculating instantly the plate medial cross section stress distribution. Also, axial, bending, torsional and transverse shear stresses can be summed up through the application of a ductile failure criterion, as von Mises, at any point of the plate medial cross section. 6. REFERENCES Bayraktar, H.H., Morgan, E.F., Niebur, G. L., Morris, G. E., Wong, E.K, and Keaveny, T. M., (2004), “Comparison of the elastic and yield properties of human femoral trabecular and cortical bone tissue”, J. Biomech., Vol. 37, pp. 27-35. Bergmann, G., Deuretzbacher, G. Heller, M., Graichen, F., Rohlmann, A., Strauss, J. and Duda, G. N., (2001), “Hip contact forces and gait patterns from routine activities”, J. Biomech., Vol. 34, pp.859-871. Cilingir, A. C., Ucar, V. and Kazan, R., (2007), “Three-Dimensional Anatomic Finite Element Modeling of Hemi-Arthroplasty of Human Hip Joint”, Trends Biomater. Artif. Organs.., Vol. 21, No. 1, pp. 63-72. Crandall, S.H., Dahl, N. C. and Lardner, T. J., (1978), “An Introduction to the Mechanics of Solids”, Second Edition with SI units, Mc Graw Hill International Editions. Doblaré, M., García J. M. and Gómez, M. J., (2004), “Modeling bone tissue fracture and healing: a review”, Engineering Fracture Mechanics, Vol. 71, pp. 1809-1840. Duda, G. N., Heller, M., Albinger, J., Schulz, O., Schneider, E. and Claes, L., (1998), “Influence of muscle forces on femoral strain distribution”, J. Biomech., Technical Note, Vol. 31, pp. 841-846. Kenedi, P.P., Vignoli, L.L., Furtado, L. A, and Riagusoff, I. I. T., (2012), “Ostheosynthesis Plate Analytic Model”, Procedings of the 7th National Congress of Mechanical Engineering – CONEM 2012, São Luis, Maranhão. Kenedi, P.P., Riagusoff, I. I. T. and Pinto, T.F., (2011), "Ostheosynthesis Plate Stress Analysis, Proceedings of the 3rd National Meeting of Biomechanical Engineering – ENEBI 2011 , Iguazu Falls, Paraná. Kenedi, P.P. and Riagusoff, I. I. T., (2009), “Stress Analysis Models of Human Long Bones – Analytic and Finite Element Approaches”, Procedings of the 20th International Congress of Mechanical Engineering – COBEM 2009, Gramado, RS. Keyak, J. H., Rosi, S.A., (2000), “Prediction of femoral fracture load using finite element models: an examination of stress – and strain-based failure theories”, J. Biomech., Vol. 33, pp. 209-214. Orozzo, R., Sales, J. M. and Videla, M., (2001), “Atlas de Osteossíntese - Fraturas dos Ossos Longos”, Editora Manole. Pereira, J. C., (2003), “Curso de Mecânica dos Sólidos A”, Universidade Federal de Santa Catarina, Departamento de Engenharia Mecânica, GRANTE, <http://vsites.unb.br/ft/enc/pagdisc/Isostat/arquivos/MECSOL.pdf >. Petrtyl, M., Herf, J. and Fiala, P., (1996), “Spatial Organization of the Haversian Bone in Man”, J. Biomech., Vol. 29, No. 2, pp. 161-169. Rapoff,A.J.,(2007),engineering.union.edu/~rapoffa/MER440/Module%205/Representative %20Properties%20of%20Bone.pdf” Rudman, K.E., Aspden, R.M. and Meakin, J.R., (2006), “Compression or tension? The stress distribution in the proximal femur”, Biomedical Engineering Online, vol.5, No.12. Spiegel, M.R., (1992), “Manual de Fórmulas, Métodos e Tabelas de Matemática”, 2ºEdição, Makron Books. Taylor, M.E., Tanner, K.E., Freeman, M.A.R. and Yettram, A.L., (1996), “Stress and strain distribution within the intact femur: compression or bending ?”, Med. Eng. Phys., Vol. 18, No. 2, pp. 122-131. Timoshenko, S., (1948), “Strength of Materials – Part I – Elementary Theory and Problems”, Second Edition, D. Van Nostrand Company. 7. APPENDIX Distances, cross sectional areas, first and second moment area expressions are present at this appendix, at Table 1, in order to maintain the three models presentation straightforward. Table 1 – Geometric variables IBH OP model BP model distances yb cross section areas first moment Qxop y areas H 2 polar second moment areas HB I xop 12 H 3B op Iy 12 J op 2 Ab B 2 2 y 2 D2 d 2 (*) (*) 4 Qxob Qyob 2 cos rm2 t I xbp areas D d sin 2 2 D d for sin 2 2 D d for cos 2 2 D d for cos 2 2 for 2 B H 2 x 2 2 3 second moment B2 12 Abs 2 1 B D2 B2 4 B D 2 sin 1 D 2 Abs Ap BH Q yop x D 3 OB model D cos , t xb 2t , D sin , t by 2t , 2 BH 2 H 2 3 1.8 B 1 2 2 B D B 32 BD 2 4 4 D4 4 3 2 D2 B2 (*) I ob I xob I yob 64 D 4 d4 1 B 2 sin D 3 J ob 4 D d 4 4 (*) These expressions are simplification that are valid for t << rm, for a more precise formulation see (Kenedi et al, 2009). To simplify notation the angle γ has origin at x g axis positive for the calculation of Qxob and has origin at yg axis negative for calculation of Qyob .